ИЗУЧЕНИЕ КОНСТРУКЦИИ, КИНЕМАТИКИ И ОРГАНОВ
advertisement

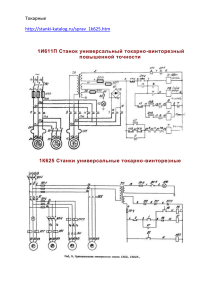
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Оренбургский государственный университет» Кафедра металлообрабатывающих станков и комплексов В.Н. МИХАЙЛОВ, Н.В. СОКОЛОВА ИЗУЧЕНИЕ КОНСТРУКЦИИ, КИНЕМАТИКИ И ОРГАНОВ УПРАВЛЕНИЯ ТОКАРНОГО СТАНКА 16Б16Т1 С УСТРОЙСТВОМ ЧПУ «ЭЛЕКТРОНИКА НЦ - 31» И ПРОВЕРКА ЕГО РАБОТОСПОСОБНОСТИ НА ХОЛОСТОМ ХОДУ МЕТОДИЧЕСКОЕ РУКОВОДСТВО К ЛАБОРАТОРНОЙ РАБОТЕ Рекомендовано к изданию Редакционно – издательским советом государственного образовательного учреждения высшего профессионального образования «Оренбургский государственный университет» Оренбург 2005 ББК 32.815я7 М 15 УДК 681.51/54(075.8) Рецензент доктор технических наук, доцент Поляков А.Н. М 15 Михайлов В.Н., Соколова Н.В. Изучение конструкции, кинематики и органов управления токарного станка 16б16Т1 с устройством ЧПУ «ЭЛЕКТРОНИКА НЦ - 31» и проверка его работоспособности на холостом ходу: Методическое руководство к лабораторной работе. – Оренбург: ГОУ ОГУ, 2005. – 19с. Методическое руководство рекомендуется использовать при выполнении лабораторных работ по дисциплинам: «Металлорежущие станки» для специальностей 120200 и 120100; «Оборудование отрасли» для специальности 030500; «Механизмы металлообрабатывающего оборудования» 210200; «Механизмы и оборудование отрасли» для специальности 060801 для студентов очной, очно-заочной и заочной форм обучения. ББК 32.815я7 © Михайлов В.Н., 2005 © ГОУ ОГУ, 2005 1 Цель работы Изучение конструкции и особенностей кинематической структуры токарного станка 16Б16Т1 и приобретение практических навыков по проверке и работоспособности станка на холостом ходу. 2 Общие положения В универсальных металлорежущих станках с ручным управлением кинематические связи исполнительных органов между собой и источником движения осуществляется через цепи механических элементов и передач. Такие станки называют станками с механическими связями широко используют коробки скоростей и передач, гитары сменных зубчатых колёс, реверсы, управляемые в ручную. Применение в станках систем числового программного управления приводит к замене традиционных нерегулируемых источников движения на управляемые по программе двигатели (асинхронные с частотно-токовом управлением, постоянного тока и т.д.), позволяющие регулировать скорость, направление, а иногда и путь создаваемого ими движения. Но замена механических связей на немеханические и применение в станка систем числового программного управления не изменяет сущности самих кинематических связей и условий кинематического согласования перемещений или скоростей между исполнительными органами металлорежущих станков. Применение в станках систем ЧПУ приводит прежде всего к упрощению механической части кинематической структуры станка, а следовательно, и его конструкции за счёт значительного сокращения протяженности громоздких цепей с механическими звеньями и передачами, замена их немеханические цепи и даже полного их устранения, в станках с числовым управлением отпадает необходимость в механических органах настройки движений в виде гитар, а также суммирующих механизмов, реверсов, сцепных муфт и др. Использование в станках систем ЧПУ привело к упрощению структуры простой кинематической группы за счёт сокращений протяженности её внешней кинематической связи и во многих случаях исключения органов механической настройки движения на скорость и направление. Структура простой кинематической группы обусловлена типом источника движения и величины его диапазона регулирования по скорости. Самой простейшей и распространенной является структура, в которой источник движения с помощью соединительной муфты стыкуется непосредственно с исполнительным органом I (рисунок 1а) или с ходовым винтом шариковой винтовой пары, гайка которой жестко связна с исполнительным органом П (рисунок 1б). Другой встречающийся в станках ЧПУ вид простой кинематической группы отличается от простейшей наличием дополнительного участка механической связи между источником движения и исполнительным органом III (рисунок 1в). На этом участке располагается орган настройки IАКС на скорость в виде автоматизированной коробки скоростей (АКС) или шестерёнчатого редуктора для уменьшения нагружающего момента на валу регулируемого высокооборотного двигателя постоянного тока. В качестве иллюстрации особенностей кинематической структуры металлорежущих станков с ЧПУ рассмотрим структурные кинематические схемы токарно-винторезного станка с ручным управлением (рисунок 2) и токарного станка с ЧПУ (рисунок3). Для нарезания цилиндрической резьбы на станке необходимо реализовать винтовое движение ФV(В1 П2), состоящее из вращательного движения заготовки В1 и поступательного движения резца П2 параллельно оси вращения заготовки. Таким образом в кинематической группе, представленной на рисунке 2 внутренняя кинематическая связь реализована в виде функциональной цепи 1-2 между исполнительными органами (шпинделем 1 и продольным суппортом 2), обеспечивающей строгую согласованность перемещений В1 и П2. условием кинематического согласования вращения шпинделя с поступательным перемещением продольного суппорта следующее: - 1 оборот шпинделя ↔Р мм перемещение суппорта, где Р- шаг Внешняя кинематическая связь формообразующей группы реализована в виде цепи 3-1 между источником движения и внутренней кинематической связью. При нарезании резьбы разных шагов и направлений во внутренней связи установлен орган настройки – винторезная гитара сменных зубчатых колёс 1 винт (позволяет изменить соотношение перемещений В1 П2), а также реверс Р1. а) для вращательных исполнительных органов б) для прямолинейно – поступательного органа в) для вращательных исполнительных органов Рисунок 1 - Структурные схемы простых кинематических групп в станках с числовым программным управлением Рисунок 2 - Структурная кинематическая схема токарно-винторезного станка с ручным управлением Рисунок 3 - Структурная кинематическая схема токарного станка с числовым программным управлением Для изменения скорости нарезания резьбы во внешней связи группы установлен орган настройки jv на скорость в виде коробки скоростей. В токарном станке с ЧПУ полностью сохраняется условие кинематического согласования вращения шпинделя с поступательным перемещением суппорта. Кинематическая структура такого станка представляет собой сочетание двух частных структур. Первая структура с двумя простыми кинематическими группами Фv (В1) и Фs (П2) (используется при точении). Вторая – с одной сложной кинематической группой Фv(В1 П2) (используется при нарезании резьбы), (рисунке 3). Каждый рабочий орган станка - шпиндель I и суппорт II имеет свой источник движения М1 и М2. Внутренняя кинематическая связь группы Фv (В1) обеспечивается связью вращательной кинематической пары шпиндель - опоры в шпиндельной бабке. Внешняя связь группы представляет собой механическую цепь 3-1 между источником движения М1 (регулируемым асинхронный электродвигатель) и шпинделем станка. Необходимые скорость и направление движения В обеспечивается согласно управляющей программе (УП) через устройство УЧП автоматической коробкой скоростей. Внутренняя связь кинематической группы Фs (П2) обеспечивается связью поступательной кинематической пары продольный суппорт – направляющие станины станка. Внешняя связь группы короткая и состоит из соединительной группы муфты и шариковой винтовой передачи винт-гайка. В качестве источника движения группы Фs (П2) применяется регулируемый электродвигатель постоянного тока М 2. Требуемые характеристики параметров движения П2 – скорость, направление, путь и исходная точка траектории – обеспечиваются согласно управляющей программе через устройство ЧПУ. При нарезании цилиндрической резьбы известное условие кинематического согласования: - 1 оборот шпинделя ↔Р мм перемещения суппорта обеспечивается внутренней функциональной цепью между шпинделем станка и продольным суппортом, реализующей внутреннюю кинематическую связь с группами Фv(В1 П2). Эта цепь состоит из участков механической и немеханической связи и включает в себя элементы: - шпиндель 1- датчик обратной связи (ДОС1)- устройство ЧПУ – источник движения М2 –продольный суппорт. В качестве датчика обратной связи используется фотоэлектрический резьбонарезной измерительный преобразователь, связанный со шпинделем станка, предназначенный для фиксирования фактического угла поворота шпинделя. Таким образом, рассмотренная кинематическая структура токарного станка с ЧПУ имеет следующие особенности: 1) каждый рабочий орган имеет свой источник движения; 2) кинематическая связь Фv (В1П2) реализуется через механические и немеханические элементы; 3) в структуре отсутствует традиционные органы управления ручной настройки движения на соответствующие параметры. 3 Описание лабораторной установки В состав лабораторной установки входят: станок 16Б16Т1; стенды: АКС (N1) и винт-гайка (N2). 3.1 Назначение лабораторной установки Токарный станок с числовым программным управлением модели 16Б16Т1 предназначен для токарной обработки деталей типа тел вращения со ступенчатыми и криволинейным профилем в том числе и для нарезания резьб, в полуавтоматическом цикле. Управление станком осуществляется от программы, вводимой в память управляющей системы с пульта оперативного управления или с кассеты внешней памяти. Станок может быть использован в механических цехах машиностроительных заводов с единичным повторяющимся, мелкосерийным и серийным производством. Класс точности станка по ГОСТ 18097-93-II. 3.2 Основные технические данные и характеристики станка Наибольший диаметр устанавливаемого изделия на станине, мм Наибольший диаметр обрабатываемого изделия над суппортом, мм Наибольшая длина устанавливаемого изделия, мм Наибольшая длина хода суппорта, мм продольного поперечного Количество частот вращения шпинделя, шт. Пределы частот вращения шпинделя, об/мин Количество частот вращения шпинделя в одном диапазоне, переключаемых по программе, шт. Пределы управляемых по программе частот об/мин Максимальная скорость продольной подачи при нарезании резьбы, м/мин Пределы величин оборотных подач, мм/об: продольных поперечных Максимальная скорость рабочей подачи, мм/мин Скорость быстрых ходов, мм/мин: продольных поперечных Дискретность перемещений, мм продольных поперечных Количество однопозиционных резцедержателей, мм Количество позиций автоматической поворотной резцовой 320 125 750 700 210 18 от 40 до 2000 от 56 до 2300 12 40-500; 160-2000 4000 от 0,01 до 20,47 от 0,005 до 0,23 1200 6000 или 8000 5000 0,01 0,005 2 головки Присоединительные размеры однопозиционного резцедержателя оп ОСТ2-У16-I-78 (ласточкин хвост), мм Высота резца, устанавливаемого в резцедержателе, мм Наибольший крутящий момент на шпинделе, Н·м Габаритные размеры станка без приставных устройств, мм длина ширина высота Площадь, занимаемого электрошкафом, м2 Масса станка без приставных устройств 6 90 25 600 3000 1330 1870 1,9 2350 или 2150 3.3. Расположение составных частей и органов управления Таблица 1 - Перечень составных частей станка Позиции смотри Наименование рисунок 4 и 5 1 Станина 2 Винтовая пара качения 50 × 10 3 Кожухи 4 Коробка передач 5 Шпиндельная бабка 6 Привод датчика резьбонарезания 7 Бабка задняя 8 Привод продольных подач 9 Суппорт 10 Винтовая пара качения 32 × 5 11 Привод поперечных подач 12 Резцедержатель 13 Резцедержатель задний 14 Смазка 15 Охлаждение 16 Электрооборудование 17 Освещение 18 Пульт оперативного управления 19 Педаль управления 20 Пневмопривод вращающийся 21 Ограждение Рисунок 4 - Расположение составных частей станка (перечень составных частей см. таблица 1) Рисунок 5 - Расположение составных частей станка (перечень составных частей см. таблица 1) Таблица 2 – Перечень органов управления Поз.см.рисунок6 Органы управления и их назначение 1 Вводной тумблер 2 Тумблер включения освещения 3 Аварийная кнопка "Стоп" 4 Кнопка "Пуск" охлаждения 5 Кнопка "Стоп" охлаждения 6 Маховичок ручного привода Переключатель "Пуск подачи и шпинделя", "Стоп подачи" 7 и "Стоп подачи и шпинделя" 8 Кнопка "Станок готов к работе" 9 Переключатель отключения клавиши ЧПУ Винт крепления кнопки, закрывающий доступ к кассете 10 внешней памяти Квадрат установки ряда чисел оборотов шпинделя 11 (переключения перебора) Квадрат ручного перемещения салазок при отключении 12 станка от электродвигателя или отказе ВМД Отверстие под ключ для ручного перемещения каретки 13 при отключении станка от электросети или отказе ВМД (высокомоментный двигатель) 14 Педаль управления пневмозажимом 15 Педаль управления перемещением пиноли задней бабки 16 Рукоятка зажима пиноли задней бабки 17 Ручка крепления задней бабки к станине 18 Лимб настройки усилия зажима пиноли 19 Пульт оперативного управления "Электроника НЦ-31" 20 Винты зажима резца 21 Рукоятка зажима резцедержки или державки 43 11 30 12 14 21 25 41 7 4 3 5 10 19 42 10 16 17 18 13 8 9 Рисунок 6 – Расположение органов управления, сигнализации и табличек с символами 1 56 36 35 37 44 33 32 31 30 2 Таблица 3 – Перечень органов сигнализации Поз. см. рисунок Орган сигнализации и их назначение 6 Лампа молочного цвета сигнализирует о включении станка 30 в сеть Лампа зеленого цвета сигнализирует о работе системы 31 импульсной смазки Лампа зеленого сигнализирует о готовности станка к 32 работе по циклу Лампа зеленого сигнализирует о готовности УЧПУ к 33 работе Лампа желтого цвета сигнализирует о том, что деталь не 34 поджата пинолью задней бабки и пиноль не отведена в крайнее правое положение Лампа желтого цвета сигнализирует о незакрытом 35 ограждении 36 Лампа желтого цвета сигнализирует о не зажатом патроне 37 Указатель нагрузки электродвигателя главного движения Таблица 4 - Перечень графических сигналов, указанных на таблицах станка Символ Наименование Охлаждение Пуск, включение Стоп, отключение Подача Шпиндель Пиноль Подвижное ограничение Импульсная смазка Освещение Продолжение таблицы 4 Символ Наименование Квадрат включения перебора Обдув Поворотная ресцедержка Транспортер стружки АКП (автоматическая коробка передач) HOV X Питание магнитных пускателей золотников и освещения Питание транзисторного блока задержки Готовность станка к работе по циклу NC Готовность ЧПУ к работе по циклу Зажим Разжим σ / min Бесступенчатое регулирование при вращательном движении (увеличение сечения в сторону увеличения показателя) Число оборотов в минуту Точка смазки Вводный выключатель Электросеть Заземление Выключатель Продолжение таблицы 4 Символ 22V Наименование Питание сигнализации 24V Питание розетки 24V Питание муфт АКП и промежуточных реле 3.4 Кинематика станка Привод главного движения станка (рисунок 6) состоит из двухскоростного асинхронного двигателя NI, автоматической коробки передач и шпиндельной бабки. От шкива 2 электродвигателя М1 вращение передаётся посредством плоскозубчатого ремня на шкив 4 входного вала 2 автоматической коробки передач, состоящей из трёх валов и зубчатых колёс с постоянным зацеплением. На среднем валу 3 автоматической коробки передач зубчатые колёса закреплены жестко, а на входном и выходном – на подшипниках качения и кинематически связываются с валами при включении соответствующих электромагнитных муфт. Для передачи крутящего момента на каждом валу должно быть включено по одной муфте. Различными комбинациями включения трех муфт 48, 49, 50,51,52,53 достигаются 9 ступеней скорости на входном валу VI автоматической коробки передач. Одновременным включением трех муфт 52,53,59 на входном валу IV получается "кинематический замок", используемый для торможения шпинделя и электродвигателя. От шкива 20 выходного вала автоматической коробки передач вращение передаётся плоскозубчатым ремнем на шкив 21 шпиндельной бабки. Вращение от шкива на шпиндель VII может передаваться посредством зубчатых муфт 23 и 28 "напрямую" или через понижающую, состоящую из зубчатых колёс 22, 25, 26, 27. таким образом с учетом перекрытия части ступеней чисел оборотов на шпинделе достигается 18 различных передач вращения. От шпинделя через зубчатые передачи 29, 33, 34, 35 с передаточным отношением 1:1 приводиться во вращение фотоэлектирический датчик. 4 48 10 12 6 7 М 750/1500мин -1 1711 15 49 52 13 29 50 51 9 16 41 42 40 Шпиндельная бабка 59 44 36 46 Привод продольных подач М Мк Задняя бабка38 45 47 Привод поперечных подач Автоматическая коробка скоростей 37 39 38 М Рисунок 7 - Кинематическая схема станка модели 16Б16т1 2 IV III 20 35 ДОК VIII VI 27 34 33 29 ДОК 53 14 28 IX 22 V 23 25 ДОК Привод продольных подач состоит из высокомоментального двигателя ВМDz, упругой муфты, передачи винт-гайка качения 36, 37. В приводе поперечных подач использованы высокомоментальный двигатель ВМДХ, редуктор с безвозвратной передачей 38, 39,40 и передача винт- гайка качения 41 и 42. Датчики обратной связи (ДОС) представляют собой фотоимпульсные преобразователи, установленные в приводах продольных и поперечных подач. Они служат для преобразования угла поворота ходового винта (который создает линейное перемещение суппорта) в электрические импульсы, поступающие в систему ЧПУ. В системе ЧПУ происходит сравнение фактического перемещения суппорта по оси Х или Z с заданным по программе. При совпадении фактического перемещения с заданным, система ЧПУ выдает приводу команду остановиться. Такой привод подачи называется следящим. Станок оснащен шестипозиционным резцедержателем, установленным на суппорте. Смена номера рабочей позиции инструмента осуществляется по программе с помощью двигателя. Перемещение пиноли задней бабки осуществляется электроприводом. С вала двигателя №7 вращение передается на винт 44 с помощью цилиндрической зубчатой передачи 46 и 47. 4 Порядок выполнения лабораторной работы 4.1 Ознакомиться с общим устройством станка и расположением органов управления станка по методическому руководству и практически, осмотрев станок. 4.2 Ознакомиться с устройством и назначением механизмов станка по методическому руководству и практически, осмотрев станок и изучив стенды №1 (АКС), №2 (передача винт-гайка качения). 4.3 Проверить работоспособность станка на холостом ходу. 4.3.1 Включить станок в режиме "маховичок" (см.[4]). 4.3.2 Задать и отработать две-три скорости левого и правого вращения шпинделя. 4.3.3 Отработать перемещения суппорта по осям Х и Z. 4.3.4 Отработать смену позиций шестипозиционной револьверной головки. 4.3.5 Выключить станок. 4.4 Оформить отчет. 4.5 Ответить на контрольные вопросы. 5 Содержание отчета Отчёт по выполненной работе должен содержать следующие данные: 1) назначение и область применения станка; 2) эскиз кинематической схемы автоматической коробки скоростей; 3) перечень основных движений, которые обеспечиваются кинематической схемой станка. 6 Контрольные вопросы 6.1 Основные отличия кинематических структур токарных станков с ЧПУ от универсальных токарно-винторезных станков. 6.2 Условие кинематического согласования перемещений шпинделя и суппорта при нарезании резьбы в токарных станках с ЧПУ. 6.3 Составные части и работа привода главного движения станка модели 16Б16Т1 (по кинематической схеме). 6.4 Приводы продольных и поперечных подач станка модели 16Б16Т1. 6.5 Функции датчиков обратной связи в следящих приводах подач. Список использованных источников 1 Металлорежущие станки: Учебник машиностроительных втузов/ Под ред. В.З. Пуша. – М.: Машиностроение, 1986.-256с. 2 Программное управление станками: Учебник для машиностроительных вузов/ В.Л. Сосонкин, О.П. Михайлов, Ю.А. Павлов и др. / Под ред. В.Л. Сосонкина. – М.: Машиностроение, 1981. – 393с. 3 Руководство по эксплуатации 16Б16Т1.000РЭ. Станок токарный модели 16Б126Т1.