Пути совершенствования системы распределения
реклама

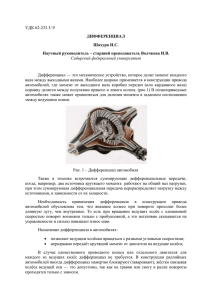
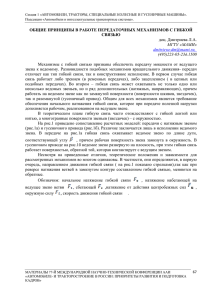
Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». ПУТИ СОВЕРШЕНСТВОВАНИЯ СИСТЕМЫ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ВЕТВЯХ ТРАНСМИССИИ ПОЛНОПРИВОДНЫХ АВТОМОБИЛЕЙ Аспирант Чудаков О.И., д.т.н., проф. Вольская Н.С. ФГБОУ ВПО «МГИУ» e-mail: [email protected] тел. (495) 675-62-42 Введение Трансмиссия служит для передачи мощности двигателя ведущим колесам с минимальными потерями. При этом изменяются ее параметры: крутящий момент, частота и направление вращения. В трансмиссию входят следующие основные агрегаты и механизмы: коробка передач, раздаточная коробка, карданная передача, главная передача, дифференциал, приводы ведущих колес. Основная задача, которую должен решать распределительный механизм при подведении момента к колесу – ликвидация или ограничение в заданных пределах степени буксования. Избежать буксования ведущих колес можно только в том случае, если колесо, имеющее лучшие условия сцепления с опорной поверхностью, будет передавать автомобилю большее тяговое усилие, чем колесо, обладающее худшим сцеплением. Для этого необходимо, чтобы крутящий момент распределялся пропорционально силам сцепления колес с грунтом. Этого можно достичь, используя регулируемые (активные) трансмиссии с правильно подобранными управляющими алгоритмами. Работа над ними позволит выявить способы улучшения ряда эксплуатационных свойств (управляемость, устойчивость и топливная экономичность) полноприводных автомобилей за счет рационального распределения мощности между колесами. Методы распределения крутящего момента Теоретически идеальным является индивидуальный привод на каждое колесо с правильно подобранными управляющими алгоритмами, который может быть реализован при использовании гидрообъемных (ГОТ) или электрических трансмиссий. Однако, из-за высокой стоимости и низкого КПД такой привод не находит применения в массовом автомобилестроении, его использование может быть оправдано только в случае многоосных ПКМ (специалисты фирмы НАМИ-Сервис отмечают, что применении ГОТ для транспортных средств целесообразно при числе ведущих осей не менее 4). Формируется спектр новых конструкций в типаже дифференциалов повышенного трения. Но стоит отметить, что самоблокирующиеся дифференциалы не всегда способны обеспечить распределение крутящего момента адекватное дорожной ситуации. Новые возможности в совершенствовании технического уровня распределения мощности связаны с появлением управляемых фрикционных многодисковых муфт. В таблице 1 показаны основные современные концепции распределения крутяшего момента. МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 120 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». Таблица 1 - Различные методы распределения крутящего момента между колесами ведущей оси Бездифференциальное Дифференциал с Регулирование распределения распределение момента с Название управляемым изменением тормозных сил помощью фрикционных коэффициента блокировки муфт Дифференциал с дополнительными подключаемыми планетарными редукторами Схематичное изображение Распределение момента Максимальный момент на забегающем колесе Момент на отстающем колесе Энергетические потери Позволяет увеличивать момент момент только на отстающем колесе 1 M з = ⋅ M вх ⋅ k p ⋅ ϕo 2 , kp = 0 ÷ ϕmax ϕmin 1 M з = ⋅ M вх ⋅ k p ⋅ ϕo 2 Малые, на создание внутреннего трения в дифференциале Позволяет подводить различный момент к каждому колесу за счет приложения тормозного момента 1 M з = ⋅ M вх + M T 2 1 M о = ⋅ M вх + M T 2 Позволяет подводить момент к колесам в любом соотношении, в том числе подводить весь момент к одному колесу ⋅ϕ min M з = M вх ⋅ ϕ з ⋅ϕ − M min T M о = ( M 1 − M з )ϕ 0 Большие, из-за использованания тормозной системы Большие, из-за постоянной пробуксовки фрикционных муфт Позволяет увеличивать момент на забегающем колесе за счет изменения степени блокирования муфты M max з = 1 ⋅ M + U ⋅ M cl − M cl 2 вх Mо = 1 ⋅ M вх − U ⋅ M cl 2 Средние, определяются степенью блокировки муфты МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 121 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». Использование дифференциала с управляемым изменением коэффициента блокировки в пределе (если принять, что дифференциал полностью заблокирован) позволяет получить на колесе момент, равный половине пришедшего на корпус дифференциала. В системе, регулирующей момент за счет распределения тормозных сил при наличии простого симметричного дифференциала также невозможно распределить на одно из колес момент больший, чем половина входного. При имитации блокировки дифференциала часть энергии двигателя идет на нагрев тормозных механизмов, снижая таким образом полный КПД трансмиссии. Приняв во внимание достаточно высокий КПД традиционных типов трансмиссий, мы увидим, что его суммарное значение с учетом работающей тормозной системы будет сравнимо с показателями трансмиссий с индивидуальным приводом колес. Бездифференциальное распределение момента за счет регулируемой блокировки фрикционных муфт позволяет подвести весь момент, приходящий на заднюю ось подвести к одному колесу. По возможностям регулирования эта система аналогична гидравлическим трансмиссиям, но при этом обладает меньшей массой и сложностью. Основным недостатком такого подхода является постоянная пробуксовка фрикционных муфт, что отрицательно сказывается на долговечности и КПД. Поэтому на автомобилях использование такой системы рационально только для осуществления временного подключения колес. Использование простого симметричного дифференциала с дополнительными планетарными редукторами, подключение которых управляется фрикционными муфтами позволяет перераспределять крутящий момент, приходящий на заднюю ось между колесами оси в различной пропорции. Диапазон регулирования определяется передаточным числом планетарного редуктора. Установка такой системы наиболее рациональна в заднем мосту. Установка на оси с управляемыми колесами приводит к нарушению чувства руля. В последнее время наблюдается появление большого числа различных вариантов подобных систем. Обычно они состоят из дифференциала (конического или цилиндрического), планетарных передач, и двух пакетов фрикционов (для левого и правого колес), которые замыкаются на корпус дифференциала либо на картер главной передачи. Наиболее широкий диапазон перераспределения момента можно получить в системах, у которых фрикционные диски замыкаются на картер главной передачи. Рассмотрим некоторые из этих конструкций подробнее Система AYC Разработана компанией MMC (патент США №5415598 – Vehicular left/right drive torque adjusting apparatus, 1995). AYC (Active Yaw Control) это динамическая система управления поворачивающим моментом и стабилизации курсовой устойчивости. Она позволяет регулировать крутящий момент, передаваемый от двигателя, между левым и правым задними колёсами, в зависимости от свойств опорной поверхности, положения руля и педали акселератора, частоты вращения колёс и скорости автомобиля. Исполнительный механизм системы (рис. 1) занимает место дифференциала в раздаточной коробке. Он включает в себя простой симметричный дифференциал 2, выходной вал 5 которого соединен с фрикционами cl1 и cl2, и ускоряющей передачи 4, необходимой для связи корпуса дифференциала с фрикционами. Для их сжатия используется гидропривод. Когда по команде электроники один из двух фрикционов вступает в работу, происходит перераспределение потоков мощности, дифференциал перестает быть МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 120 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». симметричным и подает на соответствующую ось больший крутящий момент. Степень проскальзывания фрикционов регулируется блоком управления, и рассчитывается исходя из момента двигателя, скорости автомобиля, угла поворота рулевого колеса, а также значений датчиков пробуксовки, угловых ускорений и поворота вокруг вертикальной оси. Рисунок 1 - Система AYC: 1 – ведущая шестерня; 2 – дифференциал; 3 – левая полуось; 4 – ускоряющая передача; 5 – правая полуось. При необходимости подать дополнительный момент на правое колесо включается сцепление повышающей передачи. В этом случае большая часть крутящего момента передается через редуктор на правую полуось. Моменты на колесах при этом рассчитываются по формулам: z z U1 = d ⋅ a , zb z1 где U1 – передаточное число; z1, za, zb, zd – количество зубьев; M U M k1 = вх − 1 ⋅ M cl2 2 2 где Mвх – момент, приходящий на корпус дифференциала; Mcl – тормозной момент в фрикционах; M U M k2 = вх − 1 ⋅ M cl2 + M cl2 . 2 2 При подаче дополнительного момента на левое колесо включается сцепление понижающей передачи. При этом редуктор осуществляет отбор момента с правой полуоси. Момент на колесах в этом случае определяется следующими соотношениями: z z U2 = c ⋅ 1 , z2 za где U2 – передаточное число; z2 и zc – количество зубьев; M U M k1 = вх + 2 ⋅ M cl1 − M cl1 , 2 2 M вх U 2 M k2 = − ⋅ M cl1 . 2 2 МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 121 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». Теоретические потери энергии при работе AYC, которые возникают в многодисковой муфте при дифференциальной разнице скоростей: Eloss = ∆S ⋅ ∆M , Где ∆S – разница скоростей между дисками муфты; ∆T – разница моментов между левым и правым колесами, которая возникает в результате работы AYC. К недостаткам этой системы относятся значительные габариты и вес, а также сложность конструкции. Система ZF Vector Drive Система разработана совместно фирмами ZF и GKN Driveline (патент США №7442143 – Drive module for a variable torque distribution, 2008). Главным отличием от системы AYC заключается в том, что фрикционы замыкаются на картер раздаточной коробки, а не корпус дифференциала. Это позволяет получить более широкий диапазон перераспределения момента. Кроме того, благодаря иному устройству планетарных редукторов при прямолинейном движении машины они вращаются заодно с полуосями, как единое целое, сокращая механические потери. Устройство системы показано на рис. 2. В ее состав входит симметричный межосевой дифференциал 2, механический планетарные ряды 3 и 5, а также многодисковые фрикционные муфты cl1 и cl2 с электронным управлением для каждой полуоси. Сжатие фрикционов осуществляется за счет винтовой передачи, приводимой от электромотора. По сравнению с использованием гидропривода это позволяет увеличить быстродействие и сократить массу. В получившейся электромеханической системе сочетаются информационные технологии, электроника и механика. При равномерном прямолинейном движении момент распределяется равномерно через симметричный дифференциал. Рисунок 2 - Система ZF Vector Drive: 1 – ведущая шестерня; 2 – дифференциал; 3 – планетарная передача 1; 4 – левая полуось; 5 – планетарная передача 2; 6 – правая полуось; z – количество зубьев. Система оснащена электронным блоком управления, который анализирует сигналы различных датчиков: угла поворота управляемых колес, скорости вращения колес, угла поворота вокруг вертикальной оси, продольного и поперечного ускорения. Также блок управления получает данные о работе двигателя, коробки передач и системы курсовой устойчивости. Это позволяет создать достаточно адекватную картину движения МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 122 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». автомобиля и определять значение необходимого корректирующего воздействия и перераспределять крутящий момент между левым и правым колесами в нужной пропорции. Диапазон регулирования момента зависит от передаточного числа редукторов. Оно определяется по следующей формуле: z z U= a⋅ c , zb zd где za, zb, zc и zd – количество зубьев. При необходимости подать дополнительный момент на правое колесо блокируется фрикционная муфта cl2 и часть момента с корпуса дифференциала переходит через планетарную передачу 5 на правую полуось. Величина момента при этом определяется следующим соотношением: 1 M k 2 = ⋅ M вх + U ⋅ M cl2 − M cl2 2 , где M cl2 – тормозной момент в фрикционах. При этом момент на левом колесе будет равен: 1 M k 1 = ⋅ M вх − U ⋅ M cl 2 2 . При подаче дополнительного момента на левое колесо соотношения моментов определяются аналогично, в формулах необходимо только заменить M cl2 на M cl1 . Таким образом, в этой системе сочетаются возможность управления режимами работы и высокое быстродействие при меньших габаритах по сравнению с аналогичными системами. В рамках исследования предлагается ее использование в трансмиссии автомобиля. Выводы По рассмотренным способам распределения крутящего момента видно, что достижение широкого диапазона регулирования крутящего момента между колесами с достаточно высоким КПД возможно при использовании дифференциалов с дополнительными планетарными редукторами, подключение которых осуществляется многодисковыми муфтами, управляемых электроникой. Для определения критических режимов движения в рассмотренных системах используются датчики угловой скорости автомобиля относительно вертикальной оси и бокового ускорения, однако их показания важны для высокоскоростных режимов движения, что редко характеризует движение по пересеченной местности. В диссертации планируется предложить критерии эффективности движения автомобиля вне дорог, способы определения параметров движения по деформируемой поверхности, а также создание управляющих алгоритмов. Литература 1. Круташов А.В. Повышение эффективности распределения мощности на основе сочетания дифференциала повышенного трения и системы притормаживания забегающего колеса: учебное пособие/ А.В. Круташов – 1-е изд. – М.: МГТУ «МАМИ», 2010. – 22 с. 2. Келлер А.В. Принципы и методы распределения мощности между ведущими колесами автомобильных базовых шасси: монография / А.В. Келлер, И.А. Мурог. – Челябинск: ЧВВАКИУ, 2009. – 218 с. МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 123 Секция 1 «АВТОМОБИЛИ, ТРАКТОРЫ, СПЕЦИАЛЬНЫЕ КОЛЕСНЫЕ И ГУСЕНИЧНЫЕ МАШИНЫ». Подсекция «Автомобили и интеллектуальные транспортные системы». 3. Шухман С.Б. Теория силового привода колес автомобилей высокой проходимости / С.Б. Шухман, В.И. Соловьев, Е.И. Прочко; под ред С.Б. Шухмана – М.: Агробизнесцентр, 2007. – 336 с. 4. Sawase K., Inoue K. Maximum acceptable differential speed ratio of lateral torquevectoring differentials for vehicles. Proc. IMechE, Part D: J. Automobile Engineering, 2008, 223, 967-978. МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 124