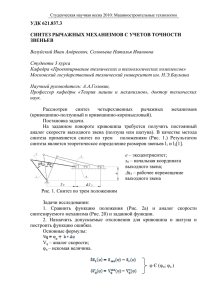
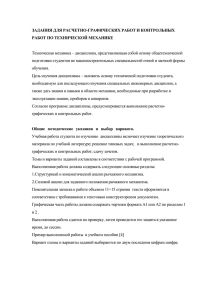
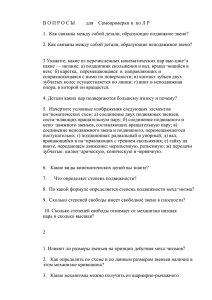
теория механизмов и машин - Томский Государственный
реклама

Федеральное агентство по образованию Томский государственный архитектурно-строительный университет ТЕОРИЯ МЕХАНИЗМОВ И МАШИН Методические указания и задания на курсовую работу для студентов немеханических специальностей Составители А.А. Никифоров, В.Ф. Филиппов Томск 2007 1 Теория механизмов и машин: методические указания и задания на курсовую работу для студентов немеханических специальностей / Сост. А.А. Никифоров, В.Ф. Филиппов. – Томск: Изд-во Том. гос. архит.-строит. ун-та, 2007. – 45 с. Рецензент Г.Н. Гаращук Редактор Е.Ю. Глотова Методические указания составлены для студентов немеханических специальностей университета, выполняющих курсовую работу по курсу «Теория механизмов и машин». В указаниях рассматриваются цель, содержание и порядок выполнения курсовой работы, даются необходимые рекомендации по вопросам анализа рычажных механизмов, приведены задания на курсовую работу. Печатаются по решению методического семинара кафедры прикладной механики и материаловедения. Утверждены и введены в действие проректором по учебной работе В.С. Плевковым с 01.09.2007 до 01.09.2012 Подписано в печать . Формат 60×84/16. Бумага офсет. Гарнитура Таймс. Печать офсет. Уч.-изд. л. 2,9. Тираж 300 экз. Заказ № Изд-во ТГАСУ, 634003, г. Томск, пл. Соляная, 2. Отпечатано с оригинал-макета в ООП ТГАСУ. 634003, г. Томск, ул. Партизанская, 15. 2 1. ЦЕЛЬ И ЗАДАЧИ Целью выполнения курсовой работы по теории механизмов и машин является приобретение практических навыков применения общих методов проектирования и исследования механизмов и машин, которые изучаются студентами в теоретическом курсе. В задании на курсовую работу перед студентом ставятся задачи анализа наиболее распространенных в современной технике рычажных механизмов. Анализ механизмов включает исследования их структуры, кинематических и динамических свойств. 2. ОБЪЕМ КУРСОВОЙ РАБОТЫ, ВЫБОР ТЕМЫ И ВАРИАНТА Курсовая работа предусматривает выполнение двух листов чертежей формата А2 с пояснительной запиской примерно на 10...20 страницах рукописного текста на стандартных листах писчей бумаги формата А4. В данные методические указания включены 10 тем (заданий) на исследование машинных агрегатов, включающих в себя рычажный механизм. Каждое задание содержит десять вариантов. Номер темы и варианта студент определяет самостоятельно по своему условному индивидуальному шифру: тему по предпоследней цифре, а вариант по последней. При проведении установочных занятий тему может назначить преподаватель. 3 3. СОДЕРЖАНИЕ И РЕКОМЕНДУЕМАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ КУРСОВОЙ РАБОТЫ ЛИСТ 1. Проектирование схемы, структурный и кинематический анализ рычажного механизма 1. Спроектировать кинематическую схему плоского рычажного механизма, то есть определить недостающие размеры звеньев механизма графическим или аналитическим способом. 2. Начертить кинематическую схему механизма в одном из положений в произвольно выбранном масштабе. 3. Для двенадцати равноотстоящих положений начального звена построить соответствующие положения всех остальных звеньев, то есть построить планы положений механизма на одном чертеже. 4. Пронумеровать все положения, при этом за начало отсчета взять одно из крайних положений выходного (рабочего) звена. Если среди двенадцати построенных положений механизма не окажется положения, соответствующего второму крайнему положению рабочего звена, то его нужно достроить. 5. Начертить траектории геометрических центров кинематических пар. 6. Произвести структурный анализ механизма. Структурный анализ выполняется в пояснительной записке, при этом нужно решить следующие вопросы: подсчитать степень подвижности механизма; разложить механизм на группы с нулевой степенью подвижности (группы Ассура) и начальный механизм; определить класс и вид каждой группы; определить класс всего механизма; написать структурную формулу механизма. 7. Произвести кинематический анализ механизма методом построения планов скоростей и ускорений. По планам скоро4 стей и ускорений определить линейные скорости и ускорения всех характерных точек, а также значения и направления угловых скоростей и ускорений звеньев механизма. Результаты свести в таблицу. 8. Для точки выходного звена механизма построить три кинематические диаграммы: перемещения S=S(1); аналогов dS d 2S скоростей S ; аналогов ускорений S . 2 d1 d1 УКАЗАНИЯ: 1. При проведении структурного анализа степень подвижности механизма (число степеней свободы) W определить по формуле П.Л. Чебышева для плоских механизмов: W=3n – 2P5 – P4 + q, где n – число подвижных звеньев механизма; P5 и P4 – число кинематических пар соответственно пятого и четвертого классов (по классификации И.И. Артоболевского); q – число избыточных связей. 2. Масштабный коэффициент длины Kl определить по соотношению: l K l AB , АВ где lАВ – длина начального звена, м; АВ – длина отрезка, изображающего данное звено на чертеже, мм. Например: lАВ =0,5 м; АВ=50 мм, 0,5 тогда K l 0,01 м/мм. 50 3. При построении планов механизма одно (исследуемое) положение начертить линиями толщиной S, а остальные положения линиями толщиной примерно 0,5·S. 5 4. Планы скоростей и ускорений построить для одного положения механизма, соответствующего рабочему ходу. На планах показать направления векторов скоростей и ускорений всех характерных точек механизма (шарниров и центров тяжести звеньев). 5. Кинематические диаграммы S S 1 и S S 1 построить графическим дифференцированием по методу хорд. ЛИСТ 2. Силовой анализ рычажного механизма Силовое исследование произвести для положения механизма, исследованного ранее методом планов. 1. Начертить для исследуемого положения план механизма. 2. Перечертить с первого листа план ускорений для исследуемого положения. План ускорений необходим для определения величин и направлений главных векторов i и главных моментов Мфi сил инерции звеньев. 3. Определить главные векторы i и главные моменты инерции Мфi сил инерции звеньев механизма по формулам: Фi mi asi ; М фi J si i , где mi – масса звена i, кг; asi – ускорение центра тяжести Si звена i, м/с2; Jsi – момент инерции звена i относительно оси, проходящей через центр тяжести звена Si, кгм2. Знак «минус» в формулах показывает, что главный вектор силы Фi направлен противоположно вектору ускорения asi , а 6 главный момент M фi – противоположно направлению углового ускорения звена i . 4. Построить в масштабе диаграмму нагрузок (сил сопротивления, или движущих сил) в зависимости от перемещения рабочего звена. Вид диаграммы приведен в задании, где задано также максимальное значение силы (в металлорежущих станках это сила резания, являющаяся силой сопротивления FС, в двигателях внутреннего сгорания это сила давления газов на поршень, то есть движущая сила FД). Диаграмму построить в пояснительной записке. 5. Определить по построенной диаграмме силу сопротивления FС (или движущую силу FД) для исследуемого положения механизма. 6. Определить силы тяжести звеньев Gi по формуле: Gi=mig, где mi –масса звена i, кг; массы звеньев заданы или определяются по приведенной ниже формуле; g = 9,81 м/с2 – ускорение свободного падения. 7. Начертить группы Ассура в масштабе и в соответствующих точках приложить все внешние силы (силы тяжести звеньев Gi, силы производственного сопротивления FС или движущие FД), а также силы инерции Фi и моменты сил инерции Mфi. 8. Заменить связи каждой группы Ассура векторами соответствующих реакций в кинематических парах. Определить величины реакций в кинематических парах, используя составленные уравнения моментов сил, векторные уравнения сил и планы сил на основании равновесия групп Ассура. 7 9. Начертить в масштабе начальный механизм. 10. Определить уравновешивающую силу Fур, которая прикладывается перпендикулярно начальному звену, и силу (реакцию), действующую со стороны стойки на начальное звено. УКАЗАНИЯ: 1. Центры тяжести звеньев Si принять в центре тяжести фигур, их изображающих (за исключением случаев, когда их положение указано в заданиях). 2. Массы звеньев рычажного типа, если они не даны в заданиях, определить по приближенной формуле: mi=kli, где k – масса одного погонного метра звена; li – длина звена i, м; k = 8...12 кг/м – для шатунов; k = 10...20 кг/м – для коромысел; k = 20...30 кг/м – для кулис и кривошипов. 3. Массами кулисных камней и ползунов, не являющихся рабочими звеньями, пренебречь. 4. Массу поршней в двигателях и компрессорах определить по формуле: m=(0,5...0,7)mш, где mш – масса соединенного с данным поршнем шатуна, кг. 5. Массы долбяков поперечнострогальных и долбежных станков, а также массы главных ползунов прессов определить по формуле: m = (30...60)S, где S – ход долбяка (ползуна), м. 8 6. Моменты инерции звеньев относительно осей, проходящих через их центры тяжести, если они не даны в заданиях, определить по формулам: 2 m l J si i i – для кривошипа; 3 2 J si mi li – для всех остальных звеньев рычажного типа, 12 где mi – масса звена i, кг; li – длина звена i, м. 7. Силу производственного сопротивления FC приложить к выходному звену в его центре и направить противоположно движению звена в данный момент (направление движения выходного звена определить по плану скоростей для исследуемого положения). 8. Силы трения в кинематических парах механизма при силовом расчете не учитывать. 9. Уравновешивающую силу Fур определить двумя способами: методом планов сил и с помощью «жесткого рычага» Н.Е. Жуковского. Расхождение между двумя значениями уравновешивающей силы не должно превышать 10 %. 4. ОФОРМЛЕНИЕ ГРАФИЧЕСКОЙ ЧАСТИ РАБОТЫ 4.1. Графическую часть работы выполнить карандашом на двух листах формата А2 по ГОСТ 2.301–68*. 4.2. Графики, схемы, таблицы на чертежах должны иметь подписи, выполненные стандартным машиностроительным шрифтом по ГОСТ 2.304–81* с указанием масштабов или масштабных коэффициентов построений. 9 4.3. Основную подпись (угловой штамп) на чертежах работы выполнить в соответствии с формой 1 ГОСТ 2.104–2006, которая представлена в приложении 2. 4.4. Результаты структурного исследования оформить в пояснительной записке в виде таблицы, пример выполнения приведен на рисунке 1. 4.5. Содержание и примеры выполнения графической части листа 1 «Кинематическое исследование рычажного механизма» приведены на рисунках 2…4. На листе 1 должны быть начерчены: планы двенадцати положений механизма; план скоростей и план ускорений; три кинематические диаграммы. 4.6. Содержание и примеры выполнения графической части листа 2 «Силовой анализ рычажного механизма» приведены на рисунках 5…9. На листе 2 должны быть начерчены: план механизма для исследуемого положения; схемы групп Ассура и группы ведущего звена с изображениями векторов действующих на звенья группы сил; планы сил (силовые многоугольники) для каждой группы; схема рычага Жуковского. 10 11 Рис. 1. Структурное исследование рычажного механизма 11 Рис. 2. Планы положений механизма 12 Рис. 3. Планы скоростей и ускорений 13 Рис. 4. Кинематические диаграммы 14 Рис. 5. План механизма 15 Рис. 6. Силовой анализ группы Ассура 4–5 16 Рис. 7. Силовой анализ группы Ассура 2–3 17 Рис. 8. Силовой анализ начального механизма 18 Рис. 9. Рычаг Жуковского 19 5. ОФОРМЛЕНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ 5.1. Пояснительную записку оформить рукописным или печатным текстом в соответствии с ГОСТ 2.106–96*, при этом оставлять поля: слева для подшивки 20 мм, с трех других сторон по 5 мм. Текст располагать на одной стороне листов стандартной писчей бумаги формата А4 (210297 мм) по ГОСТ 2.105–95*. 5.2. Записка должна включать: титульный лист, задание, основной текст, список литературы, оглавление. Форма титульного листа приведена в приложении 3. План основного текста должен соответствовать последовательности выполнения разделов работы. Разделы должны иметь заголовки, обозначенные арабскими цифрами. 5.3. Основной текст записки должен содержать все расчеты, необходимые для выполнения работы, с соответствующими пояснениями и обоснованиями, иллюстрациями, таблицами. Текстовая часть должна ограничиваться лишь кратким объяснением расчетов со ссылками на графическое построение. Стиль изложения материала должен быть предельно точным, язык – строгим и простым. Изложение должно вестись от первого лица множественного числа. Например, нужно писать: принимаем, вычисляем и т.д. 5.4. Все расчетные формулы и уравнения записывать вначале в общем виде с перечнем и расшифровкой буквенных обозначений величин, размерностью. В случае повторения формулы в последующих разделах записки достаточно сослаться на страницу, где ранее была приведена эта формула. После записи и расшифровки формулы привести материал по выбору или определению всех величин, сделать числовую подстановку и дать ответ с размерностью. При выполнении аналогичных расчетов нужно изложить подробно расчет только один раз, а все последующие опустить и привести сводную таблицу полученных результатов. 20 5.5. Ссылки на литературные источники, встречающиеся в тексте записки, следует приводить в квадратных скобках в форме 1, с. 25, где первое число обозначает порядковый номер источника в списке литературы, приводимом в конце записки, второе – страницу в этом источнике, на которой приведена формула или цитируемый материал. 6. ОРГАНИЗАЦИЯ ЗАЩИТЫ КУРСОВОЙ РАБОТЫ Выполненная курсовая работа рецензируется преподавателем кафедры, после чего допускается к защите. На защите студент должен показать знания теории и общих методов проектирования и исследования механизмов, уметь обосновать целесообразность и правильность выбранных решений задач. При оценке контрольной работы учитывается качество выполнения графической части, грамотность оформления пояснительной записки и правильность ответов на вопросы. 7. ВОПРОСЫ ДЛЯ ПОДГОТОВКИ К ЗАЩИТЕ КУРСОВОЙ РАБОТЫ 7.1. Вопросы по листу 1 1. Расскажите о назначении рычажного механизма. Дайте названия и определения каждому звену. Подсчитайте количество кинематических пар в механизме. Определите степень подвижности механизма. 2. Сделайте структурный анализ рычажного механизма. Разделите механизм на группы Ассура и начальный механизм. Определите класс и вид каждой группы Ассура. Напишите структурную формулу механизма. 3. Как построить план положений механизма? Как определить масштабный коэффициент длины Кl ? 21 4. Расскажите, как построить план скоростей исследуемого механизма. Напишите векторные уравнения для построения планов скоростей. Расскажите, как, пользуясь планами скоростей, определить величины и направления угловых скоростей звеньев механизма. 5. Расскажите, как строятся планы ускорений. Напишите векторные уравнения для построения планов ускорений. Расскажите, как, пользуясь планами ускорений, определить величины и направления угловых ускорений звеньев механизма. 6. Как, используя метод подобия, определить векторы ускорений центров масс звеньев? 7. Как строятся кинематические диаграммы методом графического дифференцирования? Как вычислить масштабные коэффициенты диаграмм? 7.2. Вопросы по листу 2 1. Какие внешние силы действуют на звенья рычажного механизма? 2. Как свести задачу динамики к задаче статики при силовом анализе механизма? 3. Как определить силы тяжести звеньев? 4. Как определяются главные векторы и главные моменты сил инерции звеньев рычажного механизма? 5. Почему силовой расчет проводят, используя группы Ассура? 6. Как и в какой последовательности определяются реакции в группах Ассура второго класса? 7. Напишите векторное уравнение сил, действующих на звенья группы Ассура. Как определить реакции во внутренней кинематической паре группы Ассура? 8. Как определить уравновешивающую силу Fур? 9. Сформулируйте теорему Н.Е. Жуковского «О жестком рычаге». Что с помощью этой теоремы можно определить? 22 8. ТЕМЫ И ВАРИАНТЫ КУРСОВОЙ РАБОТЫ Тема 1. Вытяжной пресс (рис. 1, табл. 1) Рис. 1. Механизм вытяжного пресса: а – рычажный механизм перемещения ползуна с пуансоном; б – график изменения усилия вытяжки 23 24 Таблица 1 Исходные данные для расчета механизма вытяжного пресса Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Длина кривошипа 1 lОА, м 0,09 0,09 0,09 0,08 0,10 0,07 0,10 0,11 0,08 0,10 Длина шатуна 2 lАВ, м 0,38 0,29 0,40 0,26 0,45 0,23 0,43 0,36 0,36 0,32 Расстояние ВС lВC, м 0,26 0,27 0,28 0,24 0,30 0,21 0,29 0,33 0,25 0,30 Длина коромысла 3 lCD, м 0,37 0,38 0,39 0,34 0,44 0,30 0,42 0,47 0,35 0,42 Длина шатуна 4 lDF, м 0,09 0,10 0,10 0,09 0,11 0,08 0,10 0,12 0,09 0,11 Координаты центра вращения 0,13 0,14 0,14 0,13 0,15 0,11 0,15 0,17 0,12 0,16 коромысла а (в), м Внеосность с, м 0,35 0,37 0,37 0,33 0,41 0,29 0,39 0,45 0,33 0,41 Угловая скорость кривошипа 1 ω1, 1/с Масса звена 1 m1, кг 4,71 4,19 5,76 6,28 6,81 7,33 7,85 8,38 8,90 5,23 55 60 50 45 45 46 47 45 40 50 Масса звена 2 m2, кг 11 8 12 8 13 7 13 11 10 9 Масса звена 3 m3, кг 10 11 10 10 14 9 12 14 11 12 Масса звена 5 m5, кг 32 35 37 40 42 35 40 30 37 30 Максимальное усилие вытяжки (F5C)max, Н 24 (0,37) (0,26) (0,39) (0,23) (0,44) (0,20) (0,42) (0,32) (0,35) (0,29) 40000 38000 42000 40000 37000 32000 39000 45000 35000 36000 Тема 2. Поперечно-строгальный станок (рис. 2, табл. 2) Рис. 2. Механизм поперечно-строгального станка: а – кривошипно-кулисный механизм привода ползуна с резцовой головкой; б – диаграмма сил резания 25 26 Таблица 2 Исходные данные для расчета механизма поперечно-строгального станка Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Длина кривошипа 1 lAB, м 0,09 0,07 0,08 0,1 0,11 0,12 0,13 0,14 0,15 0,10 Расстояние между центрами lAC, м 0,35 0,30 0,27 0,30 0,27 0,35 0,27 0,40 0,50 0,35 Длина кулисы 3 lСD, м 0,49 0,56 0,49 0,68 0,41 0,56 0,52 0,56 0,60 0,75 Длина шатуна 4 lDE, м 0,23 0,25 0,24 0,25 0,22 0,24 0,26 0,28 0,30 0,20 Положение центра тяжести звена 3 S3 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Положение центра тяжести звена 4 S4 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Расстояние СЕХ lСЕХ, м 0,70 0,76 0,70 0,88 0,62 0,66 0,62 0,76 0,80 0,90 Угловая скорость кривошипа 11,1/с 14,6 9,42 12,5 10,47 8,9 7,85 6,28 8,37 9,42 11,5 Масса звена 4 m4, кг 7,0 6,0 7,0 6,0 7,0 7,0 8,0 9,0 9,0 6,0 Масса звена 3 m3,кг 15 18 15 20 15 15 18 18 19 20 Масса звена 5 m5,кг 45 55 45 60 45 45 55 55 60 60 2300 2400 2800 2300 2500 2400 1600 1700 1800 2500 Максимальная сила сопротивления F5С, Н 26 Тема 3. Долбежный станок с вращающейся кулисой (рис. 3, табл. 3) Рис. 3. Механизм долбежного станка: а – кривошипно-кулисный механизм перемещения долбяка; б – диаграмма сил резания 27 28 Таблица 3 Исходные данные для расчета механизма долбежного станка Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Коэффициент изменения средней скорости ползуна 5 KV Длина кривошипа lAB, м 1,25 1,3 1,4 1,5 1,6 1,75 1,8 2,0 2,25 2,5 0,10 0,11 0,12 0,13 0,14 0,10 0,15 0,12 0,16 0,14 Расстояние между центрами lAС, м 0,05 0,05 0,04 0,06 0,08 0,04 0,05 0,06 0,08 0,07 Отношение длины шатуна и левого плеча коромысла 43 = lDЕ / lCD Положение центра тяжести звена 4 S4 2,25 2,3 2,35 2,4 2,5 2,25 2,6 2,35 2,7 2,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Масса шатуна 4 m4, кг 5 5 6 5 6 4 6 5 7 5 Масса ползуна 5 m5, кг 30 35 34 32 35 25 40 32 42 35 Ход ползуна 5 Н, м 0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7 0,75 0,8 Угловая скорость кривошипа 1, 1/с 8,9 9,4 10,4 7,85 11,5 12,5 13,6 16,7 14,6 15,7 3800 3500 3400 3200 4000 2800 2800 2400 3000 2000 Максимальная сила сопротивления F5С, Н 28 Задание 4. Качающийся конвейер (рис. 4, табл. 4) Рис. 4. Механизм качающегося конвейера: а – рычажный механизм перемещения транспортирующего желоба 29 30 Таблица 4 Исходные данные для расчета механизма качающегося конвейера Варианты числовых значений Параметры 30 0 1 2 3 4 5 6 7 8 9 Длина кривошипа lOA, м 0,09 0,10 0,11 0,12 0,14 0,10 0,12 0,14 0,12 0,10 Длина шатуна lAB, м 0,38 0,46 0,42 0,46 0,28 0,45 0,55 0,53 0,45 0,38 Длина коромысла lBC, м 0,30 0,33 0,35 0,39 0,35 0,40 0,40 0,45 0,38 0,32 Длина шатуна lBD, м 1,40 1,50 1,40 1,50 1,60 1,50 1,50 1,60 1,50 1,30 Координаты центра вращения коромысла а (в), м Частота вращения кривошипа l n1, об/мин Масса шатуна m2, кг 0,30 (0,06) 0,34 (0,06) 0,32 (0,05) 0,33 (0,06) 0,32 (0,04) 0,35 (0,05) 0,41 (0,07) 0,40 (0,07) 0,35 (0,06) 0,29 (0,05) 60 68 73 70 63 63 79 74 50 80 16 17 18 18 20 18 18 20 18 18 Масса коромысла m3, кг 20 21 20 20 25 20 22 25 20 20 Масса шатуна m4, кг 80 90 100 85 100 90 95 100 90 90 Масса ползуна m5, кг 400 450 500 500 500 400 450 500 450 400 Сила полезного сопротивления F5С, кН 4,0 3,8 3,5 4,0 3,9 4,0 4,0 4,5 4,0 3,5 Задание 5. Вытяжной пресс (рис. 5, табл. 5) Рис. 5. Механизм вытяжного пресса: а – кривошипно-коромысловый механизм привода ползуна; б – диаграмма сил 31 32 Таблица 5 Исходные данные для расчета механизма вытяжного пресса Варианты числовых значений Параметры 1 2 3 4 5 Координаты центра вращения коро- 0,17 0,16 0,13 0,14 0,14 мысла (точка С) а (в), м (0,34) (0,35) (0,37) (0,51) (0,39) Длина кривошипа 1 l1, м 0,10 0,09 0,09 0,09 0,08 0,13 (0,6) 0,10 7 8 9 10 0,15 0,11 0,15 0,12 (0,31) (0,51) (0,42) (0,51) 0,07 0,10 0,11 0,08 Относительная длина шатуна 2=lAB / l1 4,0 4,2 4,6 5,0 4,8 4,5 4,2 4,3 3,8 4,5 Положение центра масс шатуна 2 S2 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Относительная длина коромысла 3 3,0 2,6 3,4 3,1 3,2 3,0 3,0 2,9 3,1 3,2 Относительная длина плеча СD CD 2,0 2,5 2,2 2,9 2,6 2,5 2,2 2.4 1,7 2,3 Относительная длина шатуна 4 4 0,5 1,0 1,1 1,1 1,5 1,1 1,1 1,0 0,7 0,8 Положение центра масс шатуна 4 S4 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Относительная внеосность Е = е / l1 2,0 2,2 2,1 2,2 2,3 2,0 2,1 2,0 2,1 1,8 Угловая скорость кривошипа 1, 1/с 7.5 7,5 7,5 7,5 7,5 7,5 7,5 7,5 7,5 7,5 4000 3800 4200 4000 3700 3200 3900 4500 3500 3600 Сила полезного сопротивления F5С, Н 32 6 Задание 6. Долбежный станок с качающейся кулисой (рис. 6, табл. 6) Рис. 6. Механизм долбежного станка: а – кривошипно-кулисный механизм перемещения долбяка; б – диаграмма сил резания 33 34 Таблица 6 Исходные данные для расчета механизма долбежного станка Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 1,8 1,7 1,6 1,9 2,0 2,1 2,2 2,3 2,4 2,5 Ход ползуна 5 Н5, м 0,2 0,3 0,17 0,15 0,12 0,18 0,14 0,25 0,22 0,24 Расстояние между центрами lАС, м 0,15 0,2 0,25 0,3 0,35 0,4 0,35 0,3 0,25 0,2 35 35 35 35 35 35 35 35 35 35 0,4 0,3 0,5 0,3 0,4 0,35 0,4 0,3 0,5 0,3 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 Масса звена 5 m5, кг 45 32 35 38 40 30 32 35 38 40 Масса звена 4 m4, кг 6,0 5,0 7,0 5,0 6,0 5,5 6,0 5,0 7,0 5,0 Коэффициент изменения средней скорости ползуна 5 при холостом ходе KV Конструктивный угол , град Отношение длины шатуна 4 lDЕ к длине lСD звена 3 43 Положение центра тяжести звена 4 S4 34 Угловая скорость кривошипа 11, 1/c 15,00 15,71 14,66 13,61 12,57 11,52 11,47 9,42 8,37 7,85 Сила полезного сопротивления, F5С, Н 2000 2700 2800 2900 2100 2200 2300 2400 2500 2600 Задание 7. Пресс-автомат для холодного выдавливания (рис. 7, табл. 7) Рис. 7. Механизм пресс-автомата: а – кривошипно-коленный механизм привода пуансона; б – график изменения усилия 35 36 Таблица 7 Исходные данные для расчета механизма пресс-автомата Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Длина кривошипа lAB, м 0,09 0,11 0,10 0,12 0,08 0,11 0,12 0,10 0,10 0,12 Длина шатуна lВC, м 0,43 0,41 0,48 0,43 0,38 0,48 0,44 0,44 0,37 0,52 Длины шатунов lСD = lСE, м 0,25 0,29 0,28 0,30 0,22 0,28 0,31 0,26 0,26 0,31 Координаты центра вращения коромысла (точка D) а (в), м Частота вращения кривошипа l n1, об/мин Масса кривошипа m1, кг 36 0,25 0,29 0,28 0,30 0,22 0,28 0,31 0,26 0,26 0,31 (0,34) (0,30) (0,38) (0,31) (0,30) (0,37) (0,32) (0,34) (0,27) (0,40) 100 90 110 120 130 80 85 95 140 90 50 55 60 45 40 55 60 50 45 55 Масса шатуна m2, кг 11 10 12 10 9 12 11 11 9 13 Масса коромысла m3, кг 15 17 16 20 13 18 19 16 16 18 Масса шатуна m4, кг 15 17 16 20 13 18 19 16 16 18 Масса ползуна m5, кг 60 62 56 70 46 65 67 57 58 63 Сила полезного сопротивления F5С, кН 60 65 70 58 55 52 53 54 60 70 Задание 8. Строгальный станок (рис. 8, табл. 8) Рис. 8. Механизм строгального станка: а – кривошипно-кулисный механизм привода ползуна с резцовой головкой; б – диаграмма сил резания 37 38 Таблица 8 Исходные данные для расчета механизма строгального станка Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 0,8 0,7 0,6 0,9 1,0 1,1 1,2 0,6 0,75 0,5 2,0 2,2 2,1 2,3 1,9 2,0 1,9 2,0 1,5 1,7 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 2,25 2,0 1,8 1,75 1,5 1,25 2,5 2,2 1,9 2,5 Угловая скорость звена 1 1, рад/с 15,2 15,2 15,2 15,2 15,2 15,2 15,2 15,2 15,2 15,2 Сила полезного сопротивления F5C, Н 1500 1600 1700 1800 1900 2000 2100 2200 2300 2400 Максимальное перемещение ползуна 5 (HF)max, м Относительное смещение направляющей ползуна 5 и оси вращения кривошипа 1 е=е/l1 Относительное положение центра масс S3 на кулисе 3 S3=lS3D / l3 Коэффициент изменения средней скорости ползуна 5 КV 38 Задание 9. Шаговый транспортер автоматической линии (рис. 9, табл. 9) Рис. 9. Механизм шагового транспортера: а – рычажный механизм привода транспортера; б – диаграмма изменения сил сопротивления на штанге 39 40 Таблица 9 Исходные данные для расчета механизма шагового транспортера Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Длина кривошипа lAB, м 0,12 0,07 0,07 0,08 0,09 0,09 0,10 0,10 0,11 0,09 Расстояние между центрами lAC, м 0,27 0,35 0,30 0,27 0,30 0,27 0,35 0,27 0,35 0,30 Длина коромысла lСD,м 0,49 0,64 0,56 0,49 0,56 0,64 0,49 0,64 0,56 0,49 0,25 0,34 0,30 0,25 0,30 0,32 0,25 0,34 0,30 0,25 Масса звена 3 m3,кг 18 20 19 18 19 19 18 20 19 18 Масса звена 5 m5,кг 40 60 50 40 50 40 60 50 40 50 15,7 14,6 13,6 11,5 10,4 9,42 12,5 8,37 10,4 12,5 3800 3600 3400 3200 3000 2800 2600 2500 2400 2300 Положение центра тяжести коромысла lCS3,м Угловая скорость кривошипа 11,1/с Сила сопротивления, приложенная к звену 5 F5С,Н 40 Задание 10. Поршневой насос с двойной качающейся кулисой (рис. 10, табл. 10) Рис. 10. Механизмы поршневого насоса: а – кривошипно-кулисный механизм перемещения поршня; б – циклограмма механизма 41 42 Таблица 10 Исходные данные для расчета механизма поршневого насоса Варианты числовых значений Параметры 1 2 3 4 5 6 7 8 9 10 Длина кривошипа lAB, м 0,12 0,07 0,07 0,08 0,09 0,09 0,10 0,10 0,11 0,09 Расстояние между центрами lAC , м 0,27 0,35 0,30 0,27 0,30 0,27 0,35 0,27 0,35 0,30 Длина большего плеча коромысла lCК , м 0,42 0,45 0,40 0,38 0,42 0,39 0,48 0,40 0,49 0,42 Длина меньшего плеча коромысла lСF, м 0,23 0,11 0,11 0,13 0,14 0,15 0,15 0,17 0,22 0,14 Внеосность а, м 0,12 0,07 0,07 0,08 0,09 0,09 0,10 0,10 0,11 0,09 / 13 14 12 12 13 12 15 12 15 13 // Масса меньшего плеча звена 3 m 3, кг 6,8 3,3 3,3 4,0 4,2 4,5 4,5 5,1 6,6 4,2 Масса звена 5 m5, кг 20 18 16 16 17 17 20 17 22 17 0,43 0,34 0,40 0,36 0,24 0,27 0,75 0,22 0,26 0,25 Масса большего плеча звена 3 m 3, кг Максимальное давление на поршень при рабочем ходе Рmax, Н 42 Диаметр поршня d, м 0,140 0,145 0,150 0,155 0,160 0,130 0,135 0,140 0,145 0,150 Угловая скорость кривошипа 11, 1/с 20,25 19,73 13,47 7,843 10,53 8,257 18,75 10,47 25,60 28,18 СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ 1. Крайнев, А.Ф. Словарь-справочник по механизмам / А.Ф. Крайнев. – М.: Машиностроение 1981. – 438 с. 2. Артоболевский, И.И. Теория механизмов и машин / И.И. Артоболевский. – М.: Наука, 1988. – 604 с. 3. Артоболевский, И.И. Сборник задач по теории механизмов и машин / И.И. Артоболевский, Б.В. Эдельштейн. – М.: Наука, 1975. – 256 с. 4. Машнев, М.М. Теория механизмов и машин и детали машин / М.М. Машнев. – Л.: Машиностроение, 1980. – 512 c. 5. Теория механизмов и машин / Под ред. К.В. Фролова. – М.: Высшая школа, 1987. – 496 с., ил. 6. Попов, С.А. Курсовое проектирование по теории механизмов и механике машин / Под ред. К.В. Фролова. – М.: Высшая школа, 1986. – 295 с., ил. 7. Курсовое проектирование по теории механизмов и машин / Под ред. А.С. Кореняко. – Киев: Вища школа, 1970. – 332 с. 8. Курсовое проектирование по теории механизмов и машин / Под общей ред. Г.Н. Девойно. – Минск: Высшая школа, 1986. – 285 с., ил. 9. Теория механизмов и механика машин: Рекомендовано УМО Российской Федерации по образованию в области строительства в качестве учебного пособия для студентов механических специальностей / Г.Г. Волокитин, Н.И. Кузьменко, В.Ф. Филиппов; под ред. В.Ф. Филиппова. – Томск: Изд-во Том. гос. архит.-строит. ун-та, 2003. – 360 с. 43 Приложение 1 Рис. 1. Основная надпись для чертежей и схем. Форма 1 Рис. 2. Основная надпись для текстовых конструкторских документов (первый или заглавный лист). Форма 2 Рис. 3. Основная надпись для текстовых конструкторских документов (последующие листы). Форма 2а 44 Приложение 2 Оформление титульного листа пояснительной записки 45 Оглавление 1. ЦЕЛЬ И ЗАДАЧИ............................................................... 2. ОБЪЕМ КУРСОВОЙ РАБОТЫ, ВЫБОР ТЕМЫ И ВАРИАНТА............................................. 3. СОДЕРЖАНИЕ И РЕКОМЕНДУЕМАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ КУРСОВОЙ РАБОТЫ........................................................... 4. ОФОРМЛЕНИЕ ГРАФИЧЕСКОЙ ЧАСТИ РАБОТЫ.................................................................................. 5. ОФОРМЛЕНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ............................................................................... 6. ОРГАНИЗАЦИЯ ЗАЩИТЫ КУРСОВОЙ РАБОТЫ.................................................................................. 7. ВОПРОСЫ ДЛЯ ПОДГОТОВКИ К ЗАЩИТЕ КУРСОВОЙ РАБОТЫ........................................................... 8. ТЕМЫ И ВАРИАНТЫ КУРСОВОЙ РАБОТЫ.................................................................................. СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ................... Приложение 1............................................................................ Приложение 2............................................................................ 46 3 3 4 9 20 21 21 23 43 44 45