014651 B1 014651 014651 B1 B1
реклама

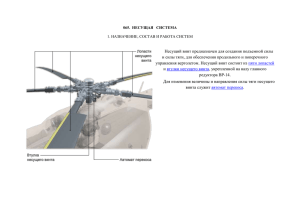
Евразийское патентное ведомство (19) (11) 014651 (13) B1 (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ (45) Дата публикации и выдачи патента: 2010.12.30 (21) Номер заявки: 200801544 (22) Дата подачи: 2006.01.13 (54) ЖЕСТКАЯ В ПЛОСКОСТИ, УСТАНОВЛЕННАЯ В КАРДАННОМ ПОДВЕСЕ ВТУЛКА НЕСУЩЕГО ВИНТА С ИЗМЕНЯЕМЫМ НАКЛОНОМ (72) (56) US-В2-7153094 RU-C1-2156208 RU-C2-2162048 RU-C2-2235662 Изобретатель: Раубер Ричард И., Брасуэлл Джеймс Л., мл., Кэмпбелл Томас К., Попелка Дэвид А., Сазерленд Майкл Дж., Стэмпс Фрэнк Б., Стэнни Кейт, Тисдэйл Патрик Р., Васиковски Марк (US) Представитель: Поликарпов А.В., Борисова Е.Н. (RU) 014651 B1 (57) Втулка (29) несущего винта для винтокрылого летательного аппарата содержит раму (31), имеющую несколько плеч (33), соединенных друг с другом планками (35). Внутренние стенки рамы определяют центральную полость (30). Рычаг (53) установки угла лопасти подвижно соединен с рамой и частично расположен в центральной полости. К раме неподвижно прикреплена соединительная оболочка. B1 (74) 014651 (43) 2009.02.27 (86) PCT/US2006/001082 (87) WO 2007/081337 2007.07.19 (71)(73) Заявитель и патентовладелец: БЕЛЛ ХЕЛИКОПТЕР ТЕКСТРОН ИНК. (US) (51) Int. Cl. B64C 27/32 (2006.01) 014651 Область техники Настоящее изобретение относится к втулкам несущего винта винтокрылых летательных аппаратов. В частности, изобретение относится к жесткой в плоскости, установленной в карданном подвесе втулке несущего винта с изменяемым наклоном. Описание уровня техники Втулки несущего винта используются давно. Известно много удачных конструкций втулок для различных типов винтокрылых летательных аппаратов. Втулки обычно предназначены для соединения лопастей несущего винта с вращающимся валом или мачтой. Как известно специалистам в области винтокрылых летательных аппаратов, втулки несущего винта подразделяют на две основные категории: ″жесткие в плоскости″ и ″мягкие в плоскости″. Жесткие втулки используют в винтокрылых летательных аппаратах, у которых собственная частота колебаний в плоскости/опережения-запаздывания лопастей винта больше как частоты вращения лопастей, так и собственной частоты их колебаний вне плоскости/маховых колебаний. Мягкие втулки используют, когда собственная частота колебаний в плоскости/опережения-запаздывания лопастей винта меньше и частоты вращения винта, и собственной частоты колебаний лопастей вне плоскости/маховых колебаний. Хорошо известно, что лопасти и связанная с ними втулка винтокрылого летательного аппарата становятся динамически более нестабильными, когда собственные частоты колебаний лопастей вне плоскости/маховых колебаний и в плоскости/опережения-запаздывания сближаются. Поэтому винтокрылые летательные аппараты часто конструируют так, чтобы собственные частоты колебаний лопастей несущего винта вне плоскости/маховых колебаний и колебаний в плоскости/опережения-запаздывания отличались по меньшей мере на 25% частоты вращения винта. При конструировании летательного аппарата при выборе между жесткой и мягкой системами часто учитывают несколько важных общих правил. Суммарный вес втулки и лопастей несущего винта винтокрылого летательного аппарата с жесткой системой обычно больше, чем с мягкой системой. Однако аппарат с жесткой системой в настоящее время считается лучшим решением для движения на более высоких скоростях и/или для создания большей тяги, обеспечивая при этом лучшую динамическую устойчивость к колебаниям. Одной из многих переменных, от которых зависит динамическая устойчивость к колебаниям втулки и лопастей несущего винта с жесткой системой, является угол δ3. На фиг. 1 схематично показана известная втулка и угол δ3 для системы несущего винта. Поскольку один конец рычага установки угла лопасти удерживается шатуном установки угла лопасти и другой конец этого рычага прикреплен к лопасти, при маховых движениях лопасти будет изменяться угол ее установки. Следовательно, угол δ3 представляет собой корреляцию между маховым движением несущего винта и углом установки лопастей. Когда лопасть совершает маховое движение вверх, система несущего винта при положительном угле δ3 будет испытывать момент на пикирование, а при отрицательном угле δ3 - момент на кабрирование. Угол δ3 регулируют для обеспечения динамической устойчивости и для уменьшения амплитуды махового движения несущего винта при воздушных возмущениях и/или выполняемых пилотом маневрах. Например, у летательного аппарата с трехлопастным несущим винтом с изменяемым наклоном угол δ3 обычно составляет около -15°, что создает достаточную устойчивость и достаточное затухание махового движения. Для винтокрылых летательных аппаратов существует потребность повысить тягу, скорость и грузоподъемность. Например, существует потребность в более мощном винтокрылом летательном аппарате. Одним путем повышения тяги является увеличение количества лопастей. Существующие винтокрылые летательные аппараты обычно имеют трехлопастные несущие винты, в которых рычаг и шатун установки угла лопасти (см. фиг. 1) обычно расположены в одной плоскости со втулкой несущего винта, снаружи от нее. Однако получение небольших углов δ3 (например, около -15°) для многолопастных винтов с четырьмя и более лопастями при размещении рычага и шатуна в плоскости втулки и снаружи от нее является сложной конструктивной задачей. Конфигурация втулки, как описано выше для многолопастных винтов, не позволяет разместить рычаги в нужных местах из-за конструктивных трудностей. Кроме того, специалисты по конструированию винтокрылых летательных аппаратов стремятся размещать элементы несущего винта как можно ближе к оси вращения, чтобы минимизировать нежелательные результирующие силы, приводящие к преждевременной поломке элементов. Хотя описанные усовершенствования намного улучшают конструкцию втулки несущего винта, они все же имеют значительные недостатки. Сущность изобретения Существует потребность в усовершенствованной втулке несущего винта. Поэтому целью настоящего изобретения является создание усовершенствованной втулки несущего винта, к которой могут быть присоединены по меньшей мере четыре лопасти при сохранении оптимальных углов δ3. Эта цель достигается посредством втулки, в которой шатуны установки угла лопасти и рычаги установки угла лопасти расположены во внутренней полости втулки. Например, втулка несущего винта может быть выполнена: (1) с соединительной оболочкой, расположенной над рамой; (2) с соединитель-1- 014651 ной оболочкой, расположенной под рамой; и (3) с двумя соединительными оболочками, одна из которых расположена над рамой, а другая под рамой. Изобретение обеспечивает следующие значительные преимущества: (1) позволяет использовать в системе несущего винта винтокрылого летательного аппарата более трех лопастей; (2) снижается вероятность повреждения рычагов установки угла осколками или при обстреле; (3) снижается вероятность повреждения приводного звена осколками или при обстреле; (4) предусматривается дублирование пружины втулки; и (5) улучшается передача силы между пружинами втулки и рамой. Другие цели, особенности и преимущества будут понятны из дальнейшего описания. Краткое описание чертежей Отличительные признаки изобретения изложены в прилагаемой формуле. Однако само изобретение, а также лучший вариант его использования, его цели и преимущества будут лучше понятны из подробного описания и прилагаемых чертежей, где на фиг. 1, относящейся к уровню техники, схематично показано влияние угла δ3 в системе несущего винта; на фиг. 2 - вертикальная проекция летательного аппарата с несущим винтом с изменяемым наклоном, втулка которого выполнена согласно предпочтительному варианту осуществления изобретения; на фиг. 3А - в аксонометрии втулка несущего винта для летательного аппарата, изображенного на фиг. 2; на фиг. 3В - в аксонометрии рама втулки несущего винта, изображенной на фиг. 3А; на фиг. 4 - в аксонометрии втулка несущего винта, изображенная на фиг. 3А, со снятой соединительной оболочкой; на фиг. 5 - вид сверху втулки несущего винта, изображенной на фиг. 3А, со снятой соединительной оболочкой; на фиг. 6 - вид сверху втулки несущего винта, изображенной на фиг. 3А; на фиг. 7 - разрез втулки, изображенной на фиг. 3А, по линии 7-7; на фиг. 8 - в аксонометрии втулка несущего винта согласно альтернативному варианту осуществления изобретения, у которой соединительная оболочка расположена под рамой; на фиг. 9 - разрез втулки, изображенной на фиг. 8, по линии 9-9; на фиг. 10 - в аксонометрии втулка несущего винта, имеющая две соединительные оболочки, согласно альтернативному варианту осуществления изобретения; и на фиг. 11 - разрез втулки, изображенной на фиг. 10, по линии 11-11. Описание предпочтительного варианта осуществления изобретения Усовершенствованная втулка несущего винта, согласно изобретению, позволяет присоединять четыре и более лопастей несущего винта при сохранении оптимальных углов δ3. Имеется три основных варианта осуществления изобретения: (1) с соединительной оболочкой, расположенной над рамой, (2) с соединительной оболочкой, расположенной под рамой, и (3) с двумя соединительными оболочками, одна из которых расположена над рамой, а другая под рамой. Однако объем изобретения не ограничен описанными и изображенными на чертежах вариантами осуществления. Предлагаемая втулка несущего винта может быть использована для четырехлопастных несущих винтов с изменяемым наклоном в винтокрылых летательных аппаратах. Хотя изобретение описано применительно к винтокрылым летательным аппаратам с несущим винтом с изменяемым наклоном, его можно также использовать в других винтокрылых транспортных средствах/летательных аппаратах. Предлагаемую втулку можно также использовать для несущего винта, количество лопастей которого больше или меньше четырех. На фиг. 2 показан винтокрылый летательный аппарат с несущим винтом с изменяемым наклоном, содержащий втулку согласно изобретению. Летательный аппарат 11 на фиг. 2 показан в режиме самолета в полете. Крылья 15, 17 используются для подъема фюзеляжа 13 самолета в результате работы несущих винтов 19, 21, каждый из которых имеет четыре лопасти 23. Втулки 29 несущих винтов расположены внутри гондол 25, 27 и на фиг. 2 не видны. Каждый винт 19, 21 вращается от двигателя (не показан), расположенного внутри соответствующей гондолы 25, 27. На фиг. 3А показан в аксонометрии предпочтительный вариант выполнения втулки 29, которая содержит раму 31, имеющую плечи 33 и планки 35. Плечи 33 соединены с планками 35, образуя с ними одно целое. В одном варианте осуществления изобретения рама 31 выполнена из композитных материалов. Более конкретно, рама 31 выполнена из множества отдельных связанных между собой слоев упорядоченного волокнистого материала. Однако рама 31 может быть выполнена из любого другого подходящего материала любым другим подходящим способом. Кроме того, хотя показана рама с четырьмя плечами 33, она может иметь больше или меньше четырех плеч 33 для присоединения соответствующего количества лопастей 23. Путем поворота втулки вокруг осей 37А, 37В изменяется угол установки лопастей 23 (фиг. 2). Мачта (не показана) вращается от трансмиссии (не показана) вокруг оси 39. На концах плеч 33 рамы закреплены внешние подшипники 41 флюгирования, которые позволяют лопастям 23 поворачиваться вокруг осей 37А, 37В, по меньшей мере, на некоторый угол. К подшипни-2- 014651 кам 41 флюгирования прикреплены центробежные подшипники 43, которые являются основными соединительными элементами между лопастями 23 и втулкой 29. Подшипники 43 выдерживают очень большую центробежную силу, которая часто возникает при вращении лопастей 23 вокруг оси 39. На фиг. 3В упрощенно показана рама 31 втулки 29. Внутренние стенки 32 рамы 31 ограничивают центральную полость 30. Как показано на фиг. 7, пружина 45 втулки имеет внутренний сердечник 47, содержащий первую группу резиновых элементов и металлических шайб (не показаны подробно), уложенных в чередующемся порядке друг на друга между верхней наружной соединительной оболочкой 49 и внутренней оболочкой 51, и вторую группу резиновых элементов и металлических шайб (не показаны подробно), уложенных в чередующемся порядке друг на друга между нижней наружной соединительной оболочкой 50 и внутренней оболочкой 51. Оболочки 49-51 выполнены из металла. Пружина 45 допускает карданный подвес рамы 31 относительно мачты и оси 39 ее вращения. Пружина 45 также воспринимает маховое движение лопастей 23 и передает тягу. Как лучше видно на фиг. 4, где втулка 29 показана без соединительной оболочки 49, втулка содержит четыре рычага 53 установки угла лопасти, включающие плечи 55 установки угла лопасти и внутренние поперечины 57 установки угла лопасти. Рычаги 53 с возможностью поворота присоединены к разветвлениям 59 через внутренние подшипники 61 флюгирования, которые, по существу, отцентрированы по соответствующим осям 37А, 37В. Подшипники 61 функционально связаны с одинаковыми по размеру отверстиями в рычагах 53, расположенных, по существу, на пересечении рычагов 55 и поперечин 57. К поперечинам 57 прикреплены рукоятки (не показаны) таким образом, что при повороте рычагов 53 вокруг соответствующих осей 37А, 37В рукоятки заставляют прикрепленные к ним лопасти 23 несущего винта (показаны на фиг. 2) соответственно поворачиваться вокруг этих осей 37А, 37В. Концы 63 рычагов 53 показаны в нейтральном/номинальном положении, когда концы 63, по существу, отцентрированы по плоскости, определяемой осями 37А, 37В. Концы 63 рычагов 53 соединены с верхними концами шатунов 65 установки угла лопасти. Шатуны 65 представляют собой стержневые элементы, расположенные, по существу, параллельно оси 39 вращения мачты. Движение шатунов 65 в любом направлении по траектории, параллельной оси 39, приводит к подъему или к опусканию концов 63, в результате чего рычаги 55 и поперечины 57 поворачиваются вокруг осей 37А, 37В, изменяя угол установки лопастей 23 несущего винта. Рычаги 53 расположены, по существу, внутри центральной полости 30. Центральная полая колонна образована продолжением вертикальных границ центральной полости 30 вверх и вниз и представляет собой ее вертикальный отпечаток. Например, центральная полая колонна занимает, по меньшей мере, пространство между верхним отпечатком 34А и нижним отпечатком 34В, как показано на фиг. 3В. В этом варианте осуществления плечи 55 расположены снаружи центральной полой колонны, однако, они могут находиться внутри колонны. Как видно на фиг. 5, где втулка 29 показана сверху без соединительной оболочки 49 и нижней наружной оболочки 50, втулка также содержит универсальный шарнир равных угловых скоростей (полностью не виден), который содержит приводные звенья 67, ориентированные, по существу, параллельно плоскости, определяемой осями 37А, 37В. Один конец каждого приводного звена 67 может быть соединен с цапфой (не показана), соединенной шлицами с мачтой/приводным валом (не показаны). Цапфа передает вращающую силу от мачты к приводным звеньям 67. Другие концы приводных звеньев 67 могут быть соединены с приводными стойками 68 соединительной оболочки 49 (фиг. 10 и 11) и предназначены для передачи вращающей силы от звеньев 67 соединительной оболочке 49. Соединительная оболочка 49 соединена с рамой вдоль планок 35 рамы, так что вращающая сила передается от оболочки 49 к раме 31. На фиг. 6 втулка 29 показана сверху, а на фиг. 7 показан разрез втулки 29 согласно фиг. 3А по линии 7-7, соответствующей осям 37А, 37В. В показанном на фиг. 8-9 варианте осуществления изобретения втулка несущего винта имеет пружину 71, подобную пружине 45, а соединительная оболочка 72 пружины 45 расположена под рамой 73. Как показано на фиг. 8, втулка 69, по существу, аналогична втулке 29 и содержит, по существу, те же элементы, но имеет три основных отличия: (1) соединительная оболочка 72 расположена на нижней, а не на верхней стороне рамы 73; (2) рычаги 75 установки угла лопасти представляют собой изогнутые стержни, части которых расположены немного выше плоскости, определяемой осями 77А, 77В изменения угла установки лопастей, но остаются внутри центральной полости, ограниченной внутренними стенками 32 рамы 73; и (3) приводные звенья 81 расположены немного ниже плоскости, определяемой осями 77А, 77В, но, по существу, остаются внутри центральной полой колонны. В альтернативном варианте втулка 69 несущего винта может содержать рычаги 53, лежащие, по существу, в плоскости, определяемой осями 77А, 77В. Как и в варианте, показанном на фиг. 3-7, пружина 71 втулки позволяет осуществить карданный подвес рамы 73 относительно мачты и оси 39 (фиг. 3а) вращения мачты. Пружина 71 втулки также может воспринимать маховое движение лопастей 23 (фиг. 2) и передавать тягу. Показанная фиг. 10-11 втулка несущего винта, согласно изобретению, имеет пружину 85, содержащую две соединительные оболочки 86. Эта втулка 83, по существу, аналогична втулке 29 и содержит, по существу, такие же элементы, за исключением того, что она имеет две соединительные оболочки 86, одна из которых установлена на нижней стороне рамы 87, а другая на верхней стороне рамы 87. Важным -3- 014651 преимуществом втулки 83 является дублирование соединительной оболочки 86. Например, если одна из оболочек 86 будет пробита баллистическим снарядом или повредится по другой причине, оставшаяся соединительная оболочка 86 будет продолжать функционировать нормально. Другим важным преимуществом варианта с двумя соединительными оболочками 86 является лучшее распределение сил, передаваемых от пружин 85 втулки на раму 87. Подобно варианту осуществления, показанному на фиг. 3-7, пружины 85 позволяют выполнить карданную установку рамы 87 относительно мачты и оси 39 (фиг. 3А) вращения мачты. Пружины 85 также воспринимают маховое движение лопастей 23 (фиг. 2) и передают тягу. Важное преимущество настоящего изобретения состоит в том, что несмотря на присоединение к втулке четырех и более лопастей, большинство элементов компактно размещается, по существу, в полости между планками рамы. Благодаря этому втулки согласно изобретению менее уязвимы для противника и для случайных осколков. Кроме того, изобретение предусматривает несколько вариантов движения рычага установки угла лопасти. Например, когда соединительная оболочка расположена над рамой, имеется больше пространства для движения рычага вниз. Аналогично, если соединительная оболочка расположена под рамой, то будет больше пространства для движения рычага вверх. Если же соединительные оболочки расположены над рамой и под рамой, рычаг может двигаться на равные расстояния вверх и вниз. Далее в каждом описанном варианте осуществления изобретения повреждение центробежного подшипника не сопровождается потерей лопасти. Скорее всего, рычаг, связанный с поврежденным центробежным подшипником, будет притянут к соответствующему разветвлению рамы так, что, по меньшей мере, некоторое время летательный аппарат может работать безопасно. Очевидно, что описанное и показанное на чертежах изобретение имеет значительные преимущества. Изобретение не ограничено описанными вариантами и допускает другие варианты осуществления, не изменяющие его сущности. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Втулка несущего винта для винтокрылого летательного аппарата, содержащая раму, имеющую несколько плеч, соседние из которых соединены друг с другом планкой, причем плечи и планки рамы определяют центральную полость для прохождения центрального вала; по меньшей мере один рычаг установки угла лопасти, имеющий внутреннюю поперечину и плечо и шарнирно соединенный с рамой, причем рычаг с поперечиной расположен, по существу, внутри центральной полости, и универсальный шарнир равных угловых скоростей для передачи силы от центрального вала к раме, расположенный, по существу, внутри полой центральной колонны. 2. Втулка несущего винта по п.1, в которой рама выполнена из отдельных слоев упорядоченного волокнистого материала. 3. Втулка несущего винта по п.1, дополнительно содержащая пружину, имеющую первую наружную соединительную оболочку, упруго прикрепленную к раме. 4. Втулка несущего винта по п.3, дополнительно содержащая вторую пружину, имеющую вторую наружную соединительную оболочку, упруго прикрепленную к раме. 5. Втулка несущего винта по п.1, в которой универсальный шарнир равных угловых скоростей содержит приводное звено, расположенное, по существу, внутри центральной полости. 6. Втулка несущего винта по п.1, в которой рычаги установки угла лопасти выполнены с возможностью получения угла δ3 около -15°. 7. Втулка несущего винта по п.1, в которой рама выполнена с возможностью установки по меньшей мере четырех лопастей несущего винта. 8. Втулка несущего винта для винтокрылого летательного аппарата, содержащая раму, имеющую по меньшей мере четыре плеча, соседние из которых соединены друг с другом планкой, причем плечи и планки определяют центральную полость для прохождения центрального вала; рычаг установки угла лопасти, имеющий внутреннюю поперечину и плечо и шарнирно соединенный с рамой, причем указанный рычаг с поперечиной расположены внутри полой центральной колонны; и гомокинетический шарнир для передачи силы от центрального вала к раме, расположенный, по существу, внутри полой центральной колонны; причем рычаги установки угла лопасти выполнены с возможностью получения угла δ3 около -15°. 9. Втулка несущего винта по п.8, в которой рама выполнена из композитного материала, образованного отдельными слоями упорядоченного волокнистого материала. 10. Втулка несущего винта по п.8, дополнительно содержащая первую пружину, упруго соединенную с рамой. 11. Втулка несущего винта по п.10, дополнительно содержащая вторую пружину, упруго соединенную с рамой. 12. Винтокрылый летательный аппарат, содержащий -4- 014651 фюзеляж; по меньшей мере один двигатель, расположенный на фюзеляже, для создания крутящего момента; по меньшей мере один винтокрылый элемент; центральный вал для передачи крутящего момента винтокрылому элементу и втулку несущего винта, установленную между центральным валом и винтокрылым элементом и содержащую раму, имеющую несколько плеч, соседние из которых соединены друг с другом планкой, причем плечи и планки рамы определяют центральную полость для прохождения центрального вала; рычаг установки угла лопасти, имеющий внутреннюю поперечину и плечо и шарнирно соединенный с рамой, причем рычаг с поперечиной расположен, по существу, внутри центральной полости, первую пружину, содержащую первую наружную соединительную оболочку, неподвижно прикрепленную к раме, и гомокинетический шарнир, соединяющий центральный вал и раму и расположенный, по существу, внутри полой центральной колонны. 13. Винтокрылый летательный аппарат по п.12, в котором рама выполнена из отдельных слоев упорядоченного волокнистого материала. 14. Винтокрылый летательный аппарат по п.12, в котором втулка дополнительно содержит вторую пружину, имеющую вторую наружную соединительную оболочку, неподвижно прикрепленную к раме. 15. Винтокрылый летательный аппарат по п.12, в котором рычаг установки угла лопасти позволяет получить угол δ3 около -15°. 16. Винтокрылый летательный аппарат по п.12, в котором рама функционально связана по меньшей мере с четырьмя лопастями несущего винта. 17. Винтокрылый летательный аппарат по п.12, представляющий собой летательный аппарат с изменяемым наклоном несущего винта. 18. Способ регулировки угла установки лопастей несущего винта, включающий обеспечение наличия рамы, имеющей несколько плеч, соседние из которых соединены друг с другом планками, и поворот рычага установки угла лопасти, расположенного в полой центральной колонне, путем перемещения шатуна установки угла лопасти внутри полой центральной колонны, причем поворотом рычага установки угла лопасти регулируют угол установки лопасти несущего винта. 19. Способ по п.18, дополнительно содержащий обеспечение наличия универсального шарнира равных угловых скоростей, содержащего приводные звенья, расположенные в полой центральной колонне. Фиг. 1 Уровень техники -5- 014651 Фиг. 2 Фиг. 3А Фиг. 3В -6- 014651 Фиг. 4 Фиг. 5 -7- 014651 Фиг. 6 Фиг. 7 Фиг. 8 -8- 014651 Фиг. 9 Фиг. 10 Фиг. 11 Евразийская патентная организация, ЕАПВ Россия, 109012, Москва, Малый Черкасский пер., 2 -9-