А.О. Пивоваров (магистрант), В.П. Шевчук (к.т.н., профессор)
реклама
, В.П. Шевчук (к.т.н., профессор)")
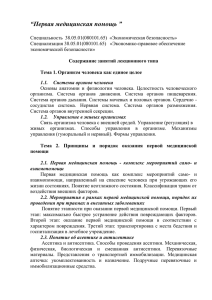
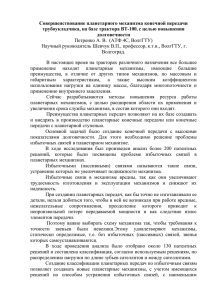
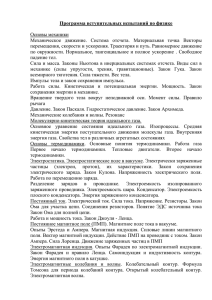
А.О. Пивоваров (магистрант), В.П. Шевчук (к.т.н., профессор) МОДЕРНИЗАЦИЯ ПЛАНЕТАРНОГО МЕХАНИЗМА ПОВОРОТА С ЦЕЛЬЮ ПОВЫШЕНИЯ ЕГО НАДЕЖНОСТИ И ДОЛГОВЕЧНОСТИ Волгоград, Волгоградский государственный технический университет. Планетарными называют передачи, имеющие зубчатые колеса с перемещающимися геометрическими осями. Движение этих колес, называемых планетарными или сателлитами, сходно с движением планет, отчего передачи и получили свое название. Существенное повышение качественных показателей планетарных передач достигается путем устранения избыточных связей. [1,2] Важно выбирать схему механизма так, чтобы требования к точности звеньев были невелики. Этому удовлетворяют механизмы, статически определимые, т. е. без избыточных (пассивных) связей, звенья которых самоустанавливаются. Избыточными (пассивными) связями называются такие связи, устранение которых не увеличивает подвижности механизма. Размеры звеньев могут изменяться и во время эксплуатации вследствие просадки фундамента, износа и регулировки зазора кинематических пар, упругих деформаций, (например, прогибов валов), расширения от нагрева, а также ошибки при ремонте и сборке (например, если перепутали вкладыши подшипников). На статически определимый механизм изменение размеров звеньев не влияет. Следовательно, статически определимые механизмы дают не только снижение трудоемкости, но и одновременно повышают надежность. [1,2] Избыточные связи в механизме вредны, так как они увеличивают трудоемкость изготовления и эксплуатации механизмов и снижают их надежность. Проверить механизм на наличие в нем избыточных связей можно путем подсчета их по структурным формулам. Формула предложена Малышевым А. П. [1,2]: i =5 q = w − 6n + ∑ ipi i =1 (1) или в развернутом виде: q = w − 6n + 5 pV + 4 p IV + 3 p III + 2 p II + p I (2) где q – число избыточных связей; n – число подвижных звеньев; w – подвижность механизма; pi – число кинематических пар i-го класса, накладывает ipi условий связи. Проверим на избыточные связи дифференциальный механизм поворота (дмп) трактора Четра 6С315 формула (3), представленного на Рис.1,слева чертеж, справа структурная схема: Рис.1 дмп трактора Четра 6С315. ДМП Четра 6С315 работает при прямолинейном движении следующим образом с вала заднего моста 1, момент передается на водило 2, в котором на осях 3 установлены четыре сателлита 4. Сателлиты 4 обкатывают солнечную шестерню 7, установленную на шестерни 8, остановленной гидромотором и передают момент на коронную шестерню 5, установленной на барабан 6, который передает момент на конечную передачу. В данном механизме плавающими являются солнечная и коронная шестерни, имеющие шлицевое соединение (карданное на структурной схеме): q = 1 − 6 ⋅ 8 + (5 ⋅ 6 + 4 ⋅ 2 + 2 ⋅ 2 ⋅ 4) = 1 − 48 + 54 = 7 (3) Для сравнительного анализа проверим на избыточные связи обычный планетарный механизм поворота[1,2,3], используемый на ДТ-75 (ПМП ДТ-75) с 3 и 4 сателлитами (Рис. 2 слева), формула 4 и механизм Шаткуса[1,2] с 3 и 4 сателлитами (Рис. 2 справа), формула 5. q 3 = 1 − 6 ⋅ 5 + (5 ⋅ 5 + 2 ⋅ 2 ⋅ 3) = 1 − 30 + 37 = 8 q 4 = 1 − 6 ⋅ 6 + (5 ⋅ 6 + 2 ⋅ 2 ⋅ 4 ) = 1 − 36 + 46 = 11 (4) q 3 = 1 − 6 ⋅ 6 + (5 ⋅ 2 + 4 ⋅ 1 + 3 ⋅ 3 + 2 ⋅ 2 ⋅ 3) = 1 − 36 + 35 = 0 q 4 = 1 − 6 ⋅ 7 + (5 ⋅ 2 + 4 ⋅ 1 + 3 ⋅ 4 + 2 ⋅ 2 ⋅ 4) = 1 − 42 + 42 = 1 (5) Рис. 2 ПМП ДТ-75 и механизм Шаткуса (1-солнечная шестерня, 2сателлит, 3- коронная шестерня, 4 - водило). Рассмотрим ПМП в котором водило выполнено в виде браслета Рис. 3 и проверим на избыточные связи формула (6): q 3 = (1 + 1 + 3) − 6 ⋅ 11 + (5 ⋅ 5 + 4 ⋅ (3 + 3) + 2 ⋅ 2 ⋅ 3) = 5 − 66 + 61 = 0 q 4 = (1 + 1 + 4) − 6 ⋅ 14 + (5 ⋅ 6 + 4 ⋅ (4 + 4) + 2 ⋅ 2 ⋅ 4) = 6 − 84 + 78 = 0 (6) Рис. 3 ПМП в котором водило выполнено в виде браслета. Как видно ПМП ДТ-75 имеет набольшее число избыточных связей, 11 при 4-х сателлитах, ДМП Четра 6С315 имеет на 4 меньше, то есть 7, за счет исполнения коронной и солнечной шестерни плавающей. Механизм Шаткуса не имеет избыточных связей при 3-х сателлитах и одну избыточную связь при 4-х сателлитах, что достигается за счет исполнения солнечной шестерни подвижной и установкой сателлитов на сферических подшипниках. ПМП в котором водило выполнено в виде браслета не имеет избыточных связей при 3-х и 4-х сателлитах. Для уменьшения числа избыточный связей в механизме Четра 6С315, и уменьшения их влияния на механизм, рекомендуется использовать техническое решение Шаткуса или ПМП “браслет”, однако использовать механизм Шаткуса для данного механизма не представляется возможным, так как габаритные размеры сателлитов малы для установки их на сферический подшипник. Кроме того, данная планетарная передача не обладает возможностью самоустановки водила с сателлитами под воздействием радиальных и тангенциальных сил, возникающих в зацеплениях сателлитов с центральными колёсами, что снижает ее надежность и долговечность. Использование на тракторе Четра 6С315 ПМП “браслет”, избавит механизм от избыточных связей, что значительно увеличит его ресурс, долговечность работы, избавит от излишних поломок во время эксплуатации. Список литературы. 1. Пузырев, Н.М. Теория механизмов и машин / Н.М. Пузырев: учебное пособие. Тверь: ТГТУ, 2006.- 120 с. 2. Решетов, Л.Н. Самоустанавливающиеся механизмы: Справоч- ник.– М.: Машиностроение, 1991.– 288 с.