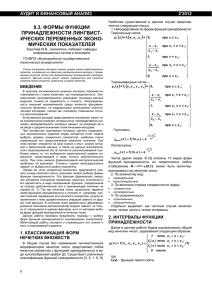
АЛГОРИТМЫ ДВИЖЕНИЯ РОБОТА LEGO MINDSTORMS NXT ПО
реклама

…
,
.,
.,
.
.
-
).
,
,
,
,
.
1.
.
,
2.
,
3.
(0,1),
,
0
1.0
.
-
,
.
.5
,
4.
5.
6.
7.
10
.
25
.
8.
-
1.
.
2.
,
-
3.
-
5.
,
,
.
4.
6.
7.
(
).
-
-
8.
.,
.
, 1977. 288 .
.:
/
1981. 296 .
. .
. .,
.
.
.
.:
.
. .,
.
.
,
.:
, 2002. 157 .
. .
.
:
. . .
, 2003. 267 .
Kecman V. Learning and Soft Computing: support vector machines, neural
netw orks and fuzzy logic models. The MIT Press, 2001. P. 567.
Passino K. M., Yurkovich S. Fuzzy Control. Addison-Wesley . 1997. P. 522.
.,
.,
.
,
. .: «
»,
2004. 452 .
/
. .
, .
. .
. .:
, 1993. 368 .
Bibliography
Kazakev ich V.V., Rodov A.B. Autimatic optimization systems. M.: Energy
1977. 288 p.
Industrial electric furnaces. Arc furnances and special heatings
installations / ed. Sv enchansky . M.: Energoizdat 1981. 296 p.
Lapshin I. V. Arc furnance technological process automation. M.: MISIS,
2002. 157 p.
Parsunkin B.N., Bushmanova M.V., Andreev S.M. Metallurgiacal process
automatic optimization system consideration. Magnitogorsk: MGTU of G.I.
Nosov 2003. 267 p.
Kecman V. Learning and Soft Computing: support vector machines, neural
netw orks and fuzzy logic models. The MIT Press, 2001. 567 p.
Passino K. M., Yurkovich S. Fuzzy Control. Addison-Wesley. 1997. 522 p.
Rutkov skaya D., Pilinsky M., Rutkovsky L. Neural nets, genetic algorithms
and fuzzy sustems. M.: «Gory achay a liniy a – Telecom». 2004. 452 p.
Applied fuzzy systems / ed. T. Terano, K.Asai, K.Sugeno. M: Mir, 1993. 368 p.
621.865.8
.
LEGO MINDSTORMS NXT
.
.
Lego Mindstorms NXT
-
.
.
-
,
,
,
,
Lego Mindstorms RCX,
-
,
NXT.
Lego Mindstorms NXT
,
,
».
.
(
-
.
. . .
. 2011.
3.
).
:
1.
(
).
,
.
-
-
(«
»/«
»)
———————————————————————————————————
,
91
.
,
D1 –
.
,
,
-
, D2 –
.
.
,
-
.
(
,
,
,
.
,
),
«
,
»,
-
.
,
2.
-
.
.
» («Generate Light»)
,
,
.
.
,
,
.
.
-
-
,
(
.
)
-
Porog.
:
1.
,
.
2.
-
,
,
16% (D1–D2).
,
(1)
.
-
,
.
.
»
.
, ,
,
,
,
.
.
,
.
-
,
,
.
,
,
.
( )
«
:
= D2+((D1 – D2)/2),
.
,
,
,
,
,
-
Porog
. 8%.
»
,
.
(1)
.
:
1.
2.
.
.
,
,
.
,
.
4
.
(
.
).
,
.
92 ———————————————————————————————————
. . .
. 2011.
.
,
3.
Lego Mindstorms NXT
…
.
e=S1-grey
,
,
–
.
uk=k2*(e*e*e),
k2 0.01
:
:
1.
.
2.
-
upk = k1*e + k2*e*e*e
.
3.
-
+
,
k2
,
,
,
90°,
,
,
.
(100).
,
k1
-
:
,
,
.
-
,
.
:
-
,
.
.
.
.
.
grey
.
s1,
.
:
left=s1;
right=s2;
while(true)
{ up=k1*((s1-left)-(s2-right));
Motor[MotorB]=50+up;
Motor[MotorC]=50-up;
wait1msec(1);}
:
.
s1
,
grey,
.
.
–
-
«
»
.
(s1 – grey).
–
,
.
UP = k * (s1 – grey).
-
.
:
k–
grey
-
.
s1,
while(true)
{up=k*(s1-grey);
motor[MotorB]=50+up;
motor[MotorC]=50–up;
wait1msec(1);}
e,
eold
.
1.
2.
-
-
.
:
left=s1; right=s2; eold=0;
while(true)
{ e=(s1-left)-(s2-right);
u=k1*e+k2*(e-eold); eold=e;
Motor[MotorB]=50+u; Motor[MotorC]=50-u;
wait1msec(1);}
ud=k*(S1-Sold)/ t,
S1 –
; Sold –
.
upd = up+ud
,
,
upd = k1*(S1-grey) + k2*(S1-Sold)
,
k2
k1.
-
,
,
:
. . .
. 2011.
3.
———————————————————————————————————
93
.
2.
:
:
-
«
»
4.
center=S3
5.
6.
k1=1+(S3-center)/3
U=k1*e
:
left=s1; right=s2; center=s3;
while(true)
{ e=(s1-left)-(s2-right);
k1=1+(s3-center)/10;
u=k1*e;
Motor[MotorB]=50+u; Motor[MotorC]=50-u;
wait1msec(1);}
:
100%
-
,
-
7.
8.
1.
2.
.
.
,
,
,
,
,
.
51086-97.
.
3.
4.
5.
.
1.
3.
-
6.
7.
8.
2006.
.
.
.:
.
.
. . 1:
= The Art of Computer Programming. Vol. 1. Fundamental
Algorithms. 3. .:
, 2006. . 720.
.
.
:
.
. 3. .:
, 2004. 880 .
–
,
.
,
,
. URL:http://w w w .my robot.ru/articles/lego_line.php
: 03.04.2011).
.
:
/ .
.
.
;
.
.
. .:
, 2005.
,
.
. URL:http://automation-sy stem.ru/
reguly ator/ty pe-of-control.html (
: 03.04.2011).
:
= INTRODUCTION TO ALGORITHMS /
.
,
.
,
.
,
. 2. .:
, 2006. . 1296.
Bibliography
GOST R 51086-97. Sensors and transducers of phy sical quantities
electric. Terms and definitions. section 3 «Terms and definitions».
Sensors in modern measurements.
A. F. Moscow . Radio and
communication. 2006
Donald Knuth the Art of computer programming. Vol. 1. The basic
algorithms = The Art of Computer Programming. Vol. 1. Fundamental
Algorithms. 3-e izd. M.: Williams, 2006. WITH. 720.
Ian Graham. Object-oriented methods. Principles and practice / per. s
angl. 3rd edition. M.: Williams, 2004. 880.
A Simple Lego robot, the nex t in line. Robots, robotics, microcontrollers.
URL:http://www.myrobot.ru/articles/lego_line.php (date of access: 03.04.2011).
Modern sensors. Handbook. J. Friden Translation from English YU.A. Zabolotnoy edited by JE.L. Sv intsov a TECHNOSPHERE. Moscow :
Technosphere, 2005.
Ty pes of controllers and the law s of control, PID controllers. Information
portal for the PROCESS CONTROL sy stem. URL:http://automationsy stem.ru/reguly ator/ty pe-of-control.html (date of access: 03.04.2011).
Thomas H.
, Charles I. Layzerson, Ronald L.
, Clifford Stein
Algorithms: construction and analy sis of = INTRODUCTION TO
ALGORITHMS. 2-e izd. M.: «Williams», 2006. WITH. 1296.
.
94 ———————————————————————————————————
. . .
. 2011.
3.