С этого номера мы начинаем публикацию серии статей о фотограмметрии –... науке, начавшей свой путь около 160-ти ...
реклама

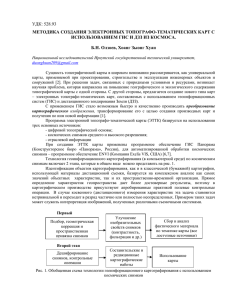
С этого номера мы начинаем публикацию серии статей о фотограмметрии – сравнительно молодой науке, начавшей свой путь около 160-ти лет назад и стремительно развивающейся с открытием средств и методов получения, измерения изображений и появлением летательных аппаратов. Фотограмметрия синтезировала в своих методах и приборах достижения физики и химии, авиации и космонавтики, оптики и электроники, математики и точной механики, геодезии и картографии. Новый виток развития получила наука в последнюю четверть истекшего столетия, связанный с появлением и массовым внедрением персональных ЭВМ, средств получения, хранения и обработки цифровых изображений, методов машинного зрения и распознавания образов. Публикация статей по современной фотограмметрии представляется целесообразной по ряду причин, основными из которых являются следующие. В первой половине 1980-х годов прошлого столетия появились цифровые фотограмметрические системы (ЦФС), характеризующиеся максимально возможной автоматизацией отдельных процессов, в том числе отождествления точек на смежных снимках, построения цифровой модели рельефа и интерполяция горизонталей, ортотрансформирование, и т. п. Все это не могло не снизить требований к профессиональной подготовке исполнителей. К настоящему времени производственные организации соответствующего профиля практически завершили свое техническое перевооружение, демонтировав дорогостоящие универсальные стереофотограмметрические приборы отечественного и зарубежного производства и заменив их цифровыми фотограмметрическими системами. Причем, техническая документация цифровых фотограмметрических систем не содержит описания алгоритмов, поскольку зачастую они являются «ноу-хау» разработчиков. Это обстоятельство и почти повсеместное отсутствие современной научной, технической и учебной литературы и привело к необходимости публикаций, в которых были бы просто и в доступной форме изложены основные вопросы теории аналитической фотограмметрии, а также основные методы цифровой фотограмметрии. При подготовке статей не ставилась цель привести конкретные алгоритмы, используемые цифровыми фотограмметрическими системами для решения тех или иных задач. Их цель – познакомить читателя с основными принципами обработки снимков средствами современной цифровой фотограмметрии, получить формулы и изложить приемы, с помощью которых могут быть решены основные задачи фотограмметрии средствами ЦФС. В планируемой серии публикаций мы предполагаем познакомить Вас с характеристиками современных аналоговых и цифровых снимков, способами их наблюдений и измерений в компьютерных системах, а также основными этапами их обработки – внутренним, взаимным, внешним ориентированием, способами уравнивания фотограмметрических построений, и изготовления выходной продукции – цифровых моделей рельефа, формирования ортоизображения, и т.д. Материалы ориентированы на специалистов производства, занятых подготовкой топографического обеспечения геоинформационных систем, а также студентов, обучающихся по топографо-геодезической, картографической, землеустроительной и географической специальности. Они могут быть полезны при планировании и выполнении фотограмметрических работ, при проведении технической учебы и повышении квалификации, и др. Тексты статей подготовлены главным научным сотрудником УП «БелНИЦзем», доктором технических наук В.Ю. Минько и доцентом Белорусского государственного университета, кандидатом технических наук А.С. Назаровым. ЦИФРОВЫЕ, АНАЛОГОВЫЕ СНИМКИ МЕСТНОСТИ И ИХ ИЗМЕРЕНИЕ А.С. НАЗАРОВ, к.т.н, БГУ, г. Минск 1. НЕМНОГО ИСТОРИИ Фотограмметрия1 научная дисциплина, изучающая способы определения формы, размеров и пространственного положения объектов в заданной координатной системе по их фотографическим и иным изображениям. Фотограмметрия выделилась из геодезии в начале прошлого столетия благодаря применению новых начал измерительной техники, основанных на способности объектива строить изображения объектов, возможности регистрации этого изображения фотохимическими методами и измерения его с помощью оптических, механических или электронных приборов и инструментов. Начав 1 Термин Photogrammetrie является производным от греческих слов phōtos – свет, gramma – запись и metreō – измерение; дословно – измерение светозаписи. По одним данным этот термин был введен в 1855 г. Карстеном, а по другим – в 1867 г. Мейденбауэром. свою историю с решения топографических задач, фотограмметрия на протяжении полутора веков развивалась, главным образом, под влиянием требований картографии и являющейся и в настоящее время основной отраслью науки и техники, в которой снимки используются в огромном количестве и с наибольшей полнотой. Зарождение фотограмметрии связывается с открытием фотографии, когда на заседании Парижской академии наук и Академии изящных искусств 7.01.1839 года французским астрономом и физиком Д.Ф. Араго было сделано сообщение об изобретении парижским художником Луи Жаком Манде Дагером способа получения изображения на слое галоидного серебра. Первым, указавшим на возможность применения таких фотоснимков местности для целей топографии, и применившим ее в 1852 году при составлении плана, был французский военный инженер подполковник Эмэ Лосседа. Спустя три года, в 1855 году, французский фотограф Феликс Турнашон (Надар) получил первые в истории человечества снимки улиц Парижа с аэростата. В конце 1850-х годов Эмэ Лосседа сконструировал специальный прибор для получения фотоснимков (прообраз фототеодолита), разработал приемы составления планов по наземным фотоснимкам, выполнил фотографическую съемку Парижа с высоких зданий и изготовил по ним топографический план, точность которого превосходила точность геодезического метода. Вклад Эмэ Лосседа в развитие зарождающейся науки оказался столь значительным, что некоторые специалисты называют его отцом фотограмметрии. Отсутствие эффективных технических средств получения фотоснимков и несовершенство применяемой в то время технологии получения светочувствительных слоев не способствовали развитию этой науки, и до конца столетия отмечаются лишь эпизодические попытки ее использования для составления планов местности в Италии, Германии, Канаде, Австрии, России и т.д. В России методы фотограмметрии начали применять только в конце XIX века, при производстве изысканий для строительства железных дорог на Кавказе (Н.О. Вильнер, 1891 г.) и в Забайкалье (П.И. Щуров, Р.Юл. Тиле, 1897 г.); для съемок на Новой Земле (Ф.Н. Чернышев, Б.Б. Голицын, 1895 – 1896 гг.), и т.д. Первые воздушные снимки в России были получены 18 мая 1886 года командиром военно-воздухоплавательной части Рис. 1. Один из снимков, полученных с воздушного шара поручиком А.М. Кованько (рис. 1). поручиком А.М. Кованько (Санкт-Петербург, дворцовая Среди появившихся в последующие годы идей и площадь и Васильевский остров, высота 800 м) разработок, пожалуй, наиболее весомыми, определившими все дальнейшее развитие фотограмметрии, являются: • принципы стереофотограмметрического метода на основе использования стереоскопической модели местности (Штольце, 1892 г.); • формулировка условия взаимного ориентирования пары снимков (С. Финстервальдер, 1899 г.); • разработка способов измерения снимков и модели с использованием мнимой (Пульфрих, 1899 г.) и действительной (Девиль, 1901 г.) марки; • создание стереокомпаратора (Пульфрих, 1901 г.), конструкция которого не претерпела принципиальных изменений до настоящего времени; • разработка метода преобразования снимков с изображением сложного рельефа (Шеймпфлюг, 1903 г.), основополагающие принципы которого применяется и поныне. Однако подлинно революционное значение для развития фотограмметрии имело появление авиации и ее практическое применение для получения фотоснимков. За сравнительно короткий, по историческим меркам, период усилиями крупнейших ученых-фотограмметристов выполнена разработка: • общих принципов фотограмметрического сгущения съемочного обоснования (С. Финстервальдер, 1926 г.), успешно развитых в процессе соответствующих опытных работ (К. Ашенбреннер, 1926 г., Н.М. Алексапольский и Ф.В. Дробышев, 1928 г.); • аналитического решения задачи взаимного ориентирования пары снимков (А.С. Скиридов, 1928 г.) -- основного процесса фотограмметрической обработки снимков; комбинированного метода аэрофототопографической съемки (Н.М. Алексапольский, 1923–1928 гг.), предполагающего получение контурной части топографического плана по материалам аэрофотосъемки, а высотной части – в результате полевых работ; • дифференцированного метода стереотопографической съемки (А.С. Скиридов, Г.В. Романовский, М.Д. Коншин, Н.М. Алексапольский, Г.П. Жуков, Ф.В. Дробышев, и др., 1930–1936 гг.), основанного на раздельном получении контурной и высотной части топографического плана по материалам аэрофотосъемки; • метода обработки снимков с преобразованными связками проектирующих лучей (М.Д. Коншин, Г.В. Романовский, А.Н. Лобанов, Ф.В. Дробышев, Г.П. Жуков, и др., 1940–1947 гг.) и реализующих его высокоточных приборов. Практическое применение перечисленных методов опиралось на аналоговые фотограмметрические приборы – фототрансформаторы, стереокомпараторы, стереометры, а позднее – и стереографы, стереопроекторы, и другие, в которых преобразование фотоснимков выполнялось оптическим, механическим или оптико-механическим путем. Серийный выпуск этих приборов обеспечил выполнение задач как топографического, так и нетопографического (инженерного) характера. Создание аналитических фотограмметрических приборов стало возможным только в 60–80-е годы прошлого столетия, с появлением микропроцессорной техники. В этих приборах обработка фотоснимков выполнялась уже аналитическим путем, на основе соответствующих математических зависимостей. К этому времени благодаря трудам С. Финстервальдера и Р. Финстервальдера, А.С. Скиридова и Н.Г. Келля, Е. Мерритта и Х. Шмидта, Н.А. Урмаева и А.Н. Лобанова, И.Т. Антипова и Б.К. Малявского, Б. Халлерта и Ф. Акермана, и других основные методы аналитической фотограмметрии были уже сформулированы и ожидали появления вычислительных средств. В современной фотограмметрии развиваются и массово внедряются методы цифровой обработки изображений, которые получены путем сканирования аналоговых снимков или непосредственно в процессе съемки. Цифровая фотограмметрия, как теперь ее называют, представляет собой реализованные в компьютерных программах способы обработки изображений, базирующиеся, как на фундаменте, на аналитических методах обработки снимков. При этом методы обработки изображений используют достижения теории компьютерного зрения и машинной графики, распознавания образов и преобразования изображений, цифровой фильтрации и теории сигналов, вычислительной геометрии и теории информации, теория вероятности и математической статистики, операционных методов и теория связи, и др. оставаясь при этом невидимыми для пользователя. • 2. ИЗОБРАЖЕНИЯ И ИХ ОСНОВНЫЕ ХАРАКТЕРИСТИКИ Обрабатываемые методами фотограмметрии изображения могут быть представлены в различных формах, в зависимости от способа их получения, принятой модели и структуры данных (рис. 2). Изображе6ние объекта Форма пре дставления Аналоговая Цифровая Модель данных Векторная С т р у к т у р а Цепочно-узловая Растровая д а н н ы х Матричная Объектно-ориентированная Рис. 2. Способы представления изображений Аналоговая форма представления изображения объектов используется с незапамятных времен и предполагает получение его каким-либо образом на физическом носителе – на бумаге, фотобумаге, фотопленке и др. Во многих случаях аналоговая форма и сегодня является основной, особенно там, где важна юридическая значимость изображения, либо если оно необходимо для использования в нестационарных условиях. Фотографируя местность получают изображение в виде аэронегатива или обратного ему позитивного отпечатка, полученного с аэронегатива фотографическим путем, который характеризуется более четким отображением как оптических плотностей элементов местности, так и взаимного положения объектов и их частей. И негативное и позитивное изображения (далее – аэроснимок) строятся по законам центрального проектирования, причем, центр проекции совмещен с передней узловой точкой объектива (оптической системы), а картинная плоскость – с плоскостью прикладной рамки аэрокамеры. Положение точек аэроснимка определяется в системе координат oxy (рис. 3) с началом точке o пересечения главной оптической оси объектива с плоскостью прикладной рамки аэрокамеры. Направления координатных осей ox и oy задаются в процессе калибровки аэрокамеры y и фиксируются на снимках четырьмя механическими или четырьмя–восьмью оптическими координатными метками. Аналоговое изображение характеризуется форматом кадра, величиной фокусного o x расстояния объектива аэрокамеры, а также погрешностями, возникающими как при его построении с помощью объектива, так и при фиксации на светочувствительном слое. Основными из них, не без оснований, считают разрешающую способность системы Рис. 3. Система объектив–негатив и величину некомпенсируемой дисторсии. Для решения задач, координат снимка связанных с дешифрированием изображение, большое значение имеют параметры светочувствительности и цветочувствительности фотопленки, или ее тип. Современные аэрофотоаппараты имеют формат кадра 23×23, 30×30 или 18×18 см. Они оснащены специальными устройствами, обеспечивающими: автоматическое регулирование экспозиции, измерение контрастности изображения и компенсацию его сдвига, впечатывание в кадр сенситометрического клина и навигационных данных, смену светофильтров, автоматическое вычисление интервалов между экспозициями, индикацию снимаемого ландшафта на мониторе и др. Основные технические характеристики некоторых современных аэрофотоаппаратов приведены в табл. 1. Цифровая форма изображения возникла вместе с электронными вычислительными машинами и используется для представления изображения в памяти ЭВМ и на Таблица 1 Фокусное Разрешающая Остаточная магнитных носителях. Тип АФА, расстояние, способность дисторсия, Векторная форма цифрового страна-изготовитель мм линий, мм мкм изображения предполагает представление АФА ТЭС-10М (РФ) 100 33 10 его с помощью набора примитивов и их АФА ТЭ-50 (РФ) 500 35 10 комбинаций – точек, векторов, граней, 350 35 – 80 20 ребер и т. п. Эта форма широко ТК-350 (РФ) АТ-204 (РБ) 150, 300 50 – 100 3 используется в цифровой картографии и RC Wild/Leica (Швейцария) 153, 305 120 – 107 2 предполагает, что положение точек изображения задано в некоторой координатной системе, выбираемой пользователем в зависимости от характера решаемых задач. Элементы векторного изображения представляются в одной из двух структур (рис. 2), различающихся принципом формирования и описания его элементов, способом доступа к ним, характером связи с окружающими элементами и др. Рассматриваемая форма цифрового представления в фотограмметрии не является основной, а используется для представления конечных результатов. Растровая форма цифрового изображения предполагает представление его в виде некоторой матрицы (рис. 4), соответствующей плоскости исходного изображения и состоящей из квадратных ячеек одинакового размера, являющихся наименьшими адресуемыми элементами. Каждый такой элемент, называемый п и к с е л о м ( п и к с е л е м ) , соответствует определенному участку исходного изображения и характеризуется набором оптических параметров – цветом, плотностью, яркостью (интенсивностью) и т. п. Примерами растрового изображения являются: фотоснимок, состоящий из совокупности очувствленных зерен галоидного серебра; газетное клише, воспринимаемое как совокупность отдельных точек, и др. Наиболее распространенной, но далеко не единственной, структурой растрового представления является матричная. Доступ к элементам растрового изображения (пикселам) осуществляется по oP xP номерам строк и столбцов. Начало oP внутренней прямоугольной координатной системы совмещено с первым элементом первой строки изображения, ось абсцисс xP – с первой строкой, а ось ординат yP – с первым столбцом (см. рис. 4). Никакой информации о размещении матрицы в пространстве (в системе координат местности) в yP растровом файле, за редким исключением, нет. Рис. 4. Система В фотограмметрии под цифровым изображением понимают его растровую форму, координат растра полученную непосредственно в процессе съемки с помощью цифровой камеры, либо путем сканирования аэронегатива. Растровое изображение характеризует его геометрическое и радиометрическое разрешение. Геометрическое разрешение цифрового изображения определяет линейный размер пиксела и представляется либо его линейной величиной (в метрах, если размер отнесен к местности, или в мкм, если речь идет о снимке), или числом точек на дюйм (dpi). Величина геометрического разрешения определяет качество изображения, точность вычислительной обработки, возможности увеличения и др. В соответствии с требованиями действующей инструкции по фотограмметрическим работам его размер определяют, в зависимости от назначения цифровых снимков, с учетом нескольких критериев, в частности [2]: • требуемой точности определения плановых координат точек фотограмметрического сгущения: PXY = 0,5VS M m = 0,5VS K t ; (1) • требуемой точности определения высот точек фотограмметрического сгущения: PZ = 0,5f VZ (bm) ; (2) • сохранения разрешающей способности исходного снимка (изображения): PR = 0,4 R ; (3) • обеспечения требуемого разрешения графических фотопланов (ортофотопланов) PP = 70M m = 70 Kt , (4) где M, m – знаменатели масштабов создаваемого плана и аэроснимка; VS, VZ – требуемая точность определения плановых координат и высот точек (м); R – разрешающая способность исходного снимка (мм-1 ); f, b – фокусное расстояние съемочной камеры и базис фотографирования в масштабе снимка (мм). При M = 2000, m = 10000, f = 100 мм, b = 70 мм, R = 40 мм-1, сечении рельефа h = 1,0 м будем иметь: PXY = 0,5×0,2/5 = 0,02 мм = 20 мкм; PZ = 0,5×100×0,2 × 1000/(70×10000)=0,014 мм =14 мкм; PR = 0,4/40=0,01 мм = 10 мкм; PP =70/5=0,014 мм = 14 мкм. Если цифровые снимки создаются для фотограмметрического сгущения в плане и по высоте изготовления ортофотопланов и при этом нужно сохранить разрешающую способность исходных материалов, то сканировать нужно с разрешением 10 мкм, или 25600/10 = 2600 dpi. Заметим, что теоретически возможная разрешающая способность аэронегативов и объективов достигает 350–400 линий на миллиметр (порядка 1,5–2,0 мкм), что соответствует суммарной разрешающей способности изображения порядка 4–5 мкм. Практически она в два – три и более раза ниже (см. табл. 1). Радиометрическая характеристика определяет число уровней квантования яркости исходного изображения (бинарное, многоградиентное), фотометрическое содержание элемента изображения (одноцветное, полутоновое, цветное, спектрозональное) и обозначаются числом бит на пиксел. Для обозначения плотности (степени потемнения) элемента изображения весь диапазон полутонов от белого до черного делится на 2n частей (2, 4, 8, …, 256, …), называемых уровнями квантования. При формировании бинарного (черно-белого) изображения используется всего два уровня квантования, и в нем представлены только белый и черный цвета. В полутоновом изображении используется 256 уровней квантования, для представления которых в описании элемента изображения резервируется 8 бит (1 байт). Черному цвету всегда соответствует уровень 0, а белому – уровень 1 бинарного изображения и уровень 255 полутонового. Цветное изображение формируется с использованием той или иной палитры (RGB, CMYK, и др.), в которых цвета и их оттенки создаются путем смешивания трех основных цветов в пропорциях, соответствующих уровням их квантования. Палитра RGB – наиболее распространенная, предполагающая использование трех основных цветов: красного (Red), зеленого (Green) и синего (Blue). Так, сочетание красного цвета с зеленым одинаковой интенсивности дает желтый цвет; зеленого с синим – голубой; синего с красным – оранжевый, а всех трех цветов – белый. Палитра CMYK обеспечивает более качественную передачу оттенков при смешивании четырех цветов: голубого (Cyan), сиреневого (Magenta), желтого (Yellow) и черного (Black). Палитра CMYK находит широкое применение в издательских системах. В связи с этим для представления одного элемента бинарного изображения необходим 1 бит; полутонового с 256 уровнями квантования – 8 бит (1 байт), а цветного с тем же числом уровней квантования по каждому каналу – 24 бита (3 байта) при использовании палитры RGB или 32 бита (4 байта) палитры CMYK. 3. ПОЛУЧЕНИЕ РАСТРОВЫХ ИЗОБРАЖЕНИЙ И ИХ ПРЕОБРАЗОВАНИЕ Цифровые изображения получают двумя способами, один из которых предполагает сканирование аналоговых фотоснимков (аэронегативов), полученных в процессе аэрофотосъемки, а второй – использование цифровых съемочных систем (сенсоров) непосредственно в процессе съемки. В обоих случаях цифровое изображение формируется с помощью либо фотодиодов, либо приемников с зарядовой связью (ПЗС) в форме ПЗС-матрицы или ПЗС-линейки с примерно одинаковыми техническими возможностями. Применение ПЗС-матрицы предполагает формирование всего кадра изображения по схеме, аналогичной фотокамере, где в фокальной плоскости вместо фотопленки располагается ПЗСматрица. Применение ПЗС-линейки предполагает сканирование местности или изображения параллельными маршрутами с шагом, равным размеру элемента геометрического разрешения. Сканирование фотоснимков выполняется с помощью оптико-электронных приборов-сканеров, которые по принципу исполнения можно разделить на роликовые, планшетные и барабанные, а по точности и назначению – на офисные и фотограмметрические. Роликовые сканеры имеют малый формат, неподвижную считывающую головку и низкую точность. Планшетные сканеры – более точные, но низкоскоростные; столбцы и строки изображения задаются перемещениями источника света и считывающей головки. Барабанные сканеры не без оснований считаются наиболее точными; строки формируемого изображения задаются вращением барабана, а столбцы – перемещением считывающей головки. Офисные сканеры характеризуются относительно низким геометрическим разрешением (от 10 мкм с использованием фотодиодов до 100 мкм на основе ПЗС-линеек), существенными геометрическими ошибками положения элементов растра и используются для сканирования фотоснимков только в исключительных случаях. Фотограмметрические сканеры характеризуются высоким геометрическим разрешением (менее 10 мкм) и высокой геометрической точностью, которая определяется величиной ошибки сканирования и повторяемостью (изменением ошибки в десяти сканированиях). Технические характеристики некоторых наиболее распространенных фотограмметрических сканеров приведены в табл. 3.1; наличие 24-х уровней квантования обеспечивает получение цветного изображения (3 канала по 8 бит). Таблица 2 Наименование характеристики Размер снимка, мм Размер пиксела, мкм Ошибка сканирования, мкм Число уровней квантования. бит Характеристика фотограмметрического сканера ОАО «Пеленг», РБ 300×400 5 ±2 3×8 = 24 «Дельта», Украина СКФ-11, Россия DSW500 LH System 300×450 8 – 128 ±3 3×8 = 24 300×300 8 ±3 3×8 = 24 260×260 9 ±2 1×10 Некоторые фотограмметрические сканеры (например, «Дельта», и др.) предусматривают возможность сканирования аэронегативов с неразрезанного аэрофильма, как это практикуется в фотограмметрическом производстве. Затраты времени на сканирование характеризуются следующими данными для сканера «Дельта» (рис. 5): черно-белый снимок формата 23×23 см с геометрическим разрешением 8 мкм сканируется за 12 минут, а с геометрическим разрешением 30 мкм – за 4 минуты. Для получения цветного растрового изображения того же формата и с той же геометрической точностью требуется 30 и 9 минут соответственно. Важнейшим элементом формирования цифрового изображения является эталонирование сканера, особенно в случае, если он не Рис. 5. Фотограмметрический сканер является фотограмметрическим. Сущность эталонирования «Дельта» (Украина) заключается в сканировании контрольной сетки с нанесенными на нее горизонтальными и вертикальными штрихами, расстояния между которыми известны с точностью 1–2 мкм. На полученном изображении измеряют «пиксельные» координаты xP, yP крестов контрольной сетки в системе oPxPyP (рис. 4), преобразуют их в линейную меру с учетом заданного геометрического разрешения и сравнивают полученные значения с точными координатами, отсчитанными по контрольной сетке. По найденным разностям координат соответствующих точек строят поле искажений, характеризующее все виды геометрических искажений, вносимых сканером в той или иной точке поля сканирования. В последующем, изображения, полученные с помощью этого сканера, могут быть исправлены в соответствии с параметрами поля искажений. Имеющиеся публикации свидетельствуют, что таким образом искажения фотограмметрического сканера можно уменьшить до 1 мкм. Цифровые съемочные системы (сенсоры) появились только на рубеже веков. К этому времени было достигнуто сопоставимое с фотоснимками геометрическое разрешение (5 – 6 мкм), появились средства хранения громадных объемов информации (порядка 1 Гб на каждый снимок), создана аппаратура стабилизации съемочной камеры в полете и высокоточного определения координат центров фотографирования. В настоящее время успешно эксплуатируются несколько цифровых камер, в частности: ADS40 (фирм LH-System, Швейцария), DMC2001 (фирма Z/I Imaging (США, Германия), HRSC (центр космических исследований Германии DLR) и другие, обеспечивающие возможность получения изображений как в видимой части спектра, так и в инфракрасном диапазоне. Имеются данные о Российских цифровых съемочных комплексах ЦТК-140 и ЦТК-70. Некоторые характеристики этих камер приведены в табл. 3.. Таблица 3 Наименование Характеристика камеры характеристики ADS40 DMC HRSC ЦТК-140 ЦТК-70 Фокусное расстояние, мм 62,5 120 47÷175 140 70 Размер пиксела, мкм 6,5 6 7 7 6÷7 Число спектральных каналов 6 12 5 1 4 Радиометрическое разрешение, бит 8 8 8 10/8 8 ÷12 Светочувствительный ПЗС-элемент: Л М Л Л Л линейка (Л), матрица (М) Объем съемок, выполняемых с помощью цифровых съемочных систем, пока не велик и на 2002 год составлял не более 6% от общего их объема [1], и по оценкам специалистов, достигнет 12% в 2004 году. С точки зрения фотограмметрической обработки цифровых изображений, получаемых с помощью цифровых съемочных систем на ПЗС-линейках, чрезвычайно важны два обстоятельства: 1. Изображения формируются в результате сканирования местности в направлении, перпендикулярном направлению полета (рис. 6, а). Поэтому результатом съемки являются не кадровые снимки, а полосы изображений, так что стереоскопические наблюдения и измерения возможны только по полосе перекрытия со смежным маршрутом. 2. Геометрия сканерных снимков не соответствует а б центральной проекции, поскольку каждая их строка Рис. 6. Сканирование местности с записью формируется из собственного центра. Фотограмметрической результатов: а – на одну, б – три ПЗС-линейки обработке таких изображений предшествует преобразование их в форму, соответствующую законам построения изображений при центральном проектировании. Невозможность создания стереопар, и отсутствие продольных перекрытий сканерных снимков существенно снижают точность их фотограмметрической обработки, поэтому современные съемочные системы предусматривают одновременное применение нескольких ПЗС-линеек, каждая из которых формирует изображение по определенному направлению. Так, цифровая система ASD40 имеет в фокальной плоскости три ПЗС-линейки (рис. 6, б), одна из которых обеспечивает съемку полосы по направлению «вперед», вторая – полосы в направлении «вниз», а третья – полосы «назад». Совместная обработка трех полос изображений позволяет получить продольные перекрытия и выполнить стереоскопические наблюдения. Цифровая съемочная система HRSC (High Resolution Stereo Camera) с помощью девяти линеек ПЗС в фокальной плоскости объектива выполняет съемку одновременно девяти перекрывающихся полос, пять из которых используется для стереообработки, а остальные четыре обеспечивают получение изображения в том или ином оптическом диапазоне. 4. ПРЕОБРАЗОВАНИЕ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ В ходе фотограмметрической обработки снимков возникает необходимость различного рода их преобразований, связанных как с улучшением читаемости, так и с изменением размеров изображения (например, при уменьшении или увеличении снимков в процессе их трансформирования). В первом случае говорят о фотометрической коррекции (оптических преобразованиях) цифрового изображения, а во втором – об изменении его геометрического разрешения, или о геометрических преобразованиях. Фотометрическая коррекция изображения, или оптические его преобразования, основаны на использовании связи между его компонентами, описываемой уравнением [8]: ρi = aρi,исх + b , (5) где ρi,исх , ρi – оптические плотности элемента изображения до и после фотометрической коррекции; a – функция, определяющая соотношение между оптическими плотностями исходного и преобразованного изображений; b – параметр яркости. Преобразования, описываемые уравнением (5), можно представить в виде графика (рис. 7), отражающего связь оптических плотностей элементов изображения до их коррекции (вертикальная ось) и после коррекции (горизонтальная ось). Фотометрическая коррекция выполняется путем изменения яркости изображения, его контрастности, либо изменением характера соотношений между оптическими плотностями Плотность до и после их преобразования. до коррекции Изменение яркости выполняется путем уменьшения или увеличения 1 параметра b каждого пиксела на одну и ту же величину, это приводит к 2 тому, что все элементы корректируемого изображения становятся более A светлыми или более темными. Изменение яркости группирует плотности к какому-либо одному (светлому или темному) краю спектра. На графике Плотность (рис. 7) это иллюстрируется смещением прямой 1 (или кривой 2) вдоль A″ после A′ горизонтальной оси. коррекции Изменение контрастности изображения выполняется с целью Рис. 7. График фотометрической изменения различий между плотностями смежных элементов и улучшения коррекции изображения таким образом читаемости границы между ними. Увеличение контрастности изображения выполняется следующим образом. Если оптическая плотность ρисх некоторого элемента превышает среднее значение, то она увеличивается пропорционально уровню квантования, а если она менее среднего, то уменьшается. При этом значения плотностей пикселов как бы смещаются к краям спектра: темные тона становятся еще темнее, светлые – светлее, некоторые их значения исчезают, но границы между элементами изображения становятся белее четкими. При уменьшении контрастности большие плотности уменьшаются, а малые – увеличиваются; при этом плотности группируются вблизи центра. Чрезмерное увеличение контрастности преобразует полутоновое изображение в бинарному, а чрезмерное уменьшение − ведет к его исчезновению. На графике (рис. 7) рассмотренные преобразования соответствуют вращению прямой 1 (кривой 2) вокруг центральной точки. Гамма-коррекция (тональная коррекция) изображения выполняется с целью увеличения или уменьшения его детальности, что достигается изменением передаточной функции a уравнения (5), определяющей характер преобразования. На графике (рис. 7) гамма-коррекция соответствует изменению кривизны и общего наклона линии 1 (или 2). При равномерной передаче оптической плотности (прямая 1 под углом 45° к координатным осям) их значения, соответствующие точкам A и A′, одинаковы. Изменим передаточную функцию a уравнения (5) так, чтобы ей соответствовало уравнение кривой 2. Теперь плотности исходного изображения (точка A) будет соответствовать плотность скорректированного изображения A″, причем, A ≠ A″. Заметим, что неправильное использование гамма-коррекции может привести к уменьшению числа полутонов и преобладанию областей одного тона. При обработке цветных изображений можно выполнить не только изменение яркости, контрастности или гамма-коррекцию, но и, меняя соотношение цветов, получить нужные оттенки. Геометрические преобразования растрового изображения изменяют его геометрическое разрешение и корректируют радиометрические характеристики. Необходимость таких преобразований возникает, например, при трансформировании цифрового снимка по элементам внешнего ориентирования, в процессе которого изменяется масштаб изображения и положение его элементов относительно координатных осей. Сходная по характеру задача возникает при внутреннем ориентировании цифрового изображения. В общем случае геометрические преобразования можно условно Рис. 8. Простые геометрические разделить на простые, требующие изменения только геометрического преобразования разрешения, и сложные, в результате которых выполняется изменение масштаба и поворот изображения. Простые преобразования выполняются при изменении масштаба изображения путем соответствующего изменения геометрического разрешения, когда каждому пикселу исходного изображения соответствует пиксел преобразованного с тем же или иным геометрическим разрешением. При этом формируется новая матрица, элементам которой присваивается радиометрическое разрешение соответствующего ему исходного изображения (рис. 8). Сложные преобразования выполняются при трансформировании изображения, когда коэффициент увеличения различных его частей неодинаков, или когда выполняется разворот на некоторый угол. Первая ситуация возникает при восстановлении, например, сетки квадратов по ее перспективе, а вторая – при внутреннем ориентировании снимка. В обоих случаях (рис. 9) каждому пикселу формируемого изображения соответствует несколько пикселов или их частей исходного изображения, или наоборот. Сущность выполняемых при этом геометрических и оптических c′ a′ b′ преобразований можно видеть на рис. 9, где элементы строк и столбцов 3′ a b c исходного изображения обозначены цифрами 1, 2, 3 и буквами a, b, c. 2′ Соответствующие элементы формируемого изображения обозначены – 3 1′ 2 цифрами 1′, 2′, 3′ и буквами a′, b′, c′. Совместим левые нижние углы 1 изображений и положим, что элементу 1′a′ соответствуют фрагменты четырех Рис. 9. Сложные элементов исходного растра: 1a (45 %), 1b (35 %), 2a (15 %) и 2b (5 %). В этом геометрические случае оптическая плотность ρ′ формируемого элемента 1′a′ зависит от преобразования оптических плотностей ρ1a, ρ1b, ρ2a, ρ2b элементов 1a, 1b, 2a и 2b, причем: ρ′ = 0,45ρ1a + 0,35ρ1b + 0,15ρ2a + 0,05ρ2b. Координаты элемента формируемого изображения находят по координатам соответствующего ему элемента исходного изображения, подставляя их в нужную формулу преобразования – трансформирования координат точек наклонного снимка, связи координат точек снимка и местности, внутреннего ориентирования снимка, или иную. 5. ИЗМЕРЕНИЕ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ Стереоскопические наблюдения двух изображений возможны при выполнении условий, касающихся съемки с двух различных точек пространства, разномасштабности изображений, величины угла конвергенции главных оптических осей, и т.п. Одним из основных условий получения стереоэффекта является требование наблюдения каждого снимка только одним глазом. Как и при наблюдении аналоговых снимков, основными способами получения стереоскопического эффекта по цифровым изображениям являются анаглифический, затворный, оптический и другие, получившие в компьютерном исполнении новые возможности. Их реализация учитывает ряд особенностей работы с цифровыми изображениями, в частности: простота геометрических и фотометрических преобразований, формирование изображения на экране монитора с покадровым (page- Рис. 10. Зона стереонаблюдений пары снимков flipping) или построчным (interlace) режимом выводом, наличие видеопамяти, и др. Анаглифический способ стереоскопических наблюдений не предполагает наличие какого-либо специального оборудования в виде плат или адаптеров, и требует наличия лишь анаглифических очков. Перекрывающиеся части левого и правого изображений, образующие зону стереоскопических наблюдений (рис. 10), окрашиваются в дополнительные цвета (например, сине-зеленое и красное) и выводятся на экран таким образом, что четные строки совмещенного изображения принадлежат левому снимку, а нечетные – правому. Полученное на экране монитора совмещенное изображение рассматривается через анаглифические очки, стекла которых окрашены в те же цвета, что и соответствующие им изображения снимков. В результате каждый глаз воспринимает только одно изображение, и наблюдатель видит пространственную модель местности. Затворный способ получения стереоскопического эффекта основан на специфике представления изображения на экране монитора и предполагает применение специальных затворных (жидкокристаллических) очков с LCD-затворами (Liquid Crystal Display) различных типов (ИБИК, NuVision, и др.), в которых стекла становятся прозрачными поочередно, в соответствии со сменой видеостраниц на экране монитора. Сущность способа заключается в следующем. Изображения левого и правого снимков формируются на страницах видеопамяти и поочередно выводятся на экран монитора. Наблюдения выполняются через очки, представляющие собой пару плоскопараллельных пластин с заключенным между ними слоем жидкого кристалла, который при воздействии на него электрического импульса может изменять интенсивность проходящего через него света так, что в каждый момент времени наблюдатель воспринимает изображение на экране монитора только одним глазом, левым или правым. Поскольку смена страниц видеопамяти на экране монитора синхронизирована с изменением прозрачности пластин затворных очков при помощи специального канала связи, то наблюдатель видит либо прямой стереоэффект, либо обратный. Для смены прямого стереоэффекта на обратный и наоборот достаточно изменить фазу, управляющую последовательностью вывода страниц видеопамяти. Оптический способ стереоскопических наблюдений предполагает вывод зоны стереонаблюдений левого и правого снимков (рис. 11) соответственно в левую и правую части экрана. Оба изображения окрашены в естественные цвета, поэтому для их рассматривания и получения стереоскопического эффекта нужно выполнить искусственное разделение соответственных лучей, что достигается применением специальной стереоприставки, устанавливаемой перед монитором. Это обеспечивает возможность наблюдения стереоскопической модели местности и ее измерения, минуя неизбежные потери света при использовании некоторых других способов и приспособлений. Имеются и другие способы получения по паре изображений стереоскопического эффекта, например, поляроидный, адаптированный к компьютерному построению модели, и др. Измерение построенной рассмотренными выше способами стереоскопической модели выполняют, как и в случае Рис. 11. Стереоприставка для использования аналоговых изображений, монокулярным и наблюдения стереомодели стереоскопическим способами. Монокулярный способ измерений используют для нанесения на снимки опорных точек, при внутреннем ориентировании снимков, и др. Применительно к обработке цифрового изображения монокулярные измерения сводятся к опознаванию нужной точки путем наведения на нее маркера, заменяющего измерительную марку стереокомпаратора. Считывание координат точки в системе растрового изображения oPxPyP (см. рис. 4) и преобразование их в ту или иную систему выполняется в автоматическом режиме. Стереоскопические измерения выполняют способом мнимой марки, в качестве которой используют курсор, настраиваемый по цвету, размеру и форме курсор. 6. АВТОМАТИЗАЦИЯ СТЕРЕОСКОПИЧЕСКИХ ИЗМЕРЕНИЙ Первые исследования в области автоматизации стереоскопических измерений были выполнены в МИИГАиК проф. А.С. Скиридовым в 1924–1932 гг. Полагая изображения достаточно малых участков снимков стереопары подобными, он предложил преобразовывать эти участки в электрические сигналы и, анализируя их, отождествлять (идентифицировать) соответственные точки. В то время это не получило развития из-за отсутствия технических средств, и в 1960 году А.С. Скиридов возобновил свои исследования, приступив вместе с Г.Д. Федоруком к созданию изогипсографа – прибора для автоматической рисовки горизонталей. Первый автоматизированный прибор, доказавший принципиальную возможность решения этой задачи, был разработан в 1950-х годах по предложению Гаррисона фирмой «Бауш и Ломб» совместно с научно-исследовательским топографическим отделом инженерных войск США. В последующем эти идеи были воплощены в целой серии фотограмметрических приборов – стереомате (США), аналитическом стереоприборе ОМИ-НИСТРИ (Канада), аналитическом фотокартографе (СССР), и др. Новый импульс получили идеи автоматизации с появлением ПЭВМ, дешевой электронной памяти, высокоточных сканеров и развитием теории машинного зрения. Применение этих и ряда других достижений науки и техники открыло путь к автоматизации широкого круга фотограмметрических задач, основанных на автоматической идентификации точек на перекрывающихся снимках. В настоящее время идентификация точек на паре снимков рассматривается как статистическая задача распознавания изображений при наличии помех и искажений и решается на основе динамической теории зрения с использованием оптико-электронных или программных блоков, называемых корреляторами. В ее основе лежит понятие образа – некоторой произвольной по форме и размеру области снимка вместе со всей имеющейся информацией. С математической точки зрения образ представляет собой многомерный вектор R как совокупность элементов изображения (пикселов), каждый из которых характеризуется положением и оптической плотностью ρij согласно уравнению (5). Опознавание точки левого снимка на правом сводится к определению эталонного образа R на левом снимке с центром в отождествляемой точке и поиску на правом снимке такого образа R′ , чтобы расстояние между ними было минимальным: |R – R′|=min. (6) Практически для автоматического опознавания точки необходимо: (1). Выбрать на левом снимке образ R (рис. 12) в виде области размером n× n пикселов и определить характеристики, необходимые для проверки условия (6). (2). Определить на правом снимке зону вероятного расположения искомой точки (зону поиска) размером m×m пикселов (m>> n). Координаты центров образа R на левом снимке (xл, yл) и зоны Образ R′ поиска на правом снимке (xп, yп) связаны Образ R известными зависимостями Зона xп ≈ xл − bсн, yп ≈ yл. поиска (3). Последовательным перемещением образа R′ размером n× n пикселов на правом снимке в границах зоны поиска размером m× m создать Левый снимок Правый снимок на правом снимке серию образов R′ и определить характеристики каждого из них с Рис. 12. К автоматической идентификации точек целью проверки условия (6). (4). Сопоставить характеристики каждого образа R′ с характеристикой-эталоном вектора R. Искомая точка на правом снимке будет расположена в центре образа R′, для которого выполняется условие (6). Проблема установления меры соответствия векторов R и R′ представляет основную трудность автоматического отождествления, и ее решению посвящен ряд публикаций ( [3], [9], [6], [10], и др). В известных разработках наибольшее распространение имеет алгоритм, предложенный профессором А.Н. Лобановым и основанный на расчете коэффициентов корреляции между оптическими плотностями элементов образа R и каждого из образов R′ на правом снимке с использованием формулы [6, 8]: r = ∑ (ρi − ρ0 )(ρ′i − ρ′0 ) , ∑ (ρi − ρ0 ) 2 (ρ′i − ρ′0 ) 2 (7) где ρ0 и ρ′0 – средние оптические плотности элементов зон (фрагментов), соответствующих образам левого R и правого (R′) снимков. Коэффициенты, подсчитанные для сочетаний образа R со всеми образами R′, образуют корреляционную матрицу: максимальное значение ее элемента соответствует наиболее тесной связи оптических плотностей сравниваемых участков левого и правого снимков, и, следовательно, выполнению условия (6). Так что искомая точка лежит в центре образа R′ с максимальным коэффициентом корреляции. Размер области, соответствующей образу R, обычно составляет 20×20 пикселов; а при малом числе контуров местности – 40 × 40 пикселов. Размер зоны поиска на правом снимке должен превышать удвоенные ожидаемые смещения точек, вызванные влиянием рельефа местности и подсчитываемых по формуле: δh = rh . H При высоте фотографирования над средней плоскостью снимка H = 2000, максимальном превышении точки над этой плоскостью h = ± 50 м и расстоянии от центра снимка до угла рабочей площади r = 100 мм (формат снимка 23×23 см) будем иметь δh = 2,5 мм, и тогда зона поиска будет иметь размер 5×5 мм. Возможными последствиями увеличение зоны поиска может оказаться некоторое увеличение времени обработки в обмен на гарантии попадания в нее соответственной точки. В специальной литературе имеются упоминания о методе иерархической релаксации (методе пирамид HRC), методе вертикальной линии (ULL), методе динамического программирования, и т.п. Некоторые из них основаны на анализе тех или иных признаков, характеризующих выделенные – их форму, взаимное расположение, ориентацию, и др. Однако все методы идентификации точек объединяют два обстоятельства: • отождествление выполняется на основе более или менее строгого анализа элементов изображений – их оптических плотностей и геометрического положения; корреляторов, обеспечивающих 100-процентную гарантию качества автоматической идентификации точек, не существует. Эти обстоятельства предопределяют целесообразность стереоскопического контроля положения измерительной марки после работы коррелятора. В большинстве случаев опытный наблюдатель ее обязательно чуть-чуть подправит по высоте. Искажения точек, вызванные влиянием угла наклона снимка и рельефа местности, вызывают смещения отдельных элементов растра, и это не может не сказываться на качестве идентификации. Так, если на левом снимке образ R всегда представлен квадратом, то на правом снимке из-за влияния угла наклона и рельефа местности соответствующие элементы образа R′ получают смещения, и в общем случае образуют многоугольник (рис. 13). Поскольку анализируемый образ R′ геометрически не всегда подобен образу R, то вероятность полного совпадения искомой точки уменьшается. Еще более сложная Рис. 13. Геометрическое положение ситуация возникает в случае, если изображения левого и правого элементов образа R′ на правом снимков развернуты один относительно другого. снимке искажается рельефом Однако из-за малости элементов изображения эти искажения не столь значительны, а их влияние можно компенсировать геометрической коррекцией положения пика корреляции и соответствующей ему точки правого снимка. Одно из таких решений основано на том, что смещения элементов образа являются следствием неровностей рельефа в пределах соответствующего участка местности и интерпретируются как параллактические смещения [4]. В ряде случаев поиск идентичных точек снимков выполняется путем сравнения соответствующих участков изображений с эталоном. С этой целью на исходном снимке ограничиваются отождествляемый фрагмент-эталон и зона его поиска (рис. 14). Сравнение соответственных участков других изображений позволяет идентифицировать искомые точки. Рассмотренный способ отождествления по эталону широко применяется для поиска координатных меток снимков и автоматического их внутреннего ориентирования. Заметим, что практическая реализация рассмотренного механизма отождествления предполагает использование шумоподавляющих фильтров той или иной размерности, коррекцию положения пика корреляции, и т.п. Оснащение цифровых фотограмметрических систем корреляторами, осуществляющими автоматическую идентификацию идентичных точек снимков, существенно снизило требование к профессиональной подготовке Рис. 14. Эталон (слева) и зона его поиска на фотограмметристов и обеспечило широчайшее их применение в снимке (справа) производственных условиях. • Литература 1. Зайцев В. Обзор продукции LH System. // ArcReview, 2002, № 3, с. 3 2. Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов. УП «БелНИЦзем», М-н, 2003. 3. Ипатова Л.П., Хрущ Р.М. Автоматическая идентификация одноименных областей и точек стереопары фотоснимков. – «Геодезия и картография», 2001, № 6, с.22--24. 4. Книжников Ю.Ф., Гельман Р.Н. О некоторых источниках погрешностей при автоматическом измерении цифровых стереопар. – «Геодезия и картография», 2000, № 5, с. 25 – 31. 5. Лаврова Н.П., Алмазов И.В., Прилепский А.Н. Аэрофотосъемка. Автоматизация аэрофотосъемочных процессов. М., «Недра», 1985. 6. Лобанов Н.А. Аэрофототопография. М., «Недра», 1978. 7. Лобанов А.Н., Буров М.И., Краснопевцев Б.В. Фотограмметрия. М., «Недра», 1987. 8. Лобанов А.Н., Журкин И.Г. Автоматизация фотограмметрических процессов. М., «Недра», 1980. 9. Методы компьютерной обработки изображений. Под ред. В.А. Сойдера. М., Физматгиз, 2001. 10. Прэтт У. К. Цифровая обработка изображений. Кн. 2. Пер. с англ. М., «Мир», 1982. 11. Пособие по фотограмметрии. Сокращенный перевод под ред. В.И. Кораблева. М., «Недра», 1970, 1971. 12. СБИС для распознавания образов и обработки изображений, М. «Мир», 1988. 13. Тюфлин Ю.С. Космическая фотограмметрия при изучении планет и спутников. М., «Недра», 1986. 14. Урмаев Н.А. Элементы фотограмметрии. М., Геодезиздат, 1941. 15. Фотограмметрия. // Келль Н.Г., Корнилов Ю.Н., Пономарев Е.В. и др. М., «Недра», 1989. 16. Хрущ Р.М. Этапы становления и развития фотограмметрии в России. « Геодезия и картография», 2003, № 7, с. 50 -- 61.