Мониторинг коллокации геостационарных спутников с помощью
реклама

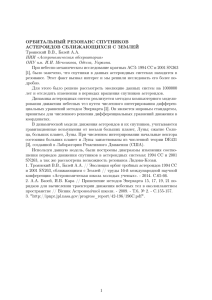
УДК 629.7 Махненко Ю.Ю. МОНИТОРИНГ КОЛЛОКАЦИИ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ С ПОМОЩЬЮ МАЛОБАЗОВЫХ РАДИОИНТЕРФЕРОМЕТРОВ Федеральное унитарное государственное предприятие «Космическая связь» В данном докладе рассматривается проблема безопасного управления движением нескольких спутников, удерживаемых в окрестности общей точки стояния на геостационарной относительного орбите. расстояния между Описана процедура спутниками контроля обработкой дифференциальных измерений малобазового радиопеленгатора. Приведены схема получения измерений, процедура обработки и прогнозирования относительного расстояния, результаты ее проверки как на модельных примерах, так и в реальных ситуациях. Ключевые слова: геостационарный спутник, коллокация, радиопеленгатор, обработка измерений. Мониторинг спутников при их удержании в окрестности общей точки стояния на геостационарной орбите (коллокация) заключается в осуществлении оперативного контроля относительного положения спутников для обнаружения возникновения их опасных сближений, т.е. нарушения ограничения: R Rk , (1) где R – текущее значение относительного расстояния между спутниками - R ( r2 l2 n2 ) ; r, l, n – отклонения в положении двух спутников в направлениях радиуса-вектора, соответственно; вдоль орбиты и по нормали к плоскости орбиты Rk - допустимая граница для идентификации опасного сближения. Выбор значения для ограничения Rk достаточно важен [1,2]: его занижение может приводить к пропуску действительно опасного сближения, а неоправданное завышение – к слишком частой идентификации несуществующей опасности (ложной тревоге) и выполнению необязательных действий (дополнительных маневров) для ее устранения, что неизбежно увеличивает эксплуатационные затраты. Оценки показывают [2,3], что вероятность ложной тревоги (отношение количества ложно обнаруженных опасных сближений к общему числу таких сближений) очень чувствительна к значению границы Rk в неравенстве (1). Поэтому необходимо стремиться к ее возможному снижению. Известные подходы к обеспечению надежного мониторинга опасных сближений спутников при выполнении каждым из них штатных циклов управления удержания в заданном угловом диапазоне по широте и долготе относительно номинальной точки стояния основаны на повышении точности контроля параметров орбиты каждого из спутников [1,4]. Их общим недостатком является необходимость привлечения дополнительных измерительных средств и, значит, заметное возрастание эксплуатационных затрат. Кроме того, геостационарного алгоритмы спутника управления разрабатываются, удержанием как конкретного правило, без учета возможной коллокации с другими спутниками и могут не предусматривать какие-либо их изменений. В основе разработанной процедуры заложено положение о том, что повышение точности контроля относительного положения двух спутников не обязательно должно основываться на повышении точности контроля параметров орбиты каждого из них. Для этого может быть достаточным выполнение непосредственного оценивания относительного расстояния между спутниками благодаря дифференциальные возможности (разностные) формировать измерения текущих специфические навигационных параметров близких спутников [5-7]. Достоинством дифференциальных измерений является эффективное устранение вызываемых условиями распространения общих для сигналов от обоих спутников погрешностей, что позволяет существенно повышать точность оценивания относительного расстояния при обработке таких измерений. Малобазовый радиоинтерферометр благодаря таким достоинствам, как широкий и легко перестраиваемый диапазон частот, высокая чувствительность, точность определения направления на источник сигнала, способность одновременного приема и обработки нескольких сигналов от контролируемых спутников, является весьма подходящим измерительным средством для получения высокоточных дифференциальных измерений. Если номиналы частот сигналов попадают в энергетический спектр пеленгатора, то обработка разностей одновременно выполненных углов направления линий визирования с интерферометра на каждый из спутников позволяет с высокой точностью контролировать относительное расстояние между двумя (и более) спутниками. В противном случае прием сигналов выполняется последовательно с перенастройкой опорной частоты и последующей интерполяцией соответствующих угловых измерений на один момент времени (при естественном снижении как точности дифференциальных измерений, так и точности контроля относительного расстояния между спутниками). На рис.1 приведена схема радиоинтерферометра для контроля относительного расстояния между двумя спутниками – КА1 и КА2, где обозначено: (t ) и (t ) - измеренные значения разности фаз одновременно принятых в моменты времени tk , k s, s 1, s 2,... сигналов по азимутальной и 1 k 1 k угломестной базам интерферометра от 1-го спутника; (t ) и 2 i ti , i (t ) - разности фаз одновременно принятых в моменты времени 2 i p, p 1, p 2,... сигналов по интерферометра от 2-го спутника. азимутальной и угломестной базам Если конструкция интерферометра не позволяет получать указанные измерения от двух спутников одновременно (моменты времени tk и ti не совпадают), предусмотрена процедура проведения попеременного выполнения измерений по каждому спутнику и интерполяции соответствующих значений угловых измерений по 2-му спутнику на времена проведения измерений по 1му спутнику с использованием интерполяционной формулы Лагранжа [8]: Далее формируются дифференциальные измерения, используемые при обработке для расчета параметров относительного движения КА1 – КА2: (ti ) (ti ) (t ) 1(ti ) 1 i (t ) 2 (ti ) 2 i (2) Обработка полученной пары дифференциальных измерений для получения текущего (а также прогнозного) значения относительного расстояния между контролируемыми КА1 и КА2 выполняется с помощью процедуры расширенной Калмановской фильтрации [1,8]. При этом в состав вектора состояния включаются отклонения в положении двух спутников также отклонения в составляющих векторов скорости r, l , n , а Vr , Vl , Vn . Анализ возможностей разработанной процедуры контроля относительного расстояния между дифференциальных геостационарными измерений от спутниками малобазовых обработкой радиоинтерферометров выполнялся с использованием как модельных примеров, так и в реальных ситуациях. Модельные оценки позволили осуществить выбор конкретных значений параметров и характеристик используемого фильтра: - начальных параметров для запуска процедуры обработки дифференциальных измерений; - ошибок измерений; - элементов матрицы шумов модели движения спутников как функций временного интервала, немоделируемых ускорений, наличия или отсутствия маневров на интервале обработки и прогнозирования движения спутников. С А Ба за “В ост ок” Приемник ” ер ев С “ за Ба В Приемник Приемник Сигнал от 1-го спутника Измерение разности фаз по азимуту 1-го спутника Измерение разности фаз по углу места 1-го спутника Сигнал от 2-го спутника 1 1 Измерение разности фаз по азимуту 2-го спутника Измерение разности фаз по углу места 2-го спутника 2 2 Измерение сдвига фаз по азимуту 1-го и 2-го спутников 1 2 Измерение сдвига фаз по углу места 1-го и 2-го спутников 1 2 Обработка разностей угловых измерений для оценки относительного расстояния Рис. 1. Схема малобазового радиоинтерферометра с формированием дифференциальных измерений от двух геостационарных спутников Была установлена строгая зависимость точности прогнозирования относительного расстояния между спутниками от точности измерений на начальном этапе их обработки и практическая независимость спустя 10-12 часов обработки. Время сходимости фильтра не превышало 9-11 часов. Включение параметров маневра в состав уточняемых при обработке измерений параметров позволяет повысить точность определения относительного расстояния и является более универсальным способом, чем подбор матрицы шума. Проверка процедуры в реальных ситуациях выполнялась при обработке дифференциальных измерений спутников «Экспресс-АМ2» и «Экспресс-МД1», удерживаемых в окрестностях общей точки стояния 80.0º в.д. Отклонение оценок относительного расстояния от их номинальных значений (полученных в штатных циклах определения орбиты каждого спутника) не превышали 300 метров на интервале обработки и на полусуточном интервале прогнозирования. Литература 1. Урличич Ю.М., Махненко Ю.Ю. и др. Современные технологии навигации геостационарных спутников.– М.: ФИЗМАТЛИТ, 2006. – 272 с. 2. F.Sawada and S.Kawase: Near-Miss Analysis for Non-coordinated, Colocated Geosynchronous Satellites, 7th Workshop on Astrodynamics and Flight Mechanics, ISAS, Sagamihara, July 1997. 3. Мешков М.Н. Малобазовые корреляционно-фазовые радиопеленгаторы типа «Ритм», как средства навигационно-баллистического обеспечения КО различного назначения // Труды НТК Роскосмос», ФГУП РНИИ КП - М.: ФИЗМАТЛИТ, 2008. – с. 178. 4. Soop M. Handbook of Geostationary Orbits – Space Technology Library, Kluwer Academic Publishers, 1994. - p. 309. 5. S.Kawase and F.Sawada. Relative Orbit Estimation of Close Geosynchronous Satellites using Differential Radio Interferometer. Communications Research Laboratory, Kashima-Shi, Ibaraki 314 Japan, P. 205-210. 6. Мешков М.Н. Обеспечение режима коллокации геостационарных спутников связи «Экспресс-АМ» // Радиотехнические Тетради. 2009, № 39. С.61-64. 7. S.Kawase. Radio-interferometer for geosynchronous orbit survey. J. of Astronautical Sciences, 1999. V.47, № 2, Р. 151-163. 8. Tapley B. et al. Statistical Orbit Determination. Elsevier Academic Press, 2004, - р. 547.