автоматизация измерений электрических характеристик
реклама

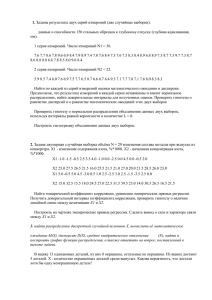
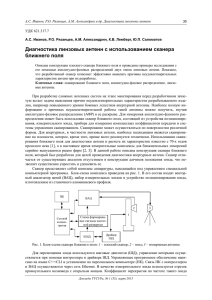
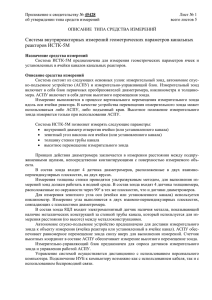
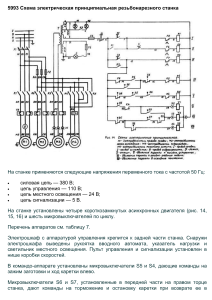
J o s. _ .;... o л_ г _ ов_ Ех__ Е_ и .....2 _ н о_ _ м _Е_н_ н_ I_Т ь _ ои Р_Е_ _ _ _ и_с_ я _ и _ лц_ _ ом _ти .д:_ _ _з_ б9 _т s_ 9 I_•_ 4__АВ з IN_о_ _ s s _t4_________ · __ центрального процессара SM2-CPU с uU"rPnttv>l� ным модулем SM2- ЕТН (для работы по ,JIZ..,.__� Ethemet); модули ввода дискретных SM-DINl и вывода дискретных сигналов SMDOUTl; источник питан ия SM2-DC24V. Св� АВТОМАТИЗАЦИЯ ИЗМЕРЕНИЙ ЭЛЕКТРИЧЕСКИХ ХАРАКТЕРИСТИК АНТЕННЫХ СИСТЕМ · О.П. ПонОJШlрёв, Н.Н. См11рнов Рассмотрено использование программируемЬIХ ло­ гических контромеров для автоматизации изме­ рений электрических характеристик антеннЬIХ систем в условиях безэховой камеры. На основе экспериментальнЬIХ даннЬIХ исследования распре­ деления электромагнитного поля во внутренней области отражателей с круговым ---"""': профилем даны рекомендации по минимизации погрешнос­ тей измерений. Измерениям электрических характерИстик ан­ тенных систем (АС) на открЫТЪIХ полигонах при­ сущ ряд недостатков. По этой причине наuти ши­ рокое применение изолированные от внешних влияний безэховые камеры (БЭК), представляю­ щие собой закрытые экраниро ванные- помещения, в которых спецИ:алъными способами обеспечи­ ваются условия свободногО 'пространства и безэхо­ вости [1, 2]. В этих камерах изм�ряют электричес­ кие характеристики АС в бЛИжней зоне приёма между ПЛК и ПК обеспечивается по двум ли­ ниям: последовательному асинхронному интер­ фейсу Для RS-232C и сети Ethemet. уnравления режимами работы ШД в среде ISaGRAF-3.x разработано проrраммное обеспе- чение (ПО)·- проект STEPDRV3. При задании очерёдности и длите льности управляю щих им­ пуЛьсных последовательностей интервал времени в 60 мс разбивается на дискретные подынтервалы импульсов, выдаваемые модулем SM-DOUTl в прямом режим е и при реверсе. ПО ПЛК состоит из трёх проrрамм, написанных на языке последо­ вательных функциональных схем SFC. ПО содер­ жит главную проrрамму таiп и две дочерние про­ rраммы: fwd- для обеспечения прямого хода IIIД и bwd - для реверса. Для удобства оценки поr­ решности позиционирования максимальный ход . каретки· в одном напрамении оrраничивался 896 шагщи поJЩошагового режима. Абсолютная поrрешность позиционирования 896 сиrналов. Один из распространеНных методов Jt:З:­ каретки на мерения сиrналов основан на сканировании по­ верхности объектов измерений активным или пас­ сивным зондом, расположенным в так называе­ мом .раскрыве исследуемой АС. Специализиро­ ванные автоматизированные комплексы для из­ мерения характеристик АС обеспечиваЮт необхо­ димую скорость обработки результатов измереНий, приемлемые точность и достоверность получае­ мых оценок [3, 4]. Однако стоимость таких комп­ лексов высока. В автоматизированных комплексах целесообразно использовать проrраммируемые логические контроллерЫ (МК) промышленн:рrо назначения, с помощью которых, в часuюсти, осуществля ют управленИе электро приводами с шаговыми двигателями (ШД). Преимуществами электроприводов с ШД явля ются "возможНоСть не­ ного шага. В автоматизированном измерительном комплеl(се бьmа обеспечена совместимость его составных элементов на аппаратном и проrрам­ посредственного цифрового упрамениЯ с помо­ щью переанального компъюrера (ПК) или специа­ лизированного ПЛК, высокое быстродействие и большой вращающий момент. За основу nредлагаемого автоматизирова$ого комплекса для измерения распределения 'Элект­ рического поля вдоль линейной координаты был взят ПЛК SМART-2 фирмы РЕР Modular Computers (Германия). Комплекс содержит элек­ тропривод с ШД 4SHG023A39S, многофункцио­ ' плату PCL8J.8Ls фирмы· .Advantech (Тайвань) и ПК с инСтрументальной . сре,zч:>й ISaGRAF-З.x фирмы CJ Intemational (Франция). нальную При позиционировании измерительного зонда в конфигурацию ПЛК SМART-2 входят модуль шагах не превышала размера од­ мном уровнях. Блок-схема алгоритма управления измерительной установкой показама на рисунке, а в таблице предстаWiено описание её блоков. Разработанный проrраммно-аппаратный комп­ лекс используется для измерения распределения напряжённости электрического поля вдоль оси по­ лусферического отражателя сферической зеркаль­ ной антенны сантиметрового диапазона. Выбор объекта измерений абуеломен тем, что сферичес­ кие антенны являютс я эффективным средством сканирОвания диаrрамм направленности (Дll) в заданном диаПазоне углов и mбкого управления амплитудно-фазовым распределеНием поля в рас­ крыве гибридных зеркальных антенн [5, 6]. Высокочастотная часть I(омnлекса состоит из полусферического отражателя радиусом 23 см, Л 14 -зонда (вибратора) в вИде продолжения цен­ трального проводника коаксиального кабеля РК50, ·п одвижной каретки матричного принтера �Epson• и детекторной секции. РаскрЪIВ полусфе­ ры обзiучался из дальней зоны на длине волны 3,2 см вертикально-поляризованным Полем и го­ ризонтальн_о-поляризованным полем для измере­ ния распределения радиальной компоненты Ег и тангенциальной компонентЬI Е1 соответствен­ но. Для выделения бегущей волны и минимиза­ ции переотражений от выступающих частей экс­ периментального комплекса нижняя часть рас- · J9-4931 «АВТОМАТИЗАЦИЯ И СОВРЕМЕННЫЕ ТЕХНОЛОГИИ•. 2008. N2 4 15 Описание блоков алгоритма управлени автома111зированной измерительной установкой �-;.�-� ·-..,.,..� . N �- ·��,,. . "' ''""�·?.Г"' '� � '!if"� ��,..-)� tооозначеиие'б.ЛоКа .� �ry ::�·� · '"�:!:�71"!� tЖ�..;;�-tА.:.о ;� ���� ,:З:; ��.�- ·s:'" ·�i 9ПВ�e-�бJiOd:f�.;t�� .. .. . " ��. ���. 1��д: К1 Выбор режима: «прогон•, «Точка» �- ..,." · �� - �.,.• _ .. . .- _- _ t Al Установка режима •прогон» К2 Установка параметров: число проrонов; число отсчетов (выборок) на шаге; диапазон начала Xmin и конца Xmax прогона А2 Установка «ручного• режима выбора шага кз Установка координаты х точки позиционирования каретки К4 К5 АЗ УстановJ9i длины. Шага Запуск подпрограммы управления дляной шага . Пропадание сигнала генератора на время .. t>txpкr Кб Архивпрованне данных в К7 Прогон каретки в диапазоне координат x min .. .xmax К8 SCADA Измерение амrщйтуды A;(i - системе Trace Mode 5 -номер шага) на проrоне. Измерение максимальной амплитуды A.n..v в диапазоне А4 К9 Поовеока vсловия А.>сА Опред�ление числа шагов n А5 · Проверка условия (с , - ко�станта) для выбора которых вщолняется условие А. � с.А"".х n � nxpкr KJO Вывод сообщения о неисправности генератора Kll Построение трендов К12 Проверка стабильности рабочей частоты генератора Аб х,.,;" .. .x,.,,.v Проверка частоты по условию крыва закрывалась радиопогдощающим покры­ тием. Программно-аппаратная часть комплекса lfo -8 fol $е (е - константа; б/0 -девиация частоты) АС в дальней зоне представляет собой комплекс­ ную задачу. Эта задача заключается в обеспече­ управляла линейным перемещением измеритель­ нии требуемого уровня безэховости БЭК, плос­ ного зонда в пределах заданного ИНТервала riере­ кого фронта падающей волны на раскрыв иссле­ мещени� и числа прогонов каретки. Шаг зонда составлял .0,4 мм при полношаговом и дуемой АС и учёта поrрешностей измерений от 0,2 мм при его сферичности . При этом необходим учёт из­ Распределение поля. -реmстрировалоеь напря­ взаимной юстировки элементов эксперименталь­ полушаговом режимах. мерения формы и структуры облучающей ДН, Жением ца выходе многофунiЩJiОJ:IЗ,ЛJ>Щ>Й платы ной установки, точности технологического вы­ как среднее арифметическОе трёх из­ полнения зеркал АС и др. Наибольшее значение мерений в. каждой точке фиксировсщного поло­ имеют поrрешноtти, обусловленные переотраже­ PCL818LS жения зонда., Результаты обработКи измеритель­ ниями от элементов установки и окружающих ной информации фиксировались на автоматизи­ объектов. рованном рабочем месте оператора, посТроенном зависит от конкретных задач по исследованию в среде VisiDAQ фирмы Advantech. Минимизация поrрешностей . автоматизиро­ ванных измерений электрических характеристИк Ранжирование других характеристик АС при заданных поrрешностей поляризации поля, длине волны и размерах объекта. Разработанный авrоматизированный измери- ISSN 0869-4931 �АВТОМАТИЗАЦИЯ И СОВРЕМЕННЫЕ ТЕХНОЛОГИИ•. 2008. � 4 16 нет нет нет нет да нет Блок-схема &Jm)рвтма уораалеВИJI измервтеJIЬRой уставовкой тельный комплекс отличается простотой реализа­ ции , возможносrью функционального расширен ия и исполъзованием Доступного сriщдартноrо ПО. Список литературы 1. Бахрах л.д., Куро� А.П. Голоrрцфия роволновой технике. М.: Сов. ра,tЩо, 1979. в мик­ 2. Страхов А.Ф. Автоматизированные антенные из­ мерения. М.: Радио и связь, 1985. 3. .Аидросов В.А., Епапо И.В., Кришrоnов А.В. Автоматизированный комплекс измерения характерис­ mк антенн по ближней зоне. Радиотехника� 2002. N.! 9. 4. АветиСJIВ В.Г.. Авrоматические IШанарные изме­ рения бли.жних полей антенн мнллиметровьtх волн. в 5. в диапазоне коротких PaдuomexnuJЦJ. 2007. ·Nl 2. ПоноМа:рёis О.П. Решение уравнений Максвелла сферической системе коордИнат· с использованием сферичесiСИJf зер­ PaiJuomexниJЦJ. 2006. N1 4. груnnы вращений. Приложение для кальных антенн. б.'_.Пономарев О.П., дифракционных своЙСтв ля шт антенных ве.,юв систем Paдui:Jinexнuк.a. 2007. N.! 2. И.А. МоДелирование подусферического отражате­ фазометрических РЛС.