Разработка и исследование математической модели
реклама

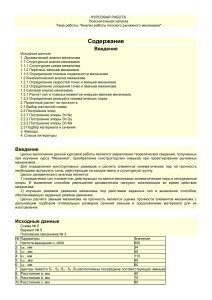
Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Разработка и исследование математической модели динамической системы оператор - рабочее пространство подвижного транспортного средства в экстренных ситуациях Шмаков В.С. ГОУ ВПО Владимирский государственный университет Постановка задачи: анализ взаимодействия водителя с внешней средой в экстремальных для объекта ситуациях. Под внешней средой подразумевается замкнутое пространство кабины водителя. Процесс взаимодействия описывается в декартовой системе координат. В докладе рассматривается построение кинематической модели водителя, как многозвенной системы. Контролируемые и анализируемые координаты: x, y, z, x’, y’, z’, x”, y”, z”. Со стороны объекта на водителя в экстремальных ситуациях (резкие угловые и линейные ускорения)действуют возмущения (усилия). Представим вектор возмущения в виде P = f ( q , q& , q&&), q ∈ ( x, y , z ) Рассмотрим плоскую модель. При этом водитель представлен в виде многозвенной системы с кинематической схемой представленной на рисунке. Звенья будем считать абсолютно жесткими. Относительное перемещение i-го звена относительно связанного с ним (i—1)-го звена представляет собой регулируемую переменную qi. Вектор q = [q1 , q2,…, qN ]T является вектором обобщенных координат системы. Пренебрегаем силами трения в кинематических парах и считаем связи идеальными, голономными и удерживающими. Тогда описание динамики многозвенного механизма может быть получено с помощью уравнений Лагранжа 2-го рода. Для системы тел, находящейся в потенциальном поле сил тяжести, уравнения Лагранжа 2-го рода записываются в векторной форме так: Здесь φ— вектор обобщенных скоростей (NX1), ; Т — кинетическая энергия причем механизма; П — потенциальная энергия механизма; М — вектор обобщенных неконсервативных сил (NX1) представляющий собой сумму вектора сил Мпр, передаваемых от исполнительных двигателей на звенья механизма через устройства передачи движения (механические передачи), и вектора внешних сил Мвн. Таким образом, Везде для вращательных движений М, Мдв, Мвн понимаются как векторы моментов сил. Кинетическая энергия механизма связана с вектором обобщенных скоростей с помощью симметрической матрицы инерционных характеристик A(q), компоненты которой зависят от обобщенных координат: Обозначим составляющую через вектор статических сил Мст. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 120 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Преобразуем его к виду: где: Вычислим потенциальную энергию системы: . Таким образом, получили модель манипуляционного дифференциальных уравнений Лагранжа 2-го рода: механизма в виде Вычисление кинетической энергии: Кинетическая энергия многозвенной системы определяется как сумма кинетических энергий звеньев: Вычислим кинетическую энергию системы, включающей плоский трехзвенник и груз на конце (голова). Кинетическая энергия первого звена: Кинетическая энергия второго звена: x2, y2—координаты центра масс с2 звена в абсолютной системе координат; угловая скорость звена . Кинетическая энергия третьего звена: , Кинетическая энергия четвертого звена (головы): Где m0—суммарная масса четвертого звена; x0, y0—координаты центра масс с0 этой системы тел. Находим кинетическую энергию механической системы: Декартовы координаты центров масс звеньев: Найдем и подставим частные производные от кинетической и потенциальной эергий в выражение уравнений Лагранжа 2-го рода… Тогда получим систему уравнений: Из полученной системы уравнений видно, что движения первого и второго звеньев динамически взаимосвязаны. Кроме того, инерционные характеристики (величины а11, …,а33) зависят от обобщенных координат, а следовательно, от конфигурации механизма. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 121 Секция 4 «МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ И ОПТИМИЗАЦИЯ АВТОТРАНСПОРНЫХ СРЕДСТВ». Полученные дифференциальные уравнения являются нелинейными. Их анализ, а тем более использование при синтезе исполнительных систем затруднительны, так как нет хорошо разработанной теории нелинейных систем. Поэтому дальнейшими шагами исследования являются линеаризация исходных уравнений и анализ линеаризованной модели манипуляционного механизма. Заключение: в настоящее время выполняется моделирование в среде MathLab и исследование Литература 1. Игнатьев М.Б., Кулаков Ф.М., Покровский А.М. Алгоритмы управления роботамиманипуляторами (2-е издание). Л., Машиностроение, 1977. 248 с. 2. Игнатьев М.Б. Голономные автоматические системы. Л., АН СССР, 1963. 204 с. 3. Игнатьев М.Б., Кулаков Ф.М., Покровский А.М. Алгоритмы управления роботамиманипуляторами (1-е издание). Л., Машиностроение, 1972. 247 с. Материалы международной научно-технической конференции ААИ «Автомобиле- и тракторостроение в России: приоритеты развития и подготовка кадров», посвященной 145-летию МГТУ «МАМИ». 122