Моделирования процессов наведения по подстилающей поверхности
реклама

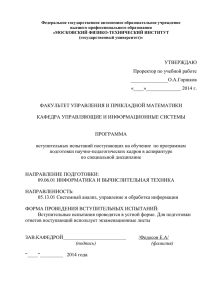
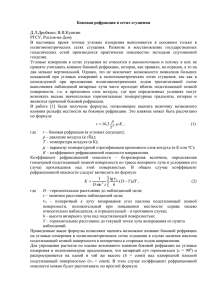
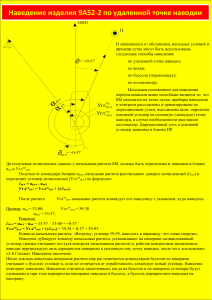
ТЕХНОЛОГИИ ИНФОРМАЦИОННОГО ОБЩЕСТВА Моделирования процессов наведения по подстилающей поверхности Гаврилова И.Л., Дудник Д.И., Сюрин В.Н., ГГУ, г. Гродно, Республика Беларусь Наведение беспилотных аппаратов является актуальной про блемой в военной области и в народном хозяйстве, например, для проведения спасательных работ. При этом наведение по подстила ющей поверхности (карте) является самым надежным и точным, ког да другие системы не работают (туман, сильные осадки, пыльные бу ри и т.д.). В этом случае радиоволновые методы на основе многолучевой интерференции, разработанные авторами, могут существенно об легчить задачу точного наведения беспилотного снаряда, при этом они не требуют ряда сложнейших математических преобразова ний, как в разработанных теоретически корреляционноэкстре мальных системах [1], и производят съем подстилающей поверхно сти, когда видео или ИКсистема неработоспособны. Явление многолучевой интерференции можно использовать в локации для идентификации целей и наведения по подстилающей поверхности, хотя традиционно в радиосистемах это явление в ос новном оказывает мешающее, или даже вредное влияние [2]. В рамках обобщенной математической модели [3] локацион ных измерений одномерная интегральная свертка, описывающая процесс измерений, имеет вид xa S *( x) = ∫ S( x) h( x − x ) dx, где Ai — амплитуда сигнала в iтом луче; ϕi — сдвиг фазы в том лу че, обусловленный разностью хода данного луча. В процессе измерения зондирующий сигнал посредством пово рота антенны перемещается вдоль рельефа поверхности объекта, при этом интенсивность сигнала в точке приема изменяется за счет вариации амплитуды и фазовых соотношений в каждом луче отра женного сигнала. Для подтверждения основных положений процес са локации в данном случае это является корректным. В качестве объекта исследования был выбран объект сложной формы, имеющий идеально проводящую поверхность различной высоты и формы. В результате измерений были получены для каждо го объекта свои уникальные портреты в виде зависимости интенсив ности поля от угла поворота антенны, например, на частоте 7,8 ГГц (рис.2). Таким образом, каждый объект или фрагмент подстилающей по верхности при облучении непрерывным сигналом будет давать свой индивидуальный отклик, по которому и можно производить иденти фикацию объектов или наведение по подстилающей поверхности. При моделировании системы наведения по подстилающей по верхности, построенная компьютерная модель демонстрирует ра боту такой системы наведения в трехмерном пространстве и позво ляет формировать произвольную подстилающую поверхность. В мо дели учитываются такие важные физические явления и свойства как многолучевая интерференция, коэффициенты отражения элементов (1) a 0 Здесь xa — максимальное значение анализируемого параметра. В простейшем примере для исследования параметров многолу чевой интерференции с имитацией подстилающей поверхности на уровне лабораторного эксперимента можно использовать простую схему, представленную на рис. 1. Тогда, в соответствие с (1), отра женный сигнал в точке приема S (t ) = n ∑ A cos(ωt + ϕ ), i i (2) i =1 Рис.1. Схема исследования многолучевой интерференции 92 Рис. 2. Результирующий сигнал в точке приема (f=7,8 ГГц) Спецвыпуск TComm, август 2009 ТЕХНОЛОГИИ ИНФОРМАЦИОННОГО ОБЩЕСТВА поверхности, их эффективные площади отражения, а также неров ность поверхности. Помимо явления многолучевой интерференции в разработке математической модели было учтено влияние другого важного явления — эффекта Доплера. Компьютерная модель представляет собой приложение с гра фическим интерфейсом, моделирующее наведение некоторого объекта (снаряда) по подстилающей поверхности в трехмерном пространстве. Компьютерное приложение позволяет наглядно про следить процесс наведения (измеряя в процессе полета координаты по высоте и горизонтальному смещению, а также представляя гра фик сканирования местности в сравнении с оптимальным маршру том) снаряда на цель. Цель представляет собой некоторую точку пространства, координаты которой заданы заранее. Так как речь идет о наведении по подстилающей поверхности, то до начала по лета снаряду известен набор т.н. портретов местности, которые яв ляются результатами сканирования поверхности по заданным мар шрутам, координаты которых также известны. Таким образом, перед началом полета снаряду известен набор портретов местности, координаты цели, начальные координаты по лета. В процессе полета снаряд проводит самостоятельное сканиро вание поверхности, сравнивая результаты с известным ему набором портретов и корректируя свой курс. Приложение обеспечивает на глядность процесса сканирования поверхности, выбора маршрута и процесса изменения курса. В результате работы приложения снаряд должен попасть в цель с максимальной точностью. Также в результате работы приложения должен формироваться портрет самостоятельного сканирования снаряда (рис.3). Приложение состоит из трех основных частей: • Трехмерная система Java 3D API — служит для отображения трехмерной модели местности и обеспечения наглядности процесса наведения на цель. • Вычислительная система JDK 1.5 — содержит в себе матема тическую и физическую модель процесса наведения, производит вы числение портретов местности, моделирование процессов отраже ния зондирующего излучения, расчет данных, необходимых для по следующей визуализации процесса наведения и его результатов. • Интерфейс приложения — обеспечивает наглядность резуль татов и процесса наведения с помощью графиков и системы рулево го управления, которая отображает изменения курса снаряда. Так же с помощью интерфейса осуществляется управление приложени ем и ввод первоначальных данных. Для построения интерфейса при ложения используется библиотека SWT (Standard Widget Toolkit) от Eclipse Foundation.Компьютерная модель учитывает различные важ ные физические явления, сопутствующие процессу в реальном ми ре, такие как многолучевая интерференция, эффект Доплера, диф фузное отражение, неровности отражающей поверхности и влия ние атмосферных неоднородностей. Предварительно, до начала разработки компьютерной модели, были проведены исследования в области существующих систем на ведения и выявлены их преимущества и недостатки. Также была по строена математическая модель из нескольких связанных парамет ров физических явлений и характеристик отражающих целей: коэф фициент отражения, неровность поверхности, удельная эффектив ная площадь отражения. Спецвыпуск TComm, август 2009 Рис. 3. График портретов местности Все подсистемы были реализованы с учетом последних тенден ций в подходах к разработке, а также с применением передовых технологий. В результате проведения экспериментов с использованием раз работанной модели было установлено, что подобная система наве дения, безусловно, является эффективной и представляет интерес для ее дальнейшего развития и применения, а так же лишена неко торых недостатков видеосистем наведения (отсутствие оптической видимости, плохие погодные условия). Однако данная система об ладает своими собственными недостатками. Например, ввиду воз можного совпадения (или небольшого отличия) электромагнитных параметров объектов поверхности возможно ошибочное принятие решения и, как результат, смещение снаряда в неверном направле нии, которое, впрочем, будет скорректировано по результатам по следующих измерений, но всетаки вызовет дополнительное беспо лезное барражирование. Также к существенным недостаткам такой системы наведения можно отнести наличие зондирующего излуче ния, которое может быть обнаружено на поверхности, хотя на ма лых высотах размеры активного пятна будут незначительными. Сре ди достоинств нужно отметить простоту реализации по сравнению с видеосистемами, где, помимо приемопередающего устройства, требуются еще сложные оптические приборы. Литература 1. Баклицкий В.К., Бочкарев А.М., Мусьяков М.П. Методы фильтрации сигналов в корреляционноэкстремальных системах навигации. Под ред. В.К.Баклицкого. — М.: Радио и связь, 1986. — 216 с. 2. Ключников А.С. Радиооптика и голография: Учеб. пособие для вузов. — Мн.: Университетское, 1989. — 224 с.: ил. 3. Разработка математической модели измерений и структуры радио локационного измерителя расстояний ММВ на фоне подстилающей по верхности//Отчет о НИР (промежуточ.): А0806 / УО "Гродненский госу дарственный университет им. Янки Купалы"; рук. Сюрин В.Н.; исполн.: Гаври лова И.Л. [и др.]. — ГрГУ, 2006. — 44 с. — № ГР20021331. 93