Построение скоростного распределения
реклама

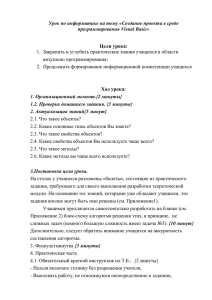
Строительные науки УДК 625.12 Пупатенко В. В., Пупатенко И. В., Тенирядко Н. И. Построение скоростного распределения при сейсмотомографическом обследовании железнодорожного земляного полотна В статье рассмотрена задача восстановления распределения скоростей продольных и поперечных звуковых волн в теле насыпи на основе данных, полученных методом сейсмической томографии. Проведен анализ возможных способов решения, предложен и описан алгоритм решения поставленной задачи, базирующийся на адаптированном методе Мозера и алгоритме Берримана. Также приведены результаты тестирования программной реализации предложенного алгоритма на теоретической модели, а также на модельных примерах. Ключевые слова: сейсмическая томография, нелинейная обратная задача, железнодорожное земляное полотно, скоростное распределение. PUPATENKO V. V., PUPATENKO V. V., TENIRYDKO N. I. VELOCITY CONDITIONS ESTIMATION BASED ON RAILWAY EMBANKMENT SEISMIC TOMOGRAPHY The problem of subgrade sound wave velocity conditions estimation based on seismic tomography data is studied in this article. Possible solutions of this task are analyzed; algorithm that is based on adopted T. J. Moser’s method and J. G. Berryman’s algorithm and can be used to solve this problem is proposed and described in a great detail. The implementation of this algorithm is tested on math model and several examples; test results are described in the article. Keywords: seismic tomography, nonlinear inverse problem, railway embankment, velocity conditions. Пупатенко Виктор Викторович канд. техн. наук, Дальневосточный государственный университет путей сообщения, г. Хабаровск Пупатенко Илья Викторович магистрант Новосибирского государственного университета Тенирядко Надежда Ивановна канд. техн. наук, доц. Московского государственного университета путей сообщения, г. Москва E-mail:[email protected] 80 М етоды диагностики земляного полотна основаны на изучении закономерностей изменения физических полей, параметры которых связаны с физико-механическими свойствами грунтов земляного полотна и его основания. Физическое поле может быть как искусственно созданным (в сейсмических методах, электроразведке, георадиолокации), так и природным (в методе вибрационной диагностики). Современная аппаратура для сейсмической томографии позволяет регистрировать времена первых вступлений сейсмических волн с высокой точностью (дискретизация до 0,05 мс для 16-канальной аппаратуры), таким образом, интенсивное развитие аппаратных средств диагностики определяет необходимость разработки методов обработки и интерпретации полученной при обследовании информации. Исходной информацией для построения скоростного разреза являются геометрия земляного полотна, координаты характерных точек которого задаются набором пар (xi, yi), координаты точек источников возбуждения колебаний (набор пар (xsi, ysi)), координаты точек установки датчиков для регистрации колебаний (набор пар (xri, yri)). В результате натурных измерений получены времена первых вступлений tkl (время, прошедшее с момента возбуждения ударной волны в k-й точке до ее регистрации l-м датчиком). Кроме того, как правило, доступна дополнительная информация о конкретном объекте земляного полотна. При обработке исходной информации основной задачей является получение распределения скоростей распространения продольных и поперечных волн в теле насыпи. На основе скоростного распределения по известным корреляционным зависимостям определяют необходимые характеристики грунтов. Таким образом, задача построения скоростного распределения сводится к определению функции скорости распространения волн в каждой точке насыпи v (x, y). С практической точки зрения более удобно рассматривать не скорость распространения волны, а замедление, т. е. функцию В настоящее время не известны методы получения точного аналитического выражения функции v (и, соответственно, c) поэтому имеет смысл искать какое-либо ее приближение. Для решения поставленной задачи была выбрана модель земляного полотна, состоящего АКАДЕМИЧЕСКИЙ ВЕСТНИК УРАЛНИИПРОЕКТ РААСН 1 | 2011 из элементов (ячеек) с постоянным значением скорости, которая позволяет использовать наиболее простые алгоритмы для решения и наименее требовательна к вычислительным ресурсам. Решение задачи нахождения значения скоростей в ячейках по информации о временах хода лучей может быть основано на одном из двух предположений относительно задачи [1]: • Лучи всегда распространяются по фиксированной траектории вне зависимости от скоростного распределения; • Лучи распространяются по траектории (зависящей от скоростного распределения), которая минимизирует время хода. Первое предположение (линейное приближение) применимо для некоторых обратных задач и позволяет использовать достаточно простой алгоритм решения. В этом случае можно легко вычислить длину Mij пути i-го луча через j-ю клетку, из величин Mij можно составить матрицу M, из неизвестных значений обратной скорости sj – вектор s, из данных времен хода j-х лучей вектор t. Тогда для решения задачи просто необходимо решить матричное уравнение Ms = t , вернее, найти такое s, при котором норма (длина вектора) ||Ms – t|| минимальна. К сожалению, линейное приближение применимо не всегда. Численный эксперимент (на основе реализации модифицированного алгоритма ART [6]), показал, что в задаче малоглубинной сейсмотомографии линейное приближение неприменимо из-за низкой точности результата. При принятии второго предположения для решения прямых задач расчета траекторий лучей, при известном скоростном распределении, можно использовать несколько различных методов: алгоритм «стрельбы» (shooting method), метод изгиба (bending method), методы на основе разностных схем (full wave equation; Vidale method), а также методы на основе теории графов (метод Т. Мозера (T. Moser)) [1, 4, 5]. С учетом сформулированных требований был выбран и адаптирован к задаче алгоритм Т. Мозера [4]. Этот метод основывается на принципе Ферма, разработан для моделей ячеек с постоянной скоростью и позволяет достаточно быстро посчитать разумное приближение (однако его точность меньше, чем точность, например, алгоритмов «стрельбы»). Основная идея метода Мозера заключается в том, что кратчайшая тра- ектория между любыми двумя точками в одной ячейке с постоянной скоростью – отрезок, соединяющий эти точки. Согласно методу, строится граф, вершины, «лежащие» в одной ячейке, соединяются ребрами (вес которых полагается равным времени хода между соответствующими вершинами), а затем по нему проводится поиск кратчайшего пути от вершины источника до вершины приемника. Этот путь и считается траекторией луча. Если алгоритм решения прямой задачи выбран, то существует способ определить матрицу M на основе известного приближения вектора s. Тогда задачу поиска скоростного распределения можно рассматривать как оптимизационную задачу: необходимо найти такой вектор s, чтобы минимизировать функцию ошибки , при условии, что M – решение прямой задачи для вектора s. Из известных методов был выбран алгоритм глобальной оптимизации Дж. Берримана (J. G. Berryman). Алгоритм является детерминированным, стабильным, а также теоретически сходится к глобальному минимуму [2]. Его общая структура имеет следующий вид: 1. Для текущего приближения функции s0 решается прямая задача и определяется матрица M; 2. Определяется значение функции ошибки (методом наименьших квадратов), ее значение сравнивается с заданной малой константой: ; 3. Рассчитывается следующее приближение s1 на основе алгоритма выбора следующего приближения; 4. Выполняется переход на шаг 1, при этом s0 заменяется на s1. На первом шаге алгоритма применяется алгоритм трассировки лучей, на третьем – алгоритм Берримана для подбора следующего приближения на основе матрицы M и текущего приближения. При решении прямой задачи траектория хода луча от источника к приемнику приближается кратчайшим путем в некотором специальным образом построенном графе. Т. Мозер [4] указывает общую идею построения такого графа, что позволяет адаптировать алгоритм для решения задачи малоглубинной сейсмотомографии при известных координатах источников и приемников, геометрии земляного полотна, а также заданном размере ячейки сетки: 1. Каждому источнику, приемнику и характерной точке профиля сопос- АКАДЕМИЧЕСКИЙ ВЕСТНИК УРАЛНИИПРОЕКТ РААСН 1 | 2011 тавляется вершина, которая добавляется в граф. 2. Каждое ребро каждой клетки разбивается N точками на N+1 равный отрезок. Если эти точки лежат внутри тела насыпи – им сопоставляется вершина, которая добавляется в граф. 3. В граф добавляются вершины, соответствующие точкам пересечения ребер ячеек и профиля насыпи. 4. Ребрами соединяются все вершины графа, которым соответствуют точки (рис. 1), лежащие в одной и той же ячейке (кроме случаев, когда отрезок, соединяющий две такие точки, лежит не целиком внутри тела насыпи). Каждому ребру построенного неориентированного графа сопоставляется «вес» – расстояние между точками, которые соответствуют вершинам, образующим это ребро, умноженное на значение замедления данной ячейки, т. е. минимальное время хода между вершинами, его образующими. С использованием алгоритма Дейкстры выполняется поиск кратчайшего пути в графе (луча с минимальным временем хода). Алгоритм выбора следующего приближения определяет значение вектора s на следующей итерации алгоритма решения обратной задачи. Необходимо заметить, что сходимость всего алгоритма значительно зависит от способа выбора следующего приближения. Для решения задачи определения следующего приближения был выбран алгоритм, предложенный Дж. Берриманом [1, 2]. Данный алгоритм (в сочетании с алгоритмом трассировки лучей) является стабильным итерационным алгоритмом глобальной оптимизации. Основная идея этого алгоритма заключается в следующем: все возможные модели (пары «скоростное распределение – заданная траектория лучей») предлагается разбить на два класса. Допустимыми моделями будем Рисунок 1. Часть графа, создаваемого алгоритмом трассировки лучей. Жирной линией обозначен отрезок ломаной профиля насыпи (сама насыпь ниже этого отрезка), кругами обозначены вершины графа, а тонкими линиями – ребра 81 Строительные науки а) симых вектора s1 и s2 ; обе задачи получены модифицированным методом гребневой регрессии [2]. Первая подзадача заключается в том, чтобы найти , дающий наименьшую ошибку (т. е. минимальную норму ||Ms – t|| ). Дж. Берриман приводит следующее решение этой задачи: Вторая подзадача в минимизации следующего выражения (где μ – некоторый параметр): б) Заключение Автором алгоритма доказано, что минимум достигается на следующем векторе: s1=s1+(MTT-1M + μMD)-1MTT-1(t–Ms1) в) Рисунок 2. Результаты решения модельной задачи: а) заданное распределение скоростей; б) восстановленное скоростное распределение; в) траектории лучей называть те, у которых время хода по каждому из лучей не меньше измеренного. Все остальные модели будем называть недопустимыми. Недопустимые модели в свою очередь можно разбить на классы в зависимости от числа нарушений (т. е. количества лучей, время хода которых в данной модели меньше измеренного). Алгоритм начинает работу с некоторой недопустимой модели и на каждой итерации получает множество векторов s (а при помощи алгоритма решения прямой задачи можно получить и соответствующие этим скоростным распределениям кратчайшие траектории распространения лучей). Из этого множества моделей следующим приближением выбирается та модель, у которой число нарушений минимально. Процесс продолжается до тех пор, пока не будет найдено точное решение, либо не будет выполнен один из критериев останова. Чтобы подробнее описать шаги, из которых состоит алгоритм Берримана, необходимо сформулировать две подзадачи, решаемые на каждом шаге этим алгоритмом. Пусть so – текущее приближение, матрица M (размера m × n ) получена при решении прямой задачи; обозначим , а . Определим диагональные матрицы T и D следующим образом: , . Теперь рассмотрим две подзадачи. Их цель – найти два линейно незави- 82 рост (Leidenfrost) [3] показал, что если скоростное распределение задается формулой , то время хода от точки (x, 0) до произвольной точки может быть определено аналитически. Полученная при тестировании относительная ошибка вычислений времен хода (соответствует времени первого вступления в реальных экспериментах) составила от 0,1 % до 0,01 %. В качестве модельного примера была выбрана грунтовая среда (рис. 2) с условными значениями обратных скоростей в ячейке. Необходимо заметить, что существует также итерационная схема, позволяющая определить вектор s2 в тех случаях, когда вычисление по явной формуле по некоторым причинам невозможно. По двум полученным линейно независимым векторам s1 и s2 строится семейство их линейных комбинаций , из которого и выбирается следующее приближение. Таким образом, схема алгоритма Берримана выглядит следующим образом: 1. Пусть s0 – текущее приближение скоростного распределения в насыпи, матрица M получена при решении прямой задачи. 2. Решением первой подзадачи определяется значение γ и вектор s1. 3. Решение второй подзадачи дает вектор s2. 4. Рассчитывается такое , что имеет наименьшее число нарушений из всего семейства векторов . Найденный вектор и будет следующим приближением. Алгоритм решения обратной задачи завершает свою работу, если найдено точное решение, либо периметр треугольника, составленного из точек s1, s2 и s3, станет меньше некоторой заранее определенной константы (здесь s3 – проекция sα на границу области допустимых моделей). Также можно производить остановку алгоритма, если число итераций превысило некоторое максимальное значение. Работоспособность алгоритма трассировки лучей проверена на математической модели, для которой существует аналитическое выражение времени хода между двумя точками. Лейденф- Таким образом, ранее разработанная методика получения предварительного скоростного распределения, содержащая ряд упрощений и допущение о прямолинейности распространения лучей заменена готовым к применению решением, учитывающим искривление траектории каждого луча в зависимости от скоростных характеристик грунтов, слагающих реальное земляное полотно. Программная реализация алгоритма может применяться в полевых условиях при выполнении работ по сейсмотомографическому обследованию железнодорожного земляного полотна. Список использованной литературы 1 Berryman J. G. Lecture notes on nonlinear invesion and tomography: borehole seismic tomography // Earth Resources Laboratory. Massachusetts Institute of Technology, 1991. 2 Berryman J. G. Stable iterative reconstruction algorithm for nonlinear traveltime tomography // Inverse problems. 1990. Vol. 6. № 1. UK: Institute of Physics and IOP Publishing Limited. 3 Leidenfrost et al. Comparison of six different methods for calculating traveltimes // Geophysical Prospecting. 1999. Vol. 47. Issue 3. Р. 269–297. 4 Moser T. J. Shortest path calculation of seismic rays // Geophysics-1991. Vol. 6. № 1. Р. 59–67. 5 Papazachos C. B., Nolet G. Non-linear arrival time tomography // Annali di geofisica. 1997. Vol. XL. No. 1. Р. 85–97. 6 Strohmer T., Vershynin R. A randomized Kaczmarz algorithm for linear systems with exponential convergence // Journal of Fourier Analysis and Applications. 2009. Vol. 15. Р. 262–278. АКАДЕМИЧЕСКИЙ ВЕСТНИК УРАЛНИИПРОЕКТ РААСН 1 | 2011