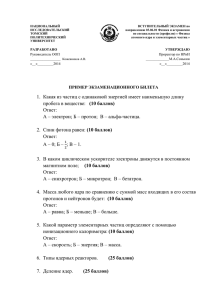
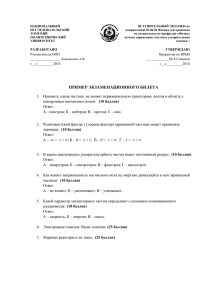
Разработка программы определения размера частиц методом
advertisement

ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ (ГОУ МГИУ) КАФЕДРА «ИНФОРМАЦИОННЫЕ СИСТЕМЫ И ТЕХНОЛОГИИ» ДИПЛОМНАЯ РАБОТА по специальности «Математическое обеспечение и администрирование информационных систем» студента Рогановой Любови Евгеньевны на тему «РАЗРАБОТКА ПРОГРАММЫ ОПРЕДЕЛЕНИЯ РАЗМЕРА ЧАСТИЦ МЕТОДОМ ДИНАМИЧЕСКОГО РАССЕЯНИЯ СВЕТА» Руководитель работы: доцент, к.ф.-м.н. Белова Ирина Михайловна Студент-дипломник ______________ Л.Е. Роганова Руководитель работы, доцент, к.ф.-м.н. ______________ И.М. Белова ДОПУСКАЕТСЯ К ЗАЩИТЕ Зав. кафедрой 36, доцент, к.ф.-м.н. ______________ МОСКВА 2010 Е.А. Роганов Аннотация В дипломной работе представлена разработка программы, позволяющей по результатам эксперимента динамического рассеяния света определить коэффициент диффузии и размер частиц. Для вычислений использован метод нелинейной оптимизации Левенберга-Маркуарта. Диплом содержит 46 страниц, 8 иллюстраций, 3 таблицы и 23 элемента в списке используемой литературы. Ключевые слова: ДИНАМИЧЕСКОЕ РАССЕЯНИЕ СВЕТА, АВТОКОРРЕЛЯЦИОННАЯ ФУНКЦИЯ, КОЭФФИЦИЕНТ ДИФФУЗИИ, РАЗМЕР ЧАСТИЦ, МЕТОД ЛЕВЕНБЕРГА-МАРКУАРТА. 2 Оглавление Аннотация ................................................................................................................ 2 Оглавление ............................................................................................................... 3 Введение................................................................................................................... 4 Глава 1. Принципы динамического рассеяния света........................................... 6 1.1. Броуновское движение................................................................................. 7 1.2. Эффект динамического рассеяния света .................................................... 8 1.3. Общие положения измерения ДРС ............................................................. 9 1.4. От рассеянного света к коэффициенту диффузии................................... 11 1.5. Анализ данных ............................................................................................ 15 1.6. Алгоритмы обработки данных эксперимента ДРС ................................. 17 Глава 2. Постановка задачи.................................................................................. 19 Глава 3. Методы определения размеров частиц при помощи ДРС ................. 20 3.1. Метод моментов.......................................................................................... 20 3.2. Нахождение коэффициента диффузии ..................................................... 24 3.3. Нахождение размера частиц ...................................................................... 26 3.4. Линейная оптимизация данных................................................................. 27 3.5. Нелинейная оптимизация данных............................................................. 29 3.6. Вычисление градиента и матрицы Гаусса ............................................... 33 3.7. Метод Левенберга-Маркуарта................................................................... 34 Глава 4. Программная реализация и обсуждение результатов......................... 38 Выводы. .................................................................................................................. 43 Литература ............................................................................................................. 44 3 Введение В рамках выполнения исследований на химическом факультете и факультете наук и материалов в Московском Государственном Университете им. М.В. Ломоносова проводятся измерения при помощи метода динамического рассеяния света (ДРС). Из-за необходимости их обработки и возникла потребность в решении стоящей перед нами задачи. Целью работы является определение размера сферических частиц по данным корреляционной функции, получаемой из прибора фирмы Malvern. Необходимо разработать информационную систему, которая по экспериментальным данным будет находить нужные параметры зависимости распределения, чтобы затем получить по ним значения коэффициента диффузии и размеры частиц макромолекул. Параметры должны быть подобраны таким образом, чтобы теоретическое распределение максимально приблизилось к экспериментальным данным. По данным прибора можно получить размер частиц, используя метод моментов. Но метод моментов дает очень большую ошибку вычислений. Вычисление моментов третьего и четвертого вообще не имеет смысла, а второго момента (дисперсии) – дает ошибку около 20%. Использование наиболее точного способа обработки данных является важным вопросом. В данной работе было принято решение использовать метод нелинейной оптимизации Левенберга-Маркуарта, позволяющий добиться большой точности и гибкости в определении параметров распределения. Метод динамического рассеяния света – один из наиболее популярных методов для определения размеров макромолекул. Принцип измерения 4 размеров частиц основан на измерении в разные моменты времени интенсивности рассеянного света в объеме, содержащем частицы в растворителе. Благодаря случайному движению частиц, вызванному некомпенсированными толчками молекул растворителя (Броуновское движение), интенсивность света осциллирует относительно своего среднего значения. По частоте этих осцилляций можно получить информацию о коэффициенте диффузии частиц, который, в свою очередь, зависит от размеров частиц. Предполагается, что единственной причиной движения частиц является диффузия, т.е. эффекты седиментации, температурной конвекции и движения жидкости должны быть исключены. Это условие позволяет ограничить сверху размеры частиц, которые могут быть измерены с точностью до нескольких микрон. Ограничение по размерам снизу создает временная шкала измерительного прибора. Обычно рассматриваются частицы с размерами порядка нескольких нанометров. Также существуют ограничения со стороны концентрации частиц (рассмотрение только слабых растворов). При высокой концентрации частиц луч света, рассеянный от одной частицы, может встретить другую частицу до того, как он будет зарегистрирован детектором, и информация потеряется. Это явление, называемое множественным рассеянием. Метод динамического рассеяния света имеет несколько преимуществ: длительность эксперимента невелика, требуются скромные затраты на проведение, возможность анализа данных, содержащих широкий диапазон распределений видов самых различных молекулярных масс. 5 Глава 1. Принципы динамического рассеяния света В соответствии с квазиклассической теорией рассеяния света, когда свет падает на материю, электрическое поле индуцирует осциллирующую поляризацию электронов в молекулах. Затем молекулы рассеивают свет. Угловое распределение, частотный сдвиг, поляризация и интенсивность рассеянного света определяются размером, формой и молекулярными взаимодействиями в рассеивающейся материи. С помощью электродинамики и теории нестационарной статистической механики можно получить информацию о структуре и молекулярной динамике рассеивающей среды с помощью светорассеивающих характеристик системы. В зависимости от временной шкалы флуктуации частиц, для определения динамики частиц в броуновском движении могут быть использованы различные методы. Монохроматор или фильтр (интерферометр или дифракционная решетка) расположен на передней части фотоумножителя и используется, когда временная шкала флуктуаций около микросекунды. Среднее значение постоянного тока на фотоумножителе пропорционально спектральной плотности рассеянного света частоты фильтра. Затем фильтр прокатывается по всем частотам. Немного подробнее об установке. Как уже говорилось ранее, лазер проходит через коллиматор и затем достигает ячейки с раствором. Свет рассеивается и обнаруживается фотоумножителем, который преобразует изменение интенсивности в изменение напряжения. Перед фотоумножителем также находится коллиматор. Использование обоих коллиматоров существенно для эксперимента: первая линза позволяет нам сфокусировать луч света в ячейку, вторая используется для получения суммарного рассеяния света, который будет ни 6 лишком большим, ни недостаточным. Фотоумножитель расположен под углом 90 градусов к рассеивающемуся свету, такой угол позволяет пренебречь нелинейностью ширины угла рассеивающегося света. После фотоумножителя, сигнал немедленно усиливается и затем посылается на компьютер. Для процессов, более быстрых, чем пикосекунда, дифракционные решетки используются как фильтр, а для малых флуктуаций (между пико- и микросекундой) используются интерферометры Фабри-Перо. Для флуктуаций медленнее, чем микросекунда используется метод оптического смешивания. Можно использовать соотношение Стокса-Эйнштейна, и, как следствие, получить формулу, легко определяющую константу диффузии. 1.1. Броуновское движение Коллоидные частицы в суспензии находятся в перманентном движении в соответствии с некомпенсированным взаимодействием молекул растворителя. Тип движения беспорядочный. Это фундаментальное открытие Альберта Эйнштейна [1][2] привело к первому описанию Броуновского движения, ранее утвержденного только экспериментально. Эйнштейн показал, что когда частица перемещается в пространстве, то квадрат перемещения Δr 2 во времени t равен: Δr 2 = 6 Dt t (1.1) Где Dt – коэффициент диффузии. Хотя уравнение (1.1) в общем случае справедливо в трехмерном пространстве, Эйнштейн рассматривал только одномерный случай [2]. Соотношение между коэффициентом диффузии и размером частиц может 7 быть найдено из уравнения баланса сил, между осмотической силой и трением жидкости. Это позволяет получить уравнение Стокса-Эйнштейна, фундаментальное уравнение для определения размера частиц методом ДРС. Dt = k BT 6πηR (1.2) Где k B – константа Больцмана, T – абсолютная температура, η – вязкость среды, R – гидродинамический радиус. 1.2. Эффект динамического рассеяния света Когда световой луч падает на частицы, они взаимодействуют с электромагнитной радиацией и свет рассеивается. Основное предположение теории ДРС заключается в том, что рассеянный свет имеет ту же частоту, что и возбуждающий луч света. Однако, для стороннего наблюдателя возникает оптический эффект Доплера по отношению к движению частиц. Частота рассеянного света Δω смещается малыми сдвигами, пропорциональными скорости частиц v [3]: Δω = s ⋅ v (1.3) Интенсивность рассеянного света не постоянна, но флуктуирует около среднего значения I . На рисунке 1 показаны флуктуации интенсивности рассеянного света в соответствии с тепловым движением рассеянных частиц. На левом рисунке показан график для больших частиц – флуктуации медленные, на правом для маленьких – флуктуации быстрые. 8 Рис.1. Возбуждающий луч имеет огромное количество частиц, движущихся во всех направлениях с различными скоростями. Таким образом, получается непрерывный спектр вероятности частотных сдвигов S (ω) , который имеет центром частоту возбуждающего луча ω0 . На рисунке 2 показан график распределения спектральной плоскости вероятности частотных сдвигов в рассеянном свете с Броуновским движением частиц в суспензии. Рис. 2. 1.3. Общие положения измерения ДРС 9 В типичной установке для проведения эксперимента ДРС зафиксированный образец освещается источником когерентного монохроматического света. Обычно используются лазеры с вертикальной поляризацией. Рассеянный свет от частиц собирается детектором под углом рассеивающего луча θ . Реже используется оптоволокно, которое действует одновременно как освещающая и обнаружающая оптика ( θ ≈ 180o ) [3][4]. Затем рассеянный луч выводится на Y-коннектор и направляется на датчик. В качестве датчиков в установках ДРС используются трубки фотоумножителя (ФУТ) или лавинные фотодиоды (ЛФД). Во входном окне фотоумножителя установлен фотокатод. Когда фотон от рассеянного света достигает фотокатода, благодаря фотоэлектрическому эффекту образуется электрон. Затем этот сигнал усиливается при помощи вторичной эмиссии, которая, в конечном счете, приводит к измеримому току на аноде. Другой вариант усилителей сигнала – использование лавинных фотодиодов. Из функционального принципа ФУТ и ЛФД следует, что измерение интенсивности рассеяния означает подсчет возбуждающих фотонов. Число фотонов за единицу времени является эквивалентом интенсивности. Зафиксированный сигнал обрабатывается для получения информации диффузионных свойств вещества. Наконец, для вывода данных и управления используется компьютер. Принципиальная схема установки динамического рассеяния света представлена на рисунке 3. 10 Рис. 3. 1.4. От рассеянного света к коэффициенту диффузии Падающий свет, освещающий частицы, может быть примерно описан как плоская волна в декартовой системе координат ( X , Y , Z ) , где луч распространяется в направлении оси Z [5]: E (r , t ) = eY Einc ( X , Y ) eikZ −iωt (1.4) Здесь E – вектор электрического поля, Einc – величина падающего электрического поля, r – вектор позиции, eY – единичный вектор в направлении оси Y. Волна рассеянного света частицы i может быть описана при помощи амплитуды рассеяния ai и оптической фазы ∼ ri ⋅ s : E sca ,i ( s, t ) = eY Einc ( X i , Yi ) ai eis r i −iωt (1.5) 11 Далее, вклады рассеянного света суммируются по всем частицам во всем рассеивающем объеме. Если точная временная зависимость подавляется совокупностью амплитуды рассеяния, то можно получить [5]: N ( ) u ( s, t ) = ∑ Einc ( X i , Yi ) ai r i eis r i i =1 (1.6) Современные инструменты ДРС используют одну или две стратегии для получения информации о коэффициенте диффузии и размере частиц по распределения спектральной плоскости вероятности частотных сдвигов. Большинство систем вычисляет интенсивность автокорреляционной функции по измерению счетчика фотонов: ⎛ 1 tmeas ⎞ + τ G2 (τ) = I (t ) I (t + τ) = lim ⎜ I t I t d t ( ) ( ) ⎟ ∫ ⎟ tmeas →∞ ⎜ t ⎝ meas 0 ⎠ (1.7) где угловые скобки … обозначают среднее время, τ – время задержки между двумя точками во времени, и tmeas – продолжительность эксперимента. Вычисление этой функции требует экстремально быстродействующих устройств, интересующая нас область начинается со времени задержки 10−9 секунд. В 1970-х и 1980-х использовалась только аппаратная корреляция. Говоря простым языком, это были примитивные компьютеры, способные только выполнять сложения и умножения. На выход они подавали напрямую корреляционную функцию. Обзор разработки и функционального принципа аппаратной корреляции был дан Шетцелем [5]. Сегодня мощности современных компьютеров достаточно для вычисления корреляционной функции программными корреляторами. 12 2 Легко показать, что G2 (τ) уменьшается от I (t ) 2 до I (t ) [6]. Предположив, что вычисление фотонов является процессом Гаусса, Шетцель [5] показал, что интенсивность автокорреляционной функции может быть выражена в терминах амплитуды рассеянного поля: G2 (τ) = u (t ) 2 u (t + τ) 2 (1.8) + u (t )u (t + τ)* u (t )* u (t + τ) Выражение во втором слагаемом – квадрат автокорреляционной функции амплитуды электрического поля, т.н. функция корреляции поля (ФКП) G1 (τ) . Равенство (1.8) впервые было описано Зигертом [7] и поэтому называется уравнением Зигерта. В настоящее время обычно используется такая форма: g 2 (τ) = 1 + bg1 (τ) 2 (1.9) Здесь, g1 (τ) – нормализованная автокорреляционная функция, а g 2 (τ) – нормализованная функция корреляции поля. Как будет показано позднее, они нормализуются с помощью G2 (∞) и G1 (0) соответственно. Параметр b соотносится с фактором когерентности и зависит от площади обнаружения, оптического угла и рассеивающих свойств системы. Обычно используются значения в интервале 0,9-1. Для монодисперсных частиц размера x и коэффициента диффузии Dt функция корреляции поля выражается как экспоненциальная зависимость: 2 g1 (τ) = e − Dt s τ (1.10) 13 На ранних стадиях развития фотонно-корреляционной спектроскопии использовались спектральные анализаторы для определения спектра сдвига частот S (ω) . Отношение S (ω) и коэффициента диффузии может быть найдено с помощью теоремы Вейнера-Кинчина [5]: ∞ S (iω) = ∫ G1 (τ)e − iωτ d τ 0 (1.11) Что означает, что спектральная мощности и амплитуда корреляционной функции – пары преобразования Фурье. После некоторых преобразований [3]: ⎤ 2 I sca ⎡ D s t ⎢ ⎥ S (iω) = S (ω) = π ⎢ ( D s 2 )2 + ( ω − ω)2 ⎥ 0 ⎣ t ⎦ (1.12) Это уравнение описывает форму кривой с Лоренцевым или распределением Каучи, с центром на частоте возбуждающего луча ω0 и с серединой ширины середины высоты Dt s 2 . Однако, спектральные анализаторы не способны точно определить и спектральную плотность, и частоту [8]. Сегодня определение спектральной частоты снова под пристальным вниманием в связи с использованием светоизлучающих волокон в устройствах, которые действуют одновременно как возбуждающее и обнаружающее волокна. Затем сигнал связывается в Y-коннекторе и ведет на детектор. Так как связывание – не идеально, обнаружающий рассеивающий свет смешивается с частью возбуждающего луча (Этот тип определения называется гетеродинным режимом, в то время как направление одного 14 рассеянного света называется гомодинным режимом). Затем сигнал показывает эффект биения света, то есть вариацию сигнала с частотой, которая эквивалентна сдвигу частоты ω − ω0 . 1.5. Анализ данных Техники анализа данных различны в некоторых аспектах устройств, работающих с корреляционным методом и работающими с спектром частоты. Так как устройства, используемые в работе, управляются коррелятором, анализ данных для этой цели может быть специфически описан. Результат первичных измерений – это ненормализованная автокорреляционная функция G2 (τ) . Первый шаг в анализе данных – нормализация с базовым термом G2 (∞) [9]. Это может быть получено экспериментально либо с помощью каналов с долговременной корреляцией, которые измеряют значение предела lim G2 (τ) , либо с контрольными τ→∞ каналами, которые определяют общее число фотонов и среднее их число за время эксперимента (расчетный фон) [5]. Ксу [10] предлагает использовать разницу обоих значений как оценку точности эксперимента динамического рассеяния света пока они будут идентичными при идеальных условиях. Во-вторых, большинство алгоритмов анализа требуют преобразования нормализованной функции корреляции поля g 2 (τ) в нормализованную автокорреляционную функцию g1 (τ) . Это представляет некоторые сложности при обработке отрицательных значений, которые могут возникать из-за шумов в сигнале [11]. Наиболее соответствующий тип преобразования это: 15 ⎧ g 2 ( τi ) − 1 ; g 2 ( τi ) − 1 ≥ 0 ⎪ b ⎪ g1 (τi ) = ⎨ g 2 ( τi ) − 1 ⎪ − ; g 2 ( τi ) − 1 < 0 ⎪⎩ b (1.13) Теперь, если частицы монодисперсные, уравнение может быть использовано для определения коэффициента диффузии. С другой стороны, если, как это бывает в большинстве случаев, система – полидисперсная и способствует экспоненциальному распаду коэффициента диффузии частицы, то нормализованная функция корреляции поля для сферических частиц будет иметь вид: ∞ g1 (τ) = ∫ q ( Dt ) e − Dt s τ dDt 2 0 (1.14) Здесь q ( Dt ) это плотность распределения диффузии коэффициентов. Возникает вопрос, с весовым вкладом частицы входят в распределение. В исследованиях ДРС измеряется рассеянный свет частиц, затем группируя эти результаты по эффективности рассеяния. Таким образом, в первую очередь распределения, полученные с помощью динамического рассеяния света, отсортированы по вкладам интенсивности рассеянного света. Определение q ( Dt ) из уравнения (1.14) вызывает некоторые математические затруднения. Этот тип уравнения известен как интегральное уравнение Фредгольма первого рода. В принципе, решение возможно, если интеграл заменить приближенно дискретной суммой по правилу трапеции. Тогда уравнение (1.14) можно переписать: 16 N cl g1 (τi ) = ∑ ΔQ ( Dt , j ) e − Dt , j s 2 τ j =1 g1 = K ⋅ ΔQ (1.15) (1.16) где N cl - количество точек разбиения (точек сетки) в дискретной сумме. Матрица K содержит отношения между коэффициентами диффузии и временем отклика (корни матричного уравнения). Дискретное распределение ΔQ может быть теперь найдено при помощи инверсии корней. Для экспериментально найденной функции корреляции поля к уравнению (1.16) добавляется еще одно слагаемое: g1 = K ⋅ ΔQ + ε (1.17) где ε - по умолчанию неизвестная ошибка измерения, учтенная в измеряемом сигнале. Здесь инверсия измеряемых данных в распределение коэффициента диффузии становится некорректной задачей [3][8][9][10][12], т.к. в диапазоне ошибок измерения может быть найдено бесконечное число равновероятностных решений q ( Dt ) . Даже очень малые вариации в g1 (τ) могут привести к полностью другому распределению [13]; также утверждается, что ошибки инверсии несбалансированны. Отсюда, алгоритмам анализа данных приходится иметь дело с математической природой проблемы инверсии. В общем виде, существуют три различных подхода при работе с данными динамического рассеяния света. 1.6. Алгоритмы обработки данных эксперимента ДРС Алгоритмы, не требующие первоначальной информации. В этом типе алгоритмов не определено никакое распределение коэффициентов 17 диффузии, а только некоторые средние значения и их моменты. Один из наиболее известных в анализе данных динамического рассеяния света – это метод моментов, первоначально разработанный Коппелом [14]. Этот метод быстр и удобен в работе и поэтому включен в международную организацию по стандартизации международного стандарта [16][17] и другие разработали метод (ISO 13321) [15]. Финси исключительных значений и реконструкции, который также требует не дополнительной информации, но не получил существенную ценность в анализе данных динамического рассеяния света. Нелинейная оптимизация. Предполагается, что хорошо известен тип распределения с несколькими изменяющимися параметрами. Тогда эти параметры могут быть оценены нелинейной процедурой оптимизации (такой, как метод Левенберга-Маркуарта). Совершенство оптимизации зависит от удачного угадывания переменных. Обычно используемые функционалы являются одинарными и двойными экспонентами, нормальными и логарифмически-нормальными распределениями (моно - и бимодальными) или распределениями Шульца-Цимма [10]. Схемы обратного распределения Лапласа. Алгоритмы этого рода не предполагают определенный тип распределения коэффициентов диффузии, так что они наиболее общие. Несколько допущений делают возможным решить эту математическую задачу. 18 Глава 2. Постановка задачи По результатам проведенных измерений проводится обработка эксперимента. Целью настоящей работы является определение по результатам эксперимента коэффициента диффузии и размера частиц макромолекул. Размер частиц и коэффициент диффузии можно получить, используя метод моментов. Но метод моментов позволяет предположить всего два типа зависимости – нормального или экспоненциального распределения, а также дает очень большую ошибку вычислений. Вычисление моментов третьего и четвертого не имеет смысла, а второго момента (дисперсии) – дает ошибку около 20%. Необходимо разработать программу, которая по данным эксперимента будет находить нужные параметры зависимости распределения, чтобы затем получить по ним значения коэффициента диффузии и размеры частиц с высокой точностью. В данной работе было принято решение использовать метод нелинейной оптимизации Левенберга-Маркуарта, позволяющий добиться большой точности и гибкости в выборе зависимости распределения. В этом случае параметры будут подобраны таким образом, что теоретический спектр максимально близко совпадет с экспериментальными данными. 19 Глава 3. Методы определения размеров частиц при помощи ДРС В используемом в эксперименте приборе фильмы Malvern оперируют только одним углом в 173 градуса и используют зеленый и красный свет лазера [8]. По данным прибора можно получить размер частиц и коэффициент диффузии, используя метод моментов. Но метод моментов, как будет показано ниже, дает очень неточные результаты. Ошибка метода очень велика, кроме того, существует возможность исследования всего вида распределения корреляционной функции частиц – экспоненциального и нормального распределения. Существует другая возможность – сделать предположение о типе распределения коэффициентов диффузии и подогнать параметры при помощи метода нелинейной оптимизации. В данной работе это было проделано методом Левенберга-Маркуарта. 3.1. Метод моментов В статистике, функция генерации моментов ℵ(t ) определена как натуральный логарифм от характеристической функции Φ (t ) возможного распределения q ( X ) [19]: ⎡ ∞ itX ⎤ ℵ(t ) = ln ( Φ (t ) ) = ln ⎢ ∫ e q ( X )dX ⎥ ⎣ −∞ ⎦ (3.1) Для целей анализа данных ДРС Коппел использовал [14]: 20 q( X ) = q( D) ∞ Φ (−τ, s ) = − Ds τ ∫ e q( D)dD = g1 (τ, s) (3.2) 2 −∞ ℵ(−τ, s ) = ln g1 (τ, s ) (3.3) (3.4) Моменты ℵi ( s ) определены как коэффициенты в ряду Маклорена ℵ(−τ, s ) [19]: (−τ)i ℵ(−τ, s ) = ∑ K i ( s ) i! i =1 ∞ (3.5) Так, моменты могут быть соотнесены с моментами M i от q( D) , где M 1 – среднее значение (математическое ожидание) и M i , i > 1 – центральные моменты вокруг среднего значения: ∞ K1 = M 1 = D = ∫ Dq ( D)dD 0 ∞ K 2 = M 2 = ∫ ( D − D ) 2 q ( D ) dD 0 K3 = M 3 K 4 = M 4 − 3( M 2 ) (3.6) 2 Т.е. первый момент описывает значение коэффициента диффузии, второй момент описывает относительную ширину распределения q( D) при нормализованным ( K1 ) . Нормализованная переменная обычно соотносится 2 с полидисперсным индексом PDI : PDI = K2 ( K1 ) 2 (3.7) 21 Иначе говоря, K 3 и K 4 содержат информацию о коэффициентах асимметрии и эксцесса измеряемых распределений соответственно. Теперь процедура формирования анализа методом моментов на измеряемых при помощи ДРС данных должна быть ясна. Из условия автокорреляционной функции найдем преобразование к g1 (τ) (уравнение 1.13), затем возьмем натуральный логарифм (уравнение 3.4). Наконец, ln g1 (τ) подгоняется полиномом (уравнение 3.5) для получения моментов. Найдем с помощью метода моментов параметры коэффициентов рассматриваемой функции распределения y = Ae −2 Bx . Вычислим нормировочный коэффициент по формуле: ∞ ∫ Ae −2 Bx dx = 1 (3.8) 0 Нормировочный коэффициент составит A . 2B Найдем первый и второй моменты – математическое ожидание и дисперсию соответственно: ∞ K1 = ∫ xAe 0 = −2 Bx dx = xAe ∞ A ⎮ − xde −2 Bx = ∫ 2B 0 −2 Bx ∞ 0 ∞ ⎤ A ⎡ 1 −2 Bx ∞ ⎤ A ⎡ −2 Bx ∞ A 2B 1 ⎮ − − ⋅ = xe e −2 Bx dx ⎥ = e ⎮0 ⎥ = ⎢ 0 2 ∫ ⎢ 2B ⎣ ⎦ 4B A 2B 0 ⎦ 2B ⎣ 2B (3.9) 2 1 1 ⎛ 1 ⎞ − = K2 = ⎜ ⎟ 2B2 ⎝ 2B ⎠ 4B2 (3.10) 22 Однако в этой простой процедуре должны быть даны некоторые поясняющие предостережения. Во-первых, корреляционная функция должна быть вырезана в точке с безусловными значениями (т.н. время задержки), в противном случае результаты искажают при помощи подгоняющего алгоритма сами себя и ошибки измерения. Обычно измерения прекращаются, когда автокорреляция отклоняется на 10% от максимального значения. Это, очевидно, довольно упрощенный подход, поскольку он может игнорировать важный вклад в ввести погрешности распределение измерений, коэффициентов если диффузии максимальное или значение корреляционной функции уже мало. С другой стороны, остановка измерений вручную может быть сделана только опытным пользователем, так что этот способ до сих пор используется в коммерчески доступных инструментах. Во-вторых, даже с очень точным измерительным прибором, случайные ошибки вызывают изменения в подгонке моментов. Таким образом, в то время как K1 может быть в пределах 1% неопределенности, уже K 2 вызывает ошибки до 20%, следовательно, определение K 3 и K 4 не рекомендуется в большинстве случаев [14]. В-третьих, при логарифмировании функции корреляции поля веса точек изменяются. Таким образом, либо надлежащая весовая функция должна быть предоставлена, или функция корреляции поля должна подгоняться непосредственно, без логарифмирования [10][20]. Здесь теряется возможность использования алгоритма линейных наименьших квадратов [21]. Вместо этого надлежит применять нелинейный метод, такой как ГауссаНьютона или метод Левенберга-Маркуарта. К счастью, результаты невзвешенной линейной зависимости могут служить хорошими начальными догадками для нелинейной подгонки. 23 В данной работе мы можем предположить тип распределения функции, таким образом, имеется возможность воспользоваться методом нелинейной оптимизации, или, конкретнее, методом Левенберга-Маркуарта [21]. 3.2. Нахождение коэффициента диффузии Автокорреляционная функция изменяется в зависимости от интенсивности рассеянного света: 1 G (t ) = I (0) I (t ) = lim T →∞ 2T (2) Индекс (2) T ∫ I (t′) ⋅ I (t′ + t )dt′ −T (3.11) показывает, что G (2) – автокорреляционная функция второго порядка – т.е. с участием интенсивностей, которые являются квадратами электрических полей. Использование заглавной буквы G означает, что данные не нормируется. Позже мы увидим, что нормированные корреляционные функции – это g (1) , которая представляет собой нормированную автокорреляционную функцию электрического поля и g (2) , которая является функцией второго порядка. По прошествии некоторого времени, сигнал в корреляторе хорошо аппроксимируется: ( G (2) (t ) = B 1 + f g (1) (t ) 2 ) (3.12) В этом выражении B и f – экспериментальные параметры, которые будут обсуждены позже. Наибольшую важность представляет g (1) (t ) , 24 автокорреляционная функция поля. Во многих случаях, g (1) (t ) представима в виде простой экспоненты: g (1) (t ) = e −Γt (3.13) Где Γ – обратная величина времени корреляции, τ – время задержки между двумя точками во времени: Γ = τ−1 = q 2 Dm (3.14) Где Dm – коэффициент диффузии. Величина рассеивающего вектора q : q= ( 2) 4πn sin θ λ0 (3.15) Где λ 0 – длина волны лазера в вакууме, n – коэффициент преломления среды, а θ – угол рассеяния. На рисунке 4 представлены базовые понятия ДРС – интенсивность, угол рассеяния, корреляционная функция, рассеяние света в установке. Рис. 4. 25 3.3. Нахождение размера частиц Главный вопрос в ДРС – это нахождение автокорреляционной функции электрического поля g1 (t ) , которая для полидисперсных систем состоит из суммы экспоненциальных слагаемых: g1 (t ) = ∑ Ai e −Γit i (3.16) Амплитуда Ai пропорциональна молекулярной массе и концентрации взвесей i , измененной показателем формы частицы при достаточно больших частицах: Ai ∼ ci M i P ( qRg ,i ) (3.17) При бесконечном разбавлении обратная величина времени корреляции Γi связана с коэффициентом диффузии (и, следовательно, гидродинамическим радиусом) той частицы и вектора рассеяния: q 2 kT Γi = q Do = 6πηo R h ,i 2 (3.18) Где закон Стокса используется в последнем уравнении для выражения D0 и гидродинамического радиуса Rh в вязкости η0 . 26 3.4. Линейная оптимизация данных Используется в случае простейших монодисперсных рассеивателей. Наиболее простой способ линейной оптимизации описан в книге Пресса, Фланнери и Веттерлинга [21]. Уравнения (3.12) и (3.13) могут быть переписаны в виде: G (2) (t ) = B (1 + f ⋅ e −2 Γt ) (3.19) Которое, в свою очередь, может быть преобразовано в: y = ln ( G (2) (t ) − B ) = ln ( Bf ) − 2Γt (3.20) Так, на рисунке 5 представлен эскиз графика y (t ) , который имеет наклон −2Γ , из которого можно вычислить коэффициент диффузии Dm , так как Γ = q 2 Dm . Рис. 5. График показывает идеальное, линейное поведение (прямую линию), в то время как полидисперсные образцы выглядят как кривая линия. Начальный наклон называется первым моментом и обозначается символом Γ , так как он представляет среднюю скорость распада. Для того чтобы получить 27 первый момент, осуществляется полиномиальная оптимизация кривой y (t ) . Это т.н. метод моментов (кумулянтный анализ); порядок моментов определяет количество термов в многочлене: для метода моментов первого порядка подходит просто прямая, для метода моментов второго порядка – квадратный многочлен, для метода моментов третьего порядка – кубический многочлен и т. д. Метод моментов был представлен Коппелом, который показал, что Γ пропорционально коэффициенту диффузии: (3.21) Γ = q2 D ∑n M D D= ∑n M 2 i i i i i 2 i (3.22) i ln ( g (1) (t ) ) = −Γt + 1 μ 2t 2 + … 2! (3.23) Где переменная μ 2 во втором слагаемом – это второй момент. Для идеального распределения одной экспоненты, он должен быть около 0. Как и в первом моменте, получаемое значение для второго момента неэкспоненциальной зависимости немного различается, с порядок оптимизации, который используется. Мера полидисперсности распределения может быть описана в терминах параметра полидисперсности или т.н. нормированной дисперсии POLYD : POLYD = μ2 Γ2 (3.24) POLYD трудно измерить, это отношение двух величин, которые сами зависят немного от порядка оптимизации. Как правило, если POLYD > 0,3 , настало время рассмотреть другой подход. Метод моментов следует 28 использовать для одного почти экспоненциального распада. 3.5. Нелинейная оптимизация данных В методе моментов, интересующие нас параметры ( μ 2 , Γ ) появляются как линейные коэффициенты независимого параметра t (в уравнении 3.23). Подгонка моментов – малые искажения после огромной операции линеаризации. В целом, можно было бы попытаться подогнать G (2) или g (1) −Γi t , то возможно было бы искать Ai и Γi методом напрямую. Если g (1) = ∑ Ae i i проб и ошибок. Алгоритм Левенберга-Маркуарта [22] делает этот процесс настолько рациональным, насколько это возможно. Сперва в этом алгоритме делаются начальные предположения об A и Γ . Программа выполняет поиск для улучшения параметров - то есть тех, которые уменьшают (но, возможно, в действительности не минимизируют) разницу между подгоняемыми данными и данными эксперимента. Параметр χ 2 используется для наблюдения за прогрессом процесса оптимизации: χ2 = Функция y fit 2 1 N w i ( yi − y fit ,i ) ∑ ν 1 (3.25) – произведение экспонент, чьи амплитуды и скорости распада подгоняются. Она оценивается раз в то же время ti , где были посчитаны экспериментальные данные. Символ ν – число степеней свободы, примерно такое же, как количество точек данных N . Статистические веса wi – обратно пропорциональны квадрату неопределенности каждой точки −2 2 данных: wi = σi . Смысл χ заключается в следующем: когда он единица, ошибки подгонки сопоставимы с неопределенностью в данных измерения. Эти данные подгоняются, используя модель функции y fit . 29 2 Необходимо соблюдать внимательность, вычисляя χ . Большое 2 2 значение χ вовсе не означает, что есть какие-либо проблемы с данными. χ это результат качества данных, шумов в данных и адекватности выбора подгоняемой функции. Единственное, о чем нельзя забывать – это то, что метод нелинейной оптимизации способен получать локальный минимум. [23] Чтобы избежать застревания в локальном минимуме, начальные предположения разнообразны, и ведется наблюдение, какие значения (оптимальные) алгоритм Левенберга-Маркуарта будет возвращать снова и снова. Если это так, то предполагается, что эти подогнанные параметры действительно выражают данные. Этим метод отличается от методов линейной оптимизации, для которых наилучшие параметры определяются аналитически. Рассмотрим N точек ( xi , yi ), i = 1..N , полученных экспериментально, и модельную функцию, которая зависит от M параметров a j , j = 1..M y ( x) = y ( x, a1 ,...aM ) (3.26) Для нахождения значений параметров a j применим метод наименьших квадратов. N 2 minimize over a1...aM : ∑ [ yi − y( xi ; a1...aM )] i =1 (3.27) Предположим, что у каждой точки yi имеется ошибка вычисления, которая является независимо случайной и распределенной по нормальному закону распределения вокруг действительного значения модельной функции y ( x) . Предположим, также, что все среднеквадратические отклонения σ 30 одинаковы для всех точек. В этом случае, вероятность множества точек есть результат произведения вероятностей каждой точки, ⎧⎪ ⎡ 1 ⎛ yi − y ( xi ) ⎞ 2 ⎤ ⎫⎪ ⎨exp ⎢ − ⎜ ∏ ⎟ ⎥ Δy ⎬ 2 σ ⎝ ⎠ ⎥⎦ ⎪⎭ i =1 ⎪ ⎢ ⎣ ⎩ N (3.28) Максимизация данного выражения эквивалентна минимизации его логарифма с обратным знаком, а именно: ⎡ N [ yi − y ( xi ) ]2 ⎤ ⎢∑ ⎥ − N log Δy 2σ 2 ⎢⎣ i =1 ⎥⎦ (3.29) Так как N , σ , Δy являются константами, то минимизация этого выражения эквивалентна минимизации (3.27). Если же каждая точка имеет ( xi , yi ) свое собственное среднеквадратическое отклонение σ i , то в уравнении (3.28) появится индекс i у каждого σ . Поэтому задача сводится к минимизации следующего выражения: ⎛ y − y ( xi , a1...aM ) ⎞ χ (a ) ≡ ∑ ⎜ i ⎟ σi i =1 ⎝ ⎠ 2 N 2 (3.30) Если взять производные от выражения (3.30) по всем параметрам ak , то получаются уравнения, которые должны выполняться в минимуме χ 2 . N ⎛ y − y ( x ) ⎞ ⎛ ∂y ( xi ,..ak ..) ⎞ 0 = ∑⎜ i 2 i ⎟⎜ ⎟ , k = 1...M ∂ak σi i =1 ⎝ ⎠⎝ ⎠ (3.31) Уравнение (3.31) является системой M нелинейных уравнений для M неизвестных ak . 31 Рассмотрим модель, нелинейно зависящую от множества M неизвестных параметров ak , k = 1...M . Для определения наиболее подходящих значений параметров, стоится функция χ 2 и производится ее минимизация. Так как зависимость от параметров не является линейной, то процесс минимизации должен проходить итеративно. Задается начальное значение параметров, которое должно улучшаться на каждой итерации алгоритма. Алгоритм повторяется до тех пор, пока χ 2 не перестанет уменьшаться. Считается, что в окрестности минимума функция χ 2 хорошо аппроксимируется квадратичной формой, которую можно записать следующим образом: 1 2 χ 2 (a ) = γ − d ⋅ a + a ⋅ D ⋅ a (3.32) где d – вектор M, D – матрица M* M. Если аппроксимация достаточно хороша, то переход от начального значения параметров acur к решению amin происходит за одну итерацию, а именно: amin = acur + D −1 ⋅ ⎡⎣ −∇χ 2 (acur ) ⎤⎦ (3.33) С другой стороны, (3.33) может оказаться слишком локальной аппроксимацией функции, которую мы пытаемся минимизировать к acur . В этом случае, необходимо сделать шаг по направлению градиента, т.е.: anext = acur − const ⋅ ⎡⎣∇χ 2 (acur ) ⎤⎦ (3.34) где константа достаточно мала. Для того чтобы использовать (3.33) и (3.34), необходимо уметь вычислять градиент функции χ 2 на любом наборе параметров a . Также для использования (3.33) необходимо знать значение матрицы D, которая 32 является матрицей вторых производных (матрицей Гаусса) функции χ 2 на любом a . 3.6. Вычисление градиента и матрицы Гаусса Модельная функция имеет вид: y = y ( x; a) (3.35) а функция χ 2 : ⎛ y − y ( xi , a ) ⎞ χ = ∑⎜ i ⎟ σi i =1 ⎝ ⎠ 2 N 2 (3.36) Градиент χ 2 по параметрам a , который равен нулю в точке минимума функции χ 2 , имеет компоненты: N y − y ( xi , a ) y ( xi , a) ∂χ 2 = −2∑ i , k = 1...M σ i2 ∂ak ak i =1 (3.37) Проводя повторное дифференцирование, получим: N ∂2χ 2 1 = 2∑ 2 ∂ak ∂al i =1 σ i ⎡ ∂y ( xi , a ) ∂y ( xi , a ) ∂ 2 y ( xi , a) ⎤ − [ yi − y ( xi , a ) ] ⎢ ⎥ ∂al ∂al ∂ak ⎦ ⎣ ∂ak (3.38) Положим βk ≡ − 1 ∂χ 2 1 ∂2 χ 2 , α kl ≡ 2 ∂ak 2 ∂ak ∂al (3.39) 1 2 Полагая [α ] = D в уравнении (3.33), его можно представить в виде системы линейных уравнений: 33 M ∑α l −1 kl δ al = β k (3.40) Эта система решена для δ al , которое при добавлении к текущему приближению дает следующее его значение. Матрица [α ] , равная половине матрице Гаусса, обычно называется матрицей кривизны. Уравнение (3.34) можно представить в виде: δ al = const × βl (3.41) Члены, содержащие вторые производные, можно опустить, когда они равны нулю или пренебрежительно малы по сравнению с членами, включающие первые производные. Таким образом, будем использовать в качестве определения α kl следующую формулу: 1 ⎡ ∂y ( xi , a ) ∂y ( xi , a ) ⎤ ⎥ 2 ⎢ ∂ak ∂al ⎦ i =1 σ i ⎣ N α kl = ∑ (3.42) 3.7. Метод Левенберга-Маркуарта Метод Левенберга-Маркуарта основан на двух простых, но очень важных, утверждениях. Рассмотрим константу в уравнении (3.41). Нет никакой информации о ней, в том числе и в самом градиенте, который определяет только тангенс угла наклона. Первое утверждение заключается в том, что компоненты матрицы Гаусса дают информацию о порядке величины в данной задаче. 2 Величина χ безразмерная, т.е. является просто числом. Это очевидно из ее определения (3.36). С другой стороны, β k имеет единицы измерения 1 α k , которая может быть размерной, т.е. иметь единицы cm −1 , кВт/ч или 34 другие. (На самом деле, каждый компонент β k может иметь различные единицы измерения!) Поэтому, коэффициент пропорциональности между β k 2 и δ ak должен иметь единицы измерения ak . Просмотрев все компоненты [α], только одна величина, имеет такую же размерность, и это 1 α k , обратная к диагональному элементу. Поэтому, она должна устанавливать масштаб константы. Но этот масштаб может сам по себе быть очень большим. Поделим константу на некоторую (безразмерную) величину λ. Другими словами, заменим уравнение (3.42) следующим: δ al = 1 β или λ allδ al = βl λ all l (3.43) Важно, чтобы all было положительным, но это гарантируется определением (3.43). Второе утверждение состоит в том, что уравнения (3.43) и (3.40) можно скомбинировать при определении новой матрицы α ' : α 'jj ≡ α jj (1 + λ ) α 'jk ≡ α jk ( j ≠ k ) (3.44) и затем заменить (3.40) и (3.43) следующим выражением: M ∑α l =1 ' kl δ al = β k (4.45) Когда λ очень велико, то в матрице α ' основную роль будут играть диагональные элементы, поэтому уравнение (3.45) становится идентичным (3.43). С другой стороны, по мере того, как λ стремится к нулю, уравнение (3.45) переходит в (3.40). 35 Выбрав начальное приближение множеству подгоняемых параметров a , по методу Левенберга-Маркуарта рекомендуется сделать следующие шаги: • Вычислить χ 2 (a) • Выбрать начальное значение для λ, например λ = 0.001 • (+) Решить систему линейных уравнений (3.45) для δ a и оценить χ 2 (a + δ a ) • χ 2 (a + δ a) ≥ χ 2 (a) , то умножить λ на 10 (или любой другой постоянный множитель) и перейти к (+). • Если χ 2 (a + δ a) < χ 2 (a) то разделить λ на 10 (или любой другой постоянный множитель), изменить текущее решение a ← a + δ a и перейти к (+). Необходимо также обсудить условие окончания итерации. Установлено, что изменение параметров, которое приводит к изменению χ 2 на величину << 1, никогда не имеет никакого статистического значения. Более того, не принято искать параметры, разбросанные вокруг минимума на довольно большом пространстве, имеющем сложное строение. Причиной этому является то, что метод Левенберга-Маркуарта сводится к методу нормальных уравнений, следовательно, имеет такую же проблему, связанную с вырождением минимума. При нулевом элементе возможен полный отказ, но он нежелателен. Чаще случается, что маленький элемент вызывает большую коррекцию, которая потом отклоняется, а значение λ увеличивается. Для достаточно больших λ матрица [α ] является положительно определенной и может не иметь маленьких элементов. Поэтому, этот метод стремится к тому, чтобы не было нулевых элементов. 36 Эти рассуждения приводят к тому, что на практике итерации могут остановиться при незначительную первом величину, или втором например, случае меньшую, уменьшения χ2 чем Нельзя 0.001. на прекращать итерации на шаге, когда χ 2 увеличивается: это показывает, что λ еще не установилось в нужное значение. Когда минимум достигнут, нужно положить λ=0 и вычислить матрицу [C ] ≡ [α ] −1 (3.46) которая является матрицей стандартных отклонений подгоняемых параметров a . 37 Глава 4. Программная реализация и обсуждение результатов Была разработана информационная система, которая по экспериментальным данным находит нужные параметры зависимости распределения и, как следствие, значения коэффициента диффузии и размера частиц. Параметры подгоняются с помощью метода Левенберга-Маркуарта таким образом, чтобы теоретическое распределение размера частиц максимально совпадало с экспериментальными данными. Ниже опишем главные функции, реализующие метод ЛевенбергаМаркуарта для нахождения параметров нелинейных моделей. Массив a[1..ma] заполняется значениями параметров, а ia[1..ma] должен содержать единицы и нули, означающие, должен ли соответствующий параметр в массиве a подгоняться или же остаться в своем исходном значении. Функция mrqmin выполняет одну итерацию по методу ЛевенбергаМаркуарта. Сначала она вызывается с alamda < 0, означающим инициализацию. Значание alamda устанавливается на первом и всех последующих вызовах в предполагаемое значение λ для следующей итерации; a и chisq возвращают наиболее подходящиe параметры, найденныe на данной итерации, и их χ2 , соответственно. Когда станет ясно, что метод сошелся, следует положить alamda равным нулю на последней итерации. Значения alpha, a и chisq нельзя менять между вызовами. Также нельзя менять и alamda, за исключением последней итерации. 38 Метод mrqmin вызывает функцию mrqcof для вычисления матрицы [α] (выражение 3.42) и вектора β (уравнения 3.37 и 3.39). В свою очередь, mrqcof вызывает функцию funcs(x, a, y, dyda), определяемую пользователем. Эта функция должна вычислять y ≡ y(xi ; a) и вектор производных dyda ≡ ∂y/∂ak . Полученные в результате нелинейной оптимизации значения корреляционной функции хорошо аппроксимируют экспериментальные данные. Работа проводилась на одной, двух и трех частицах разного типа соответственно [21]. В проделанной работе делается предположение об экспоненциальном −2 Bi x , вследствие чего на вход подаются начальные распределении y = ∑ Ae i i значения от двух до шести параметров (в зависимости от количества типов рассматриваемых частиц), на выход – оптимизированные значения параметров Ai и Bi и, как следствие, значения корреляционной функции. По значениям оптимизированных параметров легко находятся коэффициент диффузии и размер заданных частиц (уравнение (3.18)). В таблицах 1, 2, 3 представлены вычисленные данные о размерах частиц при предположении о типе распределения y = Ae −2 Bx 2 , y = ∑ Ak e −2 Bk x и k =1 3 y = ∑ Ak e −2 Bk x соответственно. Ошибка вычисления методом Левенбергаk =1 Маркуарта заведомо меньше ошибки экспериментальных измерений, которая составляет 1-2%. 39 Таблица 1. Размер частицы Вычисленный размер Относительная (нм) (нм) ошибка (%) 50 49 1.88 300 296 1.12 600 590 1.54 Таблица 2. Размер частицы Вычисленный размер Относительная (нм) (нм) ошибка (%) 50, 200 49, 202 1.08, 1.25 200, 500 198, 493 0.95, 1.31 300, 600 304, 611 1.62, 1.9 Таблица 3. Размер частицы Вычисленный размер Относительная (нм) (нм) ошибка (%) 50, 200, 400 49, 202, 397 1.8, 1.45, 2.32 100, 200, 600 101, 202, 609 1.9, 1.03, 1.55 300, 500, 1000 303, 491, 1017 1.03, 1.8, 1.71 Ниже представлены графики распределения для частиц размера 600 нм, 300 и 600 нм, и 300, 500 и 1000 нм соответственно. Красными линиями показаны экспериментальные значения, зеленым – значения, полученные в результате подгонки функции методом Левенберга-Маркуарта. 40 Для типа распределения вида y = Ae −2 Bx : Рис. 6. 2 Для типа распределения вида y = ∑ Ak e −2 Bk x : k =1 Рис. 7. 41 3 Для типа распределения вида y = ∑ Ak e −2 Bk x : k =1 Рис. 8. 42 Выводы. В рамках данной работы была разработана информационная система, которая по полученным экспериментальным способом данным находит необходимые параметры зависимости распределения, а затем по ним – значения коэффициента диффузии и размера частиц. В работе был использован метод нелинейной оптимизации ЛевенбергаМаркуарта. Несомненным преимуществом использования этого метода является возможность предположить различные типы распределения. В данной работе удалось одновременно исследовать смесь частиц разного 3 размера с типом распределения вида суммы трех экспонент y = ∑ Ak e −2 Bk x . k =1 На приведенных графиках видно, что параметры распределения удалось подогнать таким образом, чтобы оптимизированная корреляционная функция была максимально близка к кривой, полученной экспериментальным путем. Результатом работы является разработка программы, позволяющей обработать данные, полученные по результатам прибора фирмы Malvern и получить по ним размеры сферических частиц. 43 Литература [1] Einstein, A.: Über die von der molekularkinetischen Theorie der Wärme geforderte Bewegung von in ruhenden Flüssigkeiten suspendierten Teilchen (On the motion of suspended particles in quiescent fluids required by the molecular-kinetic theory of heat). Ann. Phys. 17 (1905), 549–560. [2] Einstein, A.: Zur Theorie der Brownschen Bewegung (On the theory of Brownian motion). Ann. Phys. 19 (1906), 371–381. [3] Willemse, A.: Optical measuring techniques for particulate systems at the fringes of concentration. Ph.D. thesis, TU Delft, 1998. [4] Richtering,W.; Müller, H.: Comparison between viscosity and diffusion in monodisperse and bimodal colloidal suspensions. Langmuir 11, 10 (1995), 3699–3704. [5] Schätzel, K.: Single-photon correlation techniques. In Dynamic Light Scattering: The method and some applications, edited by Brown, W., no. 49 in Monographs on the physics and chemistry of materials, Clarendon Press, Oxford, 1993, pp. 76–148. [6] Berne, B.J.; Pecora, R.: Dynamic Light Scattering - with Applications to Chemistry, Biology, and Physics. Robert E. Krieger Publishing Company, Malabar, 1990. [7] Siegert, A.J.F.: On the fluctuations in signals returned by many independently moving scatterers. MIT Rad. Lab. Rep. 465, Massachusetts Institute of Technology, 1943. [8] Finsy, R.: Particle sizing by quasi-elastic light scattering. Adv. Colloid Interface Sci. 52 (1994), 79–143. [9] Kätzel, U.: Analyse von Partikelgrößenverteilungen mit Hilfe der Photonenkorrelati onsspektroskopie (Analysis of particle size distributions by means of photon correlation spectroscopy). Student Project, TU Dresden, 2003. 44 [10] Xu, R.: Particle Characterization: Light Scattering Methods. Particle Technology Series, Kluwer Academic Publishers, London, 2000. [11] Finsy, R.; de Jaeger, N.; Sneyers, R.; Gelade, E.: Particle sizing by photon correlation spectroscopy. part iii: Mono and bimodal distributions and data analysis. Part. Part. Syst. Charact. 9 (1992), 125–137. [12] Štˇepánek, P.: Data analysis in dynamic light scattering. In Dynamic Light Scattering: The method and some applications, edited by Brown, W., no. 49 in Monographs on the physics and chemistry of materials, Clarendon Press, Oxford, 1993, pp. 177–240. [13] Ruf, H.: Data accuracy and resolution in particle sizing by dynamic light scattering. Adv. Colloid Interface Sci. 46 (1993), 333–342. [14] Koppel, D.E.: Analysis of macromolecular polydispersity in intensity correlation spec troscopy: The method of cumulants. J. Chem. Phys. 57, 11 (1972), 4814–4820. [15] ISO 13321: Particle Size Analysis: Photon Correlation Spectroscopy. International Standard, Beuth-Verlag, Berlin, 1996. [16] Finsy, R.; de Groen, P.; Deriemaeker, L.; van Laethem, M.: Singular value analysis and reconstruction of photon correlation data equidistant in time. J. Chem. Phys. 91, 12 (1989), 7374–7383. [17] Finsy, R.; de Groen, P.; Deriemaeker, L.; Geladé, E.; Joosten, J.: Data analysis of multiangle photon correlation measurements without and with prior knowledge. Part. Part. Syst. Charact. 9 (1992), 237–251. [18] http://www.malvern.com/LabEng/products/IWTM/size_wet.htm [19] Abramowitz, M.; Stegun, I.A. (eds.): Handbook of Mathematical Functions With Formulas, Graphs and Mathematical Tables. 10th edn., no. 55 in Applied Mathematics Series, US Department of Commerce, National Bureau of Standards, Washington D.C., 1973. [20] Hassan, P.A.; Kulshreshtha, S.K.: Modification to the cumulant analysis of polydispersity in quasielastic light scattering data. J. Colloid Interface Sci. 300, 2 (2006), 744–748. 45 [21] Wang, Y.; Zheng, Y.; Shen J.; Liu W.; Zhu X.: Simulation of dynamic light scattering signal for ultrafine particles based on the exponential model, Shanghai University of Science and Technology, China, 2-4. [22] "Numerical Recipes" by Press et al. [23] Provencher, S.W.; Štˇepánek, P.: Global analysis of dynamic light scattering autocorrelation functions. Part. Part. Syst. Charact. 13, 5 (1996), 291–294. 46