UA9FAD — Практика использования Beam rotator controller VK5DJ
реклама

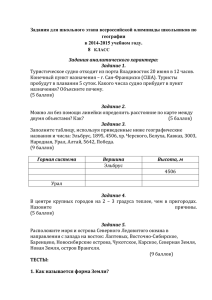
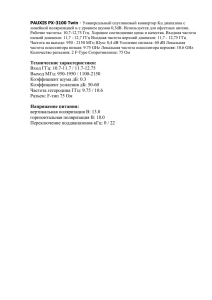
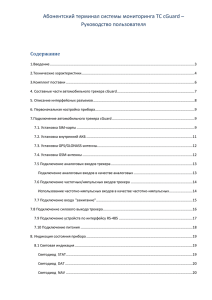
Практика использования Beam rotator controller VK5DJ. При освоении СВЧ-диапазонов радиолюбитель сталкивается с проблемой точной установки антенны – ведь лепесток параболической антенны сужается пропорционально частоте. На сайте VHFDX.ru в теме Прецизионная поворотка своими руками этой проблеме посвящено обсуждение на 22 страницах. Изучив и подытожив материал группа пемских энтузиастов приняла решение остановить выбор на конструкции VK5DJ. Аргументы: наличие технической документации, проработанность различных вариантов, возможность трекинга Луны и Солнца без подключенного компьютера (полезно на выезде, когда ресурс ноутбука загружен другими приложениями), успешная эксплуатация трекера такими авторитетами как VK3UM, опыт эксплуатации в России UA9YLU, сравнительно недефицитные детали и доступность 12 bit магнитных энкодеров AS5045, обеспечивающих точность 0.1 градуса. На сайте автора более чем достаточно информации: Джон отдал много времени и сил для своего проекта – разработано множество вариантов, проект совершенствовался и менялся сайт. Легко запутаться в этом море информации; возможно, поэтому многих отпугивает эта конструкция. Ниже можно видеть основные схемы и узлы в «пермском» варианте. Схема пульта управления Shack unit – блок управления с четырёхстрочным индикатором WinStar WH4004A-YYHCT, который позволяет наблюдать необходимую информацию в процессе работы, выполнен в металлическом (дюралевом) корпусе. Печатная плата переработана UA9FA – удалена микросхема MAX232, т.к. не планируется использовать соединительный кабель более 30м и помех меньше, часы разведены непосредственно на плате, не задействован порт управления тормозом электродвигателя, но возможность использовать его оставлена. UA9FA развёл плату на одностороннем стеклотекстолите для простоты изготовления. Монтаж комбинированный – присутсвуют ЧИП и обычные детали. Часы отсутствуют на принципиальной схеме, но присутствуют на печатной плате. Плата пульта Соединительный кабель – сетевой четырехпарный экранированный категории CAT5CAT6 с разъемами DB9. Энкодеры самодельные – азимутальный сделан из потенциометра СП-1, для элевации инклинометр гравитационного типа по идее UN7GK , но без демпфирующих магнитов http://forum.vhfdx.ru/povorotnye-ustroystva/precizionnaya-povorotka-svoimi-rukami/242/ Схема контроллера Азимут - Элевация Плата контроллера Азимут - Элевация Плата энкодера as50-45 Вид Монтаж внутри Первое настоящее испытание трекера провели на выезде в Полевом дне.. В качестве поворотного устройства использовали переделанный редуктор МПК. Переделка свелась к замене электродвигателя – установлен подходящий по размеру с дополнительным редуктором. В результате скорость на валу снизилась с одного оборота в минуту до одного оборота в пятнадцать минут при полном напряжении и одного оборота в тридцать минут при пониженном напряжении. При пониженной скорости вращения становится возможным установить в меню точность трекинга 0.3 градуса. Дальнейшее увеличение точности (максимально до 0.1 градуса) приводит к возникновению автоколебаний. Необходимо дальнейшее снижение скорости. Автор работал над этой проблемой (видимо по мере появления более точных энкодеров), в версии 9.51 использовался порт RB0 с ключом для включения тормоза двигателя (при наличии двигателя с тормозом). В версиях 12 для регулировки скорости электродвигателя имеется возможность использования ШИМ-контроллера. В дальнейших его планах использование управления двигателем по шине I2C. Еще одна проблема для достижения высокой точности – люфты редуктора. Так наш редуктор с планетарной передачей имеет люфт около 3-5 градусов, что неприемлемо даже для диапазона 5.7 гГц с тарелкой 90см, имеющей ширину диаграммы 4 градуса. А тарелка 24 гГц имела ширину диаграммы 1.6 градуса. Полевой день 2015г. Об этой проблеме говорил на прошлой конференции Анатолий UA4HTS, она обсуждается на соответствующих радиолюбительских форумах. Безлюфтовые редукторы малодоступны и дороги, поэтому часто применяется торсион – натяжка редуктора в одну сторону. Сила натяжения должна быть достаточной, чтобы справляться с ветром, поэтому редуктор должен иметь запас мощности. Наш переделанный МПК обеспечивал усилие несколько десятков кг/м – в полевом варианте мы соорудили торсион из эластичного резинового кольца, которое одевают на газовый баллон при транспортировке. Этот резиновый торсион прекрасно справлялся с задачей при ветре 3-5 м/сек. Для более сильного ветра приготовлено второе кольцо, которое не потребовалось. Было очень приятно, когда сориентировав антенну на R4YM (5,7 гГц) по расчетному азимуту услышали желанный сигнал и попытки более точной ориентации приводили лишь к ослаблению сигнала. Следует заметить, что основное назначение трекера – работа через Луну. Для работы в соревнованиях надо иметь возможность менять скорость (желательно автоматически) в десять – двадцать раз. Надеюсь это будет решено в будущем.