УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ МАЛОГО КОСМИЧЕСКОГО
реклама

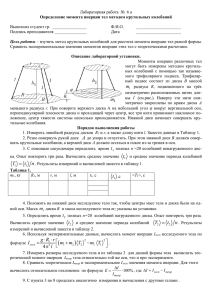
УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ МАЛОГО КОСМИЧЕСКОГО АППАРАТА ФОРМАТА ”CUBESAT” Бекасова А.Г., Исайченко В.И. Научный руководитель: доцент кафедры ТПС Гормаков А. Н. Национальный исследовательский Томский политехнический университет г. Томск, Россия DEVICE FOR MEASURING THE MOMENT OF INERTIA OF SMALL SPACECRAFT FORMAT "CUBESAT" Bekasova A.G., Isaychenko V.I. Supervisor: Associate Professor of TPU Gormakov A.N. National Research Tomsk Polytechnic University Tomsk, Russia Момент инерции — важнейшая физическая величина, характеризующая распределения масс в теле и являющаяся наряду с массой мерой инертности тела при его вращательном движении. Знание момента инерции необходимо для любых тел, совершающих вращательное движение — от узлов обычных приборов до сложнейших больших и малых космических аппаратов, а также отдельных их модулей. Но, как правило, такие достижения науки и техники имеют очень сложную форму и состоят из материалов разной плотности. Поэтому теоретический расчет их моментов инерции не представляется возможным. В таких случаях применяются различные экспериментальные способы измерения этой величины, которых существует огромное количество (метод падающего груза, метод свободного выбега (самоторможения), метод вспомогательного маятника и т. д.). В настоящее время существует множество приборов и установок, измерения которых основываются на вышеназванных методах. Каждый из них имеет свою сферу применимости и степень актуальности. Целью данной работы является исследование установки для измерения момента инерции методом крутильных колебаний и ее доработка. Данный прибор может использоваться для измерения моментов инерции тел произвольной формы и размеров, вписывающихся в цилиндр диаметром 160 мм и высотой 240 мм, что свидетельствует о его универсальности. В частности, она удобна для измерения момента инерции малого космического аппарата типа “CubeSat”, состоящего из одного или двух модулей размерами 100х100х100 мм. Метод наиболее крутильных точным. Его колебаний суть является заключается в следующем. Измеряемое тело подвешивается на упругом стержне, приложенная к телу внешняя сила отклоняет его на некоторый угол φ, заставляя совершать крутильные колебания вокруг оси стержня. При этом период крутильных колебаний тела зависит от момента инерции. Эта зависимость отражена в формуле: Рис. 1 Метод крутильных колебаний ܶ = 2ߨට м где его (1) ܬм – момент инерции тела; D – крутильная жесткость стержня. Момент инерции крутильного маятника Jм равен сумме моментов инерции свободной клетки Jк и тела J, находящегося внутри клетки: Jм=J+Jк(2) Подставив в формулу (1), получим: ܶ = 2ߨට ାк (3) Период колебаний пустой клетки: ܶк = 2ߨට К (4) Чтоб избавиться от коэффициента жесткости поделим (3) на (4) и выразим искомый момент инерции измеряемого тела: Тమ ܬ = ܬК (Тమ − 1) К (5) Для определения момента инерции пустой клетки, необходимо воспользоваться эталонным телом, момент инерции JЭ которого известен, либо его несложно рассчитать теоретически. Проведя аналогичные преобразования, получим формулу для определения момента инерции пустой клетки: ܬК = ܬЭ ( Тమк మ Ткశэ ିТమк ), (6) где: TK – период крутильных колебаний пустой клетки; TK+Э – период крутильных колебаний клетки с эталонным телом. В общем виде прибор состоит из клетки с круглойплатформой измеряемый объект, в 1, которую штанги 2 и помещается устойчивого основания 3. Клетка имеет габаритные размеры 160х240 мм и подвешена на вертикальных торсионах 4. Верхний торсион закреплен в штанге 2, а нижний торсион закреплен на основании 3. Принцип действия прибора заключается в следующем. В клетку помещается измеряемое тело, при помощи разметки его необходимо расположить так, Рис.1. Общий вид установки чтобы его ось вращения совпадала с осью вращения клетки, то есть располагалась вертикально по центру. Вручную клетку необходимо отклонить от положения равновесия на некоторый угол, т. е. заставить совершать крутильные колебания. На основании клетки сделана небольшая прорезь, необходимая для определения периода колебаний. Оптический датчик фиксирует моменты времени, в которые нулевая точка клетки проходит мимо своего начального положения. Сигнал поступает на аналогово-цифровой преобразователь, где происходит обработка результатов и вычисление момента инерции тела. В качестве блока преобразований измерительного прибора используется аналоговоцифровой преобразователь на базе ArduinoNANO, подсоединяющийся к ПК, а также щелевой оптический датчик для измерения периода колебаний клетки с исследуемым телом. Код для преобразователя написан в среде LabView. Устройство датчикапоказано на рис. 2. На одной стороне корпуса датчика расположен светодиод инфракрасного диапазона излучения, на другой – фотоприемник. Излучение от светодиода проходит через Рис. 2. Устройство датчика щель на приемник. Датчик закреплен таким образом, что основание клетки располагается в его щели. Когда колебания отсутствуют и клетка покоится в свободном состоянии, излучение с диода проходит через щель и попадает на приемник. Как только клетка отклоняется от состояния равновесия, основание клетки перекрывает доступ сигнала на приемник. Таким образом, отслеживаются и фиксируются моменты времени, когда клетка проходит свое начальное положение. Далее сигнал с датчика поступает напреобразователь и компьютер, который вычисляет период, а далее, по формуле (5) рассчитывает искомый момент инерции. Список литературы 1. Гормаков А.Н., ВыонгСуанЧьен Автоматизированная установка для определения моментов инерции деталей и узлов приборов. Вестник науки Сибири. 2014.№2(12) — Режим доступа:http://sjs.tpu.ru/journal/article/view/1001— Загл. с экрана