ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДВИГАТЕЛЬ «ДИНАМИКА
реклама

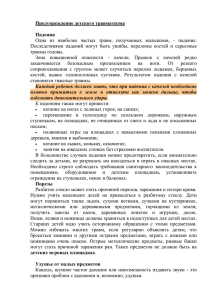
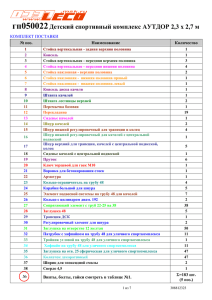
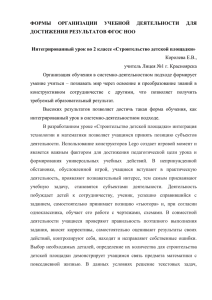
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДВИГАТЕЛЬ «ДИНАМИКА» Кузнецов Леонид Николаевич инженер, РФ, г. Ростов-на-Дону E-mail: [email protected] ELECTROMECHANICAL ENGINE “DYNAMICS” Kuznetsov Leonid engineer, Russia, Rostov-on-Don АННОТАЦИЯ Цель работы — предложить для обсуждения широкому кругу инженеров, специалистов в области электромеханического физики двигателя. и энергетики Отличие принципы предлагаемого работы двигателя от существующих в том, что для поддержания его работы используется не только энергия источников постоянного тока, но и энергия гравитационного поля Земли. Поэтому электромеханический двигатель «Динамика» будет экономически выгоден. ABSTRACT The aim of the article is to offer engineers and experts in physics and power engineering operation principles of electromechanical engine for discussion. The variation of proposed engine from existing ones is in that not only source energy of direct current is used but also energy of earth’s gravitational field for the maintaining of engine performance. That is why electromechanical engine ―Dynamics‖ will be economically advantageous. ______________________________ Кузнецов Л.Н. Электро-механический двигатель «Динамика» // Universum: Технические науки : электрон. научн. журн. 2014. № 8 (9) . URL: http://7universum.com/en/tech/archive/item/1540 Ключевые слова: спецмаховик; добавленная энергия; уравнение энергий. Keywords: special wheel; added energy; energy equation. Введение Теоретически разработаны принципы построения двигателя «Динамика». Состав устройств двигателя: качели с грузами (роботами); механизмы отбора энергии от качелей и передачи еѐ спецмаховику; спецмаховик. Нагрузка двигателя — генератор переменного электрического тока. Качелям извне сообщается потенциальная энергия — механическим усилием они отводятся от положения равновесия на угол γ. Конкретное количество энергии, которое сообщается качелям, зависит от параметров качелей: массы грузов-роботов, массы основания качелей и т. д. Количество качелей, входящих в состав двигателя, зависит от требований к его мощности. В рассматриваемом варианте четверо качелей — минимальное количество. Поддерживается работа двигателя тем, что в каждом полуцикле качания пополняется энергия качелей. При повороте грузов-роботов на угол β добавляется около 17≑18 % первоначально сообщенной потенциальной энергии. Одна часть по преодолению добавленной сил, энергии препятствующих идет на процессу компенсацию качания (сил затрат трения в подшипниках, сил сопротивления воздуха). Вторая часть добавленной энергии отбирается без существенного влияния на процесс качания. В каждом полуцикле одни качели отдают около 60 % энергии, добавленной поворотом грузов. Энергия, затрачиваемая на поворот грузов-роботов, вносится извне. Двигатели, поворачивающие грузы-роботы на угол β, питаются от источника постоянного тока. Умелое использование сил тяжести, сил инерции и сил взаимодействия постоянных магнитов позволяет уменьшить затраты энергии на поворот грузов на 30—35 %. За счет уменьшения энергия, затрачиваемая на поворот грузов, по величине меньше энергии, отдаваемой качелями. В рассматриваемом варианте двигатель «Динамика» может обеспечить устойчивую работу генератора электрической энергии мощностью от 0,8 кВт до 1,0 кВт. Для работы предлагаемого двигателя не нужны традиционные энергоносители — бензин, дизтопливо, газ. I. Оценочный расчет параметров основной составляющей части двигателя «Динамика» - качелей 1. Начальное значение величины потенциальной энергии качелей в наивысшей точке отклонения от положения равновесия. Грузы не отклонены от перпендикуляров к основанию качелей. Положение «тел» грузов показано пунктиром, а положение центров масс — точкой (смотри рис. 1). Рисунок 1. Исходное положение качелей (схема) Центры масс грузов H — высоты подъема центров масс грузов и качелей; γ — угол отклонения центра качелей от исходного положения равновесия, от отвеса ОЦ1 Грузы-роботы обозначены точками и линиями: пунктирные линии — грузы не отклонены от перпендикулярного положения; сплошные линии — грузы отклонены на угол β/2=300, относительно перпендикуляров к основанию качелей. Исходные данные для расчетов: масса каждого груза-робота — 80 кг; масса качелей — 38 кг; угол между боковыми сторонами — 360; размах качания — 1200. Вычислены по рис. 1 высоты: H1'=0,81 м; H2'=1,667 м; Hк=0,8 м, H1''=1,11 м; H2''=1,967 м; Hк=0,8 м. Значение потенциальной энергии вычисляется по формуле: W'n = FTГ·(H1'+H2')+FTК·Hк FTГ и FTК — это силы тяжести грузов и качелей. H — высоты подъема центров масс. W'n = 784·(0,81+1,667)+372,4·0,8 = 2240 Дж. Отпускаем качели от наивысшей точки отклонения — запускаем колебательный процесс. Он будет затухающим. Уравнение динамики колебательного процесса, затухающего колебания. Fвост+Fзат = m·q Fзат — сила, вызывающая затухание пропорциональна скорости основания качелей и направлена противоположно ей. Порождается трением в подшипниках и сопротивлением воздуха процессу качания. Fвост — сила, восстанавливающая колебательный процесс, пропорциональна отклонению качелей от положения равновесия. По аналогии с уравнением сил, будем пользоваться уравнением энергий: Wвост+Wзат = Wначсист Компенсируем силу затухания возмущающей силой Fвозм, приложенной извне. Получим незатухающий колебательный процесс. Уравнение энергий такого процесса: Wвозм+Wвост+Wзат = Wначсист Возмущающая энергия произведена силой, возмущающей колебательный процесс. Значение возмущающей энергии равно по величине энергии затухания. Берем коэффициент потерь системы Кп=0,07. Wвозм= Wзат= Wначсист Кп Wвозм= 2240·0,07=∼157 Дж. 2. Значение потенциальной энергии качелей, когда грузы отклонены на угол β/2=300 (на рис. 1 — сплошные линии). W''n=FTГ·(H1''+H2'')+FTК·Hк W''n = 784·(1,11+1,967)+372,4·0,8 = 2710 Дж. Произошло увеличение потенциальной энергии качелей: △Wп = Wп''– Wп' = 2710-2240 = 470 Дж. Можно рассматривать энергию △W = 470 Дж как возмущающую. При Кп = 0,07 Wзат =∼190 Дж. Значит, если из энергии 470 Дж направить 190 Дж на компенсацию Wзатух., то 280 Дж можно отбирать в каждом полуцикле колебания. Колебательный процесс будет незатухающим, если в конце каждого полуцикла поворачивать грузы на угол β=600. 3. Анализ возможности увеличения отбора энергии. Полученные 280 Дж полезной энергии — это немного. Можно ли увеличить разность потенциальных энергий △Wп= Wвозм> 470 Дж, а следовательно, и увеличить количество отбираемой полезной энергии — Wпол> 280 Дж? а. уменьшение коэффициента потерь. Уменьшение коэффициента потерь до Кп=0,04 даст увеличение полезной энергии с 280 Дж до 360 Дж. Это приемлемое значение, так как можно принять меры, чтобы затраты на поворот грузов были меньше 360 Дж. Но беря Кп=0,07, мы уже имели в виду, что подшипники выбраны с малым коэффициентом потерь — сотые доли. Форма грузов-роботов и всех деталей должна быть обтекаемой (сигарообразной). Никаких плоских поверхностей. Сопротивление воздуха, когда поверхность предмета плоская, в 30 раз больше, чем если поверхность предмета «сигарообразная», точнее говоря «каплеобразная». Получить Кп=0,04, видимо, удастся только в условиях высокогорья, где воздух разряжен; б. увеличение высоты центров масс грузов с 0,8 до 1,0 м. Получим результат: Wвозм=573 Дж; Wзатух=168 Дж; Wпол=405 Дж; в. увеличение массы грузов с 80 кг до 100 кг, без изменения высоты центров масс грузов Wвозм=591 Дж;Wзатух=232 Дж; Wпол=359 Дж; г) увеличение угла первоначального отклонения центра масс с 60 0 до 720, не изменяя другие параметры. Wвозм=976 Дж; Wзатух=225 Дж; Wпол=751 Дж. Для увеличения Wпол нужно уменьшить потери энергии. Немного увеличить высоту грузов. Увеличить угол поворота грузов — угол β. Увеличить угол γ. Вывод: величину возмущающей энергии, величину ее части — полезной энергии — можно увеличить. Необходимо: провести экспериментальные исследования. Выяснить, при каком сочетании параметров качелей можно отбирать небольшое количество полезной энергии. 4. Расчет полупериода колебаний. Отвели качели от положения равновесия на угол γ — сообщили качелям потенциальную энергию, Wпот. — максимальная. Отпускаем качели — запускаем колебательный процесс. Потенциальная энергия переходит в кинетическую энергию — энергию движения — Wк. В точке исходного положения равновесия кинетическая энергия достигает максимального значения. Если пренебречь потерями энергии, то ее значение равно: Wк=Wп. Но значение потенциальной энергии в этой точке равно нолю. Потенциальная энергия перешла в кинетическую полностью. Кинетическая энергия, приобретаемая телом, двигающимся равноускоренно, вычисляется по формуле: Wк= 1/2m·V2 , где: m — масса качелей — 198 кг. V — скорость, достигаемая качелями, когда они пришли в исходное положение равновесия. Но пользоваться этой формулой в рассматриваемом варианте нельзя. Во-первых, качели двигаются по траектории не равноускоренно. Скорость качелей изменяется по косинусоидальному закону. Угол отклонения от исходного положения равновесия максимальный — скорость ноль. Угол отклонения центра качелей от положения равновесия ноль, скорость максимальная. Во-вторых, приведенная формула справедлива для тел, все точки которых двигаются с одинаковой скоростью. В нашем случае скорость движения основания качелей своя — 𝓥1. Скорость движения центров масс грузов по своей траектории 𝓥2. Она, даже если мы не будем поворачивать грузы, в два раза меньше скорости основания: 𝓥1=2 𝓥2. Скорость движения центров масс грузов, когда их поворачиваем на угол β, непостоянна. Сначала грузы двигаются ускоренно, потом их движение замедляется. В-третьих, система качели-грузы не инерциальная система. Действия второго и третьего законов Ньютона в ней нарушаются. Поэтому расчеты будут оценочны. Будем делать допущения, не противоречащие законам физики. Рассчитанная потенциальная энергия качелей Wп=2710 Дж. Из них 190 Дж невозвратные затраты на затухание. Остается значение потенциальной энергии Wп=2520 Дж. Предположим, что все составляющие элементы качелей двигаются по траектории качания равноускоренно и скорость их движения одинакова. Предположим, что общий центр масс находится на дуге отбора энергии, в центре. Энергия Wп=2520 Дж должна перейти в кинетическую энергию. Тогда: Wк=Wп'=m·a·S где: m — масса качелей 198 кг; a — максимальное значение линейного ускорения качелей; S — путь, участок дуги радиуса R=1,6 м, центрального угла 600: S= 1,67 м. Из формулы находим максимальное значение ускорения, получаемое качелями. а = 2520:(198·1,67)=2520:300,66=∼8,38 м/сек2 Из формулы а=W2·R находим значение угловой скорости W2= а:R=8,38:1,6=5,24 1/сек2 W=√5,24=∼2,29 1/сек. Максимальную линейную скорость движения качелей по траектории находим по формуле: 𝓥л=W·R=2,29·1,6=3,664 м/сек. Средняя скорость движения качелей по траектории: 𝓥ср= 𝓥мах:2=3,664:2=1,834 м/сек. Полупериод качания равен: Т/2=3,34м:1,834=1,82 сек. Возьмем время полупериода t=1,8 сек. Проверим правильность расчета. Предположим, что в точке исходного положения равновесия F'цс=Fт. Часть центростремительной силы равна силе тяжести m·q=m· W2·R q= W2·R W2=q:R=6,125 1/сек2 W=√6,125=2,475 1/сек. Максимальная линейная скорость качелей равна: 𝓥л= W·R=2,475·1,6=3,96 м/сек. Средняя скорость движения качелей: 𝓥ср=1,98 м/сек. Время полупериода качания равно: T/2=3,34:1,98=∼1,7 сек. Значения рассчитанных полупериодов близки. Оценочное время полупериода качания, рассчитанное ранее, оставляем: T/2=1,8 сек. Пояснение, почему взяты равными F'цс=Fт. В реальности при движении по окружности существует радиальное ускорение ар. Находить его величину нет смысла. На величину △F=m·ap центростремительная сила может быть больше Fт.. Но направлена сила △F к линейной скорости под углом 900. Значит, она не должна оказывать никакого влияния на величину линейной скорости, по крайне мере никакого существенного влияния. Только Fт разгоняет качели, за счет нее растет величина линейной скорости. Реальное значение рассчитанных выше величин могут дать только эксперименты. Желательно провести их в организации, имеющей достаточный технический уровень, оснащенный приборами, способными произвести измерения с необходимой точностью. 5. Назначение и устройство амортизаторов. а. колебательный процесс, описанный в пункте № 2, может быть неустойчивым. Допустим, по какой-то причине отобралось энергии меньше 280 Дж. Амплитуда колебаний начнет нарастать, чего допускать нельзя. Надо поставить амортизаторы, которые не дадут возможности подняться центру качелей выше первоначального отклонения. Кроме этого, амортизаторы должны выполнить еще несколько важных функций регулятора стабильности работы двигателя: подать сигнал об увеличении амплитуды колебаний до предельно допустимого в случае механического резонанса. Сработает реле давления, подаст звуковой сигнал, отключит поворот грузов и т. д.; подать сигнал об уменьшении амплитуды колебаний ниже расчетного значения и пополнить уменьшение энергии качелей. Если амплитуда колебаний будет ниже расчетного значения длительное время, то автоматика, вмонтированная в амортизатор, подаст сигнал о появлении неисправности, которую необходимо устранять. Устройство и работу амортизаторов рассмотрим в другом разделе. II. Расчет затрат на поворот грузов и оценка возможности их уменьшения 1. Поворот грузов-роботов на угол β а. кратко объясним, как поворачиваются грузы-роботы на угол β. Грузы-роботы стоят в корзинах, опираясь двумя ногами на подшипники, закрепленные на поперечных осях низа боковых сторон качелей. К поперечным боковым сторонам корзин, слева и справа от грузов-роботов, крепятся две выпуклые дугообразные направляющие. Направляющие полосы являются и боковыми сторонами корзин и колеей, по которой ездят центры масс грузовроботов. Внутри корпусов роботов монтируются электродвигатель и источник постоянного тока. Ось электродвигателя должна выходить слева и справа из корпуса робота. Концы оси, выходя из корпусов роботов, являются «руками» роботов. На концы осей-рук жестко крепятся два колеса. Колеса ездят по направляющим, о которых говорилось выше. Электродвигатель возит центры масс-грузов по направляющим, поворачивая грузы. Движение грузов должно быть сначала равноускоренным. Но, как только центры масс прокатились половину направляющей, их движение должно быть замедленным. Это позволит избежать удара груза о поперечную боковую сторону корзины. Исследования, которые будут приведены в другом разделе, показывают, что затраты на поворот каждого груза в отдельности, в одном полуцикле качания различны. Груз, оказавшийся выше на траектории качания, требует меньше затрат на поворот. Грузы-роботы соединены между собой рейкой (связью), прикрепленной к корпусам грузов на шарнирах. В каждом полуцикле качания груз, располагающийся выше, будет «помогать» поворачиваться нижнему грузу через связь. Уменьшится нагрузка на электродвигатель нижнего груза. Исключаются рассогласования в повороте грузов. Автоматика, вмонтированная в связь, подаст сигнал, если рассогласование достигнет критического предела. 2. Рассмотрим кратко процесс движения качелей по траектории. Начиная от одной из высших точек подъема качелей, центр качелей прошел центральный угол 300. Это участок разгона качелей: lp=∼0,84 м., tр=∼0,35 сек. В конце участка разгона грузы-роботы стоят вертикально (на линии отвеса). Именно в этой точке траектории качания надо начинать поворот грузов-роботов на угол β=600. С этой точки начинается участок ускоренного поворота грузов. Чтобы яснее представлять суть происходящих процессов при повороте грузов-роботов, рассмотрим по отдельности их движение в пространстве качания. На траектории движения качелей выделим точки: НПГ — начало поворота грузов; Т — начало отбора энергии качелей, с нее начинается торможение качелей, обусловленное отбором энергии; Ц — исходное положение равновесия; К — конец отбора энергии. На траектории движения центров масс грузов по направляющим выберем точки соответствия: А — начало направляющих, по которым катится центр масс груза; С — середина направляющей; Д — центр масс прокатился по направляющей l=0,67 м; Е — конец направляющей. Если центр качелей находится в точке НПГ, то центр масс находится, в точке А. Груз стоит вертикально. Построим в пространстве траекторию движения центра масс грузов для каждого груза в отдельности. Положение траекторий движения центров масс в пространстве будет специфическим. Знание траекторий поможет глубже понять особенности процессов поворота грузов, облегчит объяснение методики расчета затрат на поворот грузов. а. Верхний груз АЕ — траектория, которую проходит центр масс груза по направляющей. Длина дуги l=∼0,84 м. Время t=0,45 сек. Линейная скорость, средняя 𝓥л=0,84/0,45=1,86 м/сек. Рисунок 2. Положение качелей и верхнего груза перед началом его поворота на угол ß=60° А'Е' — траектория движения верхнего груза в пространстве. Траектория почти прямая, груз движется все время вниз. Рисунок 3. Траектория движения верхнего груза в пространстве Сила давления на качели грузом будет меньше силы тяжести груза: Fт = m·q Определим, на какую величину: когда центр качелей находится в точке начала поворота грузов, величина линейного ускорения равна: апр=aл·соs480=(5:6)·0,7431=3,7 м/сек2 : 4,6 м/сек2 . Сила инерции, действующая на грузы-роботы, направлена вверх и равна: Fи = -m·aпр = -80·4,15 = -332 Н В этой точке сила давления будет равна: Fд = Fт-Fи = 784-332 = 452 Н. Расчет силы давления для остальных точек траектории проводить нет смысла. б. Нижний груз Траектория движения груза-робота по направляющей AE. Часть дуги центрального угла шестьдесят градусов, радиус R=0,8 м. Точки на траектории движения центра масс А, С, Д, Е соответствуют точкам, когда центр качелей находится в точках своей траектории: НПГ, Т, Ц и К. Рисунок 4. Положение качелей и нижнего груза перед началом его поворота на угол ß Траектория движения центра масс грузов-роботов в пространстве почти прямая линия. Небольшой наклон вверх начинается от точки С. Рисунок 5. Траектория движения центра масс нижнего груза в пространстве в. Движение центра масс груза-робота по направляющей в статике (когда качели неподвижны) Выпуклая дуга АЕ длиной l=∼0,84 м, траектория центра масс груза в пространстве. Эту дугу центр масс проезжает за t=0,45 сек. Колеса рук грузов-роботов катятся по направляющей со скоростью: 𝓥л= 0,84/0,45=∼1,86 м/сек. Рисунок 6. Движение центра масс груза-робота по направляющей в статике Центростремительное ускорение направлено вниз (к земле). Его величина ац = 𝓥2/R = 3,5/0,8 =∼4,37 м/сек2 Сила △F направлена в сторону вогнутости направляющей. Величина силы равна: △F = m·aц = 80·4,37 = 349,6 Н. Сила давления — Fq — будет меньше силы тяжести на величину △F Fq = 80·9,8-80·4,37 = 784-349 = 435 Н. Будет ли действовать этот закон физики в динамике, когда качели двигаются по траектории качания? Должен, но окончательный ответ дадут опыты. Но важный вывод можно сделать: затраты на поворот нижнего груза на угол β будут почти такими же, как если бы груз везли по прямой. Однако они будут немного больше, чем затраты на поворот груза, находящегося выше на траектории качания. 3. Расчет затрат на поворот грузов Расчеты носят оценочный характер. Грузы-роботы поворачиваются относительно качелей. Система «качели-грузы роботы» неинерциальная. В ней нарушается действие второго и третьего законов Ньютона. Предположим, что центры масс грузов-роботов по всей траектории качания двигаются равноускоренно. Энергия (работа), затрачиваемая на ускорение груза-робота, рассчитывается по формуле: W=(m·𝓥2):2, где: m — масса груза-робота; 𝓥л — линейная скорость, которую он достигает. Ранее мы получили, что в динамике сила тяжести грузов-роботов меньше, чем если бы грузы-роботы и качели были неподвижны. Но чтобы не проводить лишних пересчетов, возьмем массу двух грузов m=160 кг. Точная длина направляющей l= 0,8373 м. Время прохождения этой длины центром масс грузов t=0,45 сек. Средняя скорость движения грузов равна: 𝓥ср=0,834:0,45=1,86 м/сек. Ранее указывалось, что поворот грузов-роботов сначала идет ускоренно. Потом, на второй половине направляющей, их движение замедляется. Чтобы не делать пересчетов, будем считать, что на всей направляющей скорость движения грузов-роботов равноускоренная. Максимальное значение ее 𝓥мах=𝓥ср=1,86 м/сек. Ошибки не будет. Находим величину энергии, затрачиваемой на равноускоренный поворот грузов: Wзатр = 1/2·mгр·𝓥2 = 160·3,146/2 = 278 Дж. Полученная величина энергии затрат практически равна величине полезной энергии, отбираемой у качелей. Но силы инерции, возникающие при отборе полезной энергии, уменьшают затраты. На какую величину уменьшатся затраты энергии на поворот грузов, рассчитаем в следующем пункте. 4. Расчет уменьшения затрат на поворот грузов-роботов на угол β. Длина дуги передачи энергии равна 1,2 м. Она выходит за пределы поперечных боковых сторон основания качелей для того, чтобы обеспечить надежный захват колеса механизма отбора энергии. Время отбора полезной энергии около 0,45 сек. Отбор энергии затормозит качели. Из формулы: W = F·S = m·aт·S, где: m — масса качелей — 198 кг, S — длина дуги передачи энергии — 1,2 м, aт — ускорение торможения качелей, находим: aт = W:(m·S) = 280:(198·1,2) =∼1,18 м/сек2 Центры масс грузов получают ускорение относительно качелей, ускорение инерции. Предположим, оно равно половине aт, хотя, наверное, надо брать ат= aи аи= aт:2=1,18:2=0,59 м/сек2 Сила инерции разгоняет, увеличивает скорость центров масс-грузов относительно качелей. Затраты энергии на поворот грузов сократятся на величину △W=F·S1=mгр·аи·S1, где: m — масса двух грузов — 160 кг, аи — ускорении инерции аи — 0,59 м/сек2, S1 — длина направляющих, по которым едут центры масс, S1=0,84 м, △W=160·0,59·0,84=∼79 Дж. С учетом действия сил инерции затраты энергии на поворот грузов будут равны. Wзат = 278-79 = 199 Дж≈200 Дж. Получим Wзат<Wпол. Величина полезной энергии может быть увеличена. 5. Рассмотрим действие сил Кориолиса на процесс качания. Что происходит, когда люди качаются на качелях? В точке наивысшего подъема качелей человек приседает. Изменяется длина плеча приложения силы тяжести, увеличивается раскручивающийся момент. Но не эти изменения играют главную роль в процессе качания. Когда качели пошли вниз, упираясь ногами в основание качелей и держась за металлические трубы боковых сторон, человек резко ускоряет свое тело относительно радиуса качания – боковой стороны. Тело человека движется от основания к центру качания. На тело человека действует сила Кориолиса, направленная в сторону хода качелей. Величина силы Кориолиса вычисляется по формуле: Fк = 2m·𝝎·𝓥, где: 2 — коэффициент m — масса человека, m = 80 кг, 𝝎 — угловая скорость 𝝎 = 2,48 1/сек, 𝓥 — скорость движения человека к центру качания. Даже при небольшой скорости движения тела человека от основания качелей к центру качания сила Кориолиса играет главную роль в поддержании качания. Допустим, 𝓥=1 м/сек Fк = 2·80·2,48·1 = ∼397 Н Чем больше скорость движения тела человека относительно радиуса качания (боковой стороны качелей), тем больше сила Кориолиса. Значит, кинетическая энергия качелей возрастает на большую величину. 6. Расчет величины силы Кориолиса для рассматриваемой системы Было бы, наверное, идеально, если бы на качели поставить роботов, которые воспроизводили бы действия людей. Чтобы их начали разрабатывать и создавать, надо на рассматриваемом варианте качелей доказать, что это экономически выгодно. Обратимся к схеме, когда центр качелей прошел 300 от наивысшей точки подъема. Из центра вращения качелей, через центры масс грузов проведем радиусы до траектории качания. Рассмотрим верхний груз (см. рис. на стр. № 9). Расстояние от траектории качания до его центра масс будет равно ∼0,42 м. Когда центр качелей будет находиться в точке исходного положения равновесия, центр масс груза должен лежать на боковой стороне. Расстояние от траектории качания до него — 0,8 м. Разность расстояний: △R=0,8-0,42=0,38 м. Время, затраченное на «прохождение» △R=0,38 м равно t=0,3 сек. Величина радиальной скорости 𝓥р=0,38:0,3=∼1,27/сек. Значение 𝝎=2,48 1/сек брать нельзя. Отбор энергии уменьшит значение угловой скорости. Оценочное значение 𝝎'=∼2,0 1/сек Найдем величину силы Кориолиса: Fк=2 ·𝝎'·m·𝓥р=2·80·2·1,27=405 Н. Если проведенные расчеты верны для нашей неинерционной системы, то именно эта сила должна увеличивать кинетическую энергию качелей на участке ускоренного поворота грузов. На остальном участке поворота грузов центры масс будут двигаться от центра качания к траектории движения. Сила Кориолиса должна тормозить движение качелей. Но ее величина будет меньше, чем величина рассчитанной выше силы. Уменьшается значение радиальной скорости. Уменьшается значение угловой скорости на остальном участке поворота грузов. Заключение Получили результаты расчетов: затрачиваем на поддержание колебаний 200 Дж энергии; можем отбирать 280 Дж полезной энергии. Если силы Кориолиса внесут свой «вклад», то 150 Дж. Парадокс? Но результаты опытов могут дать положительный ответ. Это может быть реально. Так получается потому, что умело используются силы инерции, силы тяготения, силы Кориолиса. До минимума сведены потери энергии. В первую очередь потери энергии в процессе качания. Поясним изложенное. 1. Процесс отбора энергии тормозит качели. Уменьшаются угловая и линейная скорости движения качелей по траектории качания. Исключить торможение нельзя. Любой метод отбора энергии затормозит качели. Но если исключить нельзя, то надо использовать для получения пользы в процессе поворота грузов. В одном процессе теряем, в другом получаем пользу — уменьшаем затраты на поворот грузов. 2. Поворот грузов-роботов начинается, когда край спецдуги касается вала механизма отбора. Центр качелей прошел по траектории качания 30 0, до исходного положения равновесия ему еще остается 300. Величина сил, прикладываемых к грузам, при повороте на угол β будет меньше. Если бы поворот осуществлялся вблизи точек наивысшего подъема качелей, затраты на поворот были бы намного больше. Приведем пример. Груз на тележке легче везти по ровной местности, а по наклонной плоскости вверх тяжелее. И прилагаемые усилия и затраты будут больше. Получаем выигрыш в затратах на поворот грузов. Величина разности потенциальных энергий △Wп=Wвозм не зависит от того, где мы повернем грузы-роботы на угол β. 3. Известно, что самое большое усилие прилагается при начале движения, когда преодолевается инерция покоя, в любом движении. Когда движение началось, усилие уменьшается. Это надо использовать: с большой точностью совместить начало торможения и начало работы двигателя, расположенного внутри груза-робота. Это позволит снизить нагрузку на двигатель в начале работы. 4. Очень важно, чтобы амортизаторы были регулятором процесса качания. Они должны пополнять энергию качелей, если есть такая необходимость, за счет сил взаимодействия магнитов. Делается попытка доказать возможность и целесообразность разработки простого, но экономичного электромеханического двигателя. В этом двигателе помогают получить полезную энергию сила инерции и сила Кориолиса. Сила инерции эквивалентна силам тяготения. Ее действия проявляются потому, что существует гравитационное поле Земли, препятствующее всякому изменению ускорения тела относительно него. Сила Кориолиса отличается от силы инерции тем, что она зависит от скорости движения тела относительно вращающейся системы отсчета. По сути, и здесь гравитационное поле Земли препятствует изменению Кориолисового ускорения тела относительно него. Силы гравитации могут или тормозить, или ускорить движение тел. Задача стоит в том, что чтобы там, где силы гравитации ускоряют движение тела, т. е. увеличивают кинетическую энергию тела, использовать это явление. И небольшую часть энергии тела отбирать. Нарушения закона сохранения энергии нет. То, что в каждом полуцикле можно отбирать небольшую часть энергии качелей, не вызывает сомнения. Приведем пример. Дети качаются на качелях. Амплитуда колебаний нарастает с каждым полуциклом. Через некоторое время она станет такой, что они могут упасть с качелей. Разгон качелей прекращается. А если не прекращать разгон качелей, а отбирать небольшую часть энергии в каждом последующем полуцикле? Отбирать необходимо столько энергии, чтобы амплитуда колебаний оставалась постоянной. Это можно сделать. Вместо детей, ставим роботов, и процесс отбора энергии будет длиться столько времени, пока источники питания, расположенные внутри роботов, будут обеспечивать их работоспособность. Отбирать энергию можно, вопрос в другом: можно ли, приняв меры, сделать так, чтобы гравитационной поле Земли своей энергией помогло нам добиться поставленных целей? А именно добиться, чтобы величина отбираемой энергии была больше величины энергии, затрачиваемой на поддержание колебания (в каждом полуцикле качания). В простых машинах и механизмах этого сделать нельзя: движения в них происходят в инерциальной системе. В нашем неинерциальной случае движения системе. роботов происходят Взаимодействие ускорений в качающейся тел роботов с гравитационным полем Земли более сложное. Ускорение Кориолиса ³:a=2v*w пропорционально произведению двух независимых скоростей. w — угловая скорость вращающейся системы, v — линейная скорость тела, направленная по радиусу. Расчеты и рассуждения, приведенные в статье, показывают, что можно получить выигрыш в получаемой полезной энергии. Для этого необходимо: там, где гравитационной поле Земли увеличивает кинетическую энергию роботов, сделать это увеличение максимальным. там, где оно уменьшает кинетическую энергию роботов, сделать это уменьшение минимальным. Это можно делать, резко изменяя линейную скорость движения роботов по радиусу. Необходимо использовать и силу инерции для уменьшения затрат на поворот грузов. Комплекс мер может дать желаемый результат. Лет сто назад предложение разработать такой двигатель вызвало бы непонимание в связи с наличием богатых запасов угля, нефтепродуктов, газа. Паровые турбины, дизельные и бензиновые двигатели обеспечивают любые мощности. Однако бытовая техника энергозатратна. Что такое 0,8 кВ, 1,0 кВ и т. д.? Но природные энергоносители быстро истощаются — бытовая техника стала энергосберегающей. И надо думать о будущем. Гидроэнергоресурсов на земле не так уже много. Атомная энергетика небезопасна, да и запасы радиоактивных веществ на земле не беспредельны. Предлагаемый двигатель может быть применен для получения электроэнергии, для подъема воды из скважин, для приведения в действие небольших мельниц помола зерна и т. д. Если результаты экспериментов будут положительны, то двигатель «Динамика» может быть с успехом использован в частных хозяйствах и на мелких фирмах. Варианты конструкции устройств двигателя будут рассматриваться в следующих разделах работы. Список литературы: 1. Анурьев В.И. Справочник конструктора-машиностроителя. В 3-х томах. М.: Машиностроение, 1982. 2. Астахов А.В. Курс физики / А.В. Астахов, Ю.М. Широков. Т. 1. М.: Наука, 1977. 3. Курс физики / под ред. проф. В.Н. Лозовского. СПб.: Лань, 2006. 4. Кухлинг Х. Справочник по физике / пер. с нем. под ред. Е.М. Лейкина. М.: Мир, 1955. 5. Ландау Л.Д. Курс общей физики / Л.Д. Ландау, А.И. Ахиезер, Е.М. Ливщиц. М.: Наука, 1969. 6. Элементарный учебник физики / под ред. акад. Г.С. Ландсберга. Т. 1. М.: Физматлит, 2006.