Плоскопараллельное движение твердого тела
advertisement

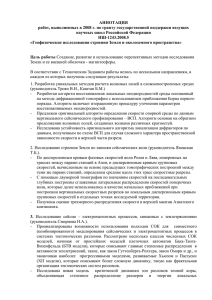
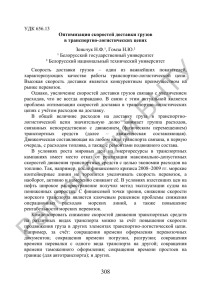
Министерство образования Российской Федерации. Государственное образовательное учреждение высшего профессионального образования «САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» Кафедра «МЕХАНИКА» ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА Данное пособие входит в серию электронных учебных пособий по теоретической механике, разрабатываемых на кафедре механики СамГТУ. Пособие предназначено для самостоятельного изучения студентами темы «Плоскопараллельное движение твердого тела». Зав. кафедрой – д.т.н., проф. Я.М.Клебанов, Разработчики – Л.Б.Черняховская, Л.А.Шабанов. Самара – 2008. 1 Определение плоскопараллельного движения Плоскопараллельным называz ется такое движение твердого тела (рис.1), при котором траА1 ектории всех его точек лежат в О плоскостях, параллельных одной А и той же неподвижной плоско1 сти. А2 Неподвижная плоскость на- x зывается основной. Примером плоскопараллельного П движения может служить движение цилиндра по горизонтальной плосРис.1 кости, при котором его основание остается параллельным вертикальной плоскости (рис.2). y Основная теорема плоскопараллельного движения. z Все точки тела, лежащие на общем перпендикуляре к основной плоскости, движутся по одинаковым у траекториям и имеют геометричеО ски равные скорости и ускорения. Такими точками (рис.1) являются точки А, А1, и А2. x Рис.2 Сформулированное свойство является следствием определения плоскопараллельного движения. Действительно, из определений плоскопараллельного движения и твердого тела следует, что углы между любыми прямыми, фиксированными в твердом теле, сохраняются неизменными. Следовательно любая прямая А1А2 , проведенная в теле, перпендикулярно основной плоскости П, будет перемещаться поступательно, т.е. траектории, скорости и ускорения всех точек этой прямой будут одинаковыми. Таким образом, для определения движения тела необходимо знать движение лишь одной точки каждой прямой, проведенной перпендикулярно плоскости П, т.е. точки, лежащие в одной плоскости 1, параллельной основной плоскости, определяют плоскопараллельное движение твердого тела. Плоскопараллельное движение твердого тела полностью характеризуется движением плоской фигуры в своей плоскости. Плоская фигура (рис.1) получается сечением твердого тела плоскостью 1, параллельной основной плоскости П. Движение плоской фигуры в своей плоскости называется плоским. 2 Задание плоского движения Рассмотрим движение плоской фигуры в своей плоскости. Положение плоской фигуры в своей плоскости определяется положением двух ее точек. Пусть точки (рис.3) А (хА,уА) и В (хВ, уВ) – две точки плоской фигуры, движущейся в плоскости Оху. Так как расстояние между этими точками остается постоянным ( x A − xB )2 + ( y A − yB )2 = d 2 , у то из четырех координат, определяющих положение этих точек, независимых осА тается только три. Таким образом, для описания плоского движения требуется знать три независимых параметра. х О Свяжем жестко с плоской фигурой Рис. 3 систему координат Ах1у1 (рис.4). Тогда положение системы Ах1у1 , а вместе с ней и положение плоской фигуры относительно системы координат Оху будет определено заданием координат хА,уА точки А и углом между φ между осями Ах1 и Ах2 (рис.4). Следовательно, положение плоской фигуры в своей плоскости в любой момент времени полностью определяется тремя функциями времени В x A = x A (t ), у2 у у1 х1 φ ϕ = ϕ (t ). х2 А уА О y A = y A (t ), хА х Рис. 4 (1) Уравнения (1) называются уравнениями движения плоской фигуры или уравнениями плоскопараллельного движения твердого тела. Первые два уравнения (рис.3) определяют положение выбранного полюса А на плоскости, последнее - угол поворота вокруг этого полюса. 3 Уравнения плоского движения. Движение плоской фигуры в своей плоскости складывается из двух движений: поступательного вместе с произвольно выбранной точкой (полюсом), и вращательного вокруг этого полюса. Положение плоской фигуры на плоскости определяется положением выбранного полюса и углом поворота вокруг этого полюса, поэтому плоское движение описывается тремя уравнениями: x A = x A (t ), y A = y A (t ), ϕ = ϕ (t ). Первые два уравнения (рис.5) определяют то движение, которое фигура совершала бы при φ = const, очевидно, что это движение будет поступательным, при котором все точки фигуры будут двигаться так же, как полюс А. Третье уравнение определяет движение, которое фигура совершала бы при хА = const и уА = const, т.е. когда полюс А будет неподвижен; это движение будет вращением фигуры вокруг полюса А. При этом вращательное движение не зависит от выбора полюса, а поступательное движение характеризуется движением полюса. Определение скоростей точек плоской фигуры 3.3.1. Зависимость между скоростями двух точек плоской фигуры. у1 А rA ρ B х1 rB х О Рассмотрим две точки А и В плоской фигуры. Положение точки В относительно неподвижной системы координат Оху определяется радиусом-вектором rB (рис.5): rB = rA + ρ, Рис. 5 где rA - радиус-вектор точки А, ρ = АВ вектор, определяющий положение точки В относительно подвижных осей Ах1у1, перемещающихся поступательно вместе с полюсом А параллельно неподвижным осям Оху. Тогда скорость точки В будет равна VB = drB dr dρ = A+ . dt dt dt 4 drA = V A является скоростью полюса А. dt dρ равна скорости, которую точка В получает при rA = соnst, т.е. Величина В полученном равенстве величина dt относительно осей Ах1у1 при вращении фигуры вокруг полюса А. Введем для этой скорости обозначение VBA : VBA = dρ . dt Следовательно, V B = V A + VBA Скорость любой точки В плоской фигуры равна геометрической сумме скорости VA выбранного полюса А и скорости VBA точки во вра- В щательном движении вокруг полюса (рис.6): А β В 90 0 α V B = V A + VBA . VA VA (2) Скорость вращательного движения VBA точки направлена перпендикулярно отрезку АВ и равна VB VBA = ω ⋅ AB VBA Рис.6 Модуль и направление скорости точки В находится построением соответствующего параллелограмма (рис.6). Задача 1. Найти скорости точек А, В и D обода колеса, катящегося по прямолинейному рельсу без скольжения, если скорость центра колеса С равна VC. VC B VB Решение. Выбираем точку С, скорость VА VBC VАС которой известна за полюс. Тогда скорость точки А равна VC C VC VC D А V A = VC + V AC , V AC ⊥ AC где и по модулю VPC VAC = ω ⋅ AC = ω ⋅ R . VC VDC VD Значение угловой скорости ω найдем из P условия того, что точка Р колеса не скользит Рис. 7 по рельсу и, следовательно, в данный момент равна нулю VР = 0. В данный момент скорость точки Р равна VP = VC + VPC , где VPC = ω ⋅ PC = ω ⋅ R . 5 Так как в точке Р скорости VPC и VC направлены по одной прямой противоположные стороны и VР = 0 , то VPC = VC, откуда получаем, что ω = VC./R, следовательно, VAC = ω R = VC. Скорость точки А является диагональю квадрата, построенного на взаимно перпендикулярных векторах V A и VAC , модули которых равны, следовательно V A = VC 2 . Аналогично определяется скорость точки D. Скорость точки B равна VB = VC + VBC , при этом скорости VC и VBC равны по модулю и направлены по одной прямой, поэтому VB = 2VC . План скоростей План скоростей представляет собой графический метод определения скоростей точек плоской фигуры. Пусть известны вектор скорости точки А и направление скорости точки В плоской фигуры (рис.8). Определим вектор скорости точки В. Скорость точки В определяется формулой VB = VA + VBA . В этой формуле известны направление и модуль скорости точки А и направления векторов VB и VBA ( VBA ⊥ AB ). Выбираем (рис. 8а) неподвижный центр О, откладываем от него в произвольно выбранном масштабе вектор Oa = V A , получаем точку а. Затем из центра О поводим прямую, параллельную скорости VB , а из точки а проводим прямую, параллельную скорости VBA , (перпендикулярно отрезку АВ). Точка пересечения этих прямых определяет точку в. Соединяем центр О с точкой в, получаем вектор Ob = VB , в полученном треугольнике Оав вектор ab = VBA . а VA А С ⊥ AC ⊥ AB В с О в Рис.8 а в Рис.8а О ⊥ BC Рис.8 б 6 Определим на плане скоростей модуль и направление скорости еще одной точки С. На основании формул VC = VA + VCA , VC = VB + VCB Можно записать V A + VCA = VB + VCB . Проведем из точки а прямую (рис.8 б), перпендикулярно отрезку АС (так как VCA ⊥ AC ). Конец вектора VCA должен лежать на этой прямой. Из точки b проведем прямую перпендикулярно отрезку ВС ( VCB ⊥ BC ). Конец вектора VCB лежит на этой прямой. Следовательно, точка пересечения прямых, проведенных из точек а и b, определит точку с. Соединяя центр О с точкой с прямой, получим вектор Oc = VC Фигура Оаbс представляет собой графическую картину распределения скоростей плоской фигуры и называется планом скоростей. Точки а.b, с называются вершинами плана скоростей, векторы Oa , Ob , Oc представляют скорости точек А, В, С. Векторы ab , bc , ac равны скоростям точек В, при вращении вокруг соответствующих полюсов. Как следует из построения треугольники АВС и авс подобны и повернуты друг относительно друга на угол 900. Пример. Определить скорости точек В и С шатуна кривошипношатунного механизма (рис.9) путем построения плана скоростей, если известно, что угловая скорость кривошипа ОА равна ω и АС = СВ. Решение. Скорость точки А перпендикулярна кривошипу и равна VA = ω OA. Скорость VB точки В направлена горизонтально влево. VB = VA + VBA , VBA ⊥ AB . Выберем полюс О и отложим из него в выбранном масштабе вектор Oa = V A . Из этого же полюса проведем прямую, параллельную вектору VB . Затем из конца вектора Oa поведем прямую, перпендикулярную шатуну АВ. Точка пересечения этой прямой и прямой, параллельной VB , определяет ко VA а A C с O VB Pис.9 О в B Pис.9 а 7 нец вектора ab = VBA . Аналогично, VC = VA + VCA , VCA ⊥ CA . Кроме того, VCA CA = . VCA BA Для того, чтобы определить вектор Oc = VC , разделим пополам на плане скоростей отрезок ав (рис.9а) полученную точку с соединим с точкой О вектором Oc = VC . Теорема Жуковского. Проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны между собой (рис.10). Рассмотрим две точки А и В плоской фигуры. Выбираем точку А за полюс, тогда скорость точки В связывается со скоростью точки А равенством VB VBA VA VA V B = V A + VBA . β 900 α α В А Проектируя это равенство на прямую АВ, и учитывая, что VBA ⊥ AB , находим Рис. 10 VB cos β = VA cosα . Таким образом, проекции скоростей точек А и В на прямую АВ равны: пр (VA)AB = пр(VВ)AB. Мгновенный центр скоростей . Свойства м.ц.с. Мгновенным центром скоростей называется точка Р плоскости, жестко связанной с плоской фигурой, скорость которой в данный момент равна нулю. Теорема о существовании мгновенного центра скоростей. VA А В 900 900 Р Рис.11 VB Докажем, что при плоском движении существует точка, скорость которой в данный момент равна нулю. Пусть в момент времени t точки А и В плоской фигуры (рис.11) имеют скорости VA и VB, не параллельные друг другу. Проведем к скоростям в точках А и В перпендикуляры и определим точку их пересече8 ния Р. Находим скорость этой точки с помощью теоремы Жуковского: пр (VA)AР = пр(VP)AР. пр (VВ)AР = пр(VP)AР. Так как скорость VA ⊥ AP , то ее проекция на прямую АР равна нулю, точно также проекция VB на прямую ВР равна нулю. Оказалось, что проекции скорости точки Р на две пересекающиеся прямые АР и ВР равны нулю, следовательно, скорость точки Р равна нулю. Таким образом, точка Р является мгновенным центром скоростей. Свойства мгновенного центра скоростей Выберем мгновенный центр скоростей Р плоской фигуры за полюс. Тогда скорость точки А будет V A = VP + V AP . Скорость точки Р равна нулю, следовательно, V A = V AP . Скорости точек плоской фигуры в данный момент определятся так, как будто плоская фигура вращается вокруг мгновенного центра скоростей. Отсюда следует: 1. Скорость каждой точки направлена перпендикулярно отрезку, соединяющему точку с мгновенным центром скоростей: V A ⊥ AP, V B ⊥ BP. 2. Скорость каждой точки равна произведению угловой скорости плоской фигуры на расстояние точки до мгновенного центра скоростей. V A = ω AP, VB = BP. 3. Скорости точек плоской фигуры пропорциональны их расстояниям до мгновенного центра скоростей V A AP = VB BP 4.Угловая скорость плоской фигуры равна скоростей любой ее точки, деленной на расстояние до мгновенного центра скоростей. ω= V A VB = . AP BP 9 Способы нахождения мгновенного центра скоростей Для определения положения мгновенного центра скоростей плоской фигуры необходимо знать только направления скоростей двух ее точек. Указанные свойства позволяют определить положение мгновенного центра скоростей плоской фигуры в различных случаях. VA А В 900 900 Р VB 1. Если скорости двух точек не параллельны, то мгновенный центр скоростей лежит в точке пересечения перпендикуляров к ним, что следует из теоремы о существовании мгновенного центра скоростей (рис.12). 2. Если плоское движение осуществляется качением без скольжения одного твердого тела по неподвижной поверхности другого, то точка их контакта Р имеет в данный момент скорость, равную нулю, и, следовательно, будет мгновенным центром скоростей (рис.13). Рис.12 Р Рис.13 3. Если скорости двух точек А и В плоской фигуры параллельны и с прямой, соединяющей эти точки, составляют прямые углы, то мгновенный центр скоростей Р находится как точка пересечения общего перпендикуляра, восстановленного к скоростям в данных точках, и прямой, проходящей через концы векторов скоростей (рис.14 и рис.15). 4. Если скорости двух точек параллельны и с прямой, соединяющей точки образуют острые углы, то мгновенный центр скоростей не существует (находится в бесконечности). В этом случае скорости всех точек плоской фигуры равны, а угловая скорость равна нулю (рис. 16). А В VA 90 А 0 VA 90 0 VA А VB 900 Р Рис. 14 Р 900 VB В VB В Рис. 15 Рис. 16 10 Решение задач с помощью мгновенного центра скоростей. Задача 1. Найти скорости точек А, В и D обода колеса, катящегося по прямолинейному рельсу без скольжения, если скорость центра колеса С равна VC. Определить скорости точек А, В, D и угловую скорость колеса. Решение. Мгновенный центр скоростей Р колеса находится (рис.177) в точке контакта колеса с неподвижной плоскостью. Скорости точек А, В, D перпендикулярны к отрезкам, соединяющим эти V D точки с точкой Р, модули скоростей пропорциоD нальны их длинам: VA Расстояния точек А и В до мгновенного ценVC С В тра скоростей одинаковы, следовательно, скороА сти этих точек равны VB V A = V B = VC 2 . P Рис.17 Скорость точки D равна 2VC , так как расстояние точки D до мгновенного центра скоростей в два раза больше расстояния СР . V A AP AP = ; V A = VC ; VC CP CP AP = R 2 , V A = VC 2. Угловая скорость колеса равна ω = VC VC = . CP R Задача.2. Диск зажат между двумя рейками, (рис.18) которые движутся со скоростями V1 и V2 (V1 > V2). Определить угловую скорость диска и скорость его центра, если его радиус равен R. Решение. Скорость точки А диска равна скоVA А рости верхней рейки, а скорость точки В – скороa сти нижней рейки. Мгновенный центр скоростей находится в точке Р (рис.16). Скорость точки С явVC С ляется средней линией трапеции ВАав: с V + V2 VC = 1 . 2 V В B Угловая скорость b Р Рис.18 ω= VA V V − VB V − V2 = B = A . = 1 2R AP BP AP − BP Задача 3. Кривошипно-шатунный механизм 11 Угловая скорость кривошипа равна ωОА. Определить угловую скорость шатуна и скорости точек А,В, и С для трех положений механизма. Кривошип ОА вращается вокруг точки О, шатун АВ совершает плоское движение в плоскости чертежа. Во всех случаях скорость точки А перпендикулярна кривошипу и равна V A = ωOA OA. , а скорость точки В направлена по горизонтальной прямой. 1. Кривошип ОА образует острый угол с горизонтальной прямой (рис.19). В этом случае мгновенный P центр скоростей шатуна находится в точке Р, где пересекаются восстановленные в точках А и В перпендикуляры к скоростям в этих точках. V A AP = VB BP VA A VC ⇒ VB = V A BP . AP Скорость точки С направлена перпендикулярно отрезку РС и находится из пропорции: C VC CP = V A AP O VB B ⇒ VC = V A Угловая скорость шатуна равна ω AB = Pис.19 CP . AP VA AP 2. Кривошип и шатун расположены на одной прямой (рис.20). В этом положении мгновенный центр скоростей находится в точке В, поэтому скорость VB равна нулю. СкоVA рость точки С находится из пропорции: VC VC CB CB = ⇒ VC = V A . O V A AB AB A C B Угловая скорость шатуна равна Рис.20 V ω AB = A . AB VA A VC C O VВ B 3. Кривошип занимает вертикальное положение (рис.21). В этом случае мгновенный центр скоростей шатуна находится в бесконечности, скорости всех его точек равны, угловая скорость шатуна равна нулю. Рис. 21 12 Задача 4. Определить скорости точек А, В, Р подвижного блока 3 (рис.22) и его угловую скорость, если скорость тела 1 равна V1 Решение. Подвижный блок совершает плоское движение. Скорость точки контакта Р подвижного блока с неподвижной нитью равна нулю: VР = 0, т.е. точка Р – мгновенный центр скоростей подвижного блока. Скорость точки С перпендикулярна отрезку, соединяющему ее с мгновенный центром скоростей: VC ⊥ CP . Скорости точек при плоском движении про2 порциональны расстояниям до мгновенного центра О скоростей VC CP VС VА = . V A AP Р С А VA = V1, так как точка А и тело 1 связаны не1 растяжимой нитью, тогда 3 B VC 0,5 R = . Рис.22 V1 R V1 Следовательно, VC = 0,5 VA = 0,5 V1. Задача 5. Определить угловую скорость и скорости точек А, В, С и Р катушки 3 (рис.23), если скорость груза 1 равна V1. VA A VC С r 3 R P B VB O 2 Рис.23 V1 Отсюда Решение. Скорость точки В катушки равна скорость груза 1, так как они связаны нерастяжимой нитью: VВ = V1. При качении без скольжения в точке контакта катушки с рельсом находится мгновенный центр скоростей Р. Скорости точек А и С перпендикулярны отрезкам, соединяющим эти точки с мгновенным центром скоростей и пропорциональны их расстояниям до мгновенного центра скоростей, поэтому VC CP VC r = ; . = VB BP VB R − r VC = V B r r = V1 R−r R Аналогично определим скорость точки А. VA AP VA r + R = ; = . VB BP VB R − r Следовательно, 13 VA = VB r+R r+R = VB . R−r R−r Задача 6. Определить угловую скорость и скорости точек А, В, D, E шестерни 3 (рис.24), которую приводит в движение кривошип ОА, вращающийся вокруг оси О неподвижной шестерни 1 с угловой скоростью ωОА. 3 В VA VD D А 1 В VВ Е ωАВ О Рис.24 2 D VA А VE Е P О Рис.24 a Решение. Скорость точки А, принадлежащей кривошипу ОА, перпендикулярна кривошипу и равна VA = ωAB AB. Шестерня 3 совершает плоское движение, ее мгновенный центр скоростей находится в точке зацепления Р с неподвижной шестерней 1 (рис. 24а). Скорости точек В, Е и D перпендикулярны отрезкам, соединяющим их с мгновенным центром скоростей. VB ⊥ BP , VD ⊥ DP , VE ⊥ EP . Скорости точек пропорциональны отрезкам, соединяющим эти точки с мгновенным центром скоростей Р. VB = VE , так как расстояния этих точек до мгновенного центра скоростей равны: ВР = ЕР. BP R 2 VA AP = ; откуда VB = V A = VA = VA 2. VB BP AP R Аналогично определяем скорость точки D. VA AP DP 2R = ; откуда VD = VA = VA = 2VA . VD DP AP R Задача 7. Определить скорости точек А, В, С, D и угловые скорости звеньев механизма, изображенного на рис. 25, если угловая скорость кривошипа ОА равна ωОА. Решение. Во всех вариантах скорость точки А, являющейся концом кривошипа ОА, равна VA = ωОА OA и перпендикулярна кривошипу. 14 Звенья ОА и ОВ механизма (рис.25) совершают вращательное движение. Скорость точки А, являющейся концом кривошипа ОА, равна VA = ωОА OA и перпендикулярна кривошипу. Скорость VB ⊥ OB .Звенья АС и ВD совершают плоское движение. Звено СD движется поступательно, поР2 этому скорости точек C и D равны: VC = V D . VB Мгновенный центр скоростей A B звена АС лежит в точке Р1 пересеVA чения перпендикуляров к скоростям ωOA O в точках А и С. D VC VC CP1 С = , VC = VA CP1 . VD VA AP1 AP1 Угловая скорость звена АС равна V ω AC = A . Рис.25 AP1 Р1 Проведем перпендикуляры к скоростям VВ и VD , точка их пересечения Р2 - мгновенный центр скоростей VB BP2 = , откуда VB = VD BP2 . звена ВD. VD DP2 DP2 Угловая скорость звена ВD равна V ωBD = B . BP2 Задача 8. Определить скорости точек А, D и угловые скорости звеньев механизма, изображенного на рис. 26, если угловая скорость кривошипа ОА равна ωОА. Скорость точки А равна VA = ωОА OA и перпендикулярна кривошипу ОА. Звено АВ совершается плоское движение, скорость точки В направлена вертикально вниз. Мгновенный центр в данный момент находится в бесконечности, поэтому скорости всех его точек равны, а угловая скорость ω AB = 0 . Скорость точки D перпендикулярна кривошипу О2D, следовательно, мгновенный центр скоростей звена ВD совпадает с точкой О2. Тогда А О1 D VD ωОА VA В Рис.26 DO2 . BO2 Угловая скорость звена BD V V равна ωBD = B = D . BO2 DO2 VD = VB 900 О2 VB VD DO2 = ; откуда VB BO2 15 Угловая скорость кривошипа O2D равна ωBD = VD . DO2 Задача 9. Определить скорости точек А, С, D и угловые скорости звеньев механизма, изображенного на рис. 25, если угловая скорость кривошипа ОА равна ωОА (рис.27). Решение. Звенья О1А и О2В совершают вращательные движения, поэтому скорость точки А направлена перпендикулярно кривошипу О1А и равна VA = ωОА· OA. Скорость точки D перпендикулярна звену О2D. Звено АD совершает плоское движение, мгновенный центр скоростей этого звена лежит в точке Р пересечения перпендикуляров, проведенных в точках А и D к скоростям VA и VD. VD VC Скорость точки D находим из проА VA D С V DP V = V DP . порции D = . D A AP V A AP ωОА Соединим точек С с мгновенным О1 центром скоростей Р, скорость точки С О2 будет направлена перпендикулярно отрезку СР. Р Модуль этой скорости найдем из Рис.27 CP VC CP = . пропорции , VC = V A VA AP AP V Угловая скорость звена АD равна ω AD = A . AP VD . Угловая скорость кривошипа равна ωO2 D = O2 D Задача 10. Определить скорости точек А, В, С, и угловые скорости звеньев механизма, изображенного на рис. 28, если угловая скорость кривошипа ОА равна ωОА. Решение. Звенья ОА и DB совершают вращательные движения, поэтому V A ⊥ OA , VB ⊥ BD . Скорость точки А равна VA = ωОА· OA. Звено совершает плоское движение, так как скорости точек А и В VВ В параллельны, то мгновенный центр скоростей VC этого звена находится в бесконечности, поэтому С VA скорости всех его точек геометрически равны А VA = VB = VC. ωОА Угловая скорость звена AВ равна нулю. Угловая скорость кривошипа ВD равна О D V ωBD = B . BD Рис.28 16 Задача 11. Определить скорости точек А, В, С, D и угловые скорости звеньев механизма, изображенного на рис. 29, если угловая скорость кривошипа ОА равна ωОА. Р О2 D Решение. Скорость точки А VA А перпендикулярна кривошипу и VD равна VA = ωОА· OA. Звено АВ соVC вершает плоское движение, скоС рость VВ точки В направлена гориωОА зонтально влево. В данном положеVВ О1 В нии мгновенный центр скоростей звена АВ находится в бесконечноРис.29 сти, поэтому скоростей всех его точек геометрически равны: VA = VB = VC. Звено CD совершает плоское движение, мгновенный центр скоростей этого звена лежит в точке Р пересечения перпендикуляров, проведенных к скоростям в точках С и D. Скорость точки D найдем из пропорции DP VC CP = . , VD = VC VD DP CP V Угловая скорость звена СD равна ωCD = C . CP V Угловая скорость кривошипа О2D равна ωO2 D = D . DP Задача 12. Определить скорость точки С и угловую скорость подвижного блока 3 (рис.30), если скорость тела 1 равна V1, r = 0,5R. Решение. Блок 2 вращается вокруг точки О, скорость его точки В по величине равна скорости тела 1, так 2 VB как они связаны нерастяжимой нитью: VB = V1.Скорость точек при 1 rO A вращательном движении пропорB V1 циональны их радиусам вращения, VA R поэтому VD VC D К СP VE 3 V4 4 Рис.30 V A r 0,5R = = = 0,5 . СлеVB R R довательно, VA = 0,5 VB. Подвижный блок 3 совершает плоское движение, при этом VD = VB, VК = VA, так как соответствующие точки связаны нерастяжимыми нитями. Рассмотрим движение блока 3. Мгновенный центр скоростей находится в точке пересечения Р общего 17 перпендикуляра, проведенного к скоростям VD и VК , и прямой, проходящей через концы этих векторов. Конец вектора скорости VС точки С лежит на прямой, соединяющей концы векторов скоростей VD и VК . VК = VA = 0,5VB, VD = VB , тогда VК = 0,5VD. Составим пропорцию: VK KP = . VD DP Обозначив СР = х, тогда KP = R - x, DP = R + x. Подставив эти значения в пропорцию, получим 0,5 VD R − x R = , откуда x = . VD R+x 3 Тогда расстояние точки К до мгновенного центра скоростей Р равно KP = R – x = 2/3 R, т.е. расстояние точки С до мгновенного центра скоростей в два раза меньше, чем то же расстояние до точки К, поэтому скорость точки будет в два раза меньше скорости точки К. VC = 0,5· VK = 0,5 VA = 0,25 V1. V V 0,25V1 3 = 0,75 1 . Угловая скорость блока 3 равна ω3 = C = CP R R Скорость груза 4, подвешенного на нити в точке С, равна скорости точки С. V4 = VC = 0,25 V1. Задача 13. Определить скорость точки С и угловую скорость кривошипа ОС указанного на рис.31 механизма, если скорость тела 1 равна V1 (радиусы тел 3 и 5 заданы). 2 1 V1 VK VA Решение. Данный механизм состоит из пяти, соединенных между собой тел. O 4 1. Тело 1, двигаясь вниз по наклонной плоскости, сообщает телу 3 3 вращательное движение вокруг точки О. В свою очередь тело 3, находясь Рис.31 в зацеплении с телом 5, сообщает ему плоское движение. Точка С тела 5 приводит в движение кривошип ОС, который вращается вокруг точки О. 2. Рассмотрим движение тела 3 (рис.31а). Скорость точки А равна скорости груза 1, так как они связаны нерастяжимой нитью. Определим скорость точки К. Скорости точек вращающегося тела относятся как их радиусы вращения: VA r = . VK R C 5 K A O 3 Рис. 31 а 5 18 Отсюда скорость 2 VC VK O P C K 3 VC C 5 3 Рис. 31 в R R = V1 . r r 3. Рассмотрим движение тела 5 (рис.31 б). Точка Р является мгновенным центром скоростей, так как в этой точке тело 5 находится в зацеплении с неподвижной шестерней 2. Скорость точки находим из пропорции VC CP = , VK KP CP r3 VK V1 R = = = VC = VK . KP 2r3 2 2r Рис. 31 б O 5 VK = V A 4 4. Кривошип вращается (рис.31в) вокруг точки О с угловой скоростью, которую определим по формуV ωOC = C . ле OC Задача 14. Кривошип ОС соединяющий центры трех шестерен одинакового радиуса R (рис.32), вращается вокруг точки О с угловой скоростью ω. Шестерня 1 закреплена неподвижно, VС шестерни 2 и 3 приводятся в движение D кривошипом. Определить скорости точек контакта между шестернями, скорость VA С точки D и угловые скорости подвижных 3 шестерен. ω А Решение. О 2 1. Рассмотрим движение кривошипа. 1 Скорости точек А и С (рис.32) направлены перпендикулярно кривошипу ОС и равны Рис.32 VA = ω·OA = 2 ω R, VC = ω·OC = 4 ω R. 2. Рассмотрим движение шестерни 2. Шестерня 2 совершает плоское движение, (рис.32 а) скорость точки А известна. В точке контакта с неподвижной шестерней 1 находится мгновенный центр скоростей Р. 19 VС VК D VA А О VD С К Скорость VK направлена перпендикулярно отрезку КР, модуль ее определяется из пропорции VK KP 2 R = = = 2, V A AP R откуда VK = 2 VA = 4ω R. Р Угловая скорость шестерни 2 равна ω2 = V A 2ω R = = 2ω . AP R Рис.32 а 3. Определим характер движения шестерни 3. Скорости точек С и D шестерни 3 равны по модулю и параллельны, следовательно, шестерня 3 совершает поступательное движение, угловая скорость такого движения равна нулю. Упражнения. Определить с помощью мгновенного центра скоростей скорости точек А, В и С в механизмах, представленных на чертежах А В А C 300 30 ωОА 0 300 C В В VВ Рис.1 О 300 О 300 Рис.2 А Рис. 3 В C A O ωОА ωОА A C O 45 0 450 300 В Рис.5 Рис.4 B А C В 600 O ωОА 450 A О 20 Рис.6 А Рис.7 A A ωОА С O 300 600 O 300 O 300 C B O В В Рис.8 ωОА ωОА C Рис.9 A C B Рис.710 O ωОА A C Рис.11 300 Рис.12 В Ускорения точек плоской фигуры. Движение плоской фигуры в своей плоскости можно разложить на поступательное движение вместе с произвольно выбранной точкой, принимаемой за полюс, и вращательное движение вокруг этого полюса. Следовательно, ускорение любой точки при плоском движении равно геометрической сумме двух ускорений: ускорения выбранного полюса, и ускорения, полученного данной точкой при ее вращательном движении вокруг полюса. Пусть известно ускорение точки А плоской aA фигуры, тогда ускорение другой точки этой aB фигуры будет равно (рис.33). a B = a A + a BA , где ускорение вращательного движения точки А вокруг точки В раскладывается на нормальное и касательное ускорения: A aA n a BA a BA τ a BA B τ n a BA = a BA + a BA . Рис.33 Касательное ускорение вращательного движения точки вокруг полюса направлено перпендикулярно отрезку АВ, соединяющему точку В с полюсом А, и равно 21 aτBA = ε BA. Нормальное ускорение направлено по отрезку ВА к полюсу А и равно n a BA = ω 2 BA. Окончательно, полное ускорение точки В равно геометрической сумме трех ускорений: ускорения выбранного полюса А, нормального и касательного ускорений вращательного движения точки В вокруг этого полюса: τ n a B = a A + a BA + a BA . Мгновенным центром ускорений называется точка, принадлежащая связанной с плоской фигурой плоскости, ускорение которой в данный момент равно нулю. Если за полюс выбрать мгновенный центр ускорений, то ускорение произвольной точки плоской фигуры определяется как ускорение вращательного движения вокруг мгновенного центра ускорений (рис.34). τ n a A = a AL = a AL + a AL , n где L –мгновенный центр ускорений, a AL τ нормальное ускорение, a AL - касательное ускорение точки А вращательного движения плоской фигуры вокруг мгновенного центра ускорений. τ А a AL n a AL ε L aA a nAL = ω 2 AL, aτAL = ε AL. n Ускорение a AL - направлено по AL , ускоτ рение a AL - перпендикулярно AL. Ускорение Рис.34 a A точки А образует угол α с отрезком AL со- единяющим точку А с мгновенным центром ускорений и равно (рис.35) a A = ( a nAL ) 2 + ( aτAL ) 2 = AL ω 4 + ε 2 , ε aτAL tgα = n = 2 . a AL ω Таким образом, если известно ускорение точки А плоской фигуры, то, чтобы найти положение мгновенного центра ускорений, следует это ускорение повернуть вокруг точки А на угол α в сторону вращения фигуры и на полученной прямой отложить расстояние L А ε aВA ε aB Рис. 35 22 AL = aA . ω4 + ε 2 Если известны направления ускорений двух точек плоской фигуры, то мгновенный центр ускорений определяется как точка пересечения полученных поворотом этих ускорений на один и тот же угол α = arctq ε в сторону ω2 вращения. Задача1. Центр колеса, катящегося без скольжения по горизонтальной плоскости, в данный момент имеет скорость VC = 2 м/c и ускорение аC = 1,6 м/c. Радиус колеса R = 0,4 м. Определить точек В и Р (рис. 36). Решение. Так как скорость и ускорение точки С известны, то принимаем точку С за полюс. τ n a B = aC + a BC + a BC Тогда aC В aC С τ n a P = aC + aPC + aPC , VC n a PC τ aPC n a BC Р Рис. 36 aC где n n a BC = ω 2 BC = ω 2 R, a PC = ω 2 PC = ω 2 R, a τBC = ε BC = ε R, a τPC = ε BC = ε R. Мгновенный центр скоростей колеса находится в точке Р – точке касания колеса с неподвижной плоскостью, поэтому VC = ω CP = ω R, откуда ω = 2 VC = 5 (1 / c ). , при t = 1c, ω = ω = 0,4 R Угловое ускорение колеса ε= 1,6 dω 1 dVC aC = 4 (1 / c 2 ) = = , при t =1 c, ε = 0,4 dt R dt R Тогда aτBC = ε R = aC a R = aC , a τPC = ε R = C R = aC . R R Ускорение точки Р будет направлено к центру колеса точке С и равно n a P = a BC = ω 2 R = 52 0,4 = 10 ( м / c 2 ) . Для определения ускорения в точке В спроектируем векторное равенство n τ a B = aC + a BC + a BC на горизонтальную ось x и вертикальную ось у: 23 n a Bx = aC − a BC = aC − ω 2 R = 1,6 − 52 0,4 = −8,4 ( м / с 2 ) a By = − a τDC = − aC = −1,6 ( м / c 2 ) 2 2 a B = a Bx + a By = ( −8,4) 2 + ( −1,6) 2 ≈ 8,55 ( м / c ). Задача 2. Колесо радиуса R = 0,4 м катится без скольжения так, что центр колеса имеет постоянную скорость VC =2 м/c. Определить ускорения точек Р и М обода колеса(рис.37) Решение. Так как скорость центра колеса является постоянной, то его ускорение aC = 0 , следовательно, точка С будет мгновенным центром ускорений. Мгновенный центр скоростей находится в aMτ VM точке Р – точке контакта с неподвижной плоскоM стью. Значит V V ω = C = C = const. a M CP R aMn C VC Отсюда следует, ε aP что ε = ω& = 0, tgα = 2 = 0, α = 0. ω Следовательно, ускорения всех точек колеса будут направлены к центру колеса и равны Рис.37 VC2 2 2 . a M = ω CM = ω R = R Ускорение точки М, находящейся на ободе колеса, являясь полным ускорением криволинейного движения, раскладывается на касательное, направленное по скорости в этой точке, и нормальное ускорение, направленное по перпендикуляру к скорости, т.е. по прямой, соединяющей точку М с мгновенным центром скоростей. (рис.37.). a M = a Mn + a Mτ ; a Mn = a M cos α , a τM = a M sin α . Задача 3. Определить скорости точек А, В, С и ускорения точек А и В кривошипно-шатунного механизма (рис.38), если кривошип вращается с постоянной угловой скоростью ωОА = 2 y 1/с, ОА = АВ = 0,6 м, МВ = 0,3 м, ϕ А =300. C О ϕ ϕ Рис.38 В x Решение. Скорость точки А (рис. 39) перпендикулярна кривошипу ОА и равна V A = ω OA OA =1,2 м/c. 24 Звено АВ совершает плоское движение/ Скорость точки В направлена горизонтально, что обусловлено направляющими, вдоль которых движется ползун В. Для определения скоростей точек А и В, принадлежащих шатуну АВ, определим положение мгновенного центра скоростей этого звена. Проведем перпендикуляры к скоростям в P точках А и В, мгновенный центр скоростей Р находится в точке их VA y пересечения. A Скорости точек при плоском VC C движении пропорциональны расстояниями до мгновенного центра x 300 300 О В скоростей. V B Рис.39 V B AP . В треугольнике АВР: = V A BP АР = ВР, следовательно, VB=VA=1,2 м/с. Скорость VC точки С направлена перпендикулярно отрезку СР, соединяющему точку С с мгновенным скоростей. Значение скорости VC находим из пропорции: VC CP = . Из треугольника АСР: СР =AP sin 60. V A AP Следовательно, VC= VA sin 600 = 1,03 м/с. Угловая скорость шатуна равна ω AB = y a An О V A 1,2 = = 2 м/c. AP 0,6 А n а ВА 300 Рис.40 aB τ a BA В x Ускорение точки А представляет собой нормальное ускорение а Аn , направленное по кривошипу (рис. 40) 2 a An = ω OA OA =2,4 м/c. Ускорение точки В направлено по оси х и определяется векторным равенством: τ n a B = a An + a BA = a An + a BA + a BA , (а) n τ a BA и aBA представляют собой составляющие ускорения враn щательного движения звена АВ вокруг точки А. Вектор a BA направлен по где векторы радиусу вращения ВА , ускорение τ aBA - перпендикулярно АВ. 25 Нормальное ускорение n 2 a BA = ω AB AB =2,4 м/с. Таким образом, в уравнении (а) неизвестными являются ускорения aB и τ aBA . Для их определения спроектируем равенство (а) на оси х и у. 0 0 τ 0 n n На ось х: − a B = − a A cos 30 − a BA cos 30 + a BA sin 30 . (б) n 0 = −a An sin 30 0 + a BA sin 30 0 + a τBA cos 30 0 . На ось у: (в) τ n 0 n 0 Из уравнения (в) находим aBA = a A tg 30 − aBA tg 30 =0. Угловое ускорение шатуна равно нулю. Из уравнения (б) получаем aB =2,06 м/с. Определим ускорение точки С (рис.41 ). n τ a C = a An + a CA = a An + a CA + a CA а Аn О 300 (г) А n аCx аCА аC n а ВА а Cy В x Рис.41 Касательное ускорение τ aCA =0 n 2 2 2 Нормальное ускорение aCA = ω AC = 2 0,6 = 1,2 ( м / c ). Находим проекции уравнения (г)на оси Ох и Оу: n aCx = −a nA cos 300 − aCA cos 300 = −1,82 ( м / c 2 ). n aC y = − a An sin 30 2 + aCA sin 300 = −2,4 ⋅ 0,5 + 1,2 ⋅ 0,5 = −0,6( м / c 2 ). Ускорение точки С равно 2 2 aC = aCx + aCy = (1,82) 2 + ( −0,6) 2 = 1,91 ( м / c 2 ) 26 Контрольрые вопросы 1. Определение плоскопараллельного движения. 2. Уравнения движения плоской фигуры. 3. Определение скоростей точек плоской фигуры. 4. Теорема Жуковского. 5. Мгновенный центр скоростей. Свойства м.ц.с. 6. Способы нахождения мгновенного центра скоростей. 7. Решение задач с помощью мгновенного центра скоростей. 8. Ускорения точек плоской фигуры. Библиографический список 1. Бутенин Н.В и др. Курс теоретической механики. Лань, 2002.- 736 стр. 2. Тарг С.М. Краткий курс теоретической механики. Высшая школа, 2004. – 416 стр. 3. Яблонский А.А., Никифорова В.М. Курс теоретической механики. Интеграл-Пресс, 2004. – 608 стр. 4. Яблонский А.А. Сборник заданий для курсовых работ по теоретической механике. Интеграл-Пресс, 2004. – 384 стр. 27