При проектировании зданий и некоторых городских сооружений
реклама

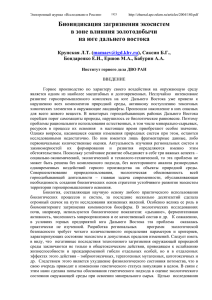
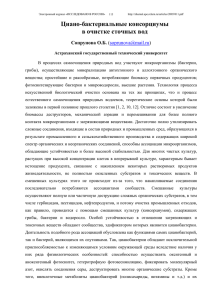
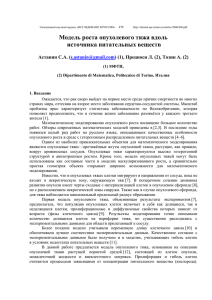
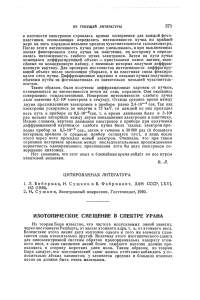
Электронный журнал «ИССЛЕДОВАНО В РОССИИ» 991 http://zhurnal.ape.relarn.ru/articles/2003/089.pdf Модель направленного движения толпы с элементами анализа ситуации. 1 Степанцов М.Е. ([email protected] ) Московский государственный социальный университет Вопрос о безопасности движения жителей крупных городов в условиях ограниченного пространства и большого количества движущихся людей (например, в подземных переходах) является, безусловно, одной из важных составляющих обеспечения нормальной жизнедеятельности в городах. Одной из проблем, возникающей при движении группы людей, является образование заторов или «пробок» при наличии некоторых препятствий на пути движения такой группы. Если по каким-то причинам такие препятствия должны обязательно находиться на пути людей, то кажется целесообразным заранее предсказать, насколько сильную помеху они создадут. Поскольку реальный эксперимент требует значительных затрат, а иногда в качестве экспериментальных данных могут выступать лишь результаты уже произошедших ЧП, подчас с трагическим исходом, продуктивной может оказаться идея проведения численных экспериментов, моделирующих подобные ситуации. Для этих целей может, в частности, быть применена дискретная модель, предложенная в [1], построенная на основе клеточного автомата, относящегося к классу решеточных газов [2]. Эта модель, в частности, позволяла описывать качественно такие явления как возникновение «пробки» при сужении области движения и «отрицательная вязкость» - возможность более быстрого движения у границ области движения. Однако в этой модели выбор способа движения людей в заданном направлении при наличии препятствий представляет собой случайный процесс. Образно данную модель можно назвать моделью «слепых котят». Однако в реальной ситуации человек, даже двигаясь в плотной толпе, оценивает обстановку и, в соответствии с этой оценкой, выбирает оптимальный, по его мнению, путь. 1 Работа частично поддержана грантом РФФИ, код проекта 02-01-00844. Электронный журнал «ИССЛЕДОВАНО В РОССИИ» http://zhurnal.ape.relarn.ru/articles/2003/089.pdf 992 Способ моделирования подобного процесса был рассмотрен в [3], а в данной работе предлагается окончательный вариант модели движения группы людей, в котором есть элементы анализа ситуации участниками движения. Построим модель в предположении, что каждый человек в группе стремится двигаться в определенном (одном для всех) направлении. При невозможности двигаться в этом направлении, наличии на пути непреодолимых препятствий или значительного количества других людей человек пытается изменить направление движения, выбирая то, на котором препятствия минимальны. Пусть поле клеточного автомата представляет собой равномерную ортогональную сетку, в узлах которой заданы величины, которые могут принимать значения 1 или 0 (в терминологии теории клеточных автоматов каждая клетка может находиться в одном из двух этих состояний), соответствующие наличию или отсутствию человека в данной точке. Каждой точке приписывается еще один атрибут наличия (1) или отсутствия (0) препятствия в данном месте. Значение этого атрибута 1 фактически запрещает данной клетке находиться в состоянии 1. На каждом шаге для каждой клетки поля клеточного автомата, находящейся в состоянии 1, рассчитаем вероятности смещения человека из данного положения в одну из четырех соседних клеток. Для этого положим эти вероятности равными нулю в случае, если соседняя клетка занята (запретим смещение в этом направлении). расстояние r Для оставшихся (являющееся направлений параметром осуществим модели) «просмотр» следующим на образом: суммируется число всех клеток, лежащих в данном направлении на расстоянии, не превышающем r , находящихся в состоянии 1, причем, если в этом направлении встречается клетка с препятствием, она и все клетки, лежащие за ней, рассматриваются, как занятые. Теперь вычислим вероятности смещения в направлениях, которые не были запрещены по формулам: pi = S , r где S - результат суммирования. Повысим вероятность смещения в одном (заданном) направлении, моделируя направленное движение толпы. Для этого увеличим вероятность смещения в одном из направлений, уменьшив соответственно, вероятности смещения в остальных направлениях, так, чтобы сумма их не изменилась, например, по формулам: Электронный журнал «ИССЛЕДОВАНО В РОССИИ» p1/ = p1 + http://zhurnal.ape.relarn.ru/articles/2003/089.pdf 993 a ( p 2 + p3 + p 4 ) 3 a p 2/ = p 2 (1 − ) 3 a p3/ = p3 (1 − ) 3 a p 4/ = p 4 (1 − ) , 3 где a ∈ [0;1] - некоторый коэффициент, задающий степень стремления двигаться в этом направлении от 0 (такого стремления нет) до 1 (такое движение осуществляется при любой возможности). Затем для каждой клетки, находящейся в состоянии 1 выберем случайным образом (в соответствии с вычисленными вероятностями) направление смещения и, одновременно на всем поле, произведем это смещение – переведем данные клетки в состояние 0, а состояние соседней клетки в выбранном направлении увеличим на единицу. Отметим, что эта операция не производится, если все вероятности для данной клетки оказались равными нулю (смещение заблокировано во всех направлениях). Наконец, решим проблему, связанную с тем, что в некоторых клетках значение состояния превышает 1, так как в них было произведено смещение из нескольких соседних клеток. Пусть состояние данной клетки равно n ( 2 ≤ n ≤ 4 ). Случайным образом с равными вероятностями выберем n − 1 соседнюю клетку, находящуюся в состоянии 0 (такие найдутся, ведь именно из них происходило смещение в данную клетку). Припишем всем выбранным клеткам, а также и центральной значение 1. Описанные выше правил, задают динамику модели, при которой каждая частица перемещается в выбранном направлении, стремясь обходить препятствия такому движению в направлении, наиболее свободном для движения. Надо отметить, что заданный таким образом закон изменения конфигурации поля сохраняет число клеток, находящихся в состоянии 1, что является естественным требованием к модели. Оказалось интересным проверить эффективность этой модели на некоторых тестовых, однако, возможно, имеющих практическую ценность, задачах. Первая заключалась в том, чтобы, исследовав различные профили сужения подземного перехода (рис.1), найти наибольшее значение угла ϕ (при Электронный журнал «ИССЛЕДОВАНО В РОССИИ» этом общая длина http://zhurnal.ape.relarn.ru/articles/2003/089.pdf 994 сужения будет наименьшей, что, видимо, выгодно конструктивно), при котором не будет наблюдаться ярко выраженного затора при потоке людей большой плотности. Моделирование этой ситуации при различных значениях параметров – угла ϕ и плотности потока людей показало, что при значениях угла, не превышающих ϕ кр = π 4 , затор возникает лишь при плотности потока, приближающейся к максимально возможной. Если же значение угла превышает ϕ кр = π 4 , то затор возникает при сравнительно небольших плотностях потока. Рис.1 Профиль сужения подземного перехода Рис.2. Профиль прохода, перегороженного двумя конструкциями. Вторая задача состояла в том, чтобы найти оптимальное (то есть, не приводящее к затору при возможно больших плотностях потока людей) расположение двух одинаковых конструкций, перекрывающих вместе 40% ширины прохода (рис. 2). Здесь в роли параметра выступало расстояние между конструкциями ∆ , а минимизировалось время прохождения группы из заданного числа человек. Из полученных результатов может быть сделан вывод, что оптимальным является расположение, при котором конструкции оставляют в проходе на три равных зазора. Данная модель, на взгляд автора, наделена достаточным количеством черт моделируемого объекта (неорганизованной группы людей), чтобы ее можно было рекомендовать в качестве одного из средств проверки безопасности перемещения групп людей в условиях пространственных ограничений. Особо следует отметить, что данная модель может быть отнесена к классу клеточных автоматов (хотя и с оговоркой по поводу учета нелокальных связей при «просмотре» направлений), поэтому наиболее эффективно с точки зрения Электронный журнал «ИССЛЕДОВАНО В РОССИИ» 995 http://zhurnal.ape.relarn.ru/articles/2003/089.pdf скорости вычислений она может быть реализована на компьютерах с высокой степенью параллельности вычислений. Литература: 1. Малинецкий Г.Г., Степанцов М.Е. Моделирование динамики движения толпы при помощи клеточных автоматов с окрестностью Марголуса // Известия Высших учебных заведений. Прикладная нелинейная динамика, 1997, том 5, №5, с. 75-79. 2. Малинецкий Г.Г., Степанцов М.Е. Клеточные автоматы для расчета некоторых газодинамических процессов // Журнал вычислительной математики и математической физики, 1996, том 36, №5, с. 137-145 3. Степанцов М.Е. Моделирование динамики движения группы людей на основе решеточного газа с нелокальными взаимодействиями. // Известия Высших учебных заведений. Прикладная нелинейная динамика, 1999, том 7, № 5, с.44-46.