Матричное описание лазерного резонатора
реклама

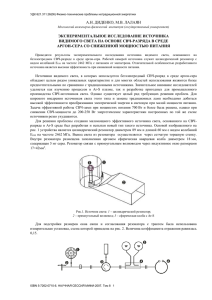
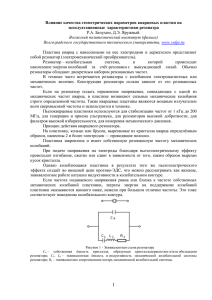
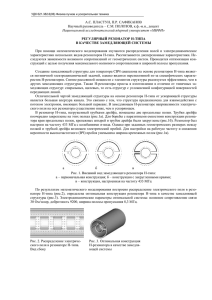
ЛАЗЕРНЫЙ РЕЗОНАТОР Задача об устойчивости лазерного резонатора — классическая задача современной оптики. Мы решим ее в параксиальном приближении, используя аппарат матричной оптики. L R2 R1 Рис. 1: Лазерный резонатор представляет собой пространство между двумя соосными зеркалами. Его конфигурация определяется тремя числами R1 , R2 и L. В простейшем случае лазерный резонатор это два соосных сферических зеркала и его конфигурация полностью определяется всего лишь тремя параметрами — радиусами зеркал R1 и R2 и расстоянием между ними L. В зависимости от сочетания этих трех чисел параксиальные лучи внутри лазерного резонатора могут вести себя двумя различными способами. Либо параксиальный луч после многократных отражений будет оставаться внутри резонатора, и такой резонатор называется устойчивым. Либо после нескольких отражений любой луч будет выбрасываться из резонатора, такой резонатор называется неустойчивым. Матрица перемещения и матрица отражения. В матричной оптике любая осесимметричная система описывается 2 × 2 матрицей A B M= , C D которая называется оптической матрицей системы. Пусть световой луч на входе в систему задается своей высотой y0 и углом наклона α0 к оси системы, то есть характеризуется двумерным вектором y0 . α0 Тогда после прохождения через систему его высота y1 и угол наклона α1 будут y1 y0 =M . α1 α0 Оптическая матрица системы является последовательным произведением элементарных оптических матриц — матриц перемещения, преломления, 1 отражения. В случае лазерного резонатора нам будет достаточно матриц перемещения и отражения. Для получения матрицы перемещения рассмотрим световой луч, входящий в систему на высоте y0 с углом наклона α0 и свободно распространяющийся вправо на расстояние L. a0 y0 L tg a0 y0 L Рис. 2: Высота светового луча на входе y0 , на выходе y0 +L tg α0 ≈ y0 +Lα0 , угол не меняется. Тогда на выходе из системы его высота будет y1 = y0 + L tg α0 . Учитывая условие параксиальности, в частности малость угла α0 , можно заменить тангенс этого угла на сам угол и получить y1 = y0 + Lα0 . Учитывая, что луч распространяется в свободном пространстве, имеем также α1 = α0 . Последние два соотношения можно записать в матричном виде y1 1 L y0 = . α1 0 1 α0 Итак, перемещение светового луча в свободном пространстве на расстояние L описывается матрицей 1 L T = , 0 1 которая и называется матрицей перемещения. Переходим к отражению. Пусть световой луч отражается от сферического зеркала радиуса R. При этом отражение происходит на высоте y0 и до отражения луч имеет угол наклона α0 . Очевидно, что непосредственно при отражении высота луча не изменится, то есть y1 = y0 , а вот угол наклона поменяется (рис. 3), и каким образом, это мы сейчас подсчитаем. Так как зеркало сферическое, нормаль к нему совпадает с радиусом. Угол между световым лучом и радиусом — угол падения, обозначим β, угол отражения тоже будет β. Поэтому угол наклона отраженного луча будет α0 + 2β, а с учетом того, что после отражения луч будет двигаться в 2 a0 b R a0+b b y0 Рис. 3: При отражении высота светового луча не меняется, угол падения и угол отражения равны β. противоположном направлении и мы должны будем изменить положительное направление оси x, на самом деле будет α1 = −α0 − 2β. Прямоугольный треугольник на рисунке 3 дает нам tg(α0 + β) = y0 /R или, учитывая малость углов, α0 + β = y/R. Откуда β = y0 /R − α0 . Подставляя это в полученное ранее выражение для α1 , имеем 2 y0 + α0 . R Записывая все это в матричном виде, получаем ! 1 0 y y1 0 2 = . α1 α0 − 1 R Итак, отражение светового луча от зеркала радиуса R описывается матрицей ! 1 0 2 R= , − 1 R которая называется матрицей отражения. Добавим, что для луча, движущегося в обратном направлении, матрицы премещения и отражения имеют тот же самый вид. α1 = − Матричное описание лазерного резонатора. Применим полученные результаты к лазерному резонатору. Будем считать, что световой луч стартует с левого зеркала на высоте y и под углом α. Сначала луч перемещается от левого к правому зеркалу и за это перемещение отвечает матрица перемещения 1 L T12 = . 0 1 Далее луч отражается от правого зеркала жения 1 R2 = 2 − R2 3 и за это отвечает матрица отра 0 . 1 После отражения происходит перемещение в обратном направлении, описываемое матрицей 1 L T21 = . 0 1 Наконец, световой луч отражается от левого зеркала, и это отражение задается матрицей 1 0 . R1 = 2 − 1 R1 А так выглядит полный проход светового луча через лазерный резонатор y y y y y → T12 → R2 T12 → T21 R2 T12 → R1 T21 R2 T12 . α α α α α Произведение матриц M = R1 T21 R2 T12 называется матрицей лазерного резонатора. После полного прохода через резонатор начальный световой луч с высотой y и углом наклона α переходит в световой луч y M . α А после n-кратного прохода — в y . M α n Так что в некотором смысле вопрос об устойчивости лазерного резонатора решен. Нужно проследить (например, на компьютере) за поведением степеней M n матрицы резонатора M и выяснить, растут ли элементы M n с ростом n или остаются ограниченными. В первом случае резонатор будет неустойчивым, во втором — резонатор устойчив. Сейчас мы сделаем это без компьютера. Поведение степеней M n . Под действием матрицы M вектор v переходит в вектор M v, при этом меняются и его длина и направление. Но для 2 × 2 матрицы имеются два выделенных вектора, направления которых не изменяются, M v1 = λ1 v1 , M v2 = λ2 v2 . Эти векторы называются собственными векторами матрицы M , а числа λ1 и λ2 называются ее собственными или характеристическими числами. Теперь для вычисления действия матрицы M на любой вектор v его можно сначала разложить по собственным векторам v1 и v2 v = a1 v1 + a2 v2 , 4 и только потом подействовать матрицей M M v = M (a1 v1 + a2 v2 ) = a1 λ1 v1 + a2 λ2 v2 . Ясно, что M n v = a1 λn1 v1 + a2 λn2 v2 . И теперь очевидно, что вектор M n v будет неограниченно возрастать, если выполняется условие |λ1 | > 1 или |λ2 | > 1 и при этом условии матрица M будет неустойчивой. Если же выполняется условие |λ1 | ≤ 1 и |λ2 | ≤ 1, то вектор M n v будет оставаться ограниченным и матрица будет устойчивой. Итак, вопрос об устойчивости лазерного резонатора — это вопрос о величинах модулей собственных значений матрицы этого резонатора. Cобственные значения матрицы M A B M= C D являются корнями характеристического уравнения A − λ B = 0, C D − λ то есть квадратного уравнения λ2 − (A + D)λ + AD − BC = 0. Критерий устойчивости. Матрица лазерного резонатора, как и матрица любой оптической системы, имеет свою специфическую особенность — ее определитель равен единице AD − BC = 1. В самом деле, она является произведением матриц перемещения T и матриц отражения R, определитель которых очевидно равен единице, а при перемножении матриц определители тоже перемножаются. Так что в случае матричного резонатора характеристическое уравнение имеет вид λ2 − (A + D)λ + 1 = 0. Используя теорему Виета, получаем что λ1 λ2 = 1. Отсюда следует: если λ1 и λ2 действительные (и не равны ±1), то у одного из них модуль больше 1 и резонатор неустойчивый, если же λ1 и λ2 комплексные, то они сопряжены и модуль каждого из них равен 1 — резонатор устойчивый. Итак, получен новый критерий устойчивости 5 если λ1 и λ2 комплексные, то резонатор устойчивый если λ1 и λ2 действительные, то резонатор неустойчивый. Вопрос о действительности корней квадратного уравнения решается знаком дискриминанта, который в данном случае имеет вид (A + D)2 − 4. Так что мы можем переписать критерий устойчивости в виде если (A + D)2 − 4 < 0, то резонатор устойчивый если (A + D)2 − 4 > 0, то резонатор неустойчивый. Наконец, если проделать конкретные вычисления и выразить элементы матрицы M = R1 T21 R2 T12 через радиусы зеркал R1 и R2 и расстояние L между ними, то предыдущая формулировка критерия устойчивости примет окончательный вид если (L − R1 )(L − R2 )(L − R1 − R2 ) < 0, то резонатор устойчивый если (L − R1 )(L − R2 )(L − R1 − R2 ) > 0, то резонатор неустойчивый. Или почти окончательный вид — в предположении R1 < R2 можно, наконец, записать если L < R1 или R2 < L < R1 + R2 , то резонатор устойчив. Это классический результат, который показывает, что при фиксированных радиусах зеркал и переменном расстоянии между ними имеются две зоны устойчивости. Первая — это когда расстояние между зеркалами не превосходит меньшего радиуса. И вторая — когда расстояние заключено в пределах от большего радиуса до их суммы. 6