2. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ 2.1 Классификация
реклама

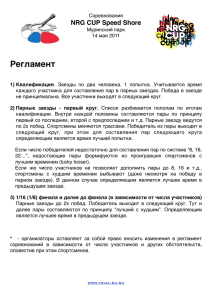
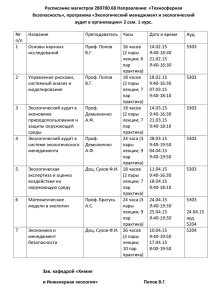
3 2. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ 2.1Классификация кинематических пар 2.2Этапы структурного анализа 2.3Структура подвижных соединений 2.4Структура механизмов с гибкими связями 2.5Класс контура и механизма 2 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ 2.1 К л а с с и ф и к а ц и я к и н е м а т и ч е с к и х п а р Кинематические пары классифицируют по числу h условий связи (ограничений), накладываемых элементами пары на движение одного звена относительно другого. Так как для свободного тела в трехмерном пространстве число степеней свободы Н равно шести (три поступательных движения и три вращательных относительно трех осей), то величины Н и h связаны соотношением: Н = 6 –h, где h = 1, 2, 3, 4, 5. При h=0 пары не существует, а при h=6 соединение звеньев становится неподвижным. По величине h определяют класс пары. Ниже приведены примеры наиболее употребимых пар (табл. 2.1). Другие подвижные соединения образованы сочетаниями показанных в таблице кинематических пар и называются кинематическими соединениями. Например, так называемая винтовая пара есть кинематическое соединение цилиндрической и односторонней (линейной либо точечной) пар. Т а б л и ц а 2.1 - Классификация кинематических пар двухсторонние Тип Название Класс Подвижность Вращательная 5 1 Поступательная 5 1 Цилиндрическая 4 2 Сферическая 3 3 Обозначение однострониие 4 2 4 1 5 Линейная Точечная Возможные движения (подвижности) в пространстве иллюстрируются с помощью трехмерной системы координат, в которой каждое несвязанное звено может совершать три продольных движения вдоль каждой из осей и три круговых (рис.2.1). Наложение структурных связей уменьшает число возможных движений (подвижностей). Например, вращательная и поступательная пара допускают только одно возможное движение, значит, они накладывают пять структурных связей (ограничений). Цилиндрическая пара допускает две подвижности – одну вращательную, другую поступательную, в этом случае число связей равно четырем, и, соответственно, класс цилиндрической пары определяется как четвертый и так далее. Элементами кинематических пар Y называются различные поверхности, точки или линии, которыми звенья соединяются (соприкасаются) между собой. Например, элементом точечной пары является точка, X линейной – линия, в сферической паре звенья соединяются сферами, поэтому ее элементами Z являются сферы, элементами цилиндрической пары являются цилиндрические поверхности. Рис. 2.1. Возможные Вращательная пара составлена из цилиндра и движения в трехмерном торцовых плоскостей, а поступательная – их пространстве нескольких плоскостей, поэтому называются составными. 2.2 Э т а п ы с т р у к т у р н о г о а н а л и з а Структурный анализ любых механизмов, в том числе механизмов с гибкими связями, состоит в определении двух структурных характеристик степени аномальности структуры S и степени иррациональности структуры s. Степень аномальности структуры S определяет баланс структурных связей и подвижностей вдоль линии структурно-кинематической цепи: S = 3n - 2(p5 + p4 + p3) - p2 - p1 - p0, (2.1) где n - количество подвижных звеньев; p5 – количество кинематических пар пятого класса; p4 – количество кинематических пар четвертого класса; 5 p3 – количество кинематических пар третьего класса; p2 – количество кинематических пар второго класса; p1 – количество кинематических пар первого класса; p0 - количество входных связей, обозначаемых на схеме стрелкой (число стрелок). В этой формуле коэффициент 2 перед суммой пар пятого, четвертого и третьего классов означает, что связь, которую они образуют вдоль линии структурно-кинематической цепи, двухсторонняя - на растяжение и сжатие, в отличие от связи, образованной парами второго и первого классов, а также входными связями, - односторонней. Коэффициент 3 перед количеством подвижных звеньев показывает, что каждое звено, на которое не наложено ни одной структурной связи, может иметь в пространстве три возможных продольных движения вдоль осей координат. Cтепень аномальности структуры S определяет баланс структурных связей и подвижностей вдоль линии структурно-кинематической цепи. Если структура нормальна, то S = 0 и число структурных связей равно числу подвижностей в продольном направлении, и движение входного звена вызовет адекватное изменение положения остальных звеньев цепи. Если S>0, структура адаптивна, а получившееся в результате расчета целое число равно количеству лишних подвижностей вдоль линии цепи, если S структура индифферентна, а результат равен числу избыточных связей вдоль линии контура, образованного структурно-кинематической цепью. Поскольку структурнокинематическая цепь образована не только осями звеньев, но и осями кинематических пар, по отношению к ним структурные связи действуют следующим образом: лишние подвижности вдоль линии цепи адекватны лишним подвижностям вокруг осей кинематических пар, а избыточные связи вдоль линии цепи означают ограничение подвижности вокруг осей кинематических пар. Cтепень иррациональности структуры s определяется на втором этапе структурного анализа по формуле: s = 3n - 3p5 - 2p4 - p3 - p2 (2.2) В этой формуле коэффициент 3 перед количеством подвижных звеньев означает, что каждое несвязанное звено может иметь три круговые подвижности относительно трех осей координат, а коэффициенты перед количеством кинематических пар показывают, сколько поперечно-угловых (круговых) структурных связей накладывает кинематическая пара соответствующего класса. Легко видеть, что сумма коэффициентов перед парами соответствующего класса в двух формулах (2.1) и (2.2) равна классу пары. Кинематические пары первого класса и входные связи поперечноугловых связей не накладывают, поэтому не входят в формулу (2.2). Степень иррациональности структуры s определяет баланс структурных связей и подвижностей вокруг и поперек линии контура цепи. При s=0 структура рациональна, при s<0 результат показывает число контурных 6 (поперечно-угловых) избыточных связей. При s>0 в структурной цепи имеются лишние подвижности вокруг линии цепи, либо вдоль осей кинематических пар. Линейная модель показывает действие структурных связей относительно звеньев структурно-кинематический цепи (рисунок 2.2). Продольные связи S1 и S2 действуют вдоль линии контура на растяжение и сжатие, либо на ее удлинение и укорочение. Двусторонние кинематические пары пятого, четвертого и третьего классов действуют вдоль цепи и на сжатие, и на растяжение, а односторонние второго, первого классов и входные связи – только на сжатие либо только на растяжение. К поперечно-угловым относятся три вида связей: sT действует на кручение вокруг линии контура, sM действует на ее изгиб и sQ – на сдвиг. Таким образом, максимальное количество избыточных связей в одном контуре не может превышать трех. S1 sQ S2 s sM Рисунок 2.2 - Линейная модель структурно-кинематической цепи Предложенная последовательность структурного анализа пригодна для исследования структуры любого механизма или кинематической цепи независимо от назначения, взаимного расположения звеньев и кинематических пар и сложности. Различие может состоять только в уровне исследования, то есть каждый механизм или кинематическая цепь может исследоваться в соответствии с заданной точностью. Первый уровень, как правило, состоит в определении структурных характеристик проекции схемы на плоскость, или “плоской”, как принято называть, схемы. Поскольку традиционно в теории механизмов в качестве примеров приводится шарнирный четырехзвенник, исследуем его в разных уровнях (рисунок 2.3). Степень аномальности структуры: S = 3n - 2p5 - p0 = 3∙3 - 2∙4 - 1 = 0, то есть структура нормальна. C B A D Рисунок 2.3 - Первый уровень исследования структуры 7 шарнирного четырехзвенника. Степень иррациональности структуры: s = 3n - 3p5 = 3∙3 - 3∙4 = -3, то есть контур содержит три избыточные связи. Второй уровень предполагает исследование пространственной схемы механизма с учетом повторяющихся связей, не видимых на плоской схеме (рисунок 2.4). C B D2 A2 A1 D 1 Рисунок 2.4 - Второй уровень исследования структуры шарнирного четырехзвенника. Степень аномальности структуры: S = 3n - 2p5 - p0 = 3∙3 - 2∙6 - 1 = -4. Степень иррациональности структуры: s = 3n - 3p5 = 3∙3 - 3∙6 = -9, что предполагает наличие трех независимых контуров - ABCD, A1A2 и D1D2 . Последние два контура образованы повторяющимися вращательными парами А и D и содержат только по одному подвижному звену, ось вращения которого совпадает с осями данных пар. Третий уровень исследования структуры позволяет уточнить распределение структурных связей и подвижностей по контурам (рисунок 2.5). Исходя из определения независимого контура, при поконтурном определении структурных характеристик в каждом последующем контуре не учитываем те структурные параметры, которые уже были посчитаны в предыдущих контурах. С3 С 1 С 2 Рисунок 2.5 - Поконтурный анализ структуры∙ 8 Обозначим полученные три контура как С1, С2 и С3. Каждый из этих трех контуров содержит по одному подвижному звену, по две вращательные пары и три контурных избыточных связи: s1 = 3n - 3p5 = 3∙1 - 3∙2 = -3, s2 = 3n - 3p5 = 3∙1 - 3∙2 = -3, s3 = 3n - 3p5 = 3∙1 - 3∙2 = -3. Степень аномальности каждого контура S1 = 3n - 2p5 - p0 = 3∙1 - 2∙2 - 0 = -1, S2 = 3n - 2p5 - p0 = 3∙1 - 2∙2 - 0 = -1. В контуре S3 учитываем только одно подвижное звено - шатун, не вошедший в расчет в первых двух контурах, а также две вращательные пары и входное звено: S3 = 3n - 2p5 - p0 = 3∙1 - 2∙2 - 1 = -2. Очевидно, что S = S1 + S2 + S3 = - 4, а s = s1 + s2 + s3 = - 9, то есть сумма структурных характеристик, определенных поконтурно, равна общей степени аномальности и степени иррациональности всего механизма. Что касается степени иррациональности, то выше было показано, что любой замкнутый контур независимо от числа звеньев содержит три избыточные связи, если он образован парами только пятого класса. Известно и распределение этих избыточных связей относительно линии контура - они действуют на кручение, изгиб и сдвиг линии контура структурнокинематической цепи. Остановимся подробнее на степени аномальности, равной S = -4 для всего механизма и S1 = -1, S2 = -1, S3 = -2 для контуров. Как следует из первой и второй глав, признаком индифферентных по структуре цепей является возможность создания натяга вдоль линии цепи. Действительно, как следует из рисунка 2.6, между вращательными парами А1 и А2 можно создать натяг, который зависит от разности размеров между подвижными и неподвижными элементами пар. Таким образом, индифферентная структурная связь накладывает кинематическое условие равенства указанных размеров, в противном случае узел невозможно собрать. А2 A2 A1 А1 а) б) Рисунок 2.6 - Однозвенная структурно-кинематическая цепь: 9 а) плоская схема с соосными кинематическими парами; б) пространственная схема с произвольными осями кинематических пар В случае соосности кинематических пар А1 и А2 , то есть при определенных кинематических условиях, обеспечивается подвижность звена и возможность создания постоянного усилия в индифферентной связи, не зависящего от положения звена (рисунок 2.6,а). При этом действие контурных избыточных связей компенсируется указанными условиями, относящимися к взаимному расположению осей кинематических пар и звена. Сказанное касается контуров, образованных звеньями А1А2 и D1D2, но в контуре А1А2 имеется еще и входное звено, или входная связь, действие которой аналогично любой другой индифферентной связи вдоль линии контура (или вокруг осей кинематических пар, в данном случае совпадающих с осью звена). Пространственное изображение однозвенной цепи (рисунок 2.6, б) с произвольным расположением осей кинематических пар показывает возможность одновременного действия одной продольной и трех поперечноугловых избыточных связей. Таким образом, из приведенного примера можно сделать важный вывод: поскольку при исследовании структуры не учитываются размеры и взаимное расположение звеньев и осей кинематических пар, необходимо структурную схему целенаправленно располагать произвольно, то есть намеренно искажать, чтобы исключить влияние различных кинематических условий на субъективное зрительное восприятие. Независимость структурных характеристик покажем на примере того же шарнирного четырехзвенника (см. рисунок 2.3). Степень аномальности cтруктуры механизма шарнирного четырехзвенника S = 0 - cтруктура нормальна, а степень иррациональности структуры s = -3, что означает три контурные избыточные связи. Попытаемся устранить их, заменив вращательные пары шатуна сферическими третьего класса: S = 3n - 2pн - p0 = 3∙3 - 2∙4 - 1 = 0, s = 3n - 3p5 = 3∙3 - 3∙2 - 2 = 1, что означает лишнюю степень свободы - вращение шатуна вокруг своей оси. Эта местная (локальная) подвижность не влияет на кинематику передаточного механизма. Что же касается степени аномальности структуры, то она не изменилась, поскольку и пары пятого класса, и третьего класса относятся к двухсторонним. Предположим, что тот же шарнирный четырехзвенник имеет два входных звена, причем не обязательно, чтобы это был двухкривошипный параллелограмм - входными могут быть любые два звена произвольного шарнирного четырехзвенника. В этом случае степень аномальности структуры: S = 3∙3 – 2∙4 – 2 = - 1. Механизм имеет одну индифферентную связь. Степень его иррациональности: 10 S = 3∙3 – 3∙4 = -3. Таким образом, изменение продольной структурной характеристики S не влечет за собой обязательного изменения поперечно-угловой характеристики s, что доказывает их независимость. Поконтурное определение структурных характеристик сложных механизмов производится с целью уточнению распределения структурных связей и возможных движений (подвижностей) в случае, если структура содержит одновременно и избыточные связи, и лишние подвижности одного типа. Например, один контур содержит лишнюю подвижность, второй избыточные связи (рисунок 2.7). 3 C F 5 B 1 A 2 D 4 G E S1 = 3∙4 - 2∙5 - 1 = 1 s1 = 3∙4 - 3∙3 - 2 = 1 S2 = 3∙1 - 2∙2 = -1 s2 = 3∙1 - 3∙2= -3 Рисунок 2.7 - Распределение структурных связей и возможных движений по контурам Общая степень иррациональности механизма: S = 3n – 3p5 –p3 = 3∙5 – 3∙5 – 2 = -2. Степень иррациональности первого контура: s1 = 3∙4 - 3∙3 - 2 = 1, что означает местную подвижность шатуна. Степень иррациональности второго контура: s2 = 3∙1 - 3∙2 = -3, то есть три избыточные связи. Очевидно, что общая степень иррациональности двухконтурного механизма равна сумме степеней иррациональности каждого контура. Степень аномальности механизма: S = 3n - 2pн - p0 = 3∙5 - 2∙7 - 1 = 0, то есть в целом структура нормальна. Степень аномальности первого контура: S1 = 3∙4 - 2∙5 - 1 = 1 - контур адаптивен. Степень аномальности второго контура: S2 = 3∙1- 2∙2 = -1 - контур индифферентен. При поконтурном подсчете структурных характеристик в каждом контуре были учтены только те структурные параметры, которые не были учтены в предыдущем контуре. Например, при определении S2 и s2 были посчитаны 11 только одно звено 5 и две вращательные пары F и G, а звенья 3 и 4 с шарнирами C, D и E были посчитаны в первом контуре. Приведенные примеры показывают, что избыточные связи, в том числе продольные (индифферентные), обнаруживаются при более глубоком анализе практически в любом механизме, подвижность которого обеспечена выполнением конкретных кинематических (геометрических) условий, связанных с размерами звеньев и их взаимным расположением, а также взаимным расположением осей кинематических пар. Структурные характеристики, таким образом, могут являться качественными и количественными индикаторами таких условий. Приведем следующий пример. Механизм соломонабивателя (рисунок 2.7) содержит четыре подвижных звена, поэтому, строго говоря, его нужно называть пятизвеннником, но во фронтальной проекции его схема выглядит как шарнирный четырехзвенник за счет параллельных звеньев, образующих повторяющиеся связи. Таким образом, первый уровень структурного анализа аналогичен предыдущему примеру. Второй уровень структурного анализа - исследуем пространственную схему: S = 3n - 2(p5 +p3) - p0 = 3∙4 - 2(4 + 4) - 1 = -5, s = 3n - 3p5 - p3 = 3∙4 - 3∙4 - 4 = -4. E D С4 С2 С1 C F G В С3 H A Рисунок 2.7 - Схема механизма соломонабивателя Расчет структурных характеристик показывает, что для обеспечения работоспособности механизма необходимо выполнить девять кинематических условий, при этом пять условий относится к линейным размерам звеньев, а четыре - к взаимному расположению осей кинематических пар. Отрицательные значения структурных характеристик означают, что при произвольных размерах и взаимном расположении осей кинематических пар данный механизм неработоспособен, поскольку не обладает подвижностью. Структурный анализ показал недостаточную эффективность применения сферических пар в данном 12 случае, так как они устраняют не все избыточные связи. Для сельскохозяйственного механизма с довольно значительными линейными размерами звеньев и недостаточно жесткой стойкой девять избыточных связей налагают достаточно жесткие точностные условия, выполнить которые без применения упругих звеньев и элементов практически невозможно. На третьем уровне исследуется каждый контур в отдельности. Определяем количество независимых контуров по формуле Х.И. Гохмана: c = p∑ - n = 8 - 4 = 4, (2.3) где p∑ - суммарное количество кинематических пар всех классов. Первый контур С1 представляет собой шарнирный четырехзвенник, содержащий три подвижных звена, две вращательные и две сферические кинематические пары, а также входную связь: S1 = 3n - 2p5 - p0 = 3∙3 - 2∙4 - 1 = 0, s1 = 3n - 3p5 - p3= 3∙3 - 3∙2 - 2= 1. Во втором контуре С2, образованном кривошипом, считается только одна вращательная пара: S2 = 3n - 2p5 - p0 = 3∙0 - 2∙1 - 0 = -2, s2 = 3n - 3p5 = 3∙0 - 3∙1 = -3. В третьем контуре С3, образованном шатуном с кривошипом, также нет неучтенных прежде звеньев, так как и кривошип и шатун были посчитаны в первом контуре и осталась только одна вращательная пара: S3 = 3n - 2p3 - p0 = 3∙0 - 2∙1 - 0 = -2, s3 = 3n - p3 = 3∙0 – 3∙1 = -3. В четвертом контуре С4 независимыми параметрами остаются коромысло и две сферические пары: S4 =3n - 2p3 - p0 = 3∙1 - 2∙2 - 0 = -1, s4 = 3n - p3 = 3∙1 - 2 = 1. Суммарная степень аномальности совпадает с полученной на втором уровне, а степень иррациональности выявила новые избыточные связи, несмотря на то, что суммарная степень иррациональности равна: s = s1 + s2 + s3 + s4 = (-3) + (-3) + 1 + 1 = -4 По три избыточные связи содержат контуры С2 и С3, но две местные подвижности (местные подвижности коромысел в контурах С1 и С4) “скрывают” две из шести избыточных связей, не устраняя их, так как избыточные связи и лишние подвижности находятся в разных контурах. Необходимо, таким образом, добавить два кинематических условия, обеспечивающих работоспособность механизма либо повышением кинематической точности, либо использованием упругих свойств звеньев. Таким образом, степень аномальности структуры показывает количество кинематических условий, или допусков на линейные размеры звеньев, а степень иррациональности показывает количество допусков на взаимное расположение осей кинематических пар. 13 2.3 С т р у к т у р а п о д в и ж н ы х с о е д и н е н и й Проанализируем структуру кинематических пар с точки зрения линейной теории структуры, то есть определим их структурные характеристики относительно линии замкнутого контура, содержащего только одну кинематическую пару. В такой модели отсутствуют подвижные звенья. Вращательная пара (рисунок 2.8) имеет следующие структурные характеристики: S = 3n - 2p5 = 3∙0 - 2∙1 = -2, s = 3n - 3p5 = 3∙0 - 3∙1 = -3. Очевидно, что суммарное количество связей равно классу пары (при этом не учитываются избыточные связи внутри пары, образованные элементами кинематического соединения). Степень аномальности, равная минус двум, указывает на две связи вдоль линии контура структурно-кинематической цепи, действующие на растяжение-сжатие. Степень иррациональности указывает на остальные структурные связи в замкнутом контуре, действующие на кручение, изгиб и сдвиг и вызывающие в контуре соответствующие деформации. S1 sT sQ sM s S2 Рисунок 2.8 - Структурные связи, образуемые вращательной парой M M Цилиндрическая пара четвертого класса имеет следующие структурные характеристики: S = 3n - 2p4 = 3∙0 - 2∙1 = - 2, s = 3n - 2p4 = 3∙0 - 2∙1 = - 2. Сумма степени аномальности и степени иррациональности дает класс цилиндрической пары, а количество связей уменьшилось на одну, вызывающую сдвиговую деформацию. sT sM s S1 S2 Рисунок 2.9 - Структурные связи, образуемые цилиндрической парой M M 14 Поступательная пара, обычно относимая к пятому классу, является кинематическим соединением, состоящим из цилиндрической пары с присущими ей связями и хотя бы одной плоскостной пары. Параллельность оси цилиндрической пары плоскостным элементам есть дополнительное кинематическое условие существования данного подвижного соединения, накладывающее на взаимное движение звеньев дублирующую связь на изгиб. При этом поперечной связи на сдвиг поступательная пара не накладывает, так же как и цилиндрическая. S = 3n - 2p5 = 3∙0 - 2∙1 = -2, s = 3n - 3p5 = 3∙0 - 3∙1 = -3. sT S1 S2 sM s Рисунок 2.10 - Структурные связи, образуемые поступательной парой M M Структурные характеристики сферической пары третьего класса: S = 3n - 2p3 = 3∙0 - 2∙1 = - 2, s = 3n - p3 = 3∙0 - 1 = - 1. S1 sQ S2 Рисунок 2.11 - Структурные связи сферической пары Структурные характеристики линейчатой пары второго класса: S = 3n - p2 = 3∙0- 1 = -1, s = 3n - p2 = 3∙0 - 1 = -1. S2 sM s Рисунок 2.12 -MСтруктурные связи линейчатой пары M 15 Структурные характеристики точечной пары первого класса: S = 3n - p1 = 3∙0 - 1 = - 1, s = 3n = 3∙0 = 0. S2 Рисунок 2.13 - Структурные связи точечной пары Результаты структурного анализа подвижных соединений необходимо использовать при устранении избыточных связей в замкнутых контурах структурно-кинематических цепей. Например, для устранения всех избыточных связей в структурно-кинематической цепи, образованной только вращательными парами пятого класса (типа шарнирного четырехзвенника) необходима замена двух из них цилиндрическим и сферическим шарнирами, при этом устраняются все три вида поперечно-угловых избыточных связей. Такую структуру можно считать рациональной, в отличие от случая замены двух вращательных шарниров сферическими, так как при этом образуется одна лишняя подвижность - вращение звена вокруг своей оси, что подтверждает и структурная характеристика s = 1. Из проведенного анализа следует важный вывод: если поперечно-угловых избыточных связей в одном контуре не может быть больше трех, то лишних подвижностей может быть сколько угодно в зависимости от числа звеньев и класса кинематических пар. Предложенная выше методика линейного структурного анализа позволяет исследовать и отдельные кинематические пары, относящиеся к сложным или составным, причем не только по закрытой схеме, как предыдущие примеры кинематических пар, но и по открытой схеме. Например, вращательная пара чаще всего образовывается одной парой сопряженных цилиндрических поверхностей, то есть цилиндрической парой четвертого класса и двумя парами боковых плоскостей, или плоскостными парами, относимыми к третьему классу, не существующими самостоятельно; во всяком случае, неизвестны механизмы, в которые входят плоскостные пары не в составе кинематических соединений. Плоскостная пара в отличие от сферической третьего класса обладает односторонним действием, поэтому в формулу для определения степени аномальности она должна войти с коэффициентом “1”, как односторонние пары. Действительно, плоскостную пару можно считать частным случаем пары второго класса с нулевой кривизной элементов. В таком виде в реальном механизме она может существовать лишь мгновение. В формулу же для определения степени иррациональности плоскостная пара войдет также с коэффициентом “1”, с которым в эту формулу входят и пары второго класса, и третьего. Кроме того, линейная модель структуры вращательной пары содержит не одну, а две цилиндрические пары 16 (рисунок 2.14,а). Исследуем структуру такого соединения по формулам (2.1) и (2.2), считая, что входных связей нет: S3 = 3n - 2p4 - p3 = 3∙1 - 2∙2 - 2 = -3, s3 = 3n - 2p4 - p3 = 3∙1 - 2∙2 - 2 = -3. а) а) б) Рисунок 2.14 - Структура вращательного соединения Проведенный анализ показывает, что вращательная пара может существовать как подвижное соединение двух звеньев (оси и стойки) только при выполнении шести кинематических (геометрических) условий, три из которых относится к линейным размерам, и три - к угловым. Это означает, что вдоль линии цепи наложено три связи: две связи наложены односторонними плоскостными парами, а одна самим звеном, которое при произвольном расположении осей концевых цилиндрических пар будет неподвижно. Представить такое количество избыточных связей можно, если использовать структурное правило не учитывать геометрические размеры и изобразить ту же структуру при произвольном расположении в пространстве осей цилиндрических пар (рисунок 2.14, б). Полученная структура станет вращательной парой при выполнении следующих кинематических условий: ограничительные плоскости должны быть параллельны торцам; расстояние между ограничительными плоскостями должно быть равно расстоянию между торцами цилиндрических элементов; угол между осями цилиндрических пар должен быть равен нулю; расстояние между осями цилиндрических пар должно быть равно нулю. В другом варианте одна из боковых плоскостей может быть заменена, например, штифтом, который образует с совокупной плоскостью высшую пару, при этом соединение остается одноподвижным. При этом структура соединения не изменяется: S = 3n - 2p4 - p3 - p2 = 3∙1 - 2∙2 - 1 - 1 = -3, s = 3n - 2p4 - p3 - p2 = 3∙1 - 2∙2 - 1 - 1 = -3. Возможен вариант вращательной пары без избыточных связей, если она образована одной цилиндрической парой и одной плоскостной: S = 3n - 2p4 - p3 = 3∙1 - 2∙1 - 1 = 0, s = 3n - 2p4 - p3 = 3∙1 - 2∙1 - 1 = 0, но в этом случае необходимо обеспечить замыкание односторонней плоскостной пары, как и в других случаях применения односторонней кинематической пары, например, с помощью пружины или с использованием силы тяжести, если позволяет конструкция. 17 Рисунок 2.15. - Структура двухопорного вала Односторонние кинематические пары могут стать двухсторонними, и наоборот, если использовать особую форму их элементов. Известно, что избыточные локальные связи появляются в кинематической паре, если в ней используются дополнительные элементы. Определим их число для двухопорного вала (рисунок 2.15): S = 3n - 2p5 = 3∙1 - 2∙2 = -1, s = 3n - 3p5 = 3∙1 - 3∙2 = - 3. Общее количество избыточных связей при произвольном расположении осей кинематических пар равно четырем, причем одна из них действует вдоль линии контура, а три относятся к поперечно-угловым. Рассмотрим такой вал в широко распространенном виде, когда на него действует поперечная сила F (рисунок 2.16, а). Если заменить одну из вращательных пар цилиндрической (рисунок 2.16, б), одной избыточной связью становится меньше: S = 3n - 2p5 - p2= 3∙1 - 2∙2 = -1, s = 3n - 3p5 - p2= 3∙1 - 3∙1 - 2∙1 = - 2. Продолжим замену кинематических пар, на этот раз цилиндрическая пара заменяется на пару “сфера-цилиндр”, которая относится к линейным парам второго класса, но двустороннего действия (рисунок 2.16, в). Определим структурные характеристики: S = 3n - 2(p5 + p2)= 3∙1 - 2∙2 = -1, s = 3n - 3p5 - p2= 3∙1 - 3∙1 - 1 = - 1. Если теперь вращательную пару заменить на сферическую (рисунок 2.16, г), то есть понизить класс пары на два, количество избыточных связей также уменьшится на две, в результате чего появляется лишняя контурная подвижность: S = 3n - 2(p3 +p2) = 3∙1 - 2∙2 = -1 s = 3n - p3 - p2= 3∙1 - 1 - 1 = 1 18 F а) F б) F в) F г) Рисунок 2.16 - Устранение локальных избыточных связей двухопорного вала Что же означает полученный результат? Означает ли он, что механизм имеет нормальную структуру? Рисунок 2.16, г показывает, что нет, если оси кинематических пар расположены произвольно, как и требуется при исследовании структуры. Точнее, сферическая пара не имеет оси, или имеет бесконечное множество осей, но если ось цилиндра в паре “сфера-цилиндр” не проходит через центр сферической пары, вдоль линии звена можно создать натяг, что подтверждает наличие индифферентной связи. Более того, данную структуру нельзя считать и рациональной, поскольку имеется лишняя контурная подвижность, которая как раз делает возможным случай, когда ось цилиндра на проходит через центр сферической пары. Если учесть, что вращательная подвижность двухопорного вала обеспечивается соосностью концевых пар, а избыточная связь вдоль линии звена устраняется той же соосностью, то есть кинематическими условиями, схема на рисунке 2.16, г обладает не одной лишней подвижностью. Практически вал становится адаптивным, он может вращаться при любом относительном положении концевых пар, в том числе несоосном и непараллельном, он может самоустанавливаться при любых нагрузках, но он не является рациональным ни чисто в структурном плане, так как самоустанавливается за счет соосности кинематических пар, а не за счет исключительно структурных условий. 19 Разумеется, ситуацию, когда ось пары «сфера-цилиндр» расположена перпендикулярно к оси вала, можно представить только гипотетически, поэтому именно данная схема является оптимальным решением в случае тяжелонагруженного или недостаточно жесткого вала. Конструктивно данная схема означает, что вал должен быть установлен в двух сферических подшипниках, причем один из них должен иметь некоторую свободу перемещения в осевом направлении, то есть в отверстии подшипника. 2.4 С т р у к т у р а м е х а н и з м о в с г и б к и м и с в я з я м и К механизмам с гибкими связями относятся различного рода ременные передачи – плоскоременные, круглоременные, клиноременные, а иногда рычажные механизмы содержат гибкую связь в виде ленты или троса. Поскольку гибкая связь односторонняя, по структурным свойствам она сравнима с односторонними кинематическими парами: либо как пара первого класса, если ее можно представить в виде нити (троса), либо как пара второго класса, если она образуется лентой (плоскоременная передача) - в этом случае к связи на растяжение добавляется связь на изгиб. Например, два рычажных звена соединены тросом (рисунок 2.17). Рисунок 2.17 - Механизм нормальной структуры с гибкой связью Структурно-кинематическая цепь содержит два подвижных рычажных звена, две вращательные пары и одну пару первого класса, образованную гибкой связью, а также входную связь. S = 3n - 2(p5 + p4 + p3) - p2 - p1 - p0 = 3∙2 - 2∙2 - 1 - 1 = 0, что означает нормальную структуру. В обычной двухшкивной ременной передаче каждая ветвь ремня образует отдельную гибкую связь, поэтому учитывается отдельно (рисунок 2.18): S = 3n - 2(p5 + p4 + p3) - p2 - p1 - p0 = 3∙2 - 2∙2 - 2 - 1 = -1, что означает механизм индифферентной структуры, в котором избыточная связь (индифферентная) позволяет создавать предварительное натяжение вдоль линии контура (вдоль ремня), которое не зависит от положения входного звена и не изменяется в процессе работы, как и в замкнутом стенде с циркуляцией энергии (см. рисунок 1.2, е). 20 а) б) Рисунок 2.18 - Структура ременной передачи: а) двухшкивная ременная передача; б) эквивалентная рычажная структурная схема Определим степень аномальности механизма на рисунок 2.19: S = 3n - 2p5 - p1 - p0 = 3∙5 - 2∙6 - 3 - 1 = -1, где в число n вошли: кривошип, два шкива, коромысло и пружина. Результат означает одну индифферентную связь от пружины, которую мы посчитали жестким звеном и которая создает натяжение в цепи. Если отбросить пружину и два ее шарнира, то S = 3∙4 - 2∙4 - 3 - 1 = 0, что означает нормальную структуру. Здесь каждая ветвь гибкой связи посчитана отдельно: p1 = 3. Рисунок 2.19 - Структура механизма с гибкой связью Вторая структурная характеристика - степень иррациональности структуры s - определяет баланс структурных связей и подвижностей вокруг и поперек линии структурно-кинематической цепи (2.2): s = 3n - 3p5 - 2p4 - p3 - p2. Пары первого класса не входят в данную формулу, так как не образуют избыточных связей в указанном направлении, поэтому гибкие связи, образованные нитью или тросом, также не образуют избыточных связей. Если гибкая связь образована лентой (плоскоременная), то учитывается как пара второго класса и образует одну избыточную связь на изгиб в каждом контуре. 21 Если гибкая связь осуществляется втулочно-роликовой либо зубчатой цепью, состоящей из шарнирно соединенных звеньев, степень аномальности механизма можно определять как для гибкой связи тросом или нитью, при этом не забывать, что в каждом замкнутом контуре, образованном только парами пятого класса, имеется по три избыточные связи - на кручение, изгиб и на сдвиг. 2.5 К л а с с к о н т у р а и м е х а н и з м а Класс механизма определяет метод его кинематического исследования, поэтому понятие о классе является связующим между структурой и кинематикой. Классом контура условимся считать неотрицательное значение степени аномальности контура структурно-кинематической цепи. Контуры с отрицательной степенью аномальности отнесем к нулевому классу. Различие между структурными группами звеньев нормальной структуры состоит именно в контурной степени аномальности, или в классе контура (контуров). Начнем с групп нормальной структуры. Двухзвенные группы (диады) содержат один контур и имеют степень аномальности, равную нулю: S =3n -2p = 3∙2 - 2∙3 = 0. В кинематическом плане задача о положениях для двухзвенных групп решается методом засечек, то есть достаточно знать размеры звеньев, чтобы определить их положение. Для трехповодковой группы (см. рисунок 2.7), имеющей в целом нормальную структуру, степень аномальности каждого из двух независимых контуров противоположна по знаку. Первый контур, степень аномальности которого равна единице, невозможно построить без дополнительного линейного или углового параметра. Если же принять произвольное значение этого параметра, при построении второго контура, степень аномальности которого равна минус единице, оказывается избыточным один из размеров. Таким образом, задача о положениях для данной группы решается только комплексно - совместно для двух контуров. Аналитически такое решение состоит в решении системы уравнений замкнутости двух векторных контуров, или четырех тригонометрических уравнений, графическое же решение основано на способе ложных положений. Таким образом, двухзвенные группы (диады) и содержащие их механизмы необходимо отнести к нулевому классу (нулевые механизмы), а трехповодковые - к первому классу. 22 Результаты поконтурного исследования групп нормальной структуры и полученных на их основе групп аномальной структуры сведены в таблице 2.2. Как следует из этой таблицы, класс механизма не зависит от общей степени аномальности группы или механизма в целом, потому что при его определении необходимо учитывать классы контуров, а общая степень аномальности есть алгебраическая сумма степеней аномальности контуров. Приведенных в таблице 2.2 примеров достаточно, чтобы сформулировать правила, по которым определяется класс механизма и структурной группы и что он означает, а также привести определение класса структурной группы. Итак, класс структурной группы и всего механизма определяется суммой положительных степеней аномальности ее контуров, то есть суммой классов входящих в состав контуров, при этом в качестве первого принимается контур, содержащий входное (начальное) звено. Поскольку класс механизма определяет метод кинематического исследования и в первую очередь способ решения задачи о положениях, номер класса показывает количество недостающих кинематических параметров, необходимых для кинематической определенности группы, или количество звеньев, которые нужно остановить, чтобы решить задачу о положениях. Класс, таким образом, не является чисто структурным признаком, но связывает структуру с кинематикой. Т а б л и ц а 2.2 - Определение класса структурной группы № п/п Степень аномальности Степень аномальности контура Класс группы 1 S=0 S=0 0 2 S=0 S=0 0 3 S=1 S=1 1 S=0 S1 = 1 S2 =-1 1 S=1 S1 =2 S2 = -1 2 S=0 S1 =1 S2 = -1 1 4 5 6 Схема группы S1 S1 S2 S2 S2 S1 S1 = 0 23 7 S1 S2 S2 8 S = -1 S2 = -1 0 S=0 S1 = 1 S2 = -1 1 S=1 S1 = 1 S2 = 0 1 S1 S2 9 S1 10 S3 S1 S=1 S1 = 1 S2 = 1 S3 = -1 2 S=0 S1 = 1 S2 = 0 S3 = -1 1 S1 = 1 S2 = 1 S3 = -1 S4 =0 S5 = -1 2 S2 11 S3 S2 S1 S5 12 S4 S1 S2 S=0 S3