идентификация параметров кинематических моделей
реклама

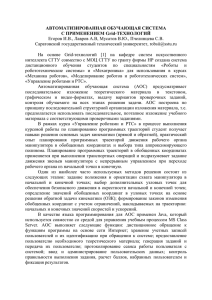
3069 УДК 681.5.015 ИДЕНТИФИКАЦИЯ ПАРАМЕТРОВ КИНЕМАТИЧЕСКИХ МОДЕЛЕЙ МАНИПУЛЯЦИОННЫХ РОБОТОВ С.Л. Крутиков МГТУ им. Н.Э. Баумана Россия, 105005, г. Москва, ул. 2-я Бауманская, 5 E-mail: [email protected] Ключевые слова: параметры Денавита-Хартенберга, калибровка манипуляционных роботов, идентификация кинематических моделей Аннотация: Кинематическая калибровка роботов-манипуляторов необходима для повышения точности воспроизведения ими желаемых траекторий движения. В данной работе рассматриваются известные методы решения этой задачи, а также вводится понятие обобщенных кинематических параметров, на основе которого строится альтернативный подход к идентификации параметров кинематических моделей манипуляционных систем, приводится пример использования предлагаемого метода. 1. Введение Кинематические модели управляемых систем абсолютно твердых тел являются фундаментом их математического описания, поскольку указывают взаимозависимость между движением каждого из элементов системы и управляемыми степенями свободы. В основе построения таких моделей обычно лежит связывание с каждым телом подвижной системы координат и определение их относительного положения с помощью преобразований движения евклидова пространства, зависящих от конструктивных параметров и обобщенных координат системы. Роботы-манипуляторы образуют особый класс систем твердых тел, поскольку их звенья связаны между собой шарнирами 5-го класса, допускающими лишь одну степень свободы относительного движения, и образуют последовательную кинематическую цепь без ветвлений. Для такого рода механизмов существует специальная методика построения подвижных систем координат звеньев, предложенная Денавитом и Хартенбергом [1]. При ее использовании преобразование движения, определяющее положение системы координат некоторого звена относительно системы координат предыдущего звена, задается тремя постоянными параметрами и одной обобщенной координатой. Рассматривая манипулятор с точки зрения выполнения им технологических операций, можно сказать, что наибольший интерес представляет положение его последнего звена, на котором установлена рабочая оснастка, например, захватное устройство или инструмент. Положение системы координат этого звена, связываемой обычно с некоторой характерной точкой оснастки, относительно «мировой» системы координат роXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3070 бота, связанной, как правило, с неподвижным основанием, можно определить путем последовательного сложения преобразований для каждого звена, начиная с основания манипулятора. Таким образом, положение системы координат рабочего органа n-звенного манипулятора определяется n обобщенными координатами и 3n постоянными параметрами. Ясно, что скорости и ускорения инструмента будут зависеть от обобщенных координат, их производных по времени соответствующего порядка и тех же постоянных параметров Денавита-Хартенберга. Значения кинематических параметров, как правило, можно найти на основе конструкторской или пользовательской документации. Однако эти значения являются номинальными и будут отличаться от параметров реального механизма вследствие неизбежных погрешностей его изготовления. Поэтому при производстве современных высокоточных роботов-манипуляторов предусмотрен этап калибровки системы управления, во время которого экспериментально определяются отклонения кинематических параметров конкретного механизма от их номинальных значений. Кроме того, возможны ситуации, в условиях которых идентификацию параметров кинематической модели необходимо выполнять в режиме реального времени, поскольку их более нельзя считать неизменными. Подобная задача может возникнуть в прецизионном машиностроении, когда требования к точности позиционирования инструмента столь высоки, что начинают играть роль даже малые изменения с течением времени кинематических параметров. Например, по данным фирмы Broetje Automation, выпускающей роботизированные производственные ячейки для авиастроения, ошибка позиционирования инструмента в соответствии с требованиями фирмы Airbus должна находится в пределах 0,15 мм. В этом случае начинают сказываться такие факторы как температурная деформация звеньев, упругость механических передач и т.п. Таким образом, идентификация кинематических параметров роботов-манипулятора является необходимым условием обеспечения высокой точности воспроизведения заданных движений. В данной работе представлен краткий обзор существующих методов параметрической идентификации кинематической модели манипуляционных систем, и предложен альтернативный подход, основанный на представлении упомянутой модели с помощью т.н. обобщенных кинематических параметров. Рассмотрен пример использования предложенного метода для трехзвенного манипулятора, повторяющего кинематическую схему первых трех звеньев робота PUMA 560. 2. Классическая кинематическая модель манипулятора Математически модель кинематики n-звенного манипуляционного механизма может быть выражена следующим образом. Преобразование движения, определяющее переход от системы координат (k − 1)-го звена к системе координат k-го звена (k = 1, n), с помощью однородных координат представляется в виде матрицы Ak , имеющей вид [1]: cos (θk ) −sin (θk ) cos (αk ) sin (θk ) sin (αk ) ak cos (θk ) sin (θk ) cos (θk ) cos (αk ) −cos (θk ) sin (αk ) ak sin (θk ) Ak = 0 sin (αk ) cos (αk ) dk 0 0 0 1 XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3071 В качестве обобщенной координаты qk выбирается параметр θk , если k-е сочленение вращательное, и параметр dk — если поступательное. Остальные параметры матрицы Ak являются постоянными и определяются особенностями конструкции конкретного робота. Матрица перехода Tn , определяющая положение системы координат инструмента относительно «мировой» системы координат манипулятора, вычисляется как произведение матриц перехода для каждого сочленения: Tn = A1 . . . An . (1) Нетрудно видеть, что Tn = Tn (q, p), где q ∈ Rn — вектор обобщенных координат манипулятора, p ∈ R3n — вектор кинематических параметров, составленный из всех постоянных параметров Денавита-Хартенберга рассматриваемого робота. Дифференцируя по времени, получаем Ṫn = (2) n X i=1 Ui q̇i , T̈n = n X Ui q̈i + i=1 n X n X Uij q̇i q̇j . i=1 j=1 Здесь Ui (q, p) = ∂Tn /∂qi , Uij (q, p) = ∂ 2 Tn /(∂qi ∂qj ). Производные матрицы перехода Tn определяют скорости и ускорения последнего звена, как видно они также зависят от параметров p Денавита-Хартенберга. Наконец, из структуры матрицы Ak и соотношений (1) и (2) ясно, что в общем случае кинематическая модель манипулятора как в конечной, так и в дифференциальной форме нелинейна относительно параметров. 3. Существующие подходы к идентификации кинематических параметров Как известно, задача параметрической идентификации систем является задачей регрессионного анализа, поскольку сводится к оценке значений параметров некоторой заданной функции, наилучшим образом отвечающих конечному набору соответствующих друг другу значений этой функции и ее аргументов. Наиболее простым и распространенным подходом к решению упомянутой задачи является обычный или взвешенный метод наименьших квадратов (МНК), применение которого к рассматриваемой в данной работе задаче подробно изложено в [2]. Ниже дана краткая характеристика этого метода. Пусть в m моментах времени ti (i = 1, m) измерены значения вектора обобщенных координат манипулятора qi , а также координаты характерной точки инструмента и двух вспомогательных точек, расположенных на последнем звене. Последние нужны, чтобы построить ортонормированный базис, связанный с технологической оснасткой, и заполнить, таким образом, все столбцы матриц Tni , определяющих положение рабочего органа в «мировой» системе координат робота в каждый из моментов времени ti . Тогда задача идентификации кинематических параметров манипулятора с помощью стандартного МНК сводится к поиску вектора p̂ оценок неизвестных параметров, минимизирующего квадратическую ошибку вида m 1X e= tr Tтei Tei → min, p 2 i=1 где Tei = Tn (qi , p) − Tni . XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3072 Однако, как отмечалось выше, кинематическая модель (1) нелинейна по параметрам, поэтому получить аналитическое решение данной оптимизационной задачи невозможно. Для решения подобных задач существует несколько путей: • линеаризация модели по параметрам в окрестности некоторого начального приближения p0 Tei = Tn (qi , p0 ) − Tni + 3n X ∂T n j=1 ∂pj (qi , p0 ) δpj и последовательное применение линейного МНК (метод Гаусса-Ньютона); • использование прямых (например, метод золотого сечения) и градиентных (например, наискорейший спуск, алгоритм Левенберга-Марквардта) методов нелинейной оптимизации; Все перечисленные методы являются итерационными и потому всегда остается открытым вопрос об их сходимости. К сожалению, однозначно указать наиболее предпочтительный среди этих методов не удается. Так, например, методы прямого поиска имеют очень низкую скорость сходимости, но проще остальных в реализации, поскольку не требуют вычисления частных производных (матриц Якоби) по параметрам. Метод Гаусса-Ньютона использует хорошо разработанный аппарат линейного МНК, однако его сходимость сильно зависит от того насколько малыми будут отклонения реальных параметров от номинальных значений. Кроме того, все градиентные методы имеют проблемы со сходимостью в окрестности вырожденных конфигураций манипулятора, в которых соответствующие матрицы Якоби имеют неполный ранг. Алгоритм Левенберга-Марквардта работает и в этом случае, однако требует дополнительных вычислений для разрешения проблемы вырождения матриц Якоби. Наконец, общим недостатком для всех перечисленных методов является сложность применения в режиме реального времени из-за отсутствия рекуррентного алгоритма оценивания, существующего, например, для линейного МНК. Итерационные методы реализуют т.н. «пакетную» идентификацию, ибо им для корректной работы требуются все измерения, накопленные к настоящему моменту. Другой подход к идентификации кинематических параметров заключается в формализации ее как задачи оценивания состояния линейной дискретной стохастической системы xk = xk−1 + wk−1 , x0 = pном , zk = Ck xk + vk−1 , k = 1, . . . , и применении фильтра Калмана. Этот подход также подробно описан в работе [2]. Преимуществом данного метода является рекуррентное получение оценок неизвестных параметров, однако фильтр Калмана применим лишь для линейных систем, поэтому при составлении уравнения измерений необходимо использовать линеаризованную кинематическую модель. Последнее может привести к значительным ошибкам оценки и даже расходимости метода. Помимо методов, основанных на аналитическом выражении кинематической модели манипулятора, существует геометрический подход, заключающийся в определении положений осей сочленений манипулятора и применении методов аналитической геометрии для вычисления параметров Денавита-Хартенберга. Имеются два XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3073 основных способа нахождения положений осей сочленений. Первый [2] заключается в последовательном перемещении звеньев манипулятора, начиная с последнего, относительно предыдущих звеньев с одновременным измерением значений координат характерной точки инструмента в некоторой «мировой» системе координат. Ясно, что траекториями движения этой точки будут окружности или прямые, в зависимости от типа сочленения. Далее, с помощью обычного МНК можно найти оценки параметров уравнений плоскости вращения и окружности в этой плоскости или уравнения прямой в пространстве, и, тем самым, определить положения осей сочленений робота для исходной конфигурации. Другой способ [3] основан на нахождении матрицы Якоби Js для скоростей σk zk−1 ωn . = Js q̇, Js = {jk }k=1,n , jk = σk zk−1 × pk−1,n + (1 − σk )zk−1 vn Здесь zk — орт оси (k + 1)-го сочленения, вектор pk,n соединяет начала систем координат k-го и последнего звена, σk определяет тип сочленения. При геометрическом подходе кинематическая модель не используется, поэтому не возникает проблем, связанных с ее параметрической нелинейностью. Однако применение этого подхода в режиме реального времени затруднительно, поскольку он требует поочередного движения по каждой обобщенной координате. В заключение отметим, что многие проблемы рассмотренных здесь методов связаны с нелинейностью кинематической модели манипулятора по параметрам, поэтому далее предлагается альтернативный способ представления этой модели, свободный от указанного недостатка. Кроме того, отсутствует аналитическое исследование идентифицируемости кинематических параметров, лишь при использовании 4. Обобщенные кинематические параметры Пусть подвижные системы координат звеньев манипулятора построены по методу Денавита-Хартенберга. В этом случае, как показано в работе [4], матрица перехода Ak может быть представлена в виде (3) Ak = mk X Ãlk blk , где blk ∈ Bk , mk = |Bk |, l=1 Bk = {1 (qk ) , cos (qk ) , sin (qk )}, если k-е сочленение является вращательным, и Bk = {1 (qk ) , qk } — если поступательным, наконец, постоянные матрицы Ãlk зависят от параметров Денавита-Хартенберга. Учитывая это представление, матрица перехода Tn может быть записана следующим образом: (4) Tn = m1 X l1 =1 ... mn X T̃ln1 ...ln bl11 . . . blnn , где T̃ln1 ...ln = Ãl11 . . . Ãlnn . ln =1 Функции bln1 ...ln = bl11 . . . blnn , как элементы линейного пространства непрерывных функций обобщенных координат манипулятора, линейно независимы [4]. Тогда из (4) следует, что компоненты матрицы Tn принадлежат конечномерному линейному подпространству Bn этого пространства, задаваемому набором базисных функций bln1 ...ln . XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3074 Соответствующие компоненты матриц T̃ln1 ...ln , являясь коэффициентами базисных разложений (4), полностью и однозначно определяют кинематическую модель манипулятора в конечной форме. Далее будем называть их обобщенными кинематическими параметрами. Нетрудно видеть, что они являются некоторыми, в общем случае нелинейными комбинациями обычных параметров Денавита-Хартенберга. Заметим также, что в целях уменьшения количества обобщенных параметров, из их числа следует исключить элементы последних строк матриц T̃ln1 ...ln . Это связано со структурой матриц однородных преобразований, последняя строка которых в случае преобразования движения является константой и не содержит никакой полезной информации. Кинематическая модель в дифференциальной форме (2) также может быть записана с помощью обобщенных параметров, ибо матрицы Ui и Uij , определяющие эту модель и являющиеся частными производными первого и второго порядка матрицы перехода Tn по обобщенным координатам, представимы в виде (4). Действительно, из структуры базисных функций bln1 ...ln очевидно, что множество этих функций замкнуто относительно операции дифференцирования по любой обобщенной координате. Тогда линейное пространство Bn также замкнуто относительно этой операции, причем координаты любого элемента этого пространства во введенном выше базисе будут теми же обобщенными кинематическими параметрами с точностью до знака и перестановки индекса базисной функции. 5. Идентификация параметров обобщенной кинематической модели Воспользуемся кинематической моделью в обобщенных параметрах. Основным достоинством этой модели с точки зрения идентификация является линейность по параметрам и структурная идентифицируемость всех параметров, что следует из свойств базисного разложения. Представим обобщенную кинематическую модель в форме удобной для применения МНК. Пусть вектор-строка b (q) составлена из всех базисных функций пространства Bn , а векторы-столбцы pjk (j = 1, 3, k = 1, 4) — из соответствующих обобщенных параметров элемента матрицы Tn с индексом (j, k). Размер этих векторов равен размерности пространства Bn : dim (Bn ) = n Y ml = 3ν 2n−ν , l=1 где ν — количество вращательных сочленений манипулятора. Тогда (4) примет вид bpjk = {Tn }jk . Введем матрицу неизвестных параметров P, (4j − 4 + k)-м столбцом которой является вектор pjk , и вектор-строку c (q) зависимых переменных регрессии, (4j −4+k)-м элементом которой является функция {Tn (q)}jk . В результате получаем (5) b (q) P = c (q) . Фактически, представленная регрессионная модель является совокупностью 12 линейных моделей с общим базисом и различными параметрами. Пусть теперь имеются те же измерения, что и при использовании МНК, рассмотренного в параграфе 3.. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3075 Обозначая b (qi ) как bi и c (q) как ci (i = 1, m), с помощью линейного МНК получаем матричное уравнение b1 c1 (6) WP̂ = Y, где W = . . . , Y = . . . , bm cm как совокупность необходимых условий минимума квадратических ошибок оценки el = 1 Wp̂jk − yl 2 , 2 2 yl = (Y1l . . . Yml )т , l = 4(j − 1) + k. После накопления достаточного количества измерений (m > dim (Bn )) можно найти оценку матрицы неизвестных параметров с помощью псевдообращения P̂ = W+ Y, причем W+ = (Wт W)−1 Wт Y, ибо rank (W) = dim (Bn ) в силу линейной независимости элементов вектора-строки b (q). Заметим, что применение обычной, «пакетной» формы линейного МНК неэффективно в вычислительном отношении, особенно с точки зрения идентификации в режиме реального времени, поэтому лучше пользоваться рекуррентной его формой, подробно описанной в [5]. 6. Пример Рассмотрим использование обобщенной кинематической модели в задаче идентификации на примере трехзвенного манипулятора, повторяющего кинематическую схему первых трех звеньев робота PUMA 560. Системы координат звеньев и эталонные значения параметров Денавита-Хартенберга приведены на рис. 1. В пакете Рис. 1. Кинематическая схема трехзвенного манипулятора Scilab была реализована классическая кинематическая модель данного манипулятора, имитирующая процедуру получения матриц Tni по данным измерений положения его последнего звена в процессе движения. Экспериментальные траектории в пространстве обобщенных координат имеют вид qj = sin (jt), j = 1, 3, t ∈ [0, 10] с. В результате проведения кинематического моделирования движения манипулятора по XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3076 этим траекториям были получены все данные, необходимые для составления регрессии. Затем, также с помощью пакета Scilab, были вычислены компоненты линейной системы (6), и найдены оценки обобщенных кинематических параметров как решения этой системы в смысле МНК. Результаты расчетов представлены в таблице 1: первый ее столбец определяет индекс базисной функции, которой соответствует параметр, следующие три столбца содержат значения параметров координат точки O3 , остальные же — значения параметров компонент матрицы поворота системы координат третьего звена. Таблица 1. Оценки обобщенных кинематических параметров трехзвенного манипулятора bl1 l2 l3 111 112 113 121 122 123 131 132 133 211 212 213 221 222 223 231 232 233 311 312 313 321 322 323 331 332 333 p̂11 , мм 0 0 0 0 0 0 0 0 0 0 0 0 431,8 433,6 0 0 0 -433,6 -150,1 0 0 0 0 0 0 0 0 p̂12 , мм 0 0 0 0 0 0 0 0 0 150,1 0 0 0 0 0 0 0 0 0 0 0 431,8 433,6 0 0 0 -433,6 p̂13 , мм 0 0 0 0 0 -433,6 -431,8 -433,6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 p̂21 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 -1 0 0 0 0 0 0 0 0 0 p̂22 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 -1 p̂23 0 0 0 0 0 -1 0 -1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 p̂31 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 -1 0 0 0 0 0 0 0 0 0 0 p̂32 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 -1 0 p̂33 0 0 0 0 -1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 p̂14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 0 0 p̂24 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 p̂34 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 Также были вычислены эталонные значения обобщенных параметров с помощью представления матриц Ak классической кинематической модели в форме (3). Их значения в данной таблице не представлены, поскольку наибольшая ошибка оценки не превышает 10−6 , т.е фактически равна нулю. Это позволяет считать обобщенную кинематическую модель рассматриваемого манипулятора вполне адекватной. В заключение отметим, что на данном этапе исследований первостепенное значение имела XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3077 верификация структуры самой обобщенной модели и теоретической идентифицируемости ее параметров, в связи с чем при моделировании не имитировались шумы измерений. Анализ влияния этого фактора на точность оценивания очень важен, особенно с прикладной точки зрения, и является одним из направлений дальнейшей работы. 7. Заключение В данной работе предложен альтернативный вариант параметризации кинематических моделей роботов-манипуляторов, основанный на рассмотрении компонент матрицы перехода Tn как элементов конечномерного линейного пространства функций Bn . Их координаты в известном базисе указанного пространства названы обобщенными кинематическими параметрами, поскольку полностью и однозначно определяют кинематическую модель и являются некоторыми комбинациями обычных параметров Денавита-Хартенберга. Такой подход обладает определенными преимуществами с точки зрения идентификации по сравнению с существующими методами. Во-первых, линейность модели по параметрам позволяет применять линейный МНК, который предоставляет решение в замкнутой форме минимизирующее квадратическую ошибку оценки, что гарантирует сходимость алгоритма. Кроме того, существует рекуррентная форма линейного МНК, более эффективная в вычислительном отношении, ибо расчет новой оценки выполняется на основе только текущих измерений и предыдущей оценки. Последнее особенно актуально для реализации алгоритма идентификации в режиме реального времени. Во-вторых, гарантируется структурная идентифицируемость параметров, поскольку столбцы матрицы-регрессора линейного МНК порождаются линейно независимыми функциями. Конечно, ситуация, когда закон движения манипулятора в пространстве обобщенных координат таков, что матрица-регрессор все же будет иметь неполный ранг, возможна. В целях уменьшения вероятности подобной ситуации желательно, чтобы обобщенные координаты, как функции времени, были линейно независимы. В любом случае теоретический ранг матрицы-регрессора максимален, что позволяет отслеживать ситуации ее вырождения и предпринимать соответствующие действия. Наконец, данный подход не требует вычисления матриц Якоби или специальных «калибровочных» движений манипулятора. Основным недостатком предложенного подхода является существенное увеличение размерности кинематической модели относительно параметров: количество постоянных параметров Денавита-Хартенберга для любого манипулятора равно 3n, количество же обобщенных параметров в наихудшем случае (все сочленения вращательные) составит 12 · 3n . Фактически размерность регрессионной модели будет несколько меньше — 3n , ибо все векторы неизвестных параметров pij имеют одинаковую матрицу-регрессор. Конечно, это не является серьезной проблемой в свете возможностей современных вычислительных устройств, особенно учитывая наличие рекуррентного алгоритма оценивания. Кроме того, исследовав зависимость обобщенных кинематических параметров от параметров Денавита-Хартенберга, можно обнаружить, что многие из них заведомо равны нулю. Это связано с тем, что матрицы Ãlk являются разреженными. Тогда, анализируя структуру матричных коэффициентов T̃ln1 ...ln , можно существенно понизить порядок модели. Например, для манипулятора, рассмотренного в примере, суммарное количество обобщенных параметров XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3078 уменьшается с 324 до 80. К сожалению, в этом случае объединенная регрессионная модель (5) распадается на 12 отдельных моделей, и становится неясным соотношение размерности исходной обобщенной модели и суммы размерностей редуцированных моделей. В дальнейшем предполагается более детально исследовать проблему редукции кинематической модели в обобщенных параметрах и разработать эффективный в вычислительном отношении алгоритм их идентификации на основе рекуррентной формы линейного МНК. Также дополнительного изучения требует вопрос определения траекторий манипулятора, на которых может происходить вырождение матрицы-регрессора. Другим направлением работы является расширение предложенного метода на случай механизмов с древовидными кинематическими схемами и сочленениями произвольного класса. Список литературы 1. 2. 3. 4. 5. Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами. М.: МГТУ им. Н.Э. Баумана, 2004. 480 с. Mooring B.W., Roth Z.S., Driels M.R. Fundamentals of Manipulator Calibration. New York: Wiley-Interscience, 1991. 330 p. Hollerbach J.M., Wampler C.W. The calibration index and taxonomy of kinematic calibration methods // Int. Journal of Robotics Research. 1996. Vol.15, No. 6. P. 573-591. Крутиков С.Л. Базовые инерционные параметры манипуляционных роботов // Вестник МГТУ им. Н.Э. Баумана. Серия «Приборостроение». 2011. № 1. С. 28-45. Эйкхофф П. Основы идентификации систем управления. М.: Мир, 1975. 685 с. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г