Т О М 2
реклама

ТОМ 2
МЕТОДИКА
по построению схем маневрирования в районе аэродрома,
на маршруте и определению безопасных высот пролета
препятствий при использовании методов зональной навигации
2
СОДЕРЖАНИЕ
1 ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И СОКРАЩЕНИЯ, ИСПОЛЬЗУЕМЫЕ В НАСТОЯЩЕЙ
МЕТОДИКЕ ..................................................................................................................................................... 5
2 ОБЩИЕ ПРИНЦИПЫ.............................................................................................................................. 18
2.1. ЗОНЫ УЧЕТА ПРЕПЯТСТВИЙ .................................................................................................... 18
2.2. ЗАПАСЫ ВЫСОТЫ НАД ПРЕПЯТСТВИЯМИ ......................................................................... 20
2.3 УХОД НА ВТОРОЙ КРУГ ПРИ ВЫПОЛНЕНИИ НЕТОЧНОГО ЗАХОДА НА ПОСАДКУ
....................................................................................................................................................................... 22
2.4 ВИЗУАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ................................................................ 25
2.5 КАТЕГОРИИ ВОЗДУШНЫХ СУДОВ. СКОРОСТИ, ИСПОЛЬЗУЕМЫЕ ДЛЯ РАСЧЕТА
СХЕМ .......................................................................................................................................................... 28
2.6 КОНТРОЛЬНЫЕ ТОЧКИ ................................................................................................................ 32
3 КОНЦЕПЦИЯ RNAV ................................................................................................................................ 33
3.1. ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................... 33
3.2 КОМПОНЕНТЫ НАВИГАЦИОННЫХ ПОГРЕШНОСТЕЙ .................................................... 34
3.3 ПОГРЕШНОСТЬ ТЕХНИКИ ПИЛОТИРОВАНИЯ ................................................................... 34
3.4 ЗОНА УЧЕТА ПРЕПЯТСТВИЙ ...................................................................................................... 35
4 RNAV НА ОСНОВЕ БАЗОВОЙ GNSS .................................................................................................. 39
4.1 ОБЩИЕ ПОЛОЖЕНИЯ .................................................................................................................... 39
4.2 ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ БАЗОВОГО ПРИЕМНИКА GNSS .................... 39
4.3 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ............................................................................... 40
5 RNAV НА ОСНОВЕ DME/DME .............................................................................................................. 44
5.1 ОБЩИЕ ПОЛОЖЕНИЯ .................................................................................................................... 44
5.2 ТОЧНОСТЬ ИСПОЛЬЗОВАНИЯ СИСТЕМЫ RNAV НА ОСНОВЕ DME/DME ................. 45
5.3 ДОПУСК НА ТЕХНИКУ ПИЛОТИРОВАНИЯ (FTЕ) ................................................................ 45
5.4 ДОПУСК НА ВЫЧИСЛЕНИЯ В СИСТЕМЕ ............................................................................... 45
5.5 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ............................................................................... 45
6 RNAV НА ОСНОВЕ VOR/DME .............................................................................................................. 50
6.1 ОБЩИЕ ПОЛОЖЕНИЯ .................................................................................................................... 50
6.2 ТОЧНОСТЬ ИСПОЛЬЗОВАНИЯ СИСТЕМЫ RNAV НА ОСНОВЕ VOR/DME ................. 50
6.3 ДОПУСК НА ТЕХНИКУ ПИЛОТИРОВАНИЯ (FTЕ) ................................................................ 51
6.4 ДОПУСК НА ВЫЧИСЛЕНИЯ В СИСТЕМЕ (ST) ....................................................................... 51
6.5 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ............................................................................... 51
7 МИНИМАЛЬНАЯ ДЛИНА УЧАСТКА, ОГРАНИЧЕННОГО ДВУМЯ ТОЧКАМИ ПУТИ
РАЗВОРОТА .................................................................................................................................................. 55
8 ЗАЩИТА РАЗВОРОТА И ОЦЕНКА ПРЕПЯТСТВИЙ ..................................................................... 71
8.1 ОБЩИЕ ПОЛОЖЕНИЯ .................................................................................................................... 71
8.2 СКОРОСТЬ .......................................................................................................................................... 71
8.3 МЕТОДЫ ПОСТРОЕНИЯ РАЗВОРОТОВ ................................................................................... 71
8.4 ОПРЕДЕЛЕНИЕ САМОЙ РАННЕЙ И САМОЙ ПОЗДНЕЙ ТОЧЕК РАЗВОРОТА ............ 72
8.5 МЕТОД ДУГИ ОКРУЖНОСТИ ...................................................................................................... 74
8.6 МЕТОД СПИРАЛИ ВЕТРА .............................................................................................................. 75
8.7 МЕТОД РАЗВОРОТА RF .................................................................................................................. 78
8.8 ОЦЕНКА ПРЕПЯТСТВИЙ............................................................................................................... 79
ПРИЛОЖЕНИЕ А К РАЗДЕЛУ 8 УПРОЩЕННЫЙ МЕТОД ОГРАНИЧИВАЮЩИХ
ОКРУЖНОСТЕЙ .......................................................................................................................................... 94
9 ПОСТРОЕНИЕ Т- ИЛИ Y-ОБРАЗНЫХ СХЕМ НА ОСНОВЕ RNAV ............................................ 96
3
9.1 ОБЩИЕ ПОЛОЖЕНИЯ .................................................................................................................... 96
9.2 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ............................................................... 100
9.3 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ .................................................. 102
9.4 КОНЕЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ .................................................................. 102
9.5 УХОД НА ВТОРОЙ КРУГ ПРИ НЕТОЧНОМ ЗАХОДЕ НА ПОСАДКУ ............................. 104
10 АБСОЛЮТНАЯ ВЫСОТА ПРИБЫТИЯ В РАЙОН АЭРОДРОМА (ТАА) .............................. 106
10.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 106
10.2 ПОСТРОЕНИЕ ................................................................................................................................ 106
10.3 БУФЕРНАЯ ЗОНА ......................................................................................................................... 107
10.4 ДУГИ СТУПЕНЧАТОГО СНИЖЕНИЯ ТАА И ПОДСЕКТОРЫ ........................................ 107
10.5 ОПУБЛИКОВАНИЕ ...................................................................................................................... 109
11 КРИТЕРИИ ПОСТРОЕНИЯ СХЕМ .................................................................................................. 112
11.1 СХЕМЫ ВЫЛЕТА .......................................................................................................................... 112
11.2 СХЕМЫ ПРИБЫТИЯ И ЗАХОДА НА ПОСАДКУ ................................................................. 119
11.3. СХЕМЫ НЕТОЧНОГО ЗАХОДА НА ПОСАДКУ .................................................................. 126
12 СХЕМЫ ЗАХОДА НА ПОСАДКУ С ВЕРТИКАЛЬНЫМ............................................................. 130
12.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 130
12.2 СТАНДАРТНЫЕ УСЛОВИЯ ....................................................................................................... 131
12.3 УЧАСТОК APV ............................................................................................................................... 131
12.4 ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОЙ ПУБЛИКУЕМОЙ ТЕМПЕРАТУРЫ ...................... 133
12.5 ПОСТРОЕНИЕ ПОВЕРХНОСТЕЙ OAS ................................................................................... 134
12.6 ОПРЕДЕЛЕНИЕ OCH ДЛЯ ПРЕПЯТСТВИЙ ЗАХОДА НА ПОСАДКУ И УХОДА НА
ВТОРОЙ КРУГ ........................................................................................................................................ 139
13 СХЕМЫ ТОЧНОГО ЗАХОДА НА ПОСАДКУ С ИСПОЛЬЗОВАНИЕМ НАЗЕМНОЙ
СИСТЕМЫ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ GBAS.......................................................... 147
13.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 147
13.2 ПОСТРОЕНИЕ СХЕМ................................................................................................................... 148
13.3 СТАНДАРТНЫЕ УСЛОВИЯ ....................................................................................................... 148
13.4 ДАННЫЕ, КАСАЮЩИЕСЯ КОНЕЧНОГО УЧАСТКА ЗАХОДА НА ПОСАДКУ (FAS)
..................................................................................................................................................................... 149
13.5 МИНИМАЛЬНАЯ БЕЗОПАСНАЯ ВЫСОТА ПРОЛЕТА ПРЕПЯТСТВИЙ ДЛЯ ЗАХОДА
НА ПОСАДКУ (OCA/H) ........................................................................................................................ 149
13.6 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ............................................................. 151
13.7 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ................................................ 152
13.8 ТОЧНЫЙ УЧАСТОК .................................................................................................................... 155
13.9 ПРИМЕНЕНИЕ МОДЕЛИ РИСКА СТОЛКНОВЕНИЯ (СRМ) ДЛЯ ОПЕРАЦИЙ С
ИСПОЛЬЗОВАНИЕМ GBAS ДЛЯ РАСЧЕТА OCA/H НА ТОЧНОМ УЧАСТКЕ ЗАХОДА НА
ПОСАДКУ ................................................................................................................................................ 157
13.10 УХОД НА ВТОРОЙ КРУГ ПОСЛЕ ТОЧНОГО ЭТАПА ЗАХОДА НА ПОСАДКУ
(КОНЕЧНЫЙ ЭТАП УХОДА НА ВТОРОЙ КРУГ) ........................................................................ 159
13.11 УХОД НА ВТОРОЙ КРУГ С РАЗВОРОТОМ ......................................................................... 161
ПРИЛОЖЕНИЕ А К РАЗДЕЛУ 13: ПОЯСНЕНИЕ ИНФОРМАЦИИ, ВВОДИМОЙ В ПОЛЯ
ДАННЫХ БЛОКА ДАННЫХ FAS .......................................................................................................... 167
14 МАРШРУТНЫЕ СХЕМЫ ................................................................................................................... 173
14.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 173
14.2 ЗОНА УЧЕТА ПРЕПЯТСТВИЙ .................................................................................................. 173
14.3 ЗАПАСЫ ВЫСОТЫ ....................................................................................................................... 174
14.4 МИНИМАЛЬНАЯ АБСОЛЮТНАЯ ВЫСОТА ПРОЛЕТА ПРЕПЯТСТВИЙ (MOCA) .. 175
4
14.5 МИНИМАЛЬНАЯ АБСОЛЮТНАЯ ВЫСОТА ПОЛЕТА ПО МАРШРУТУ (МЕА)........ 175
15 СХЕМЫ ЗАХОДА НА ПОСАДКУ ДО ТОЧКИ В ПРОСТРАНСТВЕ (PINS) С
ПРИМЕНЕНИЕМ ЗОНАЛЬНОЙ НАВИГАЦИИ (RNAV) ДЛЯ ВЕРТОЛЕТОВ,
ИСПОЛЬЗУЮЩИХ ПРИЕМНИКИ БАЗОВОЙ GNSS ...................................................................... 176
15.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 176
15.2 МАРШРУТЫ ПРИБЫТИЯ .......................................................................................................... 177
15.3 КРИТЕРИИ В РАЙОНЕ ВЕРТОДРОМА ................................................................................... 177
15.4 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ............................................................. 178
15.5 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ................................................ 181
15.6 КОНЕЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ ................................................................ 182
15.7 УЧАСТОК УХОДА НА ВТОРОЙ КРУГ .................................................................................... 184
15.8 ВИЗУАЛЬНЫЙ УЧАСТОК .......................................................................................................... 189
15.9 ПУБЛИКАЦИЯ СХЕМЫ ЗАХОДА НА ПОСАДКУ................................................................ 198
16 КОДИРОВАНИЕ БАЗЫ НАВИГАЦИОННЫХ ДАННЫХ ........................................................... 200
16.1 ОБЩИЕ ПОЛОЖЕНИЯ ................................................................................................................ 200
16.2 ТИПЫ УКАЗАТЕЛЕЙ ОКОНЧАНИЯ ТРАЕКТОРИЙ .......................................................... 200
16.3 ПРИМЕНЕНИЕ ЭЛЕМЕНТОВ ПОСТРОЕНИЯ СХЕМ ........................................................ 207
16.4 ПРАВИЛА КОДИРОВАНИЯ УКАЗАТЕЛЕЙ ОКОНЧАНИЯ ТРАЕКТОРИЙ ................. 207
5
1 ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И СОКРАЩЕНИЯ, ИСПОЛЬЗУЕМЫЕ В
НАСТОЯЩЕЙ МЕТОДИКЕ
Абсолютная высота прибытия в район аэродрома (ТАА). Наименьшая абсолютная высота, которая обеспечит минимальный запас высоты в 300 м над всеми объектами, расположенными в секторе, ограниченном дугой круга радиусом 46 км с центром в начальной контрольной точке захода на посадку (IAF) или, если IAF отсутствует, в промежуточной контрольной точке (IF), и прямыми линиями, соединяющими
концы этой дуги с IF. В совокупности значения ТАА, связанные с некоторой схемой
захода на посадку, рассчитаны на охват зон в 360° вокруг IF.
Абсолютная высота принятия решения (DA) или относительная высота
принятия решения (DH). Установленная абсолютная или относительная высота при
точном заходе на посадку или заходе на посадку с вертикальным наведением, на которой должен быть начат уход на второй круг в случае, если не установлен необходимый
визуальный контакт с ориентирами для продолжения захода на посадку.
Примечание 1. Абсолютная высота принятия решения (DA) отсчитывается от
среднего уровня моря, а относительная высота принятия решения (DH) – от превышения порога ВПП.
Примечание 2. «Необходимый визуальный контакт с ориентирами» означает
видимость части визуальных средств или зоны захода на посадку в течение времени,
достаточного для оценки пилотом местоположения воздушного судна и скорости его
изменения по отношению к номинальной траектории полета. При полетах по категории
III с использованием относительной высоты принятия решения необходимый визуальный контакт с ориентирами заключается в выполнении процедур, указанных для конкретных правил и условий полета.
Примечание 3. В тех случаях, когда используются оба понятия, для удобства
можно применять форму «абсолютная/относительная высота принятия решения» и сокращение «DA/H».
6
Абсолютная высота пролета препятствий (ОСА) или относительная высота
пролета препятствий (ОСН). Минимальная абсолютная высота или минимальная относительная высота над превышением соответствующего порога ВПП или в соответствующих случаях над превышением аэродрома, используемая для обеспечения соблюдения соответствующих критериев пролета препятствий.
Примечание 1. Абсолютная высота пролета препятствий отсчитывается от среднего уровня моря, а относительная высота пролета препятствий – от превышения порога ВПП или, в случае неточных заходов на посадку, от превышения аэродрома или
превышения порога ВПП, если его превышение более чем на 2 м меньше превышения
аэродрома. Относительная высота пролета препятствий для захода на посадку по кругу
отсчитывается от превышения аэродрома.
Примечание 2. В тех случаях, когда используются оба понятия, для удобства
можно применять форму «абсолютная/относительная высота пролета препятствий» и
сокращение «ОСА/Н».
Азимутальная опорная точка GBAS (GARP). GARP определяется как точка,
расположенная с фиксированным смещением 305 м за FPAP на осевой линии схемы.
Она используется для установления ограничений индикатора боковых отклонений.
Базовая точка пересечения (DCP). DCP представляет собой точку на глиссаде,
расположенную непосредственно над LTP или FTP на относительной высоте, определяемой RDH.
Блок данных конечного участка захода на посадку (FAS). Ряд параметров,
определяющих одну схему точного захода на посадку или схему APV и ее соответствующую траекторию захода на посадку.
Визуальный участок до точки в пространстве (PinS). Это участок схемы захода на посадку до PinS для вертолетов от МАРt до места посадки в схеме PinS «Выполняйте полет визуально».
7
Волна геоида. Расстояние (положительное значение или отрицательное значение) между поверхностью геоида и поверхностью математически определенного референц-эллипсоида.
Примечание. В отношении эллипсоида, определенного во Всемирной геодезической системе – 1984 (WGS-84), разница между высотой относительно эллипсоида
WGS-84 и ортометрической высотой геоида представляет собой волну геоида.
Геоид. Эквипотенциальная поверхность в гравитационном поле Земли, совпадающая с невозмущенным средним уровнем моря (MSL) и его продолжением под материками.
Примечание. Геоид имеет неправильную форму вследствие местных гравитационных возмущений (ветровых нагонов, солености, течений и т. д.), и направление силы
тяжести представляет собой перпендикуляр к поверхности геоида в каждой точке.
Глобальная навигационная спутниковая система (GNSS). Глобальная система определения местоположения и времени, которая состоит из одного или нескольких спутниковых созвездий, бортовых приемников, оборудования контроля целостности системы с необходимым функциональным дополнением для обеспечения требуемых навигационных характеристик для намеченной операции.
Дальность по DME. Дальность, измеряемая по линии прямой видимости (наклонная дальность), от источника сигнала DME до приемной антенны.
Дополнительная зона. Зона, установленная с каждой стороны основной зоны
вдоль номинальной линии пути, в пределах которой запас высоты над препятствиями
постепенно уменьшается.
Заход на посадку до точки в пространстве (PinS). Заход на посадку до точки в
пространстве обеспечивается предназначенной только для вертолетов схемой неточного захода на посадку с использованием базовой GNSS. Он ориентирован на некоторую
контрольную точку, местоположение которой позволяет выполнять последующее маневрирование в полете или заход на посадку и посадку, используя визуальное маневрирование в визуальных условиях, позволяющих видеть и обходить препятствия.
8
Зона конечного этапа захода на посадку и взлета (FATO). Установленная зона, над которой выполняется конечный этап маневра захода на посадку до режима висения или посадка и с которой начинается маневр взлета. В тех случаях, когда FATO
должна использоваться вертолетами с летно-техническими характеристиками класса 1,
эта установленная зона включает располагаемую зону прерванного взлета.
Зональная навигация (RNAV). Метод навигации, позволяющий воздушным
судам выполнять полёт по любой желаемой траектории в пределах зоны действия радиомаячных навигационных средств или в пределах, определяемых возможностями автономных средств или их комбинации.
Конечный участок захода на посадку. Участок схемы захода на посадку по
приборам, в пределах которого производится выход в створ ВПП и снижение для посадки.
Контрольная точка ожидания при уходе на второй круг (MAHF). Контрольная точка, используемая при применении RNAV и обозначающая конец участка ухода
на второй круг и центральную точку зоны ожидания при уходе на второй круг.
Контрольная точка разворота при уходе на второй круг (MATF). Отличающаяся от MAPt контрольная точка для обозначения разворота на участке ухода на второй круг.
Минимальная абсолютная высота полета по маршруту (MEA). Абсолютная
высота полета на участке маршрута, которая обеспечивает адекватный прием сигналов
соответствующих навигационных средств и средств связи ОВД, соответствует структуре воздушного пространства и обеспечивает необходимый запас высоты над препятствиями.
Mинимальная абсолютная высота пролета препятствий (MOCA). Минимальная абсолютная высота полета на определенном участке, которая обеспечивает
необходимый запас высоты над препятствиями.
Минимальная абсолютная высота снижения (MDA) или минимальная относительная высота снижения (MDH). Указанная в схеме неточного захода на по-
9
садку или схеме захода на посадку по кругу абсолютная или относительная высота,
ниже которой снижение не должно производиться без необходимого визуального контакта с ориентирами.
Примечание 1. Минимальная абсолютная высота снижения (MDA) отсчитывается от среднего уровня моря, а минимальная относительная высота снижения (MDH) –
от превышения аэродрома или превышения порога ВПП, если его превышение более
чем на 2 м меньше превышения аэродрома. Минимальная относительная высота снижения для захода на посадку по кругу отсчитывается от превышения аэродрома.
Примечание 2. «Необходимый визуальный контакт с ориентирами» означает
видимость части визуальных средств или зоны захода на посадку в течение времени,
достаточного для оценки пилотом местоположения воздушного судна и скорости его
изменения по отношению к номинальной траектории полета. В случае захода на посадку по кругу необходим визуальный контакт с ориентирами в районе ВПП.
Примечание 3. В тех случаях, когда используются оба понятия, для удобства
можно применять форму «минимальная абсолютная/относительная высота снижения»
и сокращение «MDA/H».
Минимальное расстояние стабилизации (MSD). Минимальная дистанция для
завершения маневра разворота, после которого может начинаться выполнение нового
маневра. Минимальное расстояние стабилизации используется для расчета минимального расстояния между точками пути.
Наземная система функционального дополнения (GBAS). Система функционального дополнения, в которой пользователь принимает дополнительную информацию непосредственно от наземного передатчика.
Начальная контрольная точка захода на посадку (IAF). Контрольная точка,
обозначающая начало начального участка и конец участка прибытия, если предусматривается.
Начальный участок захода на посадку. Участок схемы захода на посадку по
приборам между начальной контрольной точкой захода на посадку и промежуточной
10
контрольной точкой или, в соответствующих случаях, конечной контрольной точкой
(или точкой) захода на посадку.
Опорная точка захода на посадку до точки в пространстве (PRP). Опорная
точка, используемая для захода на посадку до точки в пространстве и определяемая
широтой и долготой MAPt.
Основная зона. Установленная зона, расположенная симметрично относительно номинальной линии пути, в пределах которой запас высоты над препятствиями
обеспечивается полностью.
Отклонение на полную шкалу (FSD). Термин, используемый для описания
максимального отклонения от центра, либо индикатора отклонения от курса (CDI), либо индикатора отклонения в вертикальной плоскости (VDI), например, индикатор угла
наклона глиссады, и применяемый в отношении линейного и углового масштабов.
Поперечный допуск (ХТТ). Допуск на контрольную точку, измеряемый перпендикулярно номинальной линии пути и определяемый допусками на бортовое и наземное оборудование, а также допуском на технику пилотирования (FTT).
Продольный допуск (АТТ). Допуск на контрольную точку вдоль номинальной
линии пути, определяемый допусками на бортовое и наземное оборудование.
Промежуточная контрольная точка (IF). Контрольная точка, обозначающая
конец начального участка и начало промежуточного участка.
Промежуточный участок захода на посадку. Участок схемы захода на посадку по приборам соответственно между промежуточной контрольной точкой и конечной
контрольной точкой (или точкой) захода на посадку или между концом обратной схемы, схемы «ипподром» или линии пути, прокладываемой методом счисления, и конечной контрольной точкой (или точкой) захода на посадку.
Прямой визуальный участок (VS). Часть полета от PinS до места посадки; он
может выполняться либо по прямой до места посадки, либо через точку снижения
(DP), в которой возможно некоторое изменение линии пути.
11
Стандартный маршрут вылета по приборам (SID). Установленный маршрут
вылета по правилам полетов по приборам (ППП), связывающий аэродром или определенную ВПП аэродрома с назначенной основной точкой, обычно на заданном маршруте ОВД, в которой начинается этап полета по маршруту.
Стандартный маршрут прибытия по приборам (STAR). Установленный
маршрут прибытия по правилам полетов по приборам (ППП), связывающий основную
точку, обычно на маршруте ОВД, с точкой, от которой может начинаться полет по
опубликованной схеме захода на посадку по приборам.
Схема захода на посадку по приборам (IAP). Серия заранее намеченных маневров, выполняемых по пилотажным приборам, при соблюдении установленных требований, предусматривающих предотвращение столкновения с препятствиями, от начальной контрольной точки захода на посадку или, в соответствующих случаях, от начала установленного маршрута прибытия до точки, откуда может быть выполнена посадка, а если посадка не выполнена, то до точки, от которой применяются критерии
пролета препятствий в зоне ожидания или на маршруте. Схемы захода на посадку по
приборам классифицируются следующим образом:
Схема неточного захода на посадку (NPA). Схема захода на посадку по приборам с использованием бокового наведения, но без использования вертикального наведения.
Схема захода на посадку с вертикальным наведением (APV). Схема захода
на посадку по приборам с использованием бокового и вертикального наведения, но не
отвечающая требованиям, установленным для точных заходов на посадку и посадок.
Схема точного захода на посадку (РА). Схема захода на посадку по приборам
с использованием точного бокового и вертикального наведения при минимумах, определяемых категорией захода на посадку.
Примечание. Боковое и вертикальное наведение представляет собой наведение,
обеспечиваемое с помощью наземного навигационного средства, либо с помощью выдаваемых компьютером навигационных данных.
12
Точка выставления направления траектории полета (FPAP). FPAP представляет собой точку в той же горизонтальной плоскости, что и LTP или FTP, которая
используется для определения направления конечного участка захода на посадку. При
заходах на посадку по направлению осевой линии ВПП FPAP располагается на противоположном пороге ВПП или за ним. Ее местоположение определяется дельтасмещением по длине относительно противоположного порога ВПП.
Точка посадочного порога ВПП (LTP). LTP представляет собой точку, над которой проходит глиссада на относительной высоте, определяемой относительной высотой опорной точки. Она определяется широтой, долготой и высотой относительно
эллипсоида WGS-84. LTP обычно располагается на пересечении осевой линии и порога
ВПП.
Точка пути. Конкретный географический пункт, используемый для определения маршрута зональной навигации или траектории полёта воздушного судна, применяющего зональную навигацию.
Точка пути «флай-бай». Точка пути, которая предусматривает упреждение
разворота в целях выхода на следующий участок маршрута или схемы по касательной.
Точка пути «флайовер». Точка пути, в которой начинается разворот с целью
выхода на следующий участок маршрута или схемы.
Точка ухода на второй круг (MAPt). Точка в схеме захода на посадку по приборам, в которой или до которой для обеспечения минимального запаса высоты над
препятствиями должен начинаться полет по предписанной схеме ухода на второй круг.
Точка фиктивного порога ВПП (FTP). FTP представляет собой точку, над которой проходит траектория конечного участка захода на посадку на относительной высоте, определяемой высотой опорной точки. Она определяется широтой, долготой и
относительной высотой эллипсоида WGS-84. FTP заменяет LTP в том случае, когда
курс конечного участка захода на посадку не совпадает с направлением продолженной
осевой линии ВПП или когда порог смещен относительно фактического порога ВПП.
При заходах на посадку не по направлению осевой линии ВПП FTP располагается на
13
пересечении перпендикуляра из FAS до порога ВПП. Превышение FTP является таким
же, как превышение фактического порога ВПП.
Траектория и указатель ее окончания («Указатель окончания траектории»). Двухбуквенный код, который определяет конкретный тип траектории полета по
участку схемы и конкретный тип окончания этой траектории полета. Указателями
окончания траекторий обозначаются все участки схем RNAV, SID, STAR и захода на
посадку в бортовой базе навигационных данных.
Требуемые навигационные характеристики (RNP). Перечень навигационных
характеристик, необходимых для выполнения полетов в пределах установленного воздушного пространства.
Примечание. Навигационные характеристики и требования определяются для
конкретного типа RNP и/или применения.
Угол наклона траектории в вертикальной плоскости (VPA). Угол снижения
на конечном участке захода на посадку в опубликованных схемах баро-VNAV.
Угол снижения на визуальном участке (VSDA). Угол наклона траектории
снижения с MDA/Н в MAPt/DP до относительной высоты пересечения вертодрома.
APV
–– схема захода на посадку с вертикальным наведением
АТТ
– продольный допуск
BV
– значение буфера
CA
– курс до абсолютной высоты
CDI
– индикатор отклонения от курса
CF
– курс до контрольной точки
C/L
– осевая линия
CRM
– модель риска столкновения
DA/H
– абсолютная/относительная высота принятия решения
DER
– взлетный конец ВПП
14
DME
– дальномерное оборудование
DR
– точка снижения
DTT
– точность использования системы
FA
– курс от контрольной точки до абсолютной высоты
FAF
– конечная контрольная точка захода на посадку
FAP
– точка конечного участка захода на посадку
FAS
– конечный участок захода на посадку
FATO – зона конечного этапа захода на посадку и взлета
FM
– курс от контрольной точки до завершения режима вручную
FMS
– система управления полетом
FPAP
– точка выставления направления траектории полета
FTP
– точка фиктивного порога
FTT
– допуск на технику пилотирования
GARP – азимутальная опорная точка GBAS
GBAS – наземная система функционального дополнения
GLS
– система посадки с использованием GBAS
GNSS – глобальная навигационная спутниковая система
GP
– глиссада
GPA
– угол наклона глиссады
HA
– ожидание/полет по схеме «ипподром» до абсолютной высоты
НСН
– относительная высота пересечения вертодрома
HF
– ожидание/полет по схеме «ипподром» до контрольной точки
HM
– ожидание/полет по схеме «ипподром» до завершения режима вручную
HRP
– контрольная точка вертодрома
IAF
– начальная контрольная точка захода на посадку
IAS
– приборная скорость
15
IF
– промежуточная контрольная точка
ILS
– система посадки по приборам
IMAL – сигнал системы контроля целостности (или порог срабатывания сигнализации контроля целостности)
LTP
– точка посадочного порога ВПП
MA/H – минимальная абсолютная/относительная высота
MAH
– контрольная точка ожидания при уходе на второй круг
MAPt
– точка ухода на второй круг
MAT
– контрольная точка разворота при уходе на второй круг
F
F
MDA/ – минимальная абсолютная/относительная высота снижения
H(НМС)
MEA
– минимальная абсолютная высота полета по маршруту
MOC( – минимальный запас высоты над препятствиями
ΔН)
MOC
– минимальная абсолютная высота пролета препятствий
MSD
– минимальное расстояние стабилизации
MSA,
– минимальная абсолютная высота в секторе
MSL
– средний уровень моря
NPA
– неточный заход на посадку
NSE
– погрешность навигационной системы
OAS
– поверхность оценки препятствий
OCA/
– абсолютная/относительная высота пролета препятствий
A
МБВс
H(НМБ)
16
OCA/
Hfm
– ОСА/Н конечного участка захода на посадку и ухода на второй круг
по прямой
OCA/
– ОСА/Н точного участка
OCS
– поверхность пролета препятствий
OIS
– поверхность обозначения препятствий
PA
– точный заход на посадку
PBN
– навигация, основанная на характеристиках
PDG
– расчетный градиент схемы
PinS
– точка в пространстве
PRP
– опорная точка захода на посадку до точки в пространстве
Hps
RAIM – автономный контроль целостности в прие мнике
RDH
– относительная высота опорной точки (для APV и РА)
RF
– дуга постоянного радиуса до контрольной точки
RNA
– зональная навигация
RNP
– требуемые навигационные характеристики
SA
– зона безопасности
SDF
– контрольная точка ступенчатого снижения
SID
– стандартный маршрут вылета по приборам
SOC
– начало набора высоты
ST
– допуск на инструментальные вычисления
V
STAR – стандартный маршрут прибытия по приборам
TAA
– абсолютная высота прибытия в район аэродрома
TA/H
– разворот на абсолютной/относительной высоте
TAS
– истинная скорость
ТСН
– относительная высота пересечения порога ВПП
17
TF
– линия пути до контрольной точки
THR
– порог ВПП
TNA/
– абсолютная/относительная высота разворота
TP
– точка разворота
TSE
– суммарная погрешность системы
VA
– направление до абсолютной высоты
VI
– направление до пересечения
VM
– направление до завершения режима вручную
VOR
– всенаправленный ОВЧ-радиомаяк
VPA
– угол наклона траектории в вертикальной плоскости
VS
– визуальный участок
H
VSDA – угол снижения на визуальном участке
90.02
VSS
– поверхность визуального участка
WGS
– Всемирная геодезическая система
XTT
– поперечный допуск
КТА
– контрольная точка аэродрома
МСА
– международная стандартная атмосфера
ОВД
– обслуживание воздушного движения
ОВД
– обслуживание воздушного движения
ПЗ-
–
Российская
национальная
государственная
геодезическая
геоцентрическая система координат «Параметры Земли 1990 года»
18
2 ОБЩИЕ ПРИНЦИПЫ
2.1. ЗОНЫ УЧЕТА ПРЕПЯТСТВИЙ
При разработке схем основным фактором безопасности является запас высоты
над препятствиями, в определенной для каждого этапа полета зоне учета препятствий.
Как правило, зона учета препятствий располагается симметрично с каждой стороны намеченной линии пути.
Ширина зон учета препятствий определяется в соответствии с допусками, относящимися к навигационной системе (GNSS, DME/DME, VOR/DME и т.д.), на основе
которой построены маршруты зональной навигации.
Для всех этапов полета, где обеспечивается наведение по линии пути, каждая
половина зоны учета препятствий делится на две равные по ширине части, образуя основную и дополнительную части зоны.
Ширина дополнительной зоны в любой точке ( i ) между двумя контрольными
точками может быть получена путем линейной интерполяции значений ширины в этих
контрольных точках по формуле:
WSP = WS1 +
DP
× (WS2 − WS1 ) ,
L
где WS1 – ширина дополнительной зоны в первой контрольной точке;
WS2 – ширина дополнительной зоны во второй контрольной точке;
W SP – ширина дополнительной зоны в точке i;
D P – расстояние до точки p от первой контрольной точки, измеренное
вдоль номинальной линии пути;
L – расстояние между двумя контрольными точками, измеренное вдоль
номинальной линии пути.
Полный запас высоты над препятствиями, установленный для конкретного участка схемы, предусматривается в основной зоне, а в дополнительной зоне запас высоты
над препятствиями линейно уменьшается от полного запаса до нуля у внешней границы.
19
Запас высоты в дополнительной зоне может быть получен путем линейной интерполяции в пределах от полного запаса у внешнего края основной зоны до нуля в соответствии с формулой:
MOCSY = MOC P × (1 − Y WS )
где MOCP – запас высоты над препятствиями в основной зоне;
МОСSY – запас высоты в дополнительной зоне над препятствием, находящемся на расстоянии Y от внешнего края основной зоны;
WS – ширина дополнительной зоны, соответствующая расположению препятствия;
Y – расстояние от края основной зоны до препятствия, измеренное перпендикулярно номинальной лини пути.
Для определения минимальной безопасной высоты этапов прибытия, начального, промежуточного участков захода на посадку и конечного участка захода на посадку
при неточных заходах на посадку (OCA/H) необходимо:
- определить высоту самого высокого препятствия НПРЕП.max в основной части
зоны учета препятствий;
- определить значение OCA/H для основной части зоны:
OCA/H О = НПРЕП.max + MOCP;
- для каждого препятствия дополнительной части зоны, высота которого превышает значение НПРЕП.max в основной части зоны, определить значение OCA/Hdi:
OCA/H di = НПРЕП i + МОСSY,
где НПРЕПi – высота в метрах i-го препятствия в дополнительной части зоны;
- определить значение OCA/H как максимальное значение из OCA/HО и
OCA/Hdi.
Критерии расчета OCA/H конечного участка при заходах на посадку с вертикальным наведением и при точных заходах на посадку изложены в разделах 12 и 13 соответственно.
20
2.2. ЗАПАСЫ ВЫСОТЫ НАД ПРЕПЯТСТВИЯМИ
2.2.1 Запасы высоты над препятствиями для этапа взлета
2.2.1.1 При разработке схем вылета используется расчетный градиент схемы,
равный 3,3% (5% для ВС категории Н). Расчетным градиентом обеспечивается минимальный запас 0,8% над поверхностью учета препятствий 2,5% (4,2% для ВС категории Н).
2.2.1.2 Минимальный запас высоты над препятствиями (МОС) в основной зоне
составляет 0,8% от расстояния, измеряемого по горизонтали от DER. Над DER МОС
равен нулю.
2.2.1.3 Небольшие и расположенные вблизи ВПП препятствия, для которых:
Н = hпр + MOC ≤ 60 м (MOC = Lпр × 0,8%),
не оказывают влияния на градиент.
2.2.1.4 В зоне начала разворота и в зоне разворота (разворот более чем на 150)
минимальный запас высоты над препятствиями должен быть не менее 90 м (80 м для
ВС категории Н).
2.2.2 Запасы высоты над препятствиями для этапов прибытия и захода на посадку
2.2.2.1 Минимальный запас высоты над препятствиями в основной зоне учета
препятствий составляет:
для участка прибытия – 300 м;
для начального участка захода на посадку – 300м;
для промежуточного участка захода на посадку – 150 м;
для конечного участка неточного захода на посадку с фиксированной точкой
входа в глиссаду – 75 м.
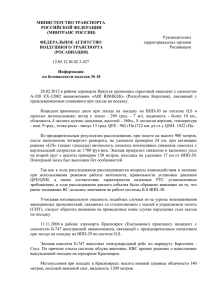
2.2.2.2 При установлении контрольной точки ступенчатого снижения на какомлибо этапе прибытия или захода на посадку из рассмотрения могут быть исключены
препятствия, расположенные в пределах от входной границы зоны учета препятствий
до контрольной точки ступенчатого снижения для которых выполняется соотношение:
21
НПРЕП + MOC ≤ НКТС,
где НПРЕП – высота препятствия в указанной зоне;
MOC – запас высоты;
НКТС – установленная схемой захода на посадку высота пролета контрольной точки ступенчатого снижения.
Препятствия, не пересекающие поверхность с наклоном 15% (25% для ВС категории Н), проходящую в районе контрольной точки ступенчатого снижения, как это
показано на рисунке 2.1, могут не учитываться при определении минимальной безопасной высоты пролета препятствий для захода на посадку.
Рис. 2.1. Установление контрольной точки ступенчатого снижения
на конечном участке захода на посадку
2.2.3 Если схемы предназначены для применения в районах горных аэродромов
запасы высоты на этапах взлета и захода на посадку могут быть увеличены до 100%.
22
2.3 УХОД НА ВТОРОЙ КРУГ ПРИ ВЫПОЛНЕНИИ НЕТОЧНОГО ЗАХОДА НА ПОСАДКУ
Участок ухода на второй круг при выполнении неточного захода на посадку начинается в MAPt и включает три следующих этапа:
начальный этап – начинается в самой ранней MAPt и продолжается до начала
набора высоты (SOC);
промежуточный этап – начинается от SOC до точки, в которой впервые достигается и выдерживается запас высоты над препятствиями, равный 50 м (40 м для ВС
категории Н);
конечный этап – продолжается до точки, в которой начинается новый заход на
посадку, ожидание или возвращение к полету по маршруту.
2.3.1 Существует два типа ухода на второй круг:
уход на второй круг по прямой (включает развороты на 150 и менее);
уход на второй круг с разворотом.
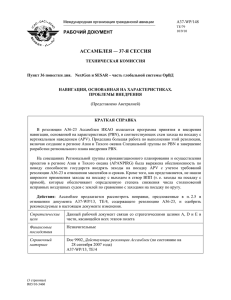
2.3.2 Расчет начала набора высоты (SOC) (рис.2.2). Расстояние от точки начала ухода до точки набора высоты (SOC) определяется суммой:
допуска на MAPt;
переходного допуска (Х).
В свою очередь допуск на MAPt определяется суммой продольного допуска на
MAPt (АТТ) и расстояния (d), учитывающего время реакции пилота. Эта величина соответствует 3 секундам полета на максимальной скорости воздушных судов указанной
категории на конечном участке захода на посадку плюс скорость 19 км/ч попутного
ветра.
Переходный допуск (Х) учитывает расстояние, которое пролетает воздушное
судно при переходе от снижения к набору высоты. Значения переходного допуска соответствуют 15 секундам полёта (кат. Н – 5с) с максимальной для данной категории
ВС скоростью захода на посадку при попутном ветре 19 км/час.
23
В таблице 2.1 приведены значения параметра d и переходного допуска Х для категорий ВС для МСА + 150 и абсолютной высоты 600 м.
Таблица 2.1. Параметр d и переходный допуск Х
Категория ВС
А
В
С
D
E
Н
Параметр d (м)
180
230
280
320
390
160
Переходный допуск Х (м)
890
1140
1380
1600
1950
270
Рис. 2.2. Расчет начала набора высоты SOC
2.3.3 Запасы высоты при уходе на второй круг.
2.3.3.1 В зоне начального этапа ухода на второй круг минимальный запас высоты над препятствиями равен запасу высоты в пределах последней части зоны конечного участка захода на посадку. В некоторых случаях, как это показано на
рис. 2.3, 2.4, запас может быть уменьшен.
2.3.3.2 На промежуточном этапе ухода на второй круг минимальный запас высоты над препятствиями в основной зоне составляет 30 м.
24
2.3.3.3 На конечном этапе ухода на второй круг минимальный запас высоты над
препятствиями в основной зоне составляет 50 м (40 м для ВС категории Н).
2.3.4 Номинальный градиент наклона поверхности ухода на второй круг (на
промежуточном и конечном этапах ухода на второй круг) составляет 2,5% (4,2% для
ВС категории Н). Дополнительно могут указываться более высокие градиенты 3, 4 или
5%.
Рис. 2.3. Запас высоты над препятствиями на промежуточном и конечном
этапах ухода на второй круг
Рис. 2.4. Случай, когда продолжение поверхности ухода
на второй круг полностью перекрывает начальный этап
ухода на второй круг
25
2.4 ВИЗУАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
2.4.1 На величину угла наклона глиссады/градиента снижения могут оказать
препятствия на визуальном участке захода на посадку. Для защиты схемы устанавливается поверхность визуального участка, за которую не должны выступать препятствия, кроме оговоренных в п. 2.4.4.
2.4.2 В горизонтальной плоскости поверхность визуального участка определяется следующим образом.
1) Для схем точного захода на посадку, в которых линия пути конечного участка
захода на посадку совпадает с осевой линией ВПП, поверхность (рис.2.5) имеет базовую ширину, равную ширине внутренней поверхности захода на посадку для ВПП
класса А–Г 120 м или увеличенную до 155 м в случае эксплуатации воздушных судов с
размахом крыла от 65 до 80 м (DL) и 90 м (ВПП класса Д–Е). Начинается на удалении
60 м перед порогом ВПП и простирается параллельно продолжению осевой линии
ВПП до точки, где поверхность достигает значения OCA/H.
2) Для схем неточного захода на посадку с прямой поверхность имеет базовую
ширину 300 м (ВПП класса А–Г) и 150 м (ВПП класса Д–Е). Начинается на удалении
60 м перед порогом ВПП, расширяется с градиентом 15% с обеих сторон продолжения
осевой линии ВПП и заканчивается в точке, в которой поверхность достигает значения
OCA/H (рис.2.6).
Если конечный участок захода на посадку смещен и пересекает продолжение
осевой линии ВПП, расширение (на стороне, ближайшей к направлению конечного
участка захода на посадку) увеличивается на угол смещения (рис.2.7).
Если конечный участок захода на посадку смещен, но не пересекает продолжения осевой линии ВПП, расширение (на стороне, ближайшей к направлению конечного
участка захода на посадку) дополнительно увеличивается на величину, равную смещению конечного участка захода на посадку на расстоянии 1400 м от порога ВПП
(рис.2.8).
26
2.4.3 В вертикальной плоскости поверхность визуального участка начинается на
высоте порога ВПП и имеет наклон на 1,120 меньше угла наклона схемы захода на посадку.
2.4.4 При оценке поверхности визуального участка, препятствия с высотой менее 15 м над порогом ВПП можно не учитывать. Допускаются временные подвижные
препятствия, как например воздушные суда, находящиеся в месте ожидания у ВПП.
Рис.2.5. Поверхность визуального участка для схем точного захода на посадку.
Участок выровнен по осевой линии ВПП
27
Рис.2.6. Поверхность визуального участка для схем неточного захода на посадку
Рис. 2.7. Вид в плане; поверхность визуального участка. Смещенный
конечный участок захода на посадку с пересечением осевой линии ВПП
28
Рис. 2.8. Вид в плане; поверхность визуального участка. Смещенный конечный
участок захода на посадку параллельно осевой линии ВПП
2.5 КАТЕГОРИИ ВОЗДУШНЫХ СУДОВ. СКОРОСТИ, ИСПОЛЬЗУЕМЫЕ ДЛЯ
РАСЧЕТА СХЕМ
2.5.1 Наиболее важным элементом летно-технических характеристик воздушных судов является скорость. Поэтому для обеспечения стандартной основы для связи
между маневренностью воздушных судов и конкретными схемами захода на посадку
по приборам установлены пять категорий воздушных судов (А, В, С, D, Е, Н – вертолеты).
2.5.2 Критерием классификации самолетов по категориям является приборная
скорость пересечения порога ВПП, в 1,3 раза превышающая скорость сваливания в посадочной конфигурации при максимальной сертификационной посадочной массе (категория Н – см. п.2.5.6 «Вертолеты»).
2.5.3 Для расчета схем используются диапазоны скоростей (IAS), приведенные в
таблице 2.2.
29
Таблица 2.2. Приборные скорости (IAS) для расчетов схем (км/ч)
Категория ВС
Классификационная
скорость*
Диапазон скоростей для начального участка захода на
посадку
165/280(205**)
220/335(260**)
295/445
345/465
Диапазон скоростей для конечного участка захода на
посадку
130/185
155/240
215/295
240/345
Максимальные скорости при
уходе на второй круг
Промежуточ- Конечный этап
ный этап
A
менее 169
185
205
B
169/223
240
280
C
224/260
295
445
D/DL (широ261/306
345
490
кофюзеляжные)
E
307/390
345/467
285/425
425
510
Н
Не прим.
130/220***
110/165****
165
165
H (PinS)****
Не прим.
130/220
110/165
130 или 165
130 или 165
* – скорость пересечения порога ВПП, в 1,3 раза превышающая скорость сваливания в
посадочной конфигурации при максимальной сертификационной посадочной массе.
** – максимальная скорость для обратных схем и схем «ипподром».
*** – максимальная скорость для обратных схем и схем «ипподром» до 1800 м включительно составляет 185 км/ч, а выше 1800 м составляет 205 км/ч.
**** – вертолетные схемы захода на посадку до точки в пространстве, основанные на базовой GNSS, могут рассчитываться с использованием максимальных скоростей 220 км/ч на начальном и промежуточном участках и 165 км/ч на конечном участке и участке ухода на второй
круг или 165 км/ч на начальном и промежуточном участках и 130 км/ч на конечном участке и
участке ухода на второй круг.
2.5.4 Указанные приборные скорости полета (таблица 2.2) при расчете конкретных схем, в зависимости от высоты аэродрома и температуры, преобразуются в истинные скорости полета (ТAS).
Истинная скорость находится простым умножением приборной скорости на переводной коэффициент для данной абсолютной высоты и температуры. В таблице 2.3
даны переводные коэффициенты для преобразования приборной скорости (IAS) в истинную скорость (ТAS) для абсолютных высот от 0 до 7500 м при температурах от
МСА-300С до МСА+300С.
30
Таблица 2.3. Таблица перевода приборной скорости (IAS) в истинную скорость (ТAS)
Абсолютная
высота (м)
МСА– МСА– МСА– МСА– МСА–
300
150
250
200
100
МСА
0
400
500
600
1000
1200
1500
1800
2000
2100
2400
2500
2700
3000
3300
3500
3600
3900
4000
4200
4500
5000
5500
6000
6500
7000
7500
0,9465
0,9644
0,9690
0,9736
0,9922
1,0018
1,0163
1,0312
1,0413
1,0464
1,0619
1,0672
1,0778
1,0940
1,1106
1,1219
1,1276
1,1449
1,1507
1,1626
1,1807
1,2119
1,2443
1,2779
1,3130
1,3494
1,3873
1,0000
1,0195
1,0244
1,0294
1,0497
1,0601
1,0760
1,0922
1,1032
1,1088
1,1257
1,1315
1,1431
1,1608
1,1789
1,1912
1,1975
1,2165
1,2229
1,2359
1,2558
1,2900
1,3256
1,3627
1,4013
1,4415
1,4835
0,9556
0,9738
0,9784
0,9831
1,0020
1,0117
1,0265
1,0416
1,0519
1,0571
1,0728
1,0782
1,0890
1,1054
1,1223
1,1337
1,1395
1,1571
1,1631
1,1751
1,1936
1,2253
1,2582
1,2924
1,3281
1,3652
1,4038
0,9647
0,9831
0,9878
0,9925
1,0118
1,0216
1,0366
1,0519
1,0623
1,0676
1,0836
1,0890
1,1000
1,1167
1,1338
1,1455
1,1513
1,1692
1,1753
1,1875
1,2063
1,2385
1,2720
1,3068
1,3430
1,3808
1,4201
0,9736
0,9923
0,9971
1,0019
1,0214
1,0314
1,0466
1,0621
1,0727
1,0780
1,0943
1,0998
1,1109
1,1279
1,1453
1,1571
1,1630
1,1812
1,1874
1,1998
1,2188
1,2516
1,2856
1,3210
1,3578
1,3962
1,4362
0,9825
1,0015
1,0063
1,0111
1,0309
1,0410
1,0565
1,0723
1,0830
1,0884
1,1049
1,1105
1,1217
1,1390
1,1566
1,1686
1,1746
1,1931
1,1993
1,2120
1,2313
1,2645
1,2991
1,3350
1,3725
1,4115
1,4521
МСА+ МСА+ МСА+
100
150
200
1,0172
1,0372
1,0423
1,0474
1,0682
1,0789
1,0952
1,1118
1,1231
1,1288
1,1462
1,1521
1,1640
1,1822
1,2008
1,2135
1,2199
1,2394
1,2460
1,2594
1,2798
1,3150
1,3516
1,3897
1,4295
1,4709
1,5141
1,0257
1,0459
1,0511
1,0562
1,0774
1,0881
1,1046
1,1215
1,1329
1,1387
1,1563
1,1623
1,1743
1,1928
1,2116
1,2245
1,2309
1,2507
1,2574
1,2709
1,2917
1,3273
1,3644
1,4031
1,4434
1,4854
1,5292
1,0341
1,0546
1,0598
1,0650
1,0864
1,0973
1,1140
1,1310
1,1426
1,1485
1,1663
1,1724
1,1846
1,2032
1,2223
1,2353
1,2419
1,2619
1,2687
1,2824
1,3034
1,3395
1,3771
1,4163
1,4572
1,4998
1,5442
МСА+ МСА+
250
300
1,0425
1,0632
1,0685
1,0738
1,0954
1,1064
1,1233
1,1405
1,1523
1,1582
1,1763
1,1824
1,1947
1,2136
1,2330
1,2461
1,2528
1,2730
1,2799
1,2938
1,3150
1,3516
1,3897
1,4294
1,4708
1,5140
1,5590
1,0508
1,0717
1,0770
1,0824
1,1043
1,1154
1,1325
1,1500
1,1618
1,1678
1,1861
1,1923
1,2048
1,2239
1,2435
1,2568
1,2635
1,2840
1,2910
1,3051
1,3266
1,3636
1,4022
1,4424
1,4843
1,5281
1,5737
Приведенная ниже формула используется для величин, не указанных в
таблице 2.3:
TAS = IAS × 171233 ×
[(288 ± VAR) − 0,006496H ]0,5
(288 − 0,006496H) 2,628
где: VAR – отклонение температуры от МСА, 0С;
Н – абсолютная высота, м,
31
МСА – международная стандартная атмосфера (температура воздуха на уровне
моря равна 15 0С).
2.5.5 Там, где требования к воздушному пространству носят критический характер в отношении воздушных судов конкретной категории, схемы могут основываться
на воздушных судах более низких скоростных категорий, при условии ограничения
использования схем этими категориями. В других случаях эта схема может разрабатываться с ограничением по указанной максимальной IAS без ссылки на категорию.
2.5.6 Вертолеты
2.5.6.1. Основанный на скорости сваливания метод определения категории воздушных судов не применяется к вертолетам. В том случае, когда вертолеты выполняют
полеты, как самолеты, схема классифицируется, как соответствующая категории А.
Схемы, специально разработанные только для использования вертолетами, четко обозначаются символом Н. Такие схемы не публикуются на одной карте захода на
посадку по приборам в качестве совместной схемы для вертолетов/самолетов.
2.5.6.2 Предназначенные только для вертолетов схемы рассчитываются с использованием большинства тех же обычных методов и практики, что и для самолетов
категории А. Некоторые критерии, например, минимальные или максимальные воздушные скорости, градиенты снижения и градиенты набора высоты при уходе на второй круг/вылете, могут отличаться, однако принципы остаются теми же.
2.5.6.3 Детализации, касающиеся разработки схем для самолетов категории А,
применяются в равной мере к вертолетам, за исключением приводимых далее специальных изменений. Критерии, которые изменены применительно только к схемам для
вертолетов, соответствующим образом указаны в тексте.
32
2.6 КОНТРОЛЬНЫЕ ТОЧКИ
Схемы с использованием зональной навигации формируются точками пути.
Точки пути задаются географическими координатами – широтой и долготой. Используется Государственная геоцентрическая система координат ПЗ-90.02. Каждой точке
пути присваивается уникальный идентификатор.
Точки пути соединяются прямыми с указанием курса и расстояния между точками. При разработке схем следует использовать минимальное количество точек пути.
В схемах захода на посадку на основе RNAV, от точки начала захода на посадку
до точки пути, в которой завершается участок ухода на второй круг, используется не
более девяти точек.
Контрольными точками схем с применением RNAV являются следующие точки
пути:
начальная контрольная точка захода на посадку – IAF;
промежуточная контрольная точка – IF;
конечная контрольная точка захода на посадку (для неточных заходов на посадку) – FAF;
точка ухода на второй круг (для неточных заходов на посадку) – MAPt;
точка разворота при взлете – ТР;
контрольная точка разворота при уходе на второй круг – MATF;
контрольная точка ожидания при уходе на второй круг – MAНF.
Для введения особых ограничений (например, ограничение скорости, изменение
высоты или пункта передачи донесений для целей УВД) в пределах прямолинейного
участка могут добавляться некоторые точки пути, которые не являются точками пути
разворота или указанными как IAF, IF, FAF или MAPt. К таким точкам относится контрольная точка ступенчатого снижения. Ее местоположение не учитывается при расчете зоны учета препятствий.
Указание наименований контрольных точек (IAF, IF, FAF и т.д.) на схемах является обязательным в дополнение к идентификатору точки.
33
3 КОНЦЕПЦИЯ RNAV
3.1. ОБЩИЕ ПОЛОЖЕНИЯ
3.1.1 Навигация, основанная на характеристиках (PBN), определяется как тип
зональной навигации (RNAV), при которой требования к навигационным характеристикам предписываются в навигационных спецификациях. Навигационная спецификация определяется как совокупность требований к воздушному судну и летному экипажу, необходимых для обеспечения полетов в условиях PBN в пределах установленного
воздушного пространства.
3.1.2 Имеются два типа навигационных спецификаций.
Спецификация RNAV. Навигационная спецификация, которая не включает требования к контролю за выдерживанием характеристик и выдаче предупреждений о их
несоблюдении на борту воздушного судна.
Спецификация RNP. Навигационная спецификация, которая включает требования к контролю за выдерживанием характеристик и выдаче предупреждений о их несоблюдении на борту воздушного судна.
3.1.3 В настоящей методике изложены критерии пролета препятствий при разработке схем в соответствии со следующими навигационными спецификациями:
RNAV 5 – используется на этапе полета по маршруту на основе RNAV в континентальном воздушном пространстве;
RNAV 1 и 2 – используются на этапе полета по маршруту, при SID, STAR и заходах на посадку на основе RNAV вплоть до FAF/FAP;
RNP 4 – используется на этапе полета по маршруту на основе RNAV для обеспечения минимумов бокового и продольного эшелонирования, основанного на расстоянии, в океаническом воздушном пространстве или отдаленных районах;
Basic RNP-1 – используется для полетов на основе RNAV при SID, STAR и заходах на посадку вплоть до FAF/FAP без или под ограниченным наблюдением органов
ОВД и при движении низкой – средней плотности;
34
RNP APCH – используется для обеспечения схем захода на посадку на основе
RNAV вплоть до RNP 0,3, построенных с прямолинейными участками. Этот тип может
включать требование о наличии оборудования баро-VNAV.
3.2 КОМПОНЕНТЫ НАВИГАЦИОННЫХ ПОГРЕШНОСТЕЙ
Требования к точности спецификаций RNAV и RNP определены для бокового и
продольного измерений. Требования спецификаций RNP к контролю за выдерживанием характеристик и выдаче предупреждений определяются для бокового измерения в
целях оценки соблюдения характеристик воздушным судном.
Тремя основными погрешностями в боковой навигации, относящимися к выдерживанию линии пути и определению местоположения воздушного судна, являются
погрешность определения траектории (PDE), погрешность техники пилотирования
(FTE) и погрешность навигационной системы (NSE). Предполагается, что распределение этих погрешностей является гауссовым, вследствие чего распределение суммарной
погрешности системы (TSE) является также гауссовым.
В продольном измерении погрешность техники пилотирования (FTE) не учитывается.
3.3 ПОГРЕШНОСТЬ ТЕХНИКИ ПИЛОТИРОВАНИЯ
95%-ные значения FTE, на основе которых разработаны критерии построения
для применений PBN, представлены в таблице 3.1.
35
Таблица 3.1
Этап полета
Маршрут (расстояние, превышающее или равное 56 км от КТА вылета или назначения)
Район аэродрома (SID, STAR, начальный и
промежуточный участки захода на посадку менее 56 км от КТА)
Конечный участок захода на посадку
Уход на второй круг
FTE (95 %)
в зависимости от требуемой
навигационной спецификации
RNAV 5 – 4 630 м
RNP 4 – 3 704 м
RNAV 2 – 1 852 м
RNAV 1 – 926 м
Basic RNP-1 – 926 м
RNAV 2 – 1 852 м
RNAV 1 – 926 м
Basic RNP-1 – 926 м
RNP APCH – 926 м
RNP APCH – 463 м
RNP APCH – 926 м
3.4 ЗОНА УЧЕТА ПРЕПЯТСТВИЙ
3.4.1 Половина ширины зоны. Половина ширины зоны учета препятствий (½ W)
во всех применениях RNAV и RNP определяется следующим образом:
½ W = 1,5 × XTT + BV,
где XTT – значение поперечного допуска 2σ (TSЕ);
BV – значение буфера.
Посредством добавления значения буфера учитываются отклонения погрешностей, превышающих значение трех стандартных отклонений (3σ). Значения BV, основанные на характеристиках воздушного судна (скорость, маневренность и т.д.) и этапе
полета (время реакции пилота, время воздействия и т.д.) приведены в таблице 3.2.
36
Таблица 3.2
Этап полета
Маршрут, SID и STAR
(расстояние,
превышающее
или равное 56 км от КТА вылета или назначения)
Район
аэродрома
(STAR, начальный и промежуточный участки захода на
посадку менее 56 км от КТА,
SID и уход на второй круг более 28 км, но менее 56 км от
КТА)
Конечный участок захода на посадку
Уход на второй круг и
SID на расстоянии до 28 км от
КТА
BV для самолетов
3 704 м
BV для вертолетов
1 852 м
1 852 м
1 296 м
926 м
648 м
926 м
648 м
В тех случаях, когда в схеме могут использоваться несколько типов навигационных средств (например, DME/DME и базовая GNSS для RNAV 1), ХТТ, АТТ и половина ширины зоны рассчитываются для каждого конкретного навигационного средства, а запас высоты над препятствиями основывается на большем из этих значений.
3.4.2 Слияние зон в точках сопряжения этапов полета
3.4.2.1 Для прибытия и захода на посадку в точке, где изменяется этап полета
и/или ХТТ, ширина зоны определяется с использованием значения буфера предшествующего этапа и значения ХТТ последующего этапа. В том случае, если ширина зоны
последующего участка меньше, чем ширина зоны предшествующего участка, слияние
обеспечивается посредством линии, проведенной под углом 30° к номинальной линии
пути, зафиксированной шириной зоны в точке изменения (например, IF, FAF). Внешний край основной зоны определяет половину ширины всей зоны. На рис. 3.1 показано
сопряжение зон промежуточного и конечного участков захода на посадку.
Половина ширины зоны промежуточного участка захода на посадку:
½ W = 1,5 × ХТТ (в IF) + значение буфера в районе аэродрома.
Половина ширины зоны в точке FAF:
37
½ W = 1,5 × XTT (в FAF) + значение буфера в районе аэродрома.
Половина ширины зоны конечного участка захода на посадку:
½ W = 1,5 × ХТТ (в MAPt) + значение буфера на конечном участке захода на
посадку.
3.4.2.2 Этот же принцип применяется в точке сопряжения этапа полета по маршруту и начального участка захода на посадку.
3.4.2.3 В том случае, если ширина зоны последующего участка больше ширины
зоны предшествующего участка, слияние обеспечивается посредством расширения зоны предшествующего участка под углом 15° в самой ранней точке, где изменяется этап
полета и/или ХТТ. Внешний край основной зоны определяет половину ширины всей
зоны. Слияние зон в точках сопряжения этапов полета при вылете показано на рис.3.2.
Рис. 3.1. Слияние зон в точке FAF
38
Рис. 3.2. Слияние зон в точках сопряжения при вылетах
39
4 RNAV НА ОСНОВЕ БАЗОВОЙ GNSS
4.1 ОБЩИЕ ПОЛОЖЕНИЯ
В данном разделе изложены критерии определения XTT, ATT и половины ширины зоны учета препятствий для схем RNAV на основе базовой GNSS для следующих
навигационных спецификаций:
RNAV 5;
RNAV 2;
RNAV 1;
RNP 4;
Basic RNP-1;
RNP APCH.
Понятие «базовый приёмник GNSS (СНС)» подразумевает бортовое оборудование спутниковой навигационной системы, сертифицированное и одобренное государственным полномочным органом для выполнения полетов в районе аэродрома. Оборудование должно включать:
приёмник сигналов ГЛОНАСС и/или GPS, обеспечивающий функцию контроля
целостности, возможность упреждения разворота и выполнения схемы, выбранной из
только считываемой электронной базы навигационных данных;
систему индикации отклонения от заданной линии курса, обеспечивающую
возможность пилотирования на всех этапах полета или систему связи с бортовыми навигационными приборами, обеспечивающую индикацию отклонения от линии курса на
пилотажных приборах;
систему сигнализации режимов работы бортового оборудования GNSS.
4.2 ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ БАЗОВОГО ПРИЕМНИКА
GNSS
Базовый приемник GNSS имеет три режима: маршрута, район аэродрома и захода на посадку. Каждый режим обладает соответствующими порогами срабатывания
сигнализации RAIM и значениями чувствительности CDI (таблица 4.1).
40
Вылет.
Режим района аэродрома должен быть выбран (автоматически или вручную)
перед взлетом или, когда система задействована в пределах расстояния 56 км от контрольной точки аэродрома (КТА). Считается, что после 56 км система находится в режиме полета по маршруту.
Прибытие и заход на посадку.
До 56 км от КТА система находится в режиме полета по маршруту. Система на
56 км от КТА автоматически меняет чувствительность CDI на режим района аэродрома. По достижении расстояния 3,7 км от FAF система переключается на режим захода
на посадку.
Таблица 4.1
Порог срабатывания сигнализации контроля целостности (IMAL)
3,7 км
1,85 км
0,56 км
Маршрут
Район аэродрома
Заход на посадку
Чувствительность CDI
9,3 км
1,85 км
0,56 км
4.3 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ
4.3.1 ХТТ и АТТ для навигационных спецификаций RNP. Суммарная погрешность
системы (TSE) зависит от погрешности оценки местоположения (погрешности сигнала
в пространстве и погрешности бортового приемника), погрешности определения траектории, погрешности системы отображения и погрешности техники пилотирования.
Навигационные спецификации RNP определяют следующие значения боковой
погрешности TSE:
RNP 4. Боковая TSE и продольная погрешность не превышают ± 7,41 км в течение как минимум 95% общего полетного времени;
Basic RNP-1. Боковая TSE и продольная погрешность не превышают ± 1,85 км в
течение как минимум 95% общего полетного времени;
RNP APCH. Боковая TSE и продольная погрешность не превышают ± 1,85 км в
течение 95% общего полетного времени на начальном и промежуточном участках за-
41
хода на посадку и при уходе на второй круг, когда уход на второй круг основывается
на требовании RNAV. Боковая TSE и продольная погрешность не превышают ± 0,56 км
в течение 95% общего полетного времени на конечном участке захода на посадку.
TSE используется для определения значений ХТТ и АТТ следующим образом:
ХТТ = TSE,
АТТ = 0,8 × TSE.
Критерии RNP APCH применяются только в пределах 56 км от КТА аэродрома
назначения. За пределами этого расстояния следует применять критерии RNAV 1 или
Basic RNP-1.
4.3.2 ХТТ и АТТ для навигационных спецификаций RNAV. Если в навигационной
спецификации RNAV FTE превышает порог срабатывания сигнализации контроля целостности (IMAL) приемника GNSS, ХТТ определяется стандартным методом квадратного корня из суммы квадратов TSE (TSE=NSE+FTE+ST, где ST (погрешность на
вычисления в системе) – 0,463 км).
Если FTE равна или меньше IMAL, ХТТ основывается на IMAL. Значения ХТТ
для навигационных спецификаций RNAV приведены в таблице 4.2.
Таблица 4.2
Этап полета
Маршрут и район аэродрома (>56 км от КТА)
Маршрут и район аэродрома (>56 км от КТА)
Район аэродрома (<56 км от КТА) до IAF
Навигационная
спецификация
RNAV 5
RNAV 1 и 2
RNAV 1 и 2
ХТТ
4 650 м
3 704 м
1 852 м
АТТ = 0,8 × ХТТ.
4.3.3 Половина ширины зоны. Половина ширины зоны учета препятствий (½ W)
в точке пути определяется следующим уравнением:
½ W = ХТТ × 1,5 + BV,
где 1,5 х ХТТ соответствует значению боковой TSE – 3σ.
Значения буфера BV приведены в таблице 3.2.
42
Значения АТТ, ХТТ и результаты расчетов половины ширины для различных
навигационных спецификаций приведены в таблицах 4.3 – 4.9.
Таблица 4.3. ХТТ, ATT и половина ширины зоны для RNP 4
на этапе полета по маршруту (км)
Маршрут/STAR/SID (>56км от КТА)
ХТТ
АТТ
½W
7,41
5,93
14,82
Таблица 4.4. XTT, ATT и половина ширины зоны (½ W) для
Basic RNP-1 (для самолетов) на этапе прибытия, начальном,
промежуточном этапах участках на посадку и этапе вылета (км)
STAR/SID
(>56 км от KTA)
XTT
ATT
½W
1,85
1,48
6,48
STAR/IF/IAF /SID
(<56 км от KTA)
XTT
ATT ½ W
1,85
1,48
4,63
SID
(<28 км от KTA)
XTT
ATT
½W
1,85
1,48
3,70
Таблица 4.5. XTT, ATT и половина ширины зоны (½ W) для
Basic RNP-1 (для вертолетов) на этапе прибытия, начальном,
промежуточном участках захода на посадку и этапе вылета (км)
STAR/SID
STAR/IF/IAF /SID
SID
(>56 км от KTA)
(<56 км от KTA)
(<28 км от KTA)
XTT
ATT
1,85
1,48
½W
4,63
XTT
ATT
1,85
1,48
½W
4,07
XTT
ATT
1,85
1,48
½W
3,43
Таблица 4.6.ХТТ, АТТ и половина ширины (½ W) зоны для RNP АРСН
(для самолетов) на начальном, промежуточном, конечном участках захода
на посадку и этапе ухода на второй круг (км)
IF/IAF/уход на второй круг (<56 км от
КТА)
XTT АТТ ½ W
1,85
1,48
4,63
FAF
XTT
0,56
АТТ ½ W
0,44 2,69
MAPt
XTT АТТ
0,56 0,44
Уход на второй круг
(<28км от КТА)
½W
1,76
XTT
1,85
АТТ
1,48
½W
3,70
43
Таблица 4.7. ХТТ, АТТ и половина ширины зоны (½ W) для RNP АРСН
(для вертолетов) на начальном, промежуточном, конечном участках
захода на посадку и этапе ухода на второй круг (км)
IF/IAF/уход на второй круг (<56 км от
КТА)
XTT АТТ ½ W
1,85
1,48
4,07
FAF
XTT
0,56
АТТ ½ W
0,44 2,13
MAPt
XTT
0,56
АТТ
0,44
Уход на второй круг
(<28км от КТА)
½W
1,48
XTT
1,85
АТТ
1,48
½W
3,43
Таблица 4.8. ХТТ, АТТ и половина ширины зоны (½ W) для RNAV 1 и RNAV 2
на маршруте, при прибытии, на начальном и промежуточном участках
захода на посадку и этапе вылета (км)
Маршрут/STAR/SID
(>56 км от KTA)
XTT
ATT
½W
3,70
2,96
9,26
STAR/IF/IAF/SID
(<56 км от KTA)
XTT
ATT
½W
1,85
1,48
4,63
SID
(<28 км от KTA)
XTT
ATT
½W
1,85
1,48
3,70
Таблица 4.9. ХТТ, АТТ и половина ширины зоны (½ W) для RNAV 5
на этапе полета по маршруту (км)
Маршрут/STAR/SID (>56км от КТА)
ХТТ
АТТ
½W
4,65
3,72
10,68
44
5 RNAV НА ОСНОВЕ DME/DME
5.1 ОБЩИЕ ПОЛОЖЕНИЯ
5.1.1 В данном разделе изложены критерии определения XTT, ATT и половины
ширины зоны учета препятствий для схем RNAV на основе DME/DME в следующих
навигационных применениях:
RNAV 5;
RNAV 2;
RNAV 1.
RNAV 1 и RNAV 2 применяются к полетам по континентальному маршруту и в
районе аэродрома, включая SID, STAR и начальные участки захода на посадку вплоть
до конечного участка захода на посадку/этапа ухода на второй круг, но исключая эти
этапы. RNAV 5 применяется к полетам только по континентальному маршруту.
5.1.2 Опорные средства. Поскольку не представляется возможным узнать, какие
станции DME будет использовать бортовая система для коррекции местоположения,
следует провести проверку, для того чтобы убедиться в наличии соответствующей зоны действия DME на протяжении всего предлагаемого маршрута, основанного на использовании, по крайней мере, двух выбранных станций (зона действия станций DME
показана на рис. 5.1). Эта проверка должна включать:
опубликованную максимальную дальность действия оборудования DME с учетом теоретического максимального радиогоризонта станции (максимум 300 км);
максимальный и минимальный угол пересечения направлений на станции DME
(между 30 и 150°);
расположение DME от задаваемой линии пути (станции DME, находящиеся в
пределах 5,6 км от линии пути, не могут использоваться для навигации);
опубликованные ограничения в обозначенной рабочей зоне действия (если такая информация имеется).
5.1.3 Координаты станций DME и превышение DME должны публиковаться.
45
5.1.4 Погрешность наземного оборудования не должна превышать 185 м в течение 95% времени.
5.2 ТОЧНОСТЬ ИСПОЛЬЗОВАНИЯ СИСТЕМЫ RNAV НА ОСНОВЕ DME/DME
Точность использования системы (DTT) бортового приемного оборудования для
использования RNAV 1 и RNAV 2 определяется следующим образом:
2σ = 2 ((σ2 1,air + σ2 1,sis) + (σ2 2,air + σ2 2,sis))½ / Sin α,
где σsis = 0,0926 км;
σаir = МАХ{0,157 км или 0,125 % от расстояния (как определено в RTCA
DO-189 и TSO-C66c)};
30 ≤ α ≤150.
Значения АТТ, ХТТ и ½ W рассчитываются для α=90°, если в схеме используется более двух станций DME (т. е. показания, по крайней мере, двух DME имеются в
любой точке линии пути). В других случаях используется значение α = 30°.
Примечание. Теоретический максимальный радиогоризонт в км составляет
4,11(h)1/2 , где h – абсолютная высота воздушного судна.
Для использования RNAV 5: DTT = 0,463 + 0,0125×4,11× (4500)½ = 3,91км.
5.3 ДОПУСК НА ТЕХНИКУ ПИЛОТИРОВАНИЯ (FTЕ)
Применяются значения FTE, представленные в таблице 3.1.
5.4 ДОПУСК НА ВЫЧИСЛЕНИЯ В СИСТЕМЕ
Допуск на вычисления в системе (ST) составляет ±463 м.
5.5 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ
5.5.1 ХТТ и АТТ. Получение поперечного и продольного допусков в любой контрольной точке, определяемой точкой пути, производится путем объединения допусков, указанных в п.п. 5.2 – 5.4, на основе вычисления квадратного корня из суммы
квадратов.
Поперечный допуск от линии пути (ХТТ) в любой контрольной точке определяется как:
XTT = ± (DTT2 + FTЕ2 + ST2)½
46
Продольный допуск от линии пути (АТТ) в любой контрольной точке определяется как: ATT = ± (DTT2 + ST2)½.
Рис. 5.1. Максимальная зона коррекции по двум станциям DME А и В
47
5.5.2 Половина ширины зоны. Половина ширины зоны учета препятствий (½ W)
в точке пути определяется следующим уравнением:
½ W = ХТТ × 1,5 + BV
Значения буфера BV приведены в таблице 3.2.
Результаты расчетов АТТ, ХТТ и половины ширины зоны учета препятствий
для различных навигационных спецификаций приведены в таблицах 5.1 – 5.4.
Таблица 5.1. XTT, ATT и половина ширины (½ W) зоны для DME RNAV
(RNAV 1) на маршруте, при прибытии, на начальном/промежуточном участках
захода на посадку и на этапе вылета (км). Таблица основана на использовании
двух корректирующих станций DME
Абсолютная
высота
(м)
4500
4200
3900
3600
3300
3000
2700
2400
2100
1800
1500
1200
300–900
Маршрут/STAR/SID
(>56 км от КТА)
XTT
ATT
STAR/IAF/IF/SID
(<56 км от КТА)
SID
(<28 км от КТА)
½W
XTT
ATT
½W
XTT
ATT
½W
Для всех
абсолютных высот
2,29
2,09
7,14
2,29
2,23
2,17
2,11
2,05
1,99
1,92
1,85
1,78
1,70
1,63
1,54
1,46
2,09
2,03
1,97
1,90
1,83
1,76
1,68
1,60
1,52
1,43
1,34
1,24
1,13
5,29
5,20
5,11
5,02
4,93
4,83
4,73
4,63
4,52
4,41
4,29
4,17
4,05
2,29
2,23
2,17
2,11
2,05
1,99
1,92
1,85
1,78
1,70
1,63
1,54
1,46
2,09
2,03
1,97
1,90
1,83
1,76
1,68
1,60
1,52
1,43
1,34
1,24
1,13
4,36
4,27
4,18
4,09
4,00
3,90
3,80
3,70
3,59
3,48
3,36
3,24
3,12
48
Таблица 5.2. XTT, ATT и половина ширины зоны (½ W) для DME RNAV
(RNAV 1) на маршруте, при прибытии, на начальном/промежуточном участках
захода на посадку и на этапе вылета (км). Таблица основана на
использовании более двух корректирующих станций DME
Абсолютная
Высота
(м)
4500
4200
3900
3600
3300
3000
2700
2400
2100
1800
1500
1200
300–900
Маршрут/STAR/SID
(>56 км от КТА)
XTT
ATT
STAR/IAF/IF/SID
(<56 км от КТА)
SID
(<28 км от КТА)
½W
XTT
ATT
½W
XTT
ATT
½W
Для всех абсолютных высот
1,45
1,12
5,88
1,45
1,43
1,41
1,39
1,36
1,34
1,31
1,29
1,26
1,24
1,21
1,18
1,16
1,12
1,09
1,06
1,03
1,00
0,97
0,93
0,90
0,36
0,32
0,73
0,74
0,69
4,03
4,00
3,96
3,93
3,89
3,86
3,82
3,78
3,75
3,71
3,67
3,63
3,59
1,45
1,43
1,41
1,39
1,36
1,34
1,31
1,29
1,26
1,24
1,21
1,18
1,16
1,12
1,09
1,06
1,03
1,00
0,97
0,93
0,90
0,86
0,82
0,78
0,74
0,69
3,11
3,07
3,04
3,00
2,97
2,93
2,90
2,36
2,82
2,78
2,74
2,70
2,66
Таблица 5.3. XTT, ATT и половина ширины зоны (½ W) для DME RNAV
(RNAV 2) на маршруте, при прибытии, на начальном/промежуточном
участках захода на посадку и на этапе вылета (км). Таблица основана на
использовании двух корректирующих станций DME
Абсолют-ная
Высота
(м)
4500
4200
3900
3600
3300
3000
2700
2400
2100
1800
1500
1200
300–900
Маршрут/STAR/SID
(>56 км от КТА)
XTT
ATT
½W
Для всех абсолютных
высот
2,79
2,09
7,90
STAR/IAF/IF/SID
(<56 км от КТА)
SID
(<28 км от КТА)
XTT
ATT
½W
XTT
ATT
½W
2,79
2,75
2,70
2,65
2,60
2,55
2,50
2,45
2,39
2,34
2,28
2,23
2,17
2,09
2,03
1,97
1,90
1,83
1,76
1,68
1,60
1,52
1,43
1,34
124
1,13
6,04
5,97
5,90
5,83
5,76
5,68
5,60
5,52
5,44
5,36
5,28
5,19
5,11
2,79
2,75
2,70
2,65
2,60
2,55
2,50
2,45
2,39
2,34
2,28
2,23
2,17
2,09
2,03
1,97
1,90
1,83
1,76
1,68
1,60
1,52
1,43
1,34
1,24
1,13
5,12
5,05
4,98
4,90
4,83
4,75
4,68
4,60
4,52
4,44
4,35
4,27
4,18
49
Таблица 5.4. XTT, ATT и половина ширины (½ W) зоны для DME RNAV
(RNAV 5) на этапе полета по маршруту (км).
Таблица основана на использовании двух корректирующих станций DME
XTT
6,11
Маршрут/STAR/SID
(>56 км от КТА)
ATT
3,98
½W
12,86
Примечания:
1. Применяемая при расчетах абсолютная высота представляет собой минимальную абсолютную высоту (округленную до следующего более высокого значения)
предыдущего участка схемы в случае прибытия/захода на посадку. В случае абсолютной высоты разворота для схемы вылета предполагается, что градиент набора высоты
составляет 3,3% или равен наименьшему заданному градиенту набора высоты, если он
превышает 3,3%. В особых случаях, например, для высоко расположенных аэродромов, вместо абсолютной высоты используется расчетная относительная высота воздушного судна. В этом случае относительная высота должна быть привязана к самой
низко расположенной станции DME, находящейся в пределах максимальной дальности
приема сигналов DME.
50
6 RNAV НА ОСНОВЕ VOR/DME
6.1 ОБЩИЕ ПОЛОЖЕНИЯ
6.1.1 В данном разделе изложены критерии определения XTT, ATT и половины
ширины зоны (½ W) учета препятствий для схем RNAV на основе VOR/DME в навигационных применениях RNAV 5, которые применимы только к схемам полета по маршруту.
6.1.2 Опорное средство VОR/DME должно иметь зону действия в пределах 110
км (140 км для доплеровского VOR) и обеспечивать оптимальную геометрию для наведения по линии пути в каждой точке пути, с тем чтобы рассчитать XTT, ATT и ширину
зоны учета препятствий.
Координаты станций VOR/DME и превышение DME должны публиковаться.
6.2 ТОЧНОСТЬ ИСПОЛЬЗОВАНИЯ СИСТЕМЫ RNAV НА ОСНОВЕ
VOR/DME
6.2.1 Точность. Эксплуатационные характеристики оборудования зональной
навигации таковы, что допуски, определяющие эксплуатационную точность системы,
остаются в пределах значений, указанных далее в п.п. 6.2.2 – 6.2.3. Эти значения соответствуют доверительным пределам 2σ (95%).
6.2.2 Факторы, определяющие навигационную точность. К факторам, от которых зависит навигационная точность RNAV на основе VOR/DME, относятся:
допуск на наземную станцию;
допуск на бортовую приемную систему;
допуск на технику пилотирования;
допуск на вычисления в системе;
расстояние от опорного средства.
6.2.3 Точность использования системы
6.2.3.1 Точность использования системы VOR равна точности использования
системы VOR, составляющей ±4,5º для оборудования, не задающего линию пути.
51
6.2.3.2 Точность использования системы DME равна точности использования
системы DME (DТТ), составляющей ± (0,46 км + 1,25% от расстояния до антенны), для
оборудования, не задающего линию пути.
6.3 ДОПУСК НА ТЕХНИКУ ПИЛОТИРОВАНИЯ (FTЕ)
Применяются стандартные значения FTE, приведенные в таблице 3.1.
6.4 ДОПУСК НА ВЫЧИСЛЕНИЯ В СИСТЕМЕ (ST)
Допуск на вычисления в системе (ST) составляет ± 0,463 км.
6.5 ХТТ, АТТ И ПОЛОВИНА ШИРИНЫ ЗОНЫ
6.5.1 Поперечный (ХТТ) и продольный (АТТ) допуски на контрольные точки (см.
рис. 6.1 – 6.2).Поперечный допуск от линии пути (ХТТ) в любой контрольной точке
определяется как:
XTT = ± [VT2 + DT2 + FTT2 + ST2]1/2
Продольный допуск от линии пути (АТТ) в любой контрольной точке определяется как:
ATT = ± [AVT2 + ADT2 + ST2]1/2,
где D – расстояние от опорного средства до точки пути. Рассчитывается по
формуле:
D = [D12 + D22]1/2
D1 – расстояние от тангенциальной точки до опорного средства. Тангенциальная точка представляет собой перпендикулярную проекцию опорного средства на
номинальную линию пути.
D2 – расстояние от точки пути до тангенциальной точки;
α – точность использования VOR (4.50);
DTT – точность использования DME ± (0,46 км + 1,25% от расстояния до
антенны);
θ = arc tg (D2/D1) (градусы) (если D1 = 0, θ = 90º);
VT = D1 – D × cos (θ + α);
52
DT = DTT × cos θ;
AVT = D2 – D × sin (θ – α);
ADT = DTT × sin θ.
Примечание. АТТ не содержит FTT.
Рис. 6.1. Обозначение точек пути
53
Рис. 6.2. Вычисление допусков на точки пути
6.5.2. Половина ширины зоны учета препятствий.
Половина ширины зоны (½ W) в точке пути рассчитывается по формуле:
(1,5 × ХТТ + BV),
где BV – величина буфера (значения буфера указаны в таблице 3.2).
6.5.3. Результаты вычислений ХТТ, АТТ и половины ширины зоны приведены в
таблице 6.1.
6.5.4 АТТ и ХТТ зависят от расположения вдоль линии пути. Поэтому когда в
контрольной точке указан разворот, АТТ и ХТТ до и после разворота различны в силу
конфигурации отдельных контрольных точек.
54
Таблица 6.1. XTT, ATT и половина ширины зоны (½ W) для RNAV на основе
VOR/DME на этапе полетов по маршруту (RNAV 5) (км)
D1 (км)
0
20
40
60
80
100
120
D2 (км)
XTT
ATT
½A/W
XTT
ATT
½A/W
XTT
ATT
½A/W
XTT
ATT
½A/W
XTT
ATT
½A/W
XTT
ATT
½A/W
XTT
ATT
½ A/W
0
4,7
0,7
10,7
4,7
1,6
10,8
4,8
3,2
10,8
4,8
4,7
10,9
4,9
6,3
11,0
5,0
7,9
11,2
5,1
9,4
11,3
20
4,9
0,9
11,1
5,0
1,8
11,2
5,0
3,3
11,3
5,1
4,8
11,4
5,2
6,4
11,5
5,3
7,9
11,7
5,4
9,5
11,8
40
5,6
1,1
12,1
5,7
2,0
12,2
5,8
3,4
12,3
5,8
4,9
12,5
5,9
6,4
12,6
6,0
8,0
12,8
6,2
9,6
12,9
60
6,6
1,3
13,6
6,7
2,2
13,8
6,8
3,5
13,9
6,9
5,0
14,0
7,0
6,5
14,1
7,1
8,1
14,3
7,2
9,6
14,5
80
7,8
1,6
15,4
7,9
2,4
15,6
8,0
3,7
15,7
8,1
5,1
15,8
8,2
6,6
15,9
8,3
8,2
16,1
8,4
9,7
16,2
100
9,1
1,8
17,4
9,3
2,6
17,6
9,3
3,8
17,7
9,4
5,3
17,8
9,5
6,8
17,9
9,6
8,3
18,0
9,7
9,8
18,2
120
10,5
2,1
19,5
10,7
2,8
19,7
10,7
4,0
19,8
10,8
5,4
19,9
10,9
6,9
20,0
10,9
8,4
20,1
11,0
9,9
20,3
55
7 МИНИМАЛЬНАЯ ДЛИНА УЧАСТКА, ОГРАНИЧЕННОГО ДВУМЯ ТОЧКАМИ ПУТИ РАЗВОРОТА
В схемах с применением RNAV начало и конец каждого этапа (участка) обозначается точками пути. Для исключения ситуации, когда точки пути располагаются настолько близко друг к другу, что система RNAV вынуждена обходить их, необходимо
учитывать минимальное расстояние между последовательно расположенными точками
пути разворота. Применяются точки пути двух типов:
- точка пути «флай-бай»;
- точка пути «флайовер».
Применительно к участку, ограниченному двумя точками пути, возможны следующие четыре варианта последовательности:
- две точки пути «флай-бай»;
- точка пути «флай-бай», а затем точка пути «флайовер»;
- две точки пути «флайовер»;
- точка пути «флайовер», а затем точка пути «флай-бай».
Дополнительно также рассматривается случай участка «начало схемы вылета
(DER) – первая точка пути».
Для каждой точки пути определяется минимальное расстояние стабилизации –
расстояние между точкой пути и точкой, в которой траектория полёта переходит по касательной в номинальную траекторию (рис. 7.1). Для последовательно расположенных
точек пути минимальное расстояние между ними представляет собой сумму обоих минимальных расстояний стабилизации (рис. 7.2 – 7.5).
56
Рис. 7.1. Определение минимального расстояния стабилизации
Рис. 7.2. Две точки пути «флай-бай»
57
Рис. 7.3. Точка пути «флай-бай», затем точка пути «флайовер»
Рис. 7.4. Две точки пути «флайовер»
58
Рис. 7.5. Точка пути «флайовер», затем точка пути «флай-бай»
Минимальные расстояния стабилизации для различных значений истинной воздушной скорости, угла крена и изменения курса (в точке пути) представлены в таблицах 7.1 – 7.6 для самолетов и в таблицах 7.7 – 7.10 для вертолетов.
При разработке схем следует использовать скорости, соответствующие наибольшим значениям скоростей, приведённых в таблице 2.2. Для схем вылета следует
использовать табличное значение скорости для «конечного этапа ухода на второй
круг», для соответствующей категории воздушных судов, увеличенное на 10%, с целью
учета большей массы воздушного судна при вылете. Могут использоваться уменьшенные значения скоростей, но не меньше увеличенных в 1,1 раза табличных значений для
промежуточного этапа ухода на второй круг, при условии, что схема сопровождается
примечанием «Разворот при вылете ограничен максимальной IAS ______ км/ч».
При разработке схем следует использовать следующие значения углов крена:
на этапах захода на посадку – 250;
на этапе ухода на второй круг – 150;
на этапе вылета – 150.
59
Для установления средней траектории вылета применяются следующие значения угла крена:
- 150, если первый разворот производится на высоте менее 305 м;
- 200, если первый разворот производится на высоте более 305 м, но менее 915
м;
- 250, если первый разворот производится на высоте более 915 м.
Для вертолетов используются углы крена 150 и 200.
На участке DER (начало схемы вылета) – первая точка пути (рис.7.6) местоположение первой точки пути должно обеспечивать минимальное расстояние 3,5 км между DER и самой ранней точкой первого разворота. Может использоваться и меньшее
расстояние, если градиент набора высоты будет превышать значение 3,3% (рис. 7.6).
При этом точка разворота должна располагаться не ближе к DER, чем расстояние необходимое для достижения относительной высоты 120 м для данного повышенного
градиента набора высоты.
Рис. 7.6. Минимальное расстояние стабилизации: DER – первая точка пути.
60
Таблица 7.1. Минимальное расстояние стабилизации при развороте
в точке пути «флай-бай» (км)
Угол крена при развороте 15 градусов
ИзменеИстинная воздушная скорость (км/час)
ние кур<
260 280 300 320 340 360 380 400 440 480 520
са (граили
дусы)
560
600
640
3,3 3,8 4,4 5,1
3,6 4,2 4,9 5,6
3,9 4,6 5,3 6,1
4,2 5,0 5,8 6,6
4,6 5,4 6,3 7,2
5,0 5,9 6,8 7,8
5,4 6,3 7,4 8,5
5,8 6,9 8,0 9,2
6,3 7,4 8,7 10,0
6,8 8,1 9,4 10,8
7,4 8,7 10,2 11,8
8,0 9,5 11,1 12,8
8,7 10,3 12,1 13,9
9,5 11,3 13,2 15,2
10,5 12,4 14,5 16,7
5,8
6,3
6,9
7,6
8,2
8,9
9,7
10,5
11,4
12,4
13,4
14,6
15,9
17,4
19,1
6,5
7,2
7,8
8,6
9,3
10,1
11,0
11,9
12,9
14,0
15,2
16,6
18,1
19,8
21,7
240
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
1,1
1,2
1,3
1,4
1,5
1,6
1,8
1,9
2,0
2,2
2,3
2,5
2,7
3,0
3,3
1,3
1,4
1,5
1,6
1,8
1,9
2,0
2,2
2,3
2,5
2,7
2,9
3,2
3,5
3,8
1,5
1,6
1,7
1,9
2,0
2,2
2,3
2,5
2,7
2,9
3,1
3,4
3,7
4,0
4,4
1,6
1,8
1,9
2,1
2,3
2,4
2,6
2,8
3,1
3,3
3,6
3,9
4,2
4,6
5,0
1,8
2,0
2,2
2,4
2,5
2,8
3,0
3,2
3,5
3,7
4,0
4,4
4,7
5,2
5,7
2,1
2,2
2,4
2,6
2,8
3,1
3,3
3,6
3,9
4,2
4,5
4,9
5,3
5,8
6,4
2,3
2,5
2,7
2,9
3,2
3,4
3,7
4,0
4,3
4,7
5,0
5,5
5,9
6,5
7,1
2,5
2,7
3,0
3,2
3,5
3,8
4,1
4,4
4,8
5,2
5,6
6,1
6,6
7,2
7,9
2,7
3,0
3,3
3,5
3,8
4,2
4,5
4,9
5,3
5,7
6,2
6,7
7,3
7,9
8,7
Примечание: Используется значение 50 градусов, если курс изменяется меньше,
чем на 50 градусов.
61
Таблица 7.2. Минимальное расстояние стабилизации при развороте
в точке пути «флай-бай» (км)
Угол крена при развороте 20 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение
курса
(градусы)
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
< 260 280 300 320 340 360 380 400 440 480 520 560 600 640
или
240
0,9 1,0 1,2 1,3 1,5 1,6 1,8 2,0 2,2 2,6 3,0 3,4 3,9 4,5 5,0
1,0 1,1 1,3 1,4 1,6 1,8 2,0 2,2 2,4 2,8 3,3 3,8 4,3 4,9 5,5
1,1 1,2 1,4 1,5 1,7 1,9 2,1 2,3 2,6 3,0 3,5 4,1 4,7 5,3 6,0
1,1 1,3 1,5 1,7 1,9 2,1 2,3 2,5 2,8 3,3 3,8 4,4 5,1 5,8 6,5
1,2 1,4 1,6 1,8 2,0 2,2 2,5 2,7 3,0 3,5 4,2 4,8 5,5 6,3 7,1
1,3 1,5 1,7 1,9 2,1 2,4 2,6 2,9 3,2 3,8 4,5 5,2 6,0 6,8 7,7
1,4 1,6 1,8 2,0 2,3 2,6 2,9 3,1 3,5 4,1 4,8 5,6 6,5 7,4 8,3
1,5 1,7 1,9 2,2 2,5 2,8 3,1 3,4 3,7 4,4 5,2 6,1 7,0 8,0 9,0
1,6 1,8 2,1 2,4 2,7 3,0 3,3 3,6 4,0 4,8 5,6 6,6 7,6 8,6 9,7
1,7 2,0 2,2 2,5 2,9 3,2 3,6 3,9 4,3 5,2 6,1 7,1 8,2 9,3 10,6
1,9 2,1 2,4 2,7 3,1 3,5 3,8 4,2 4,7 5,6 6,6 7,7 8,9 10,1 11,4
2,0 2,3 2,6 3,0 3,3 3,7 4,2 4,6 5,1 6,1 7,2 8,3 9,6 11,0 12,4
2,2 2,4 2,8 3,2 3,6 4,0 4,5 5,0 5,5 6,6 7,8 9,1 10,5 11,9 13,5
2,3 2,7 3,0 3,5 3,9 4,4 4,9 5,4 6,0 7,2 8,5 9,9 11,4 13,0 14,8
2,5 2,9 3,3 3,8 4,3 4,8 5,4 5,9 6,5 7,9 9,3 10,8 12,5 14,3 16,2
Примечание: Используется значение 50 градусов, если курс изменяется меньше
чем на 50 градусов.
62
Таблица 7.3. Минимальное расстояние стабилизации при развороте
в точке пути «флай-бай» (км)
Угол крена при развороте 25 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение курса
(градусы)
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
<
260 280 300 320 340 360 380 400 440 480 520 560 600 640
или
240
0,9 1,0 1,1 1,2 1,3 1,4 1,5 1,7 1,8 2,1 2,5 2,8 3,2 3,7 4,1
1,0 1,1 1,2 1,2 1,3 1,5 1,6 1,8 2,0 2,3 2,7 3,1 3,5 4,0 4,5
1,1 1,2 1,2 1,3 1,4 1,6 1,8 1,9 2,1 2,5 2,9 3,4 3,8 4,3 4,9
1,1 1,2 1,3 1,4 1,5 1,7 1,9 2,1 2,3 2,7 3,1 3,6 4,1 4,7 5,3
1,2 1,3 1,4 1,5 1,7 1,8 2,0 2,2 2,4 2,9 3,4 3,9 4,5 5,1 5,7
1,3 1,4 1,5 1,6 1,8 2,0 2,2 2,4 2,6 3,1 3,6 4,2 4,8 5,5 6,2
1,4 1,5 1,6 1,8 1,9 2,1 2,3 2,6 2,8 3,4 3,9 4,6 5,2 5,9 6,7
1,5 1,6 1,8 1,9 2,0 2,3 2,5 2,8 3,0 3,6 4,2 4,9 5,6 6,4 7,2
1,6 1,7 1,9 2,0 2,2 2,4 2,7 3,0 3,3 3,9 4,6 5,3 6,1 6,9 7,8
1,7 1,9 2,0 2,2 2,3 2,6 2,9 3,2 3,5 4,2 4,9 5,7 6,6 7,5 8,4
1,9 2,0 2,2 2,3 2,5 2,8 3,1 3,4 3,8 4,5 5,3 6,2 7,1 8,1 9,1
2,0 2,2 2,3 2,5 2,7 3,0 3,3 3,7 4,1 4,9 5,7 6,7 7,7 8,7 9,9
2,2 2,3 2,5 2,7 2,9 3,3 3,6 4,0 4,4 5,3 6,2 7,2 8,3 9,5 10,8
2,3 2,5 2,7 2,9 3,2 3,5 3,9 4,4 4,8 5,7 6,8 7,9 9,1 10,4 11,7
2,5 2,7 3,0 3,2 3,4 3,9 4,3 4,7 5,2 6,3 7,4 8,6 9,9 11,4 12,9
Примечание: Используется значение 50 градусов, если курс изменяется меньше
чем на 50 градусов.
63
Таблица 7.4. Минимальное расстояние стабилизации при развороте
в точке пути «флайовер» (км).
Угол крена при развороте 15 градусов
Изменение
курса
(градусы)
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
<
260 280
или
240
3,9 4,5 5,2
4,2 4,9 5,6
4,5 5,2 6,0
4,8 5,6 6,4
5,1 5,9 6,8
5,4 6,3 7,2
5,7 6,6 7,6
5,9 6,9 7,9
6,2 7,2 8,3
6,4 7,5 8,6
6,7 7,8 9,0
6,9 8,0 9,3
7,1 8,3 9,5
7,3 8,5 9,8
7,4 8,7 10,0
300
320
340
360
380
400
440
480
520
560
600
640
5,9
6,4
6,8
7,3
7,7
8,2
8,6
9,1
9,5
9,9
10,2
10,6
10,9
11,2
11,4
6,7
7,2
7,7
8,2
8,8
9,3
9,8
10,2
10,7
11,2
11,6
12,0
12,3
12,6
12,9
7,5
8,0
8,6
9,2
9,8
10,4
11,0
11,5
12,0
12,5
13,0
13,4
13,8
14,2
14,5
8,3
9,0
9,6
10,3
11,0
11,6
12,2
12,8
13,4
14,0
14,5
15,0
15,5
15,9
16,2
9,2
9,9
10,7
11,4
12,1
12,9
13,6
14,3
14,9
15,5
16,1
16,7
17,2
17,6
18,0
10,1
10,9
11,8
12,6
13,4
14,2
15,0
15,7
16,5
17,2
17,8
18,4
19,0
19,5
19,9
12,1
13,1
14,1
15,1
16,1
17,1
18,0
18,9
19,8
20,6
21,4
22,2
22,8
23,4
24,0
14,3
15,5
16,7
17,9
19,0
20,2
21,3
22,4
23,4
24,4
25,4
26,2
27,0
27,8
28,4
16,7
18,1
19,4
20,8
22,2
23,6
24,9
26,2
27,4
28,6
29,7
30,7
31,6
32,5
33,2
19,2
20,8
22,4
24,0
25,6
27,2
28,7
30,2
31,6
33,0
34,3
35,5
36,6
37,5
38,4
22,2
23,8
25,6
27,5
29,3
31,1
32,9
34,6
36,2
37,8
39,2
40,6
41,8
43,0
44,0
24,9
27,0
29,1
31,1
33,2
35,3
37,3
39,2
41,1
42,9
44,5
46,1
47,5
48,8
49,9
Примечание: Используется значение 50 градусов, если курс изменяется меньше,
чем на 50 градусов.
64
Таблица 7.5. Минимальное расстояние стабилизации при развороте
в точке пути «флайовер» (км).
Угол крена при развороте 20 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение
курса
(градусы)
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
< 260 280 300 320
или
240
3,2 3,7 4,2 4,8 5,4
3,4 3,9 4,5 5,1 5,7
3,7 4,2 4,8 5,4 6,1
3,9 4,4 5,1 6,8 6,5
4,1 4,7 5,4 6,1 6,9
4,3 4,9 5,7 6,4 7,3
4,5 5,2 5,9 6,8 7,6
4,7 5,4 6,2 7,1 8,0
4,9 5,6 6,5 7,4 8,3
5,1 5,9 6,7 7,7 8,7
5,3 6,1 7,0 7,9 9,0
5,5 6,2 7,2 8,2 9,3
5,6 6,4 7,4 8,4 9,5
5,8 6,6 7,6 8,6 9,7
5,9 6,7 7,7 8,8 10,0
340
360
380
400
440
480
520
560
600
640
6,0
6,4
6,9
7,3
7,7
8,1
8,6
9,0
9,4
9,7
10,1
10,4
10,7
10,9
11,2
6,6
7,1
7,6
8,1
8,6
9,1
9,5
10,0
10,4
10,8
11,2
11,6
11,9
12,2
12,5
7,3
7,9
8,4
9,0
9,5
10,0
10,6
11,1
11,6
12,0
12,4
12,9
13,2
13,6
13,8
8,1
8,7
9,3
9,9
10,5
11,1
11,7
12,2
12,7
13,3
13,7
14,2
14,6
15,0
15,3
9,7
10,4
11,1
11,8
12,6
13,3
14,0
14,7
15,3
15,9
16,5
17,0
17,5
18,0
18,4
11,4
12,2
13,1
14,0
14,8
15,7
16,5
17,3
18,1
18,8
19,5
20,2
20,7
21,3
21,7
13,2
14,2
15,3
16,3
17,3
18,3
19,3
20,2
21,1
22,0
22,8
23,5
24,2
24,8
25,4
15,2
16,4
17,6
18,8
19,9
21,1
22,2
23,3
24,4
25,4
26,3
27,2
28,0
28,7
29,3
17,4
18,7
20,1
21,4
22,8
24,1
25,4
26,6
27,8
29,0
30,1
31,1
32,0
32,8
33,5
19,6
21,2
22,7
24,2
25,8
27,3
28,8
30,2
31,6
32,9
34,1
35,2
36,3
37,2
38,1
Примечание: Используется значение 50 градусов, если курс изменяется меньше,
чем на 50 градусов.
65
Таблица 7.6. Минимальное расстояние стабилизации при развороте
в точке пути «флайовер» (км).
Угол крена при развороте 25 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение
курса
(градусы)
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
<
260 280 300 320 340 360 380
или
240
3.2 3,5 3,8 4,2 4,5 5,1 5,6 6,2
3.4 3,8 4,1 4,4 4,8 5,4 6,0 6,6
3.7 4,0 4,4 4,7 5,1 5,8 6,4 7,1
3.9 4,3 4,6 5,0 5,5 6,1 6,8 7,5
4.1 4,5 4,9 5,3 5,7 6,4 7,2 7,9
4.3 4,7 5,1 5,5 6,0 6,8 7,5 8,3
4.5 5,0 5,4 5,8 6,3 7,1 7,9 8,7
4.7 5,2 5,6 6,1 6,6 7,4 8,2 9,1
4.9 5,4 5,9 6,3 6,9 7,7 8,6 9,5
5.1 5,6 6,1 6,6 7,1 8,0 8,9 9,9
5.3 5,8 6,3 6,8 7,4 8,3 9,2 10,2
5.5 6,0 6,5 7,0 7,6 8,5 9,5 10,5
5.6 6,1 6,6 7,2 7,8 8,7 9,7 10,8
5.8 6,3 6,8 7,3 8,0 9,0 10,0 11,1
5.9 6,4 6,9 7,5 8,1 9,1 10,2 11,3
400
440
480
520
560
600
640
6,8
7,3
7,8
8,2
8,7
9,2
9,6
10,1
10,5
10,9
11,2
11,6
11,9
12,2
12,4
8,1
8,7
9,3
9,8
10,4
11,0
11,5
12,0
12,5
13,0
13,5
13,9
14,3
14,6
14,9
9,6
10,2
10,9
11,6
12,3
12,9
13,6
14,2
14,8
15,4
15,9
16,4
16,9
17,3
17,7
11,1
11,9
12,7
13,5
14,3
15,1
15,8
16,6
17,3
17,9
18,6
19,2
19,7
20,2
20,6
12,8
13,7
14,6
15,5
16,4
17,3
18,2
19,1
19,9
20,7
21,4
22,1
22,7
23,3
23,8
14,5
15,6
16,6
17,7
18,8
19,8
20,8
21,8
22,7
23,6
24,5
25,2
26,0
26,6
27,2
16,4
17,6
18,8
20,0
21,2
22,4
23,5
24,7
25,7
26,8
27,7
28,6
29,4
30,1
30,8
Примечание: Используется значение 50 градусов, если курс изменяется меньше,
чем на 50 градусов.
66
Таблица 7.7. Минимальное расстояние стабилизации при развороте
в точке пути «флай-бай» (км).
Угол крена при развороте 15 градусов
Изменение курса
(градусы)
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
≤130
150
170
190
210
230
240
0,29
0,33
0,36
0,39
0,43
0,47
0,51
0,55
0,59
0,64
0,69
0,74
0,80
0,86
0,93
1,01
1,09
1,19
1,30
0,34
0,38
0,41
0,45
0,50
0,54
0,58
0,63
0,68
0,74
0,79
0,85
0,92
0,99
1,07
1,16
1,26
1,37
1,50
0,38
0,43
0,47
0,52
0,56
0,61
0,66
0,72
0,77
0,83
0,90
0,97
1,04
1,13
1,22
1,32
1,43
1,56
1,70
0,44
0,49
0,54
0,60
0,65
0,71
0,77
0,83
0,90
0,97
1,05
1,13
1,22
1,32
1,42
1,54
1,67
1,82
1,99
0,52
0,58
0,65
0,71
0,78
0,85
0,92
1,00
1,08
1,17
1,26
1,36
1,47
1,59
1,72
1,86
2,02
2,21
2,42
0,61
0,68
0,76
0,84
0,92
1,00
1,09
1,18
1,28
1,38
1,50
1,62
1,74
1,89
2,04
2,22
2,41
2,63
2,88
0,65
0,73
0,82
0,90
0,99
1,08
1,18
1,28
1,38
1,50
1,62
1,75
1,89
2,05
2,22
2,40
2,62
2,85
3,13
Примечание: Используется значение 30 градусов, если курс изменяется меньше,
чем на 30 градусов.
67
Таблица 7.8. Минимальное расстояние стабилизации при развороте
в точке пути «флай-бай» (км).
Угол крена при развороте 20 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение курса
(градусы)
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
≤130
0,29
0,33
0,36
0,39
0,43
0,47
0,51
0,55
0,59
0,64
0,69
0,74
0,80
0,86
0,93
1,01
1,09
1,19
1,30
150
0,34
0,38
0,41
0,45
0,50
0,54
0,58
0,63
0,68
0,74
0,79
0,85
0,92
0,99
1,07
1,16
1,26
1,37
1,50
170
0,38
0,43
0,47
0,52
0,56
0,61
0,66
0,72
0,77
0,83
0,90
0,97
1,04
1,13
1,22
1,32
1,43
1,56
1,70
190
0,43
0,48
0,53
0,58
0,63
0,68
0,74
0,80
0,86
0,93
1,00
1,08
1,17
1,26
1,36
1,47
1,60
1,74
1,90
210
0,47
0,53
0,58
0,64
0,69
0,75
0,82
0,88
0,96
1,03
1,11
1,20
1,29
1,39
1,50
1,63
1,77
1,92
2,10
230
0,52
0,58
0,64
0,70
0,76
0,83
0,90
0,97
1,05
1,13
1,22
1,31
1,41
1,52
1,65
1,78
1,93
2,11
2,31
240
0,54
0,60
0,66
0,73
0,79
0,86
0,94
1,01
1,09
1,18
1,27
1,37
1,47
1,59
1,72
1,86
2,02
2,20
2,41
Примечание: Используется значение 30 градусов, если курс изменяется меньше,
чем на 30 градусов.
68
Таблица 7.9. Минимальное расстояние стабилизации при развороте
в точке пути «флайовер» (км).
Угол крена при развороте 15 градусов
Изменение курса
(градусы)
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
≤130
150
170
190
210
230
240
1,06
1,16
1,27
1,39
1,51
1,62
1,74
1,86
1,98
2,10
2,22
2,33
2,43
2,54
2,63
2,72
2,80
2,87
2,94
1,22
1,34
1,47
1,60
1,74
1,87
2,01
2,15
2,29
2,43
2,56
2,69
2,81
2,93
3,04
3,14
3,23
3,32
3,39
1,38
1,52
1,66
1,81
1,97
2,12
2,28
2,44
2,59
2,75
2,90
3,04
3,18
3,32
3,44
3,56
3,66
3,76
3,84
1,61
1,77
1,94
2,12
2,30
2,48
2,67
2,85
3,04
3,22
3,39
3,56
3,73
3,88
4,03
4,17
4,29
4,40
4,50
1,93
2,13
2,34
2,56
2,78
3,00
3,23
3,45
3,68
3,90
4,11
4,32
4,52
4,71
4,89
5,06
5,21
5,35
5,47
2,29
2,53
2,78
3,04
3,30
3,57
3,84
4,11
4,38
4,65
4,90
5,16
5,40
5,62
5,84
6,04
6,22
6,39
6,53
2,48
2,74
3,01
3,29
3,58
3,87
4,17
4,46
4,76
5,04
5,33
5,60
5,86
6,11
6,34
6,56
6,76
6,94
7,10
Примечание: Используется значение 30 градусов, если курс изменяется меньше,
чем на 30 градусов.
69
Таблица 7.10. Минимальное расстояние стабилизации при развороте
в точке пути «флайовер" (км).
Угол крена при развороте 20 градусов
(угловая скорость не более 3 градусов в секунду)
Изменение курса
(градусы)
30
35
40
45
50
55
60
65
70
75
80
85
90
95
100
105
110
115
120
Истинная воздушная скорость (км/час)
≤130
150
170
190
210
230
240
1,06
1,16
1,27
1,39
1,51
1,62
1,74
1,86
1,98
2,10
2,22
2,33
2,43
2,54
2,63
2,72
2,80
2,87
2,94
1,22
1,34
1,47
1,60
1,74
1,87
2,01
2,15
2,29
2,43
2,56
2,69
2,81
2,93
3,04
3,14
3,23
3,32
3,39
1,38
1,52
1,66
1,81
1,97
2,12
2,28
2,44
2,59
2,75
2,90
3,04
3,18
3,32
3,44
3,56
3,66
3,76
3,84
1,56
1,71
1,87
2,04
2,21
2,39
2,56
2,74
2,91
3,09
3,25
3,42
3,57
3,72
3,86
3,99
4,11
4,22
4,31
1,75
1,93
2,10
2,29
2,48
2,67
2,87
3,06
3,25
3,44
3,63
3,81
3,98
4,14
4,30
4,44
4,57
4,69
4,80
1,96
2,14
2,34
2,54
2,75
2,96
3,18
3,39
3,60
3,81
4,01
4,21
4,40
4,58
4,74
4,90
5,05
5,18
5,29
2,06
2,26
2,46
2,67
2,89
3,11
3,33
3,55
3,78
3,99
4,20
4,41
4,61
4,79
4,97
5,13
5,28
5,42
5,54
Примечание: Используется значение 30 градусов, если курс изменяется меньше,
чем на 30 градусов.
70
Для введения особых ограничений (изменение скорости, высоты полета) в пределах прямолинейного участка могут добавляться точки пути, не являющиеся точками
пути разворота. При этом минимальная длина участка RNAV, ограниченного с одной
стороны данной точкой в зависимости от этапа полета, должна быть не менее минимального расстояния D, представленного в таблице 7.11.
Таблица 7.11. Минимальная длина участка RNAV, ограниченного точкой пути,
не являющейся точкой пути разворота
Этап полета
Маршрут
более 56 км от КТА
Прибытие, начальный часток захода на посадку в пределах 56 км от КТА
Вылет в пределах 28 км от КТА и конечный
участок захода на посадку
Уход на второй круг и вылет в пределах 56 км
от КТА
D: минимальное расстояние
до точки пути *)
9,3 км
5,6 км
2,8 км
5,6 км
*) Если расстояние стабилизации превышает D, D равно расстоянию стабилизации.
71
8 ЗАЩИТА РАЗВОРОТА И ОЦЕНКА ПРЕПЯТСТВИЙ
8.1 ОБЩИЕ ПОЛОЖЕНИЯ
В данном разделе приводятся критерии, которые применяются для построения
зон защиты разворотов во всех схемах RNAV и RNP.
8.2 СКОРОСТЬ
При построении всех зон защиты разворотов RNAV и RNP следует учитывать
максимальную и минимальную скорости, определенные для соответствующего этапа
полета.
8.3 МЕТОДЫ ПОСТРОЕНИЯ РАЗВОРОТОВ
8.3.1 В зависимости от типа разворота, угла разворота и участка полета применяются различные методы построения защиты разворота.
8.3.2 Разворот в заданной точке (TP). Точка разворота может быть задана либо
точкой пути «флай-бай», либо точкой пути «флайовер». В зависимости от угла разворота и участка полета применяются два разных метода построения зоны защиты разворота:
1. Метод дуги окружности:
для разворотов в IAF, IF на 30° и менее;
для разворотов в FAF на 10° и менее.
Построение описывается в п. 8.5.
2. Метод спирали ветра:
для разворотов в IAF, IF более 30º;
для разворотов в FAF более 10º;
для разворотов на участках ухода на второй круг и вылета.
Построение описывается в п. 8.6.
В качестве альтернативы методу спирали ветра может использоваться упрощенный метод ограничивающих окружностей, который рассмотрен в Добавлении к настоящему разделу.
72
8.3.3 Разворот на абсолютной/относительной высоте (разворот TA/H). Для построения зоны защиты разворота на абсолютной/относительной высоте применяется
метод спирали ветра или метод ограничивающих окружностей.
8.3.4 Разворот с радиусом от контрольной точки (разворот RF). Развороты RF
применяются в схемах RNAV и RNP. Для построения зоны защиты разворота используется другой метод, построение которого описывается в п. 8.7.
8.4 ОПРЕДЕЛЕНИЕ САМОЙ РАННЕЙ И САМОЙ ПОЗДНЕЙ ТОЧЕК РАЗВОРОТА
8.4.1 Местоположение самой ранней и самой поздней точек разворота определяется в зависимости от типа точки пути/разворота, как указано в таблице 8.1.
Tаблица 8.1. Определение самой ранней и самой поздней точки разворота
Тип разворота
Критерии самой ранней и самой поздней точки разворота
Флайовер
(рис. 8.4, 8.7 и 8.8)
Ранняя: ATT до точки пути.
Поздняя: ATT + время реакции пилота + задержка угла крена.
Флай-бай
(рис. 8.3, 8.5 и 8.6)
Ранняя: ATT + расстояние начала разворота до точки пути. Поздняя:
Расстояние начала разворота – ATT – время реакции пилота (если значение отрицательное, точка находится за точкой пути).
Ранняя: 600 м от стартового конца ВПП (стартовый конец ВПП для
взлета/РДР).
Поздняя: Точка, в которой поверхность, начинающаяся на высоте 5 м
над DER, достигает требуемой абсолютной высоты с заданным PDG
+ время реакции пилота + задержка угла крена.
Вылет с разворотом
TA/H, после которого
следует участок СF
(рис. 8.9)
Вылет с разворотом
TA/H, после которого
следует участок DF
(рис. 8.10)
Ранняя: 600 м от стартового конца ВПП (стартовый конец ВПП для
взлета/РДР).
Поздняя: Точка, в которой поверхность, начинающаяся на высоте 5 м
над DER, достигает требуемой абсолютной высоты с заданным PDG +
время реакции пилота + задержка угла крена.
Уход на второй круг с Ранняя: ATT до MAPt (в обычном случае означает, что воздушное
разворотом TA/H (рис. судно не выполняет разворот до MAPt, даже если оно находится выше
8.11)
высоты, заданной для разворота. При этом на карте захода на посадку
требуется соответствующее примечание).
Поздняя: Точка, в которой поверхность, начинающаяся в точке SOC,
достигает требуемой высоты с градиентом набора высоты 2,5% (если
не указан другой градиент) + время реакции пилота + задержка угла
крена.
Разворот в MAPt
Ранняя: ATT до MAPt.
(рис. 8.12 и 8.13)
Поздняя: SOC + время реакции пилота + задержка угла крена.
73
8.4.2 Параметры разворота для определения самой ранней или самой поздней
точки разворота содержатся в таблице 8.2.
Таблица 8.2. Параметры для построения зон разворотов
Участок или Скорость
контрольная (IAS)
точка, определяющие
расположение разворота
Вылет
IAS конечного
этапа ухода на
второй круг +
10%
(Табл. 2.2) 1
Относительная/
абсолютная высота
Ветер
Угол крена
Разворот на абсолютной/ относительной высоте: указанная абсолютная/ относительная высота.
Разворот в точке
разворота: превышение аэродрома + относительная высота,
соответствующая
10% набора высоты
от DER
Ветер для
95% с любого направления или 56
км/ч
Для расчета зоны
разворота: 15°
Маршрут
Указанная абсолют- Ветер для
ная высота
вероятности
95% или
стандартный
ветер ИКАО3
585 км/час
Время Время
ввода в реакции
крен
пилота
(сек)
(сек)
3
3
15°
5
10
Для установления
средней траектории полета:
15о – до 305 м
20о – 305 м – 915
м
25о – выше 915 м
IAF, IF, FAF Для разворота в Указанная относиIAF и IF исполь- тельная высота
зуется скорость
начального участка захода на
посадку.
Для разворота в
FAF используется максимальная
скорость конечного участка захода на посадку.
(Табл. 2.2)
Ветер для
95% с любого направления или 56
км/ч
25º
5
6
Уход на
(Табл. 2.2)2
второй круг
56 км/ч
15º
3
3
Превышение аэродрома +300 м
74
Примечание 1. Там, где с эксплуатационной точки зрения необходим обход
препятствий, может использоваться снижение скоростей до увеличенных на 10% значений IAS, приведенных в таблице 2.2 для «промежуточного этапа ухода на второй
круг», при условии размещения на схеме примечания «Разворот при вылете ограничен
максимальной IAS ____ км/ч».
Примечание 2. Там, где с эксплуатационной точки зрения необходим обход
препятствий, может использоваться снижение скорости до величин IAS промежуточного этапа ухода на второй круг, при условии размещения на схеме примечания «Разворот при уходе на второй круг ограничен максимальной IAS км/ч».
Примечание 3. Стандартный ветер ИКАО = 12h + 87 км/час.
8.4.3 Дистанция начала разворота в точке «флай-бай» является специфической и
определяется следующим образом.
Для определения самой ранней точки разворота:
дистанция начала разворота = (r tg A/2).
Для определения самой поздней точки разворота:
дистанция начала разворота = Min {(r tg A/2); r},
где A – изменение угла линии пути;
r – радиус разворота.
8.5 МЕТОД ДУГИ ОКРУЖНОСТИ
8.5.1 Метод дуги окружности может быть использован только для построения
зоны защиты разворотов в точках IAF, IF и FAF, которые обычно заданы точками пути
«флай-бай». Однако, если в пределах начального участка захода на посадку используется разворот в точке пути «флайовер» на малый угол – этот метод построения также
может применяться.
8.5.2 Построение внешней и внутренней границ разворота проводится следующим образом.
Через точку разворота проводятся линии, перпендикулярные смежным участкам
маршрута, до пересечения с внешними и внутренними краями основной и дополни-
75
тельной зоны. Края основной и дополнительной зон смежных участков соединяются
через пограничные точки, образованные пересечением.
Внешние края основной и дополнительной зон участков соединяются дугами
окружностей. Центр дуги окружности определяется пересечением перпендикуляра, который делит пополам прямую линию между двумя пограничными точками и перпендикуляра к предыдущему участку, проведенному из точки разворота. Если ширина зон
смежных участков является одинаковой, центр дуги окружности будет совпадать с
точкой разворота. Внутренние края основной и дополнительной зон участков соединяются прямыми линиями через пограничные точки, образованные пересечением. Построение зоны представлено на рис. 8.1.
8.6 МЕТОД СПИРАЛИ ВЕТРА
Метод спирали ветра заключается в построении зоны, соответствующей радиусу разворота, рассчитанному для конкретного значения истинной скорости и угла крена.
Внешняя граница зоны разворота строится с использованием спирали, полученной с помощью радиуса разворота в штилевых условиях (r). Результирующая спираль
формируется добавлением влияния ветра Eθ за время изменения направления на θº по
формуле:
Eθ = (θ/R) × (w/3600), км
где θ – угол разворота (град.);
R – угловая скорость разворота (м/с);
w – скорость ветра (км/ч);
V – истинная скорость (TAS) (км/ч).
Спираль ветра основывается на расчете Eθ через установленный интервал (например, 30°). Точность может быть повышена за счет уменьшения интервала. Построение спирали ветра представлено на рис. 8.2 и осуществляется следующим образом:
1. Наносятся точки b1, c1, … n1 посредством добавления расстояния Eθ перпендикулярно радиусу в штилевых условиях (r).
76
2. Рассчитываются точки b2, c2, … n2, расположенные под углом arcsin (w/V)
перед b1, c1, … n1, и расстояние Eθ соответственно от точек b, c, …n.
3. Спираль получается путем проведения кривой от точки «a», расположенной
на радиусе в штилевых условиях, через точки b2, c2, … n2.
8.6.1 Защита внешней границы разворота.
Основная зона. Для внешней защиты используется граница спирали самого не-
благоприятного ветра. В зависимости от величины угла разворота может потребоваться
построение четырех спиралей ветра.
В зависимости от взаимного расположения защитных зон прямолинейных участков применяют следующие способы сопряжения основных зон:
- если основная зона, полученная с помощью спирали ветра, оказывается в пределах основной зоны следующего участка, эти зоны соединяются линией, проведенной
под углом 15° к номинальной линии пути следующего участка по касательной к спирали ветра (рис. 8.7, 8.8, 8.10, 8.11, 8.12 и 8.13). В случае использования участка DF за
номинальную линию пути принимают самую позднюю номинальную линию пути, которая проводится по касательной к спирали самого неблагоприятного ветра в точку пути следующего участка (рис. 8.7, 8.8, 8.10, 8.11 и 8.12);
- если полученная в результате основная зона оказывается за пределами основной зоны следующего участка, зоны соединяются линией, проведенной под углом 30° к
номинальной линии пути следующего участка по касательной к спирали ветра
(рис. 8.3, 8.4, 8.5, 8.6 и 8.9).
В зависимости от величины угла разворота в точках «флай-бай» используются
различные способы построения внешней границы основной зоны разворота:
- для разворотов на 90° или менее границы основной зоны строятся по касательной к спирали ветра, проведенной параллельно предыдущему и следующему участкам
(рис. 8.3 и 8.6);
- для разворотов более чем на 90° основная зона ограничивается касательной к
спирали ветра, проведенной параллельно предыдущему участку, и касательной к спи-
77
рали ветра, проведенной перпендикулярно к предыдущему участку (рис. 8.5).
Дополнительная зона. Дополнительная зона устанавливается для всех разворо-
тов при условии, что она имеется в точке разворота. Дополнительная зона имеет постоянную ширину во время разворота. Ширина дополнительной зоны определяется шириной дополнительной зоны в самой поздней точке разворота. Если граница дополнительной зоны, связанной с разворотом, остается в пределах соответствующей зоны защиты последующего участка, тогда эта граница отклоняется под углом 15° относительно номинальной линии пути, заданной после разворота.
Сужающаяся зона защиты. Если зона защиты сужается в направлении точки
пути, и самая поздняя точка разворота расположена после данной точки пути, зона защиты сохраняет значение ширины зоны в точке пути до достижения самой поздней
точки разворота (рис. 8.4).
8.6.2 Защита внутренней границы разворота.
В зависимости от взаимного расположения защитных зон прямолинейных участков применяют следующие способы сопряжения основных/дополнительных зон.
1. Если границы основной/дополнительной зоны предыдущего участка в самой
ранней точке разворота оказываются в пределах основной/дополнительной зоны следующего участка, зоны соединяются линией, проведенной от самой крайней точки
раннего разворота под углом 15° к номинальной линии пути следующего участка
(рис. 8.4, 8.7, 8.8, 8.10, 8.11, 8.12 и 8.13).
В случае использования участка DF за номинальную линию пути принимают
самую раннюю номинальную линию пути, которая проводится из самой ранней точки
разворота на внутренней стороне основной зоны в точку пути следующего участка
(рис. 8.7, 8.10, 8.11 и 8.12).
При этом, если угол, образованный самой ранней границей разворота и самой
ранней номинальной линией пути, становится больше 90о, самую раннюю номинальную линию пути строят с внешней стороны основной зоны (рис 8.8).
78
2. Если границы основной/дополнительной зоны предыдущего участка в самой
ранней точке разворота лежат за пределами основной/дополнительной зоны следующего участка, зоны соединяются линией, проведенной от самой крайней точки раннего
разворота под углом равным половине угла разворота (А/2) (рис. 8.3, 8.4, 8.5, 8.6 и 8.9).
8.7 МЕТОД РАЗВОРОТА RF
8.7.1 Общие положения. Разворот с радиусом от контрольной точки представляет собой траекторию, образованную дугой постоянного радиуса (рис. 8.14), которая
определяется:
тангенциальной точкой в конце разворота;
центром разворота;
радиусом разворота;
значением ХТТ;
значением буфера (BV) (значения буфера указаны в таблице 3.2).
8.7.2 Значение радиуса разворота для этапов прибытия, захода на посадку и вылета определяется следующим образом:
r = (V+Vw)2/127094 × tgγ, км,
где V – максимальная истинная скорость воздушного судна (км/ч);
Vw – максимальная скорость ветра (км/ч);
γ – максимальный угол крена на данном этапе полета (принимаемый равным среднему достигаемому углу крена для этапов полета, плюс 5º).
8.7.3 Защита внешней границы разворота.
Основная зона. Внешняя граница основной зоны определяется дугой радиусом
(r + [0,75 ХTT +(BV/2)]/cos 45º) с центром в точке O, к которой примыкают в точках J и
M внешние границы основной зоны прямолинейных участков до и после разворота.
Точка О является центром разворота (рис. 8.14).
Дополнительная зона. Внешняя граница дополнительной зоны параллельно
смещена от внешней границы основной зоны на расстояние 0,75 ХTT + BV/2.
79
8.7.4 Защита внутренней границы разворота.
Основная зона. Внутренняя граница основной зоны определяется дугой с радиу-
сом
r
и
центром
в
точке
I,
который
находится
на
расстоянии
([0,75 ХTT + (BV/2)]/cos 45º) от точки О, к которой примыкают в точках P и R внутренние границы основной зоны прямолинейных участков до и после разворота.
Дополнительная зона. Внутренняя граница дополнительной зоны параллельно
смещена от внутренней границы основной зоны на расстояние 0,75 ХTT + BV/2.
8.8 ОЦЕНКА ПРЕПЯТСТВИЙ
8.8.1 Определение линии KK’. Линия KK’ проводится через самую раннюю точку разворота перпендикулярно участку пути. Она определяет конец прямого участка до
разворота. Линия KK’ используется для измерения дистанций до препятствий. При
разворотах по набору высоты (вылеты и уход на второй круг) измеряемая дистанция
всегда определяется кратчайшим расстоянием до препятствия.
8.8.2 Определение линии NN’N”. Линия NN’N” строится в том случае если в развороте необходимо выполнить снижение. Линия NN’N” представляет собой границу
самого раннего снижения. Для разворотов в точке пути «флай-бай», где определена
контрольная точка ступенчатого снижения, самая ранняя точка начала снижения не
совпадает с самой ранней точкой разворота. Линия NN’ проводится перпендикулярно
предыдущему участку на расстоянии, равном ATT от точки пути. Линия N’N” проводится параллельно биссектрисе угла разворота со смещением равным АТТ в направлении предыдущего участка. Точка N’ образуется в месте пересечения двух линий. Расстояние до препятствия от границы раннего снижения измеряется от линии NN’N”,
перпендикулярно N’N”(рис. 8.3, 8.5 и 8.6).
Близко расположенные препятствия на расстоянии do ≤9,3 км не учитываются
при определении минимальной высоты участка после точки пути «флай-бай», если
превышение препятствия меньше или равно:
OCA – MOC – ( d0 × 0,15),
80
где OCA – абсолютная высота пролета препятствий на участке, перед точкой
пути «флай-бай»;
d0 – расстояние от препятствия до линии NN’N”;
MOC – запас высоты в основной зоне самого раннего участка.
Рис. 8.1. Малый угол разворота – метод дуги окружности
81
Рис. 8.2. Построение спирали ветра
82
Рис. 8.3. Разворот в точке пути «флай-бай»
83
Рис. 8.4. Разворот в точке пути «флайовер» с участком TF после разворота
84
Рис. 8.5. Линия NN’N” – разворот в точке пути «флай-бай» под углом > 90O
85
Рис. 8.6. Линия NN’N” – разворот в точке пути «флай-бай» под углом ≤ 90O
86
Рис. 8.7. Разворот в точке пути «флайовер»,
после которого следует участок DF – малый угол разворота
87
Рис. 8.8. Разворот в точке пути «флайовер», после которого
следует участок DF – большой угол разворота
88
Рис. 8.9. Разворот на абсолютной/относительной высоте,
после которого следует участок СF
89
Рис. 8.10. Разворот на абсолютной/относительной высоте,
после которого следует участок DF
90
Рис. 8.11. Разворот на абсолютной/относительной высоте
при уходе на второй круг, после которого следует участок DF
91
Рис. 8.12. Разворот при уходе на второй круг в MAPt,
после которого следует участок DF
92
Рис. 8.13. Разворот при уходе на второй круг в MAPt,
после которого следует участок TF или CF
93
Рис. 8.14. Разворот с постоянным радиусом
94
ПРИЛОЖЕНИЕ А К РАЗДЕЛУ 8 УПРОЩЕННЫЙ МЕТОД ОГРАНИЧИВАЮЩИХ ОКРУЖНОСТЕЙ
В качестве альтернативы спирали ветра может использоваться упрощенный метод, в котором для построения зоны защиты разворота строятся окружности
(рис. 8.15).
В отличие от метода спирали ветра, используемое здесь влияние ветра (Е) всегда соответствует изменению курса на 90о.
Метод построения заключается в следующем:
1. Построение начинается в точке А на внешнем краю зоны.
2. На удалении r от точки А, на траверзе номинальной линии пути строится окружность с радиусом Е.
3. Строится дуга радиусом равным r 2 + E 2 с центром в точке Х.
Эта дуга представляет собой внешнюю границу зоны защиты для разворотов от
0о до 90о.
4. На внутреннем краю зоны строится точка А'.
5. На удалении r от точки А', на траверзе номинальной линии пути строится
вторая окружность с радиусом Е.
6. Строится дуга радиусом равным r 2 + E 2 с центром в точке Х'.
Эта дуга завершает границу для разворотов от 0о до 90о.
7. Дуги, построенные из центров X и Х' соединяются касательной.
8. Для построения границы зоны защиты разворотов от 90о до 180о строится дуга радиусом (r + E) с центром в точке Y.
9. Для построения границы зоны защиты разворотов от 180о до 270о строится
дуга радиусом (r + 2E) с центром в точке Z.
Параметры построения зоны защиты разворота r и E рассчитываются по следующим формулам:
r=
V2
127094 × tgγ
км;
95
E=
πwV
254168 × tgγ
км,
где V – истинная скорость в км/ч (TAS);
γ – угол крена;
w – скорость ветра в км/ч (с любого направления 56 км/ч).
Рис. 8.15. Построение внешней границы разворота
96
9 ПОСТРОЕНИЕ Т- ИЛИ Y-ОБРАЗНЫХ СХЕМ НА ОСНОВЕ RNAV
9.1 ОБЩИЕ ПОЛОЖЕНИЯ
Т- или Y-образная конфигурация схем применяется при выполнении неточных
заходов на посадку с использованием RNAV и заходов на посадку с вертикальным наведением (APV).
В основе схем Т- или Y- образной конфигурации лежит выровненный по оси
ВПП конечный участок, которому предшествует промежуточный участок и три начальных участка, расположенных в виде буквы Т или Y по обе стороны относительно
линии пути конечного участка захода на посадку и вдоль нее ( рис. 9.1–9.2).
Т- или Y- образная конфигурация обеспечивает прямой вход в схему с любого
направления, если вход осуществляется из связанного с IAF района захвата.
IAF, расположенная на продолжении линии курса промежуточного участке захода на посадку, называется центральной. В дополнение к ней устанавливаются боковые IAF под углом от 70 до 90 градусов от линии курса промежуточного участка захода на посадку. Такой конфигурацией предусматривается, что при входе из района захвата требуемое изменение курса в IAF не превышает 110°.
Центральный начальный участок может начинаться в IF.
В тех случаях, когда не обеспечиваются одна или обе IAF и прямой вход со всех
направлений осуществить невозможно, может предусматриваться типовая схема ожидания, обеспечивающая возможность входа в схему с выполнением стандартного разворота (рис. 9.3).
IAF, IF и FAF определяются точками пути «флай-бай». Участок ухода на второй
круг начинается в точке пути «флайовер» – MAPt и заканчивается:
в контрольной точке ожидания при уходе на второй круг MAHF;
в начальной контрольной точке захода на посадку IAF (повторный заход на посадку);
или по указанию органа УВД.
97
Для определения точки разворота при уходе на второй круг с разворотом может
также устанавливаться контрольная точка разворота при уходе на второй круг MATF.
Ширина зон учета препятствий определяется в соответствии с допусками, относящимися к навигационной системе, на основе которой построены маршруты зональной навигации.
Рис. 9.1. Общая Т-образная конфигурация
98
Рис. 9.2. Общая Y-образная конфигурация
99
Рис. 9.3. Обратные схемы без смещения на начальном участке
100
9.2 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
9.2.1 Линия пути начального участка захода на посадку устанавливается таким
образом, чтобы выполнялись следующие условия:
- угол разворота при переходе от начального участка захода на посадку на промежуточный участок захода на посадку должен составлять от 70° до 90° для боковых
начальных участков захода на посадку. Для центрального начального участка захода на
посадку разворот при переходе с начального на промежуточный участок следует предусматривать только в исключительных случаях;
- угол разворота при переходе от маршрута подхода к начальному участку захода на посадку не превышал 110°.
9.2.2 Длина начального участка захода на посадку.
За длину начального участка захода на посадку принимается расстояние между
точками IAF и IF.
Начальный участок захода на посадку не имеет максимальной длины.
Минимальная длина не должна быть меньше суммы длин минимальных дистанций стабилизации, определенных с учетом разворотов в IAF и IF для наиболее скоростной категории ВС, для которых строится схема захода на посадку.
Оптимальная длина начального участка захода на посадку составляет 9,3 км (5,5
км для вертолетов).
9.2.3 Градиент снижения на начальном участке захода на посадку.
Оптимальный градиент снижения равен 4% (6,5% для вертолетов). Если для
обеспечения безопасного пролёта препятствий требуется установление большего градиента снижения, то во всех случаях его следует устанавливать не более 8 % (10% для
вертолетов).
Градиент снижения рассчитывается на основе кратчайшего расстояния по линии пути, соответствующего наивысшей скоростной категории воздушных судов, а не
длины участка.
101
9.2.4 Определение максимального снижения на начальном участке захода на посадку.
Максимальное снижение ΔНН max (потеря высоты) на начальном участке захода
на посадку определяется по формуле:
ΔНН max = LПН × G,
где LПН – приведённая длина начального участка захода на посадку;
G – градиент снижения.
Приведённая длина центрального начального участка захода на посадку определяется по формуле (угол разворота в IF=0):
LПН = LН – R × tg (α1/2) + πR(α1/360),
где LН – расстояние от IAF до IF (длина начального участка захода на посадку);
R – радиус разворота при угле крена 250;
α1 – угол разворота в IAF.
Приведённая длина бокового начального участка захода на посадку определяется по формуле:
LПН = LН – R{tg (α1/2) + tg (α2/2)} + πR(α1/360 + α2/360),
где LН – расстояние от IAF до IF (длина начального участка захода на посадку);
R – радиус разворота при угле крена 250;
α1 – угол разворота в IAF;
α2 – угол разворота в IF.
Значение радиуса разворота в метрах определяется по формуле:
R = V2 / 9,81 tgγ,
где V – истинная скорость в м/с;
γ – угол крена в градусах.
102
Разность указанных на схеме высот пролёта IAF и IF не должна превышать значения максимального снижения на начальном участке захода на посадку.
9.3 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
9.3.1 Установление линии пути промежуточного участка захода на посадку.
Линия пути промежуточного участка захода на посадку, как правило, должна совпадать с линией пути конечного участка захода на посадку. Если является необходимым
выполнение разворота в FAF, то угол разворота во всех случаях не должен превышать
30°.
9.3.2 Длина промежуточного участка захода на посадку. За длину промежуточного участка захода на посадку принимается расстояние между точками FAF и IF.
Минимальная длина не должна быть меньше увеличенной на 3,7 км минимальной дистанции стабилизации, определённой с учётом разворота в IF для наиболее скоростной категории ВС, для которых строится схема захода на посадку.
9.3.3 Градиент снижения. На промежуточном участке захода на посадку снижение не рекомендуется.
При необходимости снижения максимально допустимый градиент составляет
5,2%, и конечному участку захода на посадку должен предшествовать горизонтальный
участок не менее 2,8 км для ВС категории С, D и 1,9 км – для ВС категории А, В.
Градиент снижения рассчитывается на основе кратчайшего расстояния по линии пути, соответствующего наивысшей скоростной категории воздушных судов, а не
длины участка.
9.4 КОНЕЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
9.4.1 Установление линии пути конечного участка захода на посадку. Оптимальным является расположение конечного участка захода на посадку в створе осевой
линии ВПП.
Смещённая относительно продолжения осевой линии ВПП линия пути конечного участка захода на посадку может быть установлена только в исключительных случа-
103
ях для обеспечения безопасного пролёта препятствий. При этом должны выполняться
следующие ограничения:
- угол пересечения между продолжением осевой линии ВПП и линией пути конечного участка захода на посадку не должен превышать 300 для ВС категории А и В и
150 для ВС категории C и D;
- если угол пересечения больше 50, то точка пересечения должна располагаться
на удалении не менее 1400 м от порога ВПП;
- если угол пересечения равен 50 или менее, то линия пути конечного участка
должна проходить на удалении 1400 м с боковым отклонением не более 150 м в сторону от продолжения осевой линии ВПП;
- для вертолетов угол пересечения не должен превышать 300. Точка пересечения
должна располагаться на удалении не менее 400 м от FATO. Если линия пути конечного участка захода на посадку не пересекает продолжения оси FATO, она должна проходить на удалении 400 м от FATO с боковым отклонением не более 75 м в сторону от
продолжения осевой линии ВПП.
9.4.2 Оптимальная длина конечного участка захода на посадку составляет 9,3 км
(3,7 км для вертолетов).
9.4.3 Оптимальный градиент/угол снижения на конечном участке неточного захода на посадку составляет 5,2% (3° для захода на посадку с вертикальным наведением).
Максимальный градиент/ угол снижения составляет:
- 6,5% при неточном заходе на посадку воздушных судов категорий А и В (10%
для вертолетов);
- 6,1% для воздушных судов категорий С, D;
- 3,5° при заходе на посадку с вертикальным наведением.
104
9.5 УХОД НА ВТОРОЙ КРУГ ПРИ НЕТОЧНОМ ЗАХОДЕ НА ПОСАДКУ
Точка ухода на второй круг определяется точкой пути «флайовер».
Точка ухода на второй круг – MAPt, как правило, располагается на пороге ВПП
посадки. Если направление линии пути на конечном участке захода на посадку не совпадает с направлением осевой линии ВПП, оптимальным расположением является пересечение линии пути конечного участка захода на посадку с продолжением осевой
линии ВПП (рис.9.4).
В том случае, когда для обеспечения безопасного пролёта препятствий при уходе на второй круг начало ухода должно выполняться ранее пролёта порога ВПП, MAPt
может быть перенесена по направлению к FAF, но не далее расстояния, которое соответствует удалению от порога ВПП точки пересечения номинальной траектории снижения с горизонтальной плоскостью, проходящей на минимальной безопасной высоте
пролёта препятствий.
105
Рис. 9.4. Местоположение MAPt
106
10 АБСОЛЮТНАЯ ВЫСОТА ПРИБЫТИЯ В РАЙОН АЭРОДРОМА (ТАА)
10.1 ОБЩИЕ ПОЛОЖЕНИЯ
С целью облегчения выполнения захода на посадку по T/Y-образным схемам
применяется концепция абсолютной высоты прибытия в район аэродрома (ТАА).
В схемах захода на посадку по приборам на основе RNAV вместо TAA может
устанавливаться минимальная высота в секторе.
Опорными точками ТАА являются начальная контрольная точка захода на посадку (IAF) и/или промежуточная контрольная точка (IF).
Каждая ТАА рассчитывается путем добавления к наивысшему препятствию в
рассматриваемой зоне запаса высоты, равного 300 м, и округления результирующей
величины до следующего большего значения, кратного 50 м. Если разница между соседними ТАА составляет 100 м и менее, может быть установлена минимальная абсолютная высота, применимая в качестве всех ТАА.
Минимальная абсолютная высота применяется в пределах радиуса 46 км от точек пути RNAV, на которых основан заход на посадку по приборам. При полетах над
горной местностью минимальный запас высоты над препятствиями должен увеличиваться на 300 м.
10.2 ПОСТРОЕНИЕ
Стандартная конфигурация состоит из трех зон ТАА: прямой зоны и левой основной и правой основной зон.
Боковые границы ТАА определяются продолжением основных левого и правого
начальных участков.
Внешние границы зоны определяются дугами радиусом 46 км с центром в каждой из трех IAF или в IAF двух боковых зон и IF там, где не обеспечивается центральный начальный участок (рис. 10.1 – 10.2).
107
10.3 БУФЕРНАЯ ЗОНА
Каждая зона ТАА окружена буферной зоной шириной 9 км. Если в пределах
буферной зоны высота препятствий превышает самое высокое препятствие в пределах
зоны ТАА, минимальная абсолютная высота рассчитывается путем добавления запаса
высоты, составляющего, по меньшей мере, 300 м к самому высокому превышению в
буферной зоне и округления результирующей величины до ближайшего значения,
кратного 50м.
10.4 ДУГИ СТУПЕНЧАТОГО СНИЖЕНИЯ ТАА И ПОДСЕКТОРЫ
Для учета изменения рельефа местности, эксплуатационных ограничений или
слишком больших градиентов снижения может быть определена дополнительная круговая граница или «дуга ступенчатого снижения», разделяющая зону абсолютной высоты прибытия в район аэродрома (ТАА) на две зоны с меньшей абсолютной высотой
во внутренней зоне. Кроме того, прямая зона ТАА может быть разделена на радиальные подсекторы.
Число дуг ступенчатого снижения ограничивается одной на одну зону ТАА. Дуга ступенчатого снижения должна находиться на расстоянии не менее 19 км от контрольной точки, которая является центром этой дуги, и на расстоянии не менее 19 км
от границы ТАА, расположенной на расстоянии 46 км, с тем, чтобы исключить слишком малые подсекторы.
Прямая зона ТАА может быть также радиально разделена на подсекторы. Минимальный размер любого подсектора прямой зоны ТАА, которой также содержит дугу ступенчатого снижения, соответствует дуге не менее 45°. Минимальный размер любого подсектора прямой зоны ТАА, в котором отсутствует дуга ступенчатого снижения, соответствует дуге не менее 30°.
В левой и правой основных зонах ТАА могут быть только дуги ступенчатого
снижения, и дальнейшему делению на радиальные подсекторы они не подлежат.
Ширина буферной зоны между соседними дугами ступенчатого снижения и соседними подсекторами составляет 9 км.
108
Рис. 10.1. Y-образная конфигурация зон ТАА
109
Рис. 10.2. Т-образная конфигурация зон ТАА
10.5 ОПУБЛИКОВАНИЕ
ТАА наносится на горизонтальную проекцию карт захода на посадку с помощью «пиктограмм», на которых указывается опорная точка ТАА (IAF или IF), радиус
от опорной точки и азимуты границ ТАА.
Пиктограмма для каждой зоны ТАА на горизонтальной проекции должна располагаться и ориентироваться относительно направления прибытия к схеме захода на
посадку и показывать все минимальные абсолютные высоты ТАА и дуги ступенчатого
снижения для данной зоны.
IAF для каждой ТАА обозначается названием точки пути для оказания помощи
пилотам в ориентации пиктограммы по отношению к схеме захода на посадку. Название IAF и расстояние границы зоны ТАА от IAF указывается на внешней стороне дуги
110
пиктограммы зоны ТАА. Пиктограммой ТАА при необходимости также обозначается
местоположение промежуточной контрольной точки IF, но без ее идентификатора во
избежание неправильного опознавания опорной точки ТАА. Примеры публикации
схем с пиктограммами показаны на рис.10.3 – 10.4.
Рис.10.3. Пиктограммы Т-образного расположения ТАА
111
Рис.10.4. Пиктограммы Y-образного расположения ТАА
112
11 КРИТЕРИИ ПОСТРОЕНИЯ СХЕМ
11.1 СХЕМЫ ВЫЛЕТА
11.1.1 В настоящем подразделе содержатся критерии построения схем вылета на
основе RNAV 1, RNAV 2 и Basic-RNP 1.
11.1.2 Дополнительные зоны.Принцип дополнительных зон применяется в отношении прямолинейных участков. Дополнительные зоны ограничиваются той частью
схемы, где полная ширина основной зоны, по меньшей мере, равна половине ширины
зоны в первой точке пути (рис. 11.3).
11.1.3. Минимальная длина участка и средняя траектория полета. Минимальные допустимые длины участков представлены в таблицах 7.1 – 7.11. Для построения
средней
траектории
полета
используются
соотношения
значений
скоро-
сти/расстояния/угла крена, приведенные в таблице 11.1.
В зависимости от расстояния от DER определяют приборную скорость (IAS),
угол крена и относительную высоту над аэродромом. Применяется расстояние «вдоль
линии пути» от DER до точки пути/точки разворота. Когда ограничение по скорости
меньше скорости, соответствующей данному расстоянию по таблице скоростей, эта
скорость заменяет табличное значение. При расчете истинной скорости TAS необходимо учитывать набор высоты воздушным судном. Приведенные в таблице значения
рассчитаны с использованием градиента набора высоты 7%, начиная от DER. Если для
пролета препятствий или для целей обслуживания воздушного движения (ОВД) требуется градиент более 7%, для расчетов применяется требуемый повышенный градиент
набора высоты.
На начальном этапе схемы вылета с разворотом следует учитывать возможные
ограничения угла крена в зависимости от высоты:
- до высоты 305 м используется угол крена 15º;
- начиная с высоты 915 м – угол крена 25º.
113
Поскольку величина угла крена влияет на значение радиуса разворотов, для
обеспечения плавного перехода в интервале высот 305 м – 915 м используется угол
крена 20º.
11.1.4 Ширина зон.Для вылетов на основе RNAV 1, RNAV 2 и Basic-RNP 1 полная ширина зоны представляет собой результат соединения различных по ширине зон,
рассчитанных в соответствующих контрольных точках. Расчет допусков ХТТ, АТТ и
половины ширины зоны в зависимости от навигационного средства представлен:
- в п.4.3 – при использовании базовой GNSS;
- в п.5.5 – при использовании DME/DME.
В том случае, если допускается использование нескольких разных датчиков, в
каждой точке пути применяются большие значения ХТТ, АТТ и 1/2W.
11.1.5 Вылет по прямой. Выравнивание по направлению в начальной части линии пути вылета (α ≤ 15º) определяется позицией первой после взлетного конца ВПП
(DER) точки пути.
11.1.6 Ширина зоны в начале схемы вылета. Зона вылета по прямой без наведения по линии пути начинается у DER и имеет первоначальную ширину 300 м (90 м для
вертолетов). Она располагается симметрично относительно осевой линии ВПП с расхождением под углом 15º с каждой стороны продолжения осевой линии ВПП
(рис.11.1). Начальная зона вылета с корректировкой линии пути (α ≤ 15º) без наведения
по линии пути показана на рис.11.2.
При построении ширины зоны вылета, основанного на зональной навигации,
применяются вышеуказанные критерии до тех пор, пока начальные границы зоны вылета, расширяясь, не достигнут внешних границ фиктивной зоны. После чего зона продолжается с постоянной шириной фиктивной зоны до первой точки пути схемы вылета. Фиктивная зона начинается в DER и продолжается до первой точки пути. Половина
ширины этой зоны в DER и в первой точке пути зависит от типа навигационного датчика. Применительно к GNSS для указанных навигационных спецификаций половина
ширины фиктивной зоны составляет 3,7 км.
114
Построение начальной части зоны вылета применительно к GNSS с корректировкой линии пути представлено на рисунке 11.3.
После начального расширения от DER ширина зоны изменяется в точке, расположенной на расстоянии 28 км от КТА, а затем в точке, расположенной на расстоянии
56 км от КТА. Сопряжение зон производится в соответствии с п.3.4.2.
115
Таблица 11.1. Параметры для построения средней траектории полета
Дистанция
от DER, км
Относительная
высота, м
Угол крена,
град.
Скорость
(IAS), км/ч
1,9
3,7
5,6
7,4
9,3
11,1
13
14,8
16,7
18,5
20,4
22,2
24,1
25,9
27,8
29,6
130
259
389
518
648
777
907 1037 1167 1296 1476 1556 1685 1815 1945 2074 2204 2334
15
15
20
20
20
20
20
25
25
25
25
25
25
25
25
25
25
25
356
370
387
404
424
441
452
459
467
472
478
483
487
491
493
494
498
502
Примечание. Скорость не должна превышать максимальную скорость, указанную в таблице 2.2.
Пример.
Используемые данные:
1 – абсолютная высота аэродрома 715 м;
2 – требуется разворот после пролета 31,5 км по линии пути.
Из таблицы находятся:
1 – предполагаемая относительная высота воздушного судна: 2204 м;
2 – угол крена 25º;
3 – скорость 498 км/ч IAS.
Расчет радиуса разворота:
1 – абсолютная высота воздушного судна составляет: 715 м + 2204 м = 2919 м;
2 – коэффициент перевода в TAS – 1,1958;
3 – TAS: 498 км/ч × 1,1958 = 596 км/ч;
4 – радиус разворота средней траектории полета 6,0 км.
31,5
33,3
116
Рис.11.1. Зона вылета по прямой без наведения по линии пути
Рис.11.2. Зона вылета по прямой с корректировкой линии пути
(точка корректировки не установлена)
117
Рис 11.3. Вылет по прямой
11.1.7 Вылеты с разворотом.
В схемах могут применяться следующие виды разворотов:
- разворот в точке пути «флай-бай»;
- разворот в точке пути «флайовер» (соответствует развороту в заданной точке);
- разворот на абсолютной/относительной высоте.
Во всех случаях, когда это допускается, наиболее предпочтительным является
использование разворота в точке пути «флай-бай».
При построении схем необходимо, чтобы каждый отдельно задаваемый разворот составлял, по крайней мере, 5° и не превышал 120°. Однако, при построении схем с
использованием участка DF допускается угол разворота более 120°.
Материал, касающийся построения зоны защиты разворота в точке пути «флайбай», «флайовер» и на абсолютной/относительной высоте, содержится в разделе 8
«Защита разворота и оценка препятствий» и рис. 11.4, 11.5.
118
Рис. 11.4. Разворот в точке пути «флай-бай»
119
Рис. 11.5. Разворот в точке пути «флайовер», после которого
следует участок TF
11.2 СХЕМЫ ПРИБЫТИЯ И ЗАХОДА НА ПОСАДКУ
11.2.1 В настоящем подразделе содержатся критерии построения схем прибытия, начального и промежуточного участков захода на посадку и конечного этапа ухода на второй круг на основе RNAV 1, RVAV 2, Basic-RNP 1 и RNP APCH.
Критерии построения схем конечного участка захода на посадку, начального и
промежуточного этапов ухода на второй круг, в зависимости от типа захода на посадку, приведены:
- в п. 11.3 – для неточного захода на посадку;
- в разделе 12 – для захода на посадку с вертикальным наведением;
- в разделе 13 – для точного захода на посадку.
11.2.2 Минимальные допустимые длины участков представлены в таблицах
7.1 – 7.6.
11.2.3 Применяется принцип дополнительных зон в соответствии с п.2.1.
11.2.4. Ширина зон. Полная ширина зоны представляет собой результат соединения различных по ширине зон, рассчитанных в соответствующих контрольных точ-
120
ках. Расчет допусков ХТТ, АТТ и половины ширины зоны, в зависимости от навигационного средства, представлен:
- в п.4.3 при использовании базовой GNSS;
- в п.5.5 при использовании DME/DME.
11.2.5 Сопряжение промежуточного и конечного участков захода на посадку, а
также участка полета по маршруту и начального участка захода на посадку производится в соответствии с п.3.4.2 (рис.11.6 и 11.7).
11.2.6 Схемы прибытия
11.2.6.1 Схемы прибытия устанавливаются между последней точкой полёта по
маршруту и точкой начального участка захода на посадку IAF или промежуточного
участка захода на посадку IF.
11.2.6.2 При отсутствии ТАА на схемах публикуется минимальная безопасная
высота в круге с центром в контрольной точке аэродрома (КТА).
11.2.6.3 Критерии пролета препятствий на этапе прибытия применяются до начальной или промежуточной контрольной точки захода на посадку.
11.2.6.4 Минимальный запас высоты над препятствиями в основной зоне составляет 300 м. В дополнительной зоне запас высоты над препятствиями 300 м обеспечивается у внутреннего края с линейным уменьшением до нуля на внешнем крае.
11.2.7 Начальный участок захода на посадку
11.2.7.1 Критерии по установлению линии пути начального участка захода на
посадку, длины и градиента снижения см. в п. 9.2.
Если при построении схем не используется Т- или Y- образная конфигурация,
развороты на начальном участке захода на посадку не должны быть более 1200. Следует избегать изменения линии пути в точке пути более чем на 900. Развороты более чем
на 900 должны обеспечиваться посредством использования нескольких точек пути или
участка RF.
Угол пересечения между линией пути начального участка захода на посадку и
линией пути промежуточного участка захода на посадку не превышает 900.
121
11.2.7.2 Материал, касающийся построения зоны защиты разворота в точке пути
«флай-бай», «флайовер» и разворота с заданным радиусом RF содержится в разделе 8
«Защита разворота и оценка препятствий».
11.2.7.3 При построении схем RNAV не следует использовать обратные схемы.
При необходимости может быть использована схема «ипподром».
11.2.7.4 Минимальный запас высоты над препятствиями в основной зоне составляет 300 м. В дополнительной зоне запас высоты над препятствиями 300 м обеспечивается у внутреннего края с линейным уменьшением до нуля на внешнем крае.
Расчет OCA/H производится в соответствии с п. 2.1, 2.2.
11.2.8 Промежуточный участок захода на посадку
11.2.8.1. Выравнивание промежуточного этапа захода на посадку по направлению.
Для схем неточного захода на посадку линия пути промежуточного участка захода на посадку, как правило, должна совпадать с линией пути конечного участка захода на посадку. Если является необходимым выполнение разворота в FAF, то угол
разворота во всех случаях не должен превышать 30° (для вертолетов – 600).
Для схем захода на посадку с вертикальным наведением и схем точного захода
на посадку линия пути промежуточного участка захода на посадку совпадает с линией
пути конечного участка захода на посадку.
11.2.8.2 Длина промежуточного участка. Длина промежуточного участка захода на посадку может включать две составляющие:
- составляющую разворота (при развороте в IF);
- прямолинейную составляющую.
Составляющая разворота представляет собой минимальную дистанцию стабилизации, определённую с учётом разворота в IF для наиболее скоростной категории
ВС, для которых строится схема захода на посадку в соответствии с таблицей 7.3.
122
Длина прямолинейной составляющей является переменной величиной, но не
должна быть менее 3,7 км.
Для точного захода на посадку с использованием GBAS применяются критерии
раздела 13.
11.2.8.3 Критерии по установлению градиента снижения см. в п. 9.3.3.
11.2.8.4 Минимальный запас высоты над препятствиями в основной зоне составляет 150 м. В дополнительной зоне запас высоты над препятствиями 150 м обеспечивается у внутреннего края с линейным уменьшением до нуля на внешнем крае.
Расчет OCA/H производится в соответствии с п. 2.1, 2.2.
123
Рис. 11.6. Зона учета препятствий маршрута прибытия:
IAF находится за пределами 56 км от КТА
124
Рис. 11.7. Зона учета препятствий маршрута прибытия:
IAF находится в пределах 56 км от КТА
125
11.2.9 Уход на второй круг с разворотом. Параметры разворота, критерии защиты разворота и оценки препятствий содержатся в разделе 8 «Защита разворота и
оценка препятствий».
11.2.9.1 Запас высоты в зоне разворота. Оценка препятствий в зоне разворота
производится в зависимости от вида разворота: на заданной высоте или в контрольной
точке.
Для разворотов на заданной высоте превышение препятствий в зоне разворота
должно быть менее:
НПР ≤ TNН + do × tg z – MOC,
где
TNН – заданная высота разворота;
do – кратчайшее расстояние от препятствия до границы зоны начала разворота;
tg z – тангенс угла, образуемого поверхностью ухода на второй круг
и горизонтальной плоскостью;
MOC – запас высоты, равный 50 м в основной зоне учета препятствий.
Если в схеме отсутствует запрет на развороты до MAPt необходимо обеспечение защиты ранних разворотов. Для этого, за пределами зоны конечного участка захода на посадку строится зона в соответствии с рис. 8.11, где do измеряется от препятствия до ближайшей точки на краю зоны конечного участка захода на посадку. Если этот
критерий не может быть выполнен, схемой должно запрещаться выполнение разворотов до достижения MAPt и карту профиля захода на посадку необходимо дополнить
соответствующим примечанием.
Для разворотов в заданной контрольной точке превышение препятствий в зоне
разворота должно быть менее:
НПР ≤ OCA/H + do × tg z – MOC,
где do = dZ + кратчайшее расстояние от препятствия до линии К-К;
dZ – горизонтальное расстояние от SOC до самой ранней ТР (линии К-К).
126
Для схем ухода на второй круг с использованием приемников GNSS, которые не
обеспечивают непрерывное наведение по линии пути после MAPt, при построении
первого сегмента ухода на второй круг следует использовать только участок DF.
Уход на второй круг завершается на высоте, которая позволяет выполнить повторный заход, начать полет по маршруту или возвратиться к установленной схеме
ожидания.
11.3. СХЕМЫ НЕТОЧНОГО ЗАХОДА НА ПОСАДКУ
11.3.1 В настоящем подразделе содержатся критерии построения схем неточного захода на посадку, применимых к схемам RNP APCH.
11.3.2 Конечный участок захода на посадку.
11.3.2.1 Линия пути конечного участка захода на посадку должна выравниваться
по направлению осевой линии ВПП. Если это невозможно, применяются критерии
п.9.4.1.
11.3.2.2 Оптимальная длина конечного участка захода на посадку составляет
9,3 км (3,7 км для вертолетов). Максимальная длина – 18,5 км, минимальная длина (расстояние между FAF и порогом) – 5,6 км. Исключение составляют схемы RNAV с изменениями линиями пути в FAF для воздушных судов категорий D/DL, Е и Н (табл.11.2).
Таблица 11.2. Минимальная длина конечного участка захода на посадку
Категория ВС
Угол разворота в FAF
100 или менее
200
300
600
D/DL
5,6 км
5,6 км
6,5 км
-
Е
5,6 км
6,5 км
7,4 км
-
Н
1,9 км
2,8 км
3,7 км
5,6 км
11.3.2.3 Оптимальный градиент/угол снижения на конечном участке неточного
захода на посадку составляет 5,2% (3° для захода на посадку с вертикальным наведением).
Максимальный градиент/ угол снижения составляет:
127
6,5% – для воздушных судов категорий А, В;
6,1% – для воздушных судов категорий С, D;
3,5° – при заходе на посадку с вертикальным наведением.
11.3.2.4 Зона учёта препятствий конечного участка захода на посадку
(рис.11.8). Зона учета препятствий конечного участка захода на посадку формируется
на основе ширины зоны в MAPt и сопряжения конечного участка и промежуточного
участка захода на посадку в точке FAF в соответствии с п. 3.4.2.
Применяется принцип дополнительных зон в соответствии с п.2.1.
11.3.2.5 Минимальный запас высоты над препятствиями в основной зоне составляет 75 м. В дополнительной зоне запас высоты над препятствиями 75 м обеспечивается у внутреннего края с линейным уменьшением до нуля на внешнем крае.
Расчет OCA/H производится в соответствии с п. 2.1, 2.2.
При смещённой относительно продолжения осевой линии ВПП линии пути конечного участка захода на посадку в соответствии с п.9.4.1 расчетная OCH не должна
быть менее приведенной в таблице 11.3.
Таблица 11.3. Минимальные значения OCH
Категория ВС
A
B
C
D
Угол пересечения между продолжением осевой линии ВПП и линией
пути конечного участка захода на посадку θ
0
5 < θ ≤ 150
150 < θ ≤ 300
105
115
115
125
125
–
130
–
128
Рис. 11.8. Зона учета препятствий промежуточного и конечного
участков захода на посадку для RNP APCH на основе базовой GNSS
11.3.3 Начальный и промежуточный этапы ухода на второй круг.
11.3.3.1 Применяются общие критерии, изложенные в п. 2.3.
11.3.3.2 Точка ухода на второй круг (MAPt). Точка ухода на второй круг определяется точкой пути «флайовер».
При заходах на посадку, выровненных по направлению осевой линии ВПП, точка ухода на второй круг – MAPt располагается на пороге ВПП посадки или до него. Если направление линии пути на конечном участке захода на посадку не совпадает с направлением осевой линии ВПП, оптимальным расположением является пересечение
линии пути конечного участка захода на посадку с продолжением осевой линии ВПП
(рис.9.4).
В том случае, когда для обеспечения безопасного пролета препятствий при уходе на второй круг начало ухода должно выполняться ранее пролета порога ВПП, MAPt
может быть перенесена по направлению к FAF при условии, что OCH не меньше, чем
относительная высота в MAPt при номинальном градиенте снижения 5,2% (30).
129
11.3.3.3 Длина зоны ухода на второй круг. Минимальные расстояния между
MAPt и MATF или MAHF, определяющие протяженность участка, содержатся в таблице 7.4.
11.3.3.4 Ширина зоны учета препятствий ухода на второй круг. Зона учёта
препятствий этапа ухода на второй круг начинается в самой ранней точке ухода на
второй круг, определяемой величиной АТТ в MAPt (АТТ=440м для RNP APCH на
GNSS). Зона расширяется с углом 150 в каждую сторону относительно линии пути ухода на второй круг до достижения ширины зоны, соответствующей самой ранней
MATF. Используется принцип дополнительных зон (рис.11.9).
Рис. 11.9. Зона учета препятствий участка ухода на второй круг
для RNP APCH на основе базовой GNSS
130
12 СХЕМЫ ЗАХОДА НА ПОСАДКУ С ВЕРТИКАЛЬНЫМ
НАВЕДЕНИЕМ (APV) / БАРОМЕТРИЧЕСКАЯ
ВЕРТИКАЛЬНАЯ НАВИГАЦИЯ (БАРО-VNAV)
Барометрическая вертикальная навигация (баро-VNAV) представляет собой навигационную систему, которая выдает пилоту вычисленное вертикальное наведение
относительно определенного угла траектории в вертикальной плоскости (VPA), номинальное значение которого составляет 3°. Обеспечиваемое с помощью ЭВМ вертикальное наведение основывается на барометрической высоте и определяется в виде угла траектории в вертикальной плоскости от высоты опорной точки (НОТ / RDH)..
Расстояния и высоты измеряются относительно порога ВПП (значения до/выше
порога считаются положительными, значения после/ниже порога считаются отрицательными).
12.1 ОБЩИЕ ПОЛОЖЕНИЯ
12.1.1 Критерии, связанные с боковой навигацией (LNAV), основаны на критериях RNP APCH.
12.1.2 Схемы захода на посадку по баро-VNAV классифицируются как схемы
полетов по приборам для обеспечения заходов на посадку и посадок с вертикальным
наведением (APV). В связи с этим в данных схемах вместо минимальной высоты снижения используется высота принятия решения DA/H и не определяется ни FAF, ни
точка ухода на второй круг (MAPt). В них применяются аналогичные ИЛС поверхности оценки препятствий, которые основываются на специальных системах горизонтального наведения.
12.1.3 Схемы баро-VNAV применяются только совместно со схемами LNAV.
FAF и MAPt, относятся только к LNAV и используются для определения зон, однако
не являются составной частью схемы с вертикальным наведением.
12.1.4 Построение схемы баро-VNAV осуществляется в три этапа:
- определение угла наклона траектории в вертикальной плоскости (VPA) и угла
поверхности конечного участка захода на посадку (FAS);
131
- построение поверхностей оценки препятствий для захода на посадку с вертикальным наведением (APV-OAS);
- расчет минимальной безопасной высоты пролета препятствий OCA/H на основе препятствий, выступающих за эти поверхности.
12.1.5 Схемы захода на посадку с вертикальным наведением могут быть установлены только в том случае, если ВПП и соответствующие поверхности ограничения
препятствий как минимум отвечают требованиям, изложенным в НГЭА или АП-139:
к ВПП неточного захода на посадку, если OCH составляет 90 м и более;
к ВПП точного захода на посадку по кат. I, если OCH – менее 90 м.
12.2 СТАНДАРТНЫЕ УСЛОВИЯ
12.2.1 Требования к воздушному судну. Схемы APV/баро-VNAV предназначаются для использования воздушными судами, оборудованными системами AРV/бароVNAV, которые утверждены государством эксплуатанта для полетов с применением
соответствующего уровня навигации в боковой плоскости (LNAV)/VNAV.
12.2.2 Для схем баро-VNAV установлены следующие минимальные значения
OCH:
- 75 м при условии проведения оценки предусмотренных НГЭА и АП-139 внутренней поверхности захода на посадку, внутренней переходной поверхности и поверхности прерванной посадки и определения того, что они не нарушены;
- 90 м во всех других случаях.
12.2.3 Оптимальным публикуемым значением VPA является 3°. Это значение не
должно быть менее 3° или более 3,5° (п.12.4).
12.2.4 Относительная высота опорной точки составляет 15 м.
12.2.5 Высоты всех препятствий отсчитываются от превышения порога ВПП.
12.3 УЧАСТОК APV
12.3.1 Участок APV при баро-VNAV выравнивается по продолжению осевой
линии ВПП и включает:
конечный участок захода на посадку;
132
начальный, промежуточный и конечный участки ухода на второй круг.
12.3.2 Поверхности APV-OAS начинаются в точке конечного участка захода на
посадку (FAP), которая расположена в месте пересечения вертикальной траектории и
минимальной относительной высоты, указанной для предыдущего участка. FAP не
должна располагаться на расстоянии более 19 км перед порогом ВПП. APV-OAS заканчиваются в контрольной точке ожидания при уходе на второй круг (MAHF) или в
контрольной точке разворота при уходе на второй круг (MATF), в зависимости от того,
какая из них является первой.
FAF и MAPt, относящиеся к LNAV, используются для определения конфигурации зон и поверхностей. После построения схемы, относящиеся к схеме LNAV FAF и
MAPt, используются только в целях кодирования базы данных и определения любой
исходной схемы LNAV (RNP APCH).
12.3.3 Взаимосвязь поверхностей APV-OAS с критериями LNAV. Верхние/внешние края боковых поверхностей APV-OAS соответствуют внешним краям дополнительных зон LNAV. Нижние/внутренние края боковых поверхностей APV-OAS
соответствуют краям основной зоны LNAV (рис.12.1 – 12.3).
Высоты внешних краев боковых поверхностей определяются следующим:
- величиной запаса высоты над препятствиями конечного участка захода на посадку (MOC) над внутренней границей боковой поверхности, примыкающей к FAS;
- величиной 30 м над внутренним краем боковой поверхности, примыкающей к
поверхности промежуточного этапа ухода на второй круг;
- величиной 50 м над внутренним краем, примыкающей к поверхности конечного этапа ухода на второй круг.
Относительная высота внешней границы боковой поверхности, соединяющей
FAS с поверхностью промежуточного этапа ухода на второй круг, изменяется в пределах ее длины от значения MOC до 30 м.
133
12.4 ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОЙ ПУБЛИКУЕМОЙ ТЕМПЕРАТУРЫ
12.4.1 Определяется минимально возможная температура (поправка на температуру принимается согласно п. 12.4.2) и ее значение округляется до следующего более
низкого значения, кратного 5°С. Это значение используется для расчета минимального
VPA и FAS. Минимальный VPA при этой температуре не должен быть менее 2,50. Далее:
- для этой температуры рассчитывается угол FAS (п. 12.5.1) и, если он составляет менее 2,5°, публикуемое значение VPA увеличивается в целях гарантии того, чтобы
угол FAS при минимальной температуре соответствовал или превышал 2,5°;
- пересматривается протяженность предыдущего участка, с тем, чтобы обеспечить соблюдение соответствующих требований к минимальному расстоянию перед пересечением вертикальной траектории.
Минимальное значение температуры определяется путем нахождения средней
минимальной температуры самого холодного месяца года по данным за последние пять
лет для превышения аэродрома. Для опубликования полученное значение температуры
округляется до следующего более низкого значения, кратного 5°С. Полученная поправка на низкую температуру применима для этой температуры, превышения аэродрома и относительной высоты FAP.
Ограничения в отношении минимальной температуры не применяются к воздушным судам:
- оборудованным системами управления полетом, обеспечивающими температурную компенсацию на конечном участке захода на посадку.
- оборудованным системами управления полетом с утвержденной функцией
температурной компенсации на конечном участке захода на посадку, при том условии,
что минимальная температура не ниже температуры, на которую сертифицировано
оборудование.
134
Расчет VPA на основе требуемого FAS (для исключения значительного препятствия) осложняется взаимозависимостью относительной высоты в FAP и поправки на
температуру. Вследствие этого расчет FAS начинается с оптимального VPA 3°. Если
FAS должен быть поднят над значительными препятствиями, то в этом случае необходимо увеличивать VPA и/или уменьшать относительную высоту в FAP до получения
оптимального решения.
12.4.2 Поправка на температуру. Рассчитанные минимальные безопасные высоты корректируются в том случае, когда температура окружающего воздуха на поверхности гораздо ниже, чем температура, предусматриваемая стандартной атмосферой.
Для расчета угла FAS поправка на низкую температуру определяется из таблицы 12.1. Эта таблица рассчитана для аэродрома на уровне моря. В этой связи она дает
консервативные значения, когда используется на более высоких аэродромах.
Таблица 12.1. Поправка на температуру для расчета угла FAS (м)
Температура
аэродрома
(°С)
0
–10
–20
–30
–40
–50
Относительная высота FAP над порогом ВПП (м).
300
17
29
42
56
77
88
450
25
43
63
84
107
132
600
33
58
84
112
146
176
750
42
72
105
141
179
222
900
50
87
126
169
216
267
1 200
67
116
169
226
289
358
1 300
73
126
183
246
314
388
1 400
78
136
198
265
339
419
1 500
84
146
212
285
364
450
12.5 ПОСТРОЕНИЕ ПОВЕРХНОСТЕЙ OAS
OAS используется для определения подлежащих учету препятствий и состоит
из следующих поверхностей:
- поверхности конечного участка захода на посадку (FAS);
- горизонтальной поверхности;
135
- поверхности промежуточного и конечного этапов ухода на второй круг (Zi, и
Zf, соответственно). Длина начального участка ухода на второй круг учитывается при
расчете поверхностей Zi и Zf.
Каждая поверхность имеет примыкающие боковые поверхности.
Расположение препятствий указывается в обычной системе координат X, Y, Z,
началом которой служит порог ВПП. При всех расчетах, связанных с геометрией OAS,
значения координаты «Y» всегда считаются положительными.
12.5.1. Поверхность конечного участка захода на посадку (FAS). Начало поверхности FAS находится на уровне порога ВПП и удалено от него на расстояние, соответствующее расположению точки, в которой вертикальная траектория достигает
относительной высоты, равной MOC над порогом ВПП, плюс продольное расстояние
444 м (АТТ). Она простирается до дальности, соответствующей FAP + АТТ, с углом,
определенным в п. 12.4 (рис. 12.4).
Поверхность FAS ограничивается в боковой плоскости краями основной зоны
LNAV. Внутренние края примыкающих боковых поверхностей определяются краями
основной зоны LNAV и превышением, соответствующим превышению FAS в данной
точке, а внешние края – краями дополнительных зон LNAV и превышением, соответствующим MOC над превышением FAS в данной точке.
Угол FAS (tgαFAS ) рассчитывается по формуле:
(относительная высота в FAP – поправка на температуру – MOC) × tg VPA
tgαFAS = ---------------------------------------------------------------------------------------относительная высота в FAP – MOC
Начало поверхности FAS (XFAS) на уровне порога ВПП определяется следующим образом:
MOC – Hо.т.
XFAS = -------------------- + АТТ
tg VPA
136
Относительная высота FAS (hFAS) на расстоянии «Х» от порога ВПП определяется следующим образом:
hFAS = (Х – ХFAS) × tg α FAS,
где
MOC – запас высоты на конечном участке захода на посадку,
Hо.т. – высота опорной точки (м),
АТТ – допуск вдоль линии пути (444 м);
поправка на температуру – см. таблица 12.1.
12.5.2 Поверхность дополнительной оценки препятствий. Для защиты воздушных судов, оснащенных вертикальной угловой шкалой и выполняющих схемы
APV/баро-VNAV, проводится дополнительная оценка препятствий, если длина конечного участка захода на посадку превышает 9,26 км.
Поверхность дополнительной оценки основывается на применении поверхности W. В том случае, если длина конечного участка захода на посадку превышает 9,26
км, плоскость W после точки, в которой она пересекает поверхность конечного участка
захода на посадку, становится поверхностью оценки препятствий в основной зоне,
простирающейся до FAP (рис. 12.5, 12.6).
12.5.3 Горизонтальная поверхность. Горизонтальная поверхность определяется
как поверхность на уровне порога ВПП, ограниченная основной зоной LNAV между
началом поверхности FAS (XFAS) и началом поверхности ухода на второй круг.
Нижние/внутренние края боковых поверхностей определяются краями основной
зоны LNAV на уровне порога ВПП.
Верхние/внешние края примыкающих боковых поверхностей определяются
внешними краями дополнительных зон LNAV и величиной MOC над порогом ВПП в
начале FAS и внешними границами зоны LNAV, расположенными на высоте 30 м над
порогом ВПП в начале поверхности промежуточного этапа ухода на второй круг на
расстоянии Zi относительно порога ВПП (положительное значения до порога, отрицательные – после него). Ниже приведен алгоритм для расчета относительной высоты в
137
любом местоположении Х, Y в пределах этих боковых поверхностей, заданных четырьмя координатами Х, Y и относительными высотами вершин этих поверхностей.
Алгоритм расчета. Высота (Z) точки на боковой поверхности OAS, расположенной в (X, Y) между началом FAS на уровне порога ВПП (ХFAS) и началом поверхности
Zi (XZi,) на уровне порога ВПП, может быть рассчитана с помощью четырех вершин
боковой поверхности (Х1, Y1, Z1), (Х2, Y2, Z2), (ХЗ, Y3, Z3), (Х4, Y4, Z4) и следующих формул (рис. 12.7):
Определение вершин:
X1= X3 = ХFAS;
X2 = X4 = XZi;
Y1 и Y2 – удаление края основной зоны соответственно в ХFAS и XZi;
Y3 и Y4 – удаление края дополнительной зоны соответственно в ХFAS и XZi;
Z1 = Z2 = 0;
Z3 = MOC;
Z4 = 30м.
Расчет Z в (X, Y):
X5 = X;
Y5 = Y1 + (Y2 – Y1) × ((X1 – X) / (X1 – X2));
Z5 = Z1 + (Z2 – Z1) × ((X1 – X) / (X1 – X2)).
X6 = X;
Y6 = Y3 + (Y4 – Y3) × ((X3 – X) / (X3 – X4));
Z6 = Z3 + (Z4 – Z3) × ((X3 – X) / (X3 – X4)).
Итоговая формула расчета относительной высоты Z:
Z = Z5 + (Z6 – Z5) × ((Y – Y5) / (Y6 – Y5)).
12.5.4 Поверхности ухода на второй круг (Z). Критериями настоящего раздела
предполагается, что использование дополнительных зон разрешается в том случае, если система RNAV обладает способностью своевременного переключения на эффективное наведение по курсу при уходе на второй круг.
138
12.5.4.1 Поверхность промежуточного этапа ухода на второй круг (Zi). Поверхность начинается на уровне порога ВПП на расстоянии ХZi относительно порога
ВПП. Она заканчивается в первой точке, в которой достигается и поддерживается минимальный запас высоты, составляющий 50 м, и имеет номинальный градиент 2,5%.
При наличии доказательств возможности достижения градиентов набора высоты при уходе на второй круг, бóльших, чем номинальный градиент 2,5%, поверхность
Z и соответствующие боковые поверхности могут быть скорректированы для градиентов 3, 4 и 5%.
Поверхность ограничивается в горизонтальной плоскости основной зоной
LNAV. Нижние/внутренние края примыкающих боковых поверхностей определяются
границами основной зоны ухода на второй круг LNAV, а внешние края – краями дополнительных зон LNAV, расположенными на высоте 30 м над поверхностью промежуточного этапа ухода на второй круг (Zi) (рис. 12.8).
Удаление точки начала поверхности Zi (XZi) от порога ВПП определяется следующим образом:
XZi = (MOC –Hо.т.) / tg VPA – ATT – d – X + (MOC – 30) / tg Z,
где
XZi – начало поверхности промежуточного этапа ухода на второй круг;
MOC – запас высоты на конечном участке захода на посадку;
Hо.т. – относительная высота опорной точки траектории в вертикальной
плоскости;
АТТ – допуск вдоль линии пути;
tg Z – градиент поверхности ухода на второй круг (2,5%; возможны дополнительные значения 3, 4 и 5%);
d – время реакции пилота;
X – переходное расстояние.
139
12.5.4.2 Поверхность конечного этапа ухода на второй круг (Zf). Поверхность
начинается в первой точке, в которой может достигаться и поддерживаться запас высоты, равный 50 м. В этой точке и после нее она определяется как поверхность с началом
на уровне порога ВПП на удалении XZf относительно порога ВПП. Заканчивается поверхность в месте окончания участка APV.
Номинальный градиент поверхности составляет 2,5%.
При наличии доказательств возможности достижения бóльших градиентов набора высоты при уходе на второй круг, чем номинальный градиент 2,5%, поверхность
Z и соответствующие боковые поверхности могут быть скорректированы с учетом поверхности промежуточного этапа ухода на второй круг для градиентов 3, 4 и 5%.
Поверхность ограничивается по горизонтали основной зоной LNAV. Нижние/внутренние края примыкающих боковых поверхностей определяются границами
основной зоны ухода на второй круг LNAV, а внешние края – краями дополнительных
зон LNAV, расположенными на высоте 50 м над поверхностью конечного этапа ухода
на второй круг (Zf) ( рис. 12.8).
Удаление точки начала поверхности Zf (XZf) от порога ВПП определяется следующим образом:
XZf = (MOC – Но.т.) / tg VPA – ATT – d – X + (MOC – 50) / tg Z.
Участок APV заканчивается в MAPt, если разворот предписывается в MAPt,
MATF или MAHF, в зависимости от того, какая из этих точек достигается раньше.
12.6 ОПРЕДЕЛЕНИЕ OCH ДЛЯ ПРЕПЯТСТВИЙ ЗАХОДА НА ПОСАДКУ И
УХОДА НА ВТОРОЙ КРУГ
12.6.1 Минимальный запас высоты над препятствиями (MOC). Минимальный
запас высоты над препятствиями на конечном участке захода на посадку составляет 75
м. Это значение увеличивается в соответствии с п.2.2.3 для схем, предназначенных для
районов горных аэродромов.
140
Минимальный запас высоты над препятствиями при уходе на второй круг составляет 30 м для промежуточного и 50 м для конечного этапов ухода на второй круг.
Этот допуск предусматривается при построении поверхностей Zi и Zf, которые начинаются в ХZi и XZf.
12.6.2 Препятствия захода на посадку и ухода на второй круг. Учитываются
препятствия, которые выступают за APV-OAS. Они подразделяются на препятствия
захода на посадку и препятствия ухода на второй круг.
Самым простым является метод дальностей: препятствиями захода на посадку
являются те, которые располагаются между FAP и ХZi, а препятствиями ухода на второй круг являются те, которые расположены за ХZi. Однако в некоторых случаях такой
подход может привести к чрезмерному проигрышу из-за определенных препятствий
ухода на второй круг. Препятствиями ухода на второй круг могут считаться те, которые выступают за плоскость, параллельную поверхности вертикальной траектории с
началом в ХZi (рис. 12.9), т. е. препятствия, относительная высота которых больше, чем
[(ХZi + х) tg VPA].
12.6.3 Расчет OCH в пределах участка АРV. При отсутствии пересечений APVOAS OCH определяется нижним пределом 75 м или 90 м (12.2.2).
Если APV-OAS пересекаются, MOC (при необходимости, корректируется с учетом пересечения боковых поверхностей) добавляется к относительной высоте самого
высокого препятствия захода на посадку или к скорректированной относительной высоте самого большого превышения препятствия ухода на второй круг, в зависимости
оттого, что больше. Эта величина становится OCH.
Сначала определяется относительная высота самого высокого препятствия захода на посадку, выступающего за FAS или горизонтальную плоскость. Затем относительные высоты всех препятствий ухода на второй круг уменьшаются до относительных высот эквивалентных препятствий захода на посадку по приведенной ниже формуле:
141
hma ctg Z + (X – Xz)
ha = -------------------------,
ctg z + ctg VPA
где ha – относительная высота эквивалентного препятствия захода на посадку;
hma – относительная высота препятствия ухода на второй круг;
ctg Z – котангенс угла поверхности Z;
ctg VPA – котангенс VPA;
Xz – соответственно начало поверхности промежуточного этапа ухода на
второй круг (Zi) или поверхности конечного этапа ухода на второй
круг (Zf) относительно порога ВПП (положительное значение до,
отрицательное значение после него);
X – расстояние препятствия от порога ВПП (положительное значение до,
отрицательное значение после него).
При расчете OCH конечного участка значение MOC может быть скорректировано с учетом препятствий, выступающих за боковые поверхности, следующим образом:
MOC = min {MOC; MOC x (1 – y/W)},
где у – расстояние от края основной зоны до препятствия, измеренное перпендикулярно номинальной линии пути;
W – ширина боковой поверхности.
OCH конечного участка захода на посадку, начального и промежуточного эта-
пов ухода на второй круг определяется посредством добавления MOC к относительной
высоте самого высокого препятствия захода на посадку (реального или эквивалентного):
OCH = ha + MOC.
Пересчитывается ha для препятствий, выступающих за поверхность конечного
этапа ухода на второй круг (Zf) и определяется OCH для этих препятствий. Если OCH
больше, чем уже рассчитанные значения, необходимо либо ввести коррекцию на разворот или местоположение контрольной точки ожидания, либо увеличить OCH до нового значения.
142
Рис. 12.1. Зона баро-VNAV: вид APV-OAS в плане
143
Рис. 12.2. Баро-VNAV:вид в профиль
Рис.12.3. Изображение поверхностей APV-OAS
144
Рис. 12.4. Поверхность конечного участка захода на посадку
с применением VNAV и минимальной VPA
Рис.12.5. Вид поверхности оценки препятствий сбоку для
защиты воздушных судов, оборудованных вертикальной угловой шкалой
145
Рис.12.6. Вид поверхности оценки препятствий в плане
для защиты воздушных судов, оборудованных вертикальной угловой шкалой
Рис. 12.7. Расчет высоты поверхности
146
Рис.12.8. Расчет XZ
Рис.12.9. Расчет ha по hma
147
13 СХЕМЫ ТОЧНОГО ЗАХОДА НА ПОСАДКУ С ИСПОЛЬЗОВАНИЕМ НАЗЕМНОЙ СИСТЕМЫ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ GBAS
13.1 ОБЩИЕ ПОЛОЖЕНИЯ
Критерии GBAS основаны на критериях ILS и связаны с эксплуатационными
характеристиками и параметрами целостности наземного и бортового оборудования,
необходимыми для выполнения эксплуатационных требований категории I. Пример
специальных определений, используемых в настоящем разделе, приведен на рисунке
13.1.
Примечание. Поскольку специальные критерии категории I GBAS еще разрабатываются, критерии, содержащиеся в настоящем разделе, основываются на методе подобия категории I ILS.
Рис. 13.1. Иллюстрация определений
148
13.2 ПОСТРОЕНИЕ СХЕМ
Схема в пределах от полета по маршруту до конечного участка захода на посадку и на конечном этапе ухода на второй круг с использованием GBAS соответствует
общим критериям расчета схем. Различия имеют место в физических требованиях к
точному участку GBAS, который включает конечный участок захода на посадку, а
также начальный и промежуточный этапы участка ухода на второй круг. Эти требования
связаны
с
эксплуатационными
характеристиками
системы
GBAS
категории I.
13.3 СТАНДАРТНЫЕ УСЛОВИЯ
Ниже приведен перечень стандартных допущений, принятых при разработке
схем. В соответствующих случаях предусматривается необходимая их корректировка.
1. Максимальные размеры воздушных судов приведены в таблице 13.1.
Таблица 13.1. Максимальные размеры воздушных судов, используемые
при расчёте минимальных безопасных высот пролёта препятствий (OCA/H)
для захода на посадку по GBAS
Категория воздушного судна
Размах крыла, м
Вертикальное расстояние между траекториями
колес и глиссадной антенны, м
Н
30
3
А, В
60
6
С, D
65
7
DL
80
8
Примечание 1. При необходимости публикуется OCA/H для воздушных судов
категории DL.
Примечание 2. Указанные размеры охватывают существующие типы воздушных судов. Они выбраны для упрощения расчетов OCA/H и опубликования минимумов, связанных с категорией воздушных судов.
2. Градиент набора высоты при уходе на второй круг: 2,5%.
149
3. Курсовая ширина GBAS: 210 м у порога ВПП.
4. Угол наклона глиссады:
- минимальный/оптимальный: 3,0°;
- максимальный: 3,5°;
5. Относительная высота опорной точки: 15 м.
6. Относительная высота всех препятствий отсчитывается от превышения порога ВПП. Должна быть указана величина волны геоида для каждого порога ВПП.
7. Дельта продольного смещения равняется 0.
13.4 ДАННЫЕ, КАСАЮЩИЕСЯ КОНЕЧНОГО УЧАСТКА ЗАХОДА НА ПОСАДКУ (FAS)
Конечный участок захода на посадку определяется данными, подготовленными
разработчиком схемы. Поэтому точность траектории полностью зависит от точности и
целостности первоначальных данных, касающихся ВПП, и расчетов, выполненных
разработчиком. Полное описание траектории, включая глиссаду, ширину сектора бокового наведения, сопряжение и все другие параметры, описывающие траекторию, производится разработчиком и не зависит от местоположения наземных средств. Параметры траектории разрабатываются с использованием геодезических и геометрических
расчетов, и эти параметры форматизируются в блок данных FAS в электронной среде.
Затем данные суммируются для выполнения контроля с использованием циклического
избыточного кода (CRC), а полный блок передается пользователям для обеспечения
гарантий в том, что целостность данных, полученных в рамках процесса, обеспечивает
возможность включения данных о траектории в систему GBAS для передачи в бортовые системы пользователей. Описание блока данных FAS приводится в Добавлении к
настоящему разделу.
13.5 МИНИМАЛЬНАЯ БЕЗОПАСНАЯ ВЫСОТА ПРОЛЕТА ПРЕПЯТСТВИЙ
ДЛЯ ЗАХОДА НА ПОСАДКУ (OCA/H)
Критерии GBAS позволяют рассчитать значение OCA/H для каждой категории
воздушного судна. В тех случаях, когда использованы статистические расчеты, значе-
150
ния OCA/H определены, исходя из значения риска столкновения с препятствиями
1 х 10-7, т. е. 1 на 10 млн. заходов на посадку, связанного с общим целевым уровнем
безопасности полетов. Значение OCA/H обеспечивает пролет препятствий от начала
конечного участка захода на посадку до конца промежуточного участка ухода на второй круг. Это значение является только одним из факторов, которые должны учитываться при определении относительной высоты принятия решения.
Используются три метода расчета OCA/H, которые в порядке их представления
предусматривают постепенное увеличение сложности механизма учета препятствий.
Предполагается соблюдение стандартных условий, за исключением тех случаев, когда
вносятся поправки на нестандартные условия.
Первый метод предусматривает использование перечня поверхностей, основанных на поверхностях ограничения препятствий при точном заходе на посадку, которые
называются основными поверхностями оценки препятствий.
Для учета препятствий при заходе на посадку по GBAS используются:
- поверхность захода на посадку;
- поверхность ухода на второй круг;
- поверхность зоны приземления;
- переходные поверхности.
Конфигурация и размеры основных поверхностей оценки препятствий соответствуют аналогичным поверхностям, которые используются для расчёта минимальных
безопасных высот пролёта препятствий для захода на посадку по РМС (ILS).
Второй метод предусматривает использование перечня поверхностей оценки
препятствий (OAS), которые располагаются над основными поверхностями оценки
препятствий и соответствуют дополнительным поверхностям оценки препятствий, используемым для расчётов минимальных безопасных высот пролёта препятствий для
захода на посадку по РМС (ILS).
Третий метод основан на использовании модели риска столкновения (CRM).
CRM использует в качестве входных параметров данные о всех объектах и позволяет
151
оценить для любого конкретного значения OCA/H как обусловленный индивидуальными препятствиями риск, так и суммарный риск, обусловленный всеми препятствиями.
Примечание 1. Пока не завершена разработка специальных, связанных с GBAS
распределений для существующей CRM, следует использовать существующую СRM
для ILS.
Примечание 2. CRM не учитывает характеристики вертолетов. CRM может использоваться для расчёта минимальных безопасных высот пролёта препятствий для захода на посадку вертолётов по GBAS, но при этом могут быть получены завышенные
значения OCA/H.
13.6 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
13.6.1 Начальный участок захода на посадку с использованием GBAS должен
обеспечивать вывод воздушного судна в пределах эксплуатационной зоны действия
GBAS на такую линию пути или такой курс, которые будут упрощать захват курса конечного участка захода на посадку. По этой причине общие критерии, которые применяются в отношении начального участка, дополняются или уточняются с учетом критериев настоящего раздела.
13.6.2 Установление линии пути начального участка захода на посадку. Угол
пересечения линии пути начального участка захода на посадку и линии пути промежуточного участка не должен превышать 90°. Для возможности захвата автопилотом курса конечного участка захода на посадку желательно, чтобы угол пересечения не превышал 30°.
В тех случаях, когда угол превышает 70°, определяются радиал, пеленг, данные
радиолокационного наведения, информация DМЕ или оборудования RNAV, обеспечивающие упреждение разворота на линию пути промежуточного участка, по крайней
мере, 4 км.
В тех случаях, когда угол превышает 90°, следует предусмотреть использование
обратной схемы, схемы типа «ипподром» или процедуры счисления пути.
152
13.6.3 Зона учёта препятствий. Зона соответствует общим критериям расчета
схем. Обязательным условием является расположение контрольной точки промежуточного участка захода на посадку (IF) в пределах зоны действия GBAS и, как правило,
на расстоянии не более 37 км от точки посадочного порога ВПП (LTP).
13.7 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
13.7.1 Промежуточный участок схемы на основе GBAS отличается от общих
критериев в том отношении, что:
- его направление совпадает с курсом конечного участка захода на посадку;
- его длина может уменьшаться;
- в некоторых случаях могут исключаться дополнительные зоны.
Общие критерии, которые применяются в отношении промежуточного участка,
дополняются или уточняются с учетом критериев настоящего раздела.
13.7.2 Установление линии пути промежуточного участка захода на посадку.
Направление промежуточного участка на основе схемы GBAS совпадает с курсом конечного участка захода на посадку.
13.7.3 Длина промежуточного участка. Оптимальная длина промежуточного
участка захода на посадку составляет 9,3 км. Этот этап должен позволять осуществить
захват курса конечного участка захода на посадку и вход в глиссаду.
Длина участка должна быть достаточной для того, чтобы воздушное судно до
захвата глиссады могло стабилизировать движение и выйти на курс конечного участка
захода на посадку, исходя из угла пересечения с курсом конечного участка захода на
посадку.
Минимальные значения расстояния между точкой выхода на курс конечного
участка захода на посадку и точкой входа в глиссаду указаны в таблице 13.2. Минимальные значения следует применять только в том случае, если используемое воздушное пространство является ограниченным. Максимальная длина участка определяется
требованием к тому, чтобы он полностью располагался в пределах зоны действия
153
GBAS. Это расстояние должно быть не более 37 км от точки посадочного порога ВПП
(LTP).
Таблица 13.2 Минимальное расстояние между точками выхода на
посадочный курс и точкой входа в глиссаду
Угол пересечения с курсом конечного участка
захода на посадку (о)
0–15
16–30
31–60
61–90
или в пределах схемы типа «ипподром» или
обратной схемы
Кат. А/В
(км)
2,8
3,7
3,7
3,7
Кат. С/D/DL
(км)
2,8
3,7
4,6
5,6
13.7.4 Зона учёта препятствий промежуточного участка захода на посадку.
Полная ширина зоны в начале промежуточного участка захода на посадку определяется полной шириной начального участка захода на посадку и равномерно сужается, становясь
равной
горизонтальному
расстоянию
между
поверхностями
X OAS в FAP.
Зона учета препятствий промежуточного участка захода на посадку разделена
на основную зону и расположенные с каждой ее стороны дополнительные зоны. Однако в том случае, когда на начальном участке захода на посадку используется прокладка
линии пути методом счисления, основная зона промежуточного участка простирается
на полную ширину и дополнительные зоны не применяются.
Основная зона определяется путем сопряжения основной зоны начального участка захода на посадку с зоной конечного участка захода на посадку (в FAP). В месте
сопряжения с начальным участком захода на посадку ширина каждой дополнительной
зоны равняется половине ширины основной зоны. Ширина дополнительных зон
уменьшается до нуля в месте сопряжения с поверхностями конечного участка захода
на посадку (рис.13.2).
В тех случаях, когда до захвата курса конечного участка захода на посадку предусматривается маневрирование по обратной схеме или схеме типа «ипподром», зона
учёта препятствий строится, как показано на рис. 13.3.
154
13.7.5 Запас высоты промежуточного участка захода на посадку. Запас высоты над препятствиями аналогичен запасу высоты, предусмотренному для захода на посадку по РМС (ILS).
Рис.13.2. Сопряжение зон промежуточного
и конечного участков захода на посадку
155
Если схема позволяет выполнять заход на посадку с прямой (воздушное судно
стабилизируется на линии посадочного курса до пересечения IF), не требуется учитывать препятствия в дополнительных зонах.
Рис. 13.3. Зона промежуточного участка захода на посадку. Заход на посадку
по GBAS с использованием обратной схемы или схемы «ипподром»
13.8 ТОЧНЫЙ УЧАСТОК
13.8.1 Точный участок схемы при использовании GBAS (рис. 13.4) совпадает по
направлению с курсом конечного участка захода на посадку и включает конечный участок снижения для выполнения посадки, начальный и промежуточный этапы ухода на
второй круг.
156
Рис. 13.4. Точный участок
13.8.2 Начало точного участка этапа захода на посадку. Точный участок этапа
захода на посадку начинается в контрольной точке конечного участка захода на посадку (FAP), которая определяется пересечением номинальной глиссады и высоты, установленной для промежуточного участка захода на посадку. Как правило, FAP не должна располагаться на расстоянии более 18,5 км от порога ВПП, если не обеспечивается
надлежащее наведение по глиссаде сверх минимума, предусмотренного стандартом на
оборудование.
13.8.3 Контрольная проверка глиссады. В местоположении FAP необходимо
предусмотреть контрольную точку, с тем, чтобы обеспечить возможность сравнения
данных индикатора глиссады и информации бортового высотомера.
13.8.4 Контрольная точка снижения. Контрольная точка снижения располагается в начале конечного участка захода на посадку, и она становится точкой конечного
участка захода на посадку, в которой минимальной запас высоты над препятствиями
(MOC) на промежуточном участке плавно сопрягается с точными поверхностями. Контрольная точка снижения, как правило, не должна располагаться на расстоянии более
18,5 км до порога ВПП, если не обеспечивается надлежащее наведение по глиссаде
сверх минимума, предусмотренного стандартом на оборудование.
Допуск на контрольную точку снижения не требуется учитывать вследствие
обеспечиваемой точности ее местоположения.
157
Препятствия, расположенные вблизи контрольной точки в зоне ограниченной
точными поверхностями, находящиеся ниже плоскости с градиентом 15%, не учитываются.
13.8.5 Уход на второй круг. Уход на второй круг начинается не ниже точки пересечения номинальной глиссады с высотой принятия решения (DA/H). Установленное
значение (DA/H) должно равняться или превышать OCA/H.
13.8.6 Конец точного участка этапа захода на посадку. Точный участок обычно заканчивается в точке, где начинается конечный этап ухода на второй круг, или в
точке, где поверхность набора высоты при уходе на второй круг, которая начинается на
расстоянии 900м за порогом ВПП, достигает относительной высоты 300м над порогом
ВПП, в зависимости от того, какая точка располагается ниже.
13.9 ПРИМЕНЕНИЕ МОДЕЛИ РИСКА СТОЛКНОВЕНИЯ (СRМ) ДЛЯ ОПЕРАЦИЙ С ИСПОЛЬЗОВАНИЕМ GBAS ДЛЯ РАСЧЕТА OCA/H НА ТОЧНОМ
УЧАСТКЕ ЗАХОДА НА ПОСАДКУ
Примечание. Предназначенная специально для GBAS методика применения
CRM в настоящее время разрабатывается.
CRM ILS представляет собой компьютерную программу расчета численных
значений вероятности столкновения с препятствиями заходящего на посадку по GBAS
воздушного судна, которые могут сравниваться с целевым уровнем безопасности полетов воздушных судов, выполняющих полеты с конкретным значением OCA/H.
Программа CRM ILS может использоваться для оценки операций по категории I
GBAS, пока не разработана специальная программа CRM GBAS. Описание программы
CRM ILS и инструкции по ее использованию, включая точный формат необходимых
входных данных и выходных результатов, приведены в документе ИКАО 9274-AN
«Руководство по использованию модели риска столкновения (CRM) для полётов по
ILS».
При необходимости выполнения статистических расчетов величина минимальной безопасной высоты пролета препятствий определяется, исходя из общего заданно-
158
го уровня безопасности, выраженного через риск столкновения с препятствиями, равный 1х10 -7 , т.е. 1 на 10 миллионов полетов.
Расчеты вероятности столкновения с препятствиями могут быть выполнены и в
том случае, если препятствия не пересекают дополнительные поверхности оценки препятствий, но их количество, высота и расположение относительно ВПП представляет
угрозу безопасности полетов.
В качестве входных данных для CRM требуется следующее:
- сведения об аэродроме: название, местоположение порога ВПП и ориентация
ВПП, превышение порога ВПП, данные о предшествующем участке;
- параметры GBAS: категория (только кат. 1), угол наклона глиссады, расстояние между GARP и LTP, курсовая ширина GBAS и относительная высота DCP;
- параметры ухода на второй круг: высота принятия решения (относительная
высота пролета препятствий) и точка разворота при уходе на второй круг;
- параметры воздушного судна: тип, относительная высота колес шасси (расстояние от антенны до нижней точки колес шасси) и полуразмах крыла, категория воздушного судна (А, В, С, D или DL) и градиент набора высоты при уходе на второй круг;
- данные о препятствиях: прямоугольные координаты относительно порога
ВПП, и относительные высоты препятствия над превышением порога ВПП. Для оценки плотности препятствий необходимо учитывать все препятствия.
Программа выдает значение общего (полного) риска столкновения с препятствиями воздушного судна при выполнении полета с заданным значением OCA/H и в
процессе ухода на второй круг. Используя различные варианты выходных данных,
можно также получать другую информацию.
Например, могут быть получены значения риска, связанные с индивидуальными
препятствиями, и эти значения риска могут быть представлены либо в зависимости от
удаления препятствий, либо в более удобной форме в порядке изменения величины
риска, с тем, чтобы пользователь мог сразу видеть, с какими препятствиями связаны
основные компоненты полного риска.
159
Пользователь путем повторных прогонов CRM с соответствующими параметрами может оценивать влияние на безопасность полетов любого изменения параметров; как правило, варьируется угол наклона глиссады или увеличивается/уменьшается
значение OCA/H. Рассчитанное значение сравнивается с установленным допустимым
уровнем риска (не хуже, чем 1 х 10-7 на заход на посадку), который соответствует общему целевому уровню безопасности полетов.
Определение OCA/H представляет собой процесс последовательного прогона
CRM с меняющимися значениями OCA/H до тех пор, пока рассчитанное значение риска не будет соответствовать целевому уровню безопасности полетов (т. е. лучше, чем 1
х 10-7 на заход на посадку).
13.10 УХОД НА ВТОРОЙ КРУГ ПОСЛЕ ТОЧНОГО ЭТАПА ЗАХОДА НА ПОСАДКУ (КОНЕЧНЫЙ ЭТАП УХОДА НА ВТОРОЙ КРУГ)
13.10.1 Критерии конечного участка ухода на второй круг основаны на критери-
ях ухода на второй круг после захода на посадку по РМС (ILS). Предусматриваются
некоторые отличия для учета специфических зон и поверхностей, связанных с точным
этапом схемы захода на посадку на основе GBAS, и возможного изменения OCA/H на
этом участке в зависимости от категории воздушного судна.
Точка отсчета, используемая для расчета расстояний и градиентов при определении высот пролета препятствий, называется точкой «начала набора высоты» (SOC).
Она определяется в соответствии с общими критериями. Построение зоны осуществляется с учетом навигационной системы, используемой при уходе на второй круг.
В тех случаях, когда наличие препятствий на конечном этапе ухода на второй
круг приводит к увеличению любого из значений OCA/H, рассчитанных для точного
участка захода на посадку, для поверхности ухода на второй круг может также устанавливаться дополнительный более высокий градиент с целью уменьшения значения
OCA/H.
160
13.10.2 Уход на второй круг по прямой. Точный участок захода на посадку заканчивается на удалении, где поверхность ухода на второй круг достигает высоты 300
м над LTP порога ВПП. Ширина поверхности на этом удалении определяет начальную
ширину зоны учёта препятствий конечного этапа ухода на второй круг, которая строится, как это показано на рис. 13.5. Дополнительные зоны отсутствуют.
Высота препятствия в зоне конечного этапа ухода на второй круг (рис.13.6)
должна быть меньше, чем
(OCA/H – НL ) + d0 tgZ,
где OCA/H – минимальная безопасная высота пролета препятствий точного
участка захода на посадку;
НL – потеря высоты при уходе на второй круг с учетом погрешности бортового высотомера. Эта величина равна соответствующему запасу, приведенному в
таблице 13.3. OCA/H и НL относятся к одной и той же категории воздушного судна;
do – измеряется от SOC параллельно линии пути ухода на второй круг по
прямой;
Z – угол между поверхностью ухода на второй круг и горизонтальной
плоскостью.
Рис. 13.5. Конечный участок ухода на второй круг по прямой
161
Таблица 13.3. Потеря высоты/запас по высотомеру (НL)
Категория воздушного судна
Запас при использовании радиовысотомера (м)
Запас при использовании
барометрического высотомера (м)
А
В
С
D
13
18
22
26
40
43
46
49
Если данное требование нельзя выполнить, для обхода соответствующего препятствия предусматривается разворот. В случае невозможности разворота увеличивается значение OCA/H.
Рис. 13.6. Запас высоты над препятствиями при уходе на второй круг по прямой
13.11 УХОД НА ВТОРОЙ КРУГ С РАЗВОРОТОМ
Выполнение разворотов может предусматриваться в заданной точке разворота
(ТР), на заданной высоте или «как можно раньше». Используемые критерии зависят от
162
расположения разворота относительно нормального окончания точного участка и заключаются в следующем.
13.11.1 Разворот после нормального окончания точного участка захода на посадку. Если выполнение разворота предусматривается после нормального окончания
точного участка захода на посадку, применяются общие критерии в части разворота на
заданной высоте со следующими исключениями:
- OCA/H заменяется на (OCA/H – НL);
- поскольку SOC связана с OCA/H, представляется невозможным получить высоту пролета препятствий с помощью способов, используемых при неточных заходах
на посадку, применяя независимую корректировку OCA/H или MAPt.
13.11.2 Разворот до нормального окончания точного участка захода на посадку. Если выполнение разворота предусматривается на заданной высоте менее 300 м над
порогом ВПП или в заданной точке разворота ТР таким образом, что ближняя точка
разворота ТР располагается в пределах удаления нормального окончания точного участка захода на посадку, применяются критерии, приведенные ниже.
Примечание. Поправки к местоположению заданной ТР или заданной высоте
разворота могут повлечь за собой перестроение соответствующих зон и пересчет высот
пролета препятствий. При этом могут быть исключены некоторые препятствия или добавлены новые препятствия. Таким образом, для получения минимального значения
OCA/H может потребоваться скорректировать заданную ТР или высоту разворота методом подбора.
13.11.3 Разворот на заданной высоте менее 300м над порогом ВПП. Применяются общие критерии в части разворота на заданной высоте с учетом уточнений или
изменений, содержащихся в настоящем разделе. Построение зоны начала разворота и
последующего разворота показано на рис. 13.7.
Точный участок захода на посадку заканчивается в ТР. Это позволяет рассчитать OCA/H для точного участка захода на посадку и (OCA/H – HL). Затем определяется SOC и рассчитывается высота разворота TNA/H по следующей формуле:
163
TNA/H= OCA/H –HL + dZ tg Z,
где
dz – горизонтальное расстояние от SOC до ТР;
OCA/H – OCA/H, рассчитанная для точного участка.
Если ТР совпадает с SOC, на карте дается примечание «разворот как можно
раньше на... (направление или навигационное средство)» и помещается достаточный
объем информации для определения местоположений и относительных высот препятствий, вызывающих необходимость разворота.
Зона начала разворота ограничивается 300-метровым контуром поверхности Y
категории I и заканчивается на удалении ТР.
Примечание. Ближняя ТР будет располагаться в начале 300-метрового контура
поверхности Y категории I (точка D"), если не указывается контрольная точка для ограничения ранних разворотов.
Зона разворота строится согласно общим критериям.
Высота препятствия в зоне начала разворота должна быть меньше, чем:
TNA/H – 50 м при разворотах более чем на 15о;
TNA/H – 30 м при разворотах на 15о или менее, за исключением того, что при
расчете высоты разворота не требуется учитывать препятствия, расположенные ниже
поверхности Y с внешней стороны разворота.
Высота препятствия в зоне разворота и далее должна быть меньше, чем
TNA/H + dо tg Z – MOC,
где do – измеряется от препятствия до ближайшей точки на границе зоны начала
разворота, а MOC составляет:
50 м при разворотах более чем на 15°;
30 м при разворотах на 15° или менее.
MOC – линейно уменьшается до нуля на внешней границе дополнительных зон,
если они имеются.
Если критерии, указанные выше, не могут быть выполнены, высота разворота
корректируется.
164
Это осуществляется двумя способами:
1. Корректировка высоты разворота без изменения OCA/H: это означает, что ТР
будет передвигаться, и соответственно будут изменяться зоны.
2. Увеличение высоты разворота за счет увеличения OCA/H: в результате этого
увеличивается высота разворота над той же ТР. Зоны разворота остаются неизменными.
Для защиты ранних разворотов в тех случаях, когда на опубликованной схеме
не указывается контрольная точка для ограничения разворотов воздушных судов, выполняющих уход на второй круг с большей, чем заданная высота разворота, выполняется дополнительная проверка препятствий.
В тех случаях, когда предусматривается выполнение разворота в заданной ТР и
ближняя ТР располагается до нормального окончания точного участка захода на посадку, точный участок захода на посадку заканчивается в ближней ТР. Это позволяет
рассчитать OCA/H для точного участка захода на посадку и (OCA/H – HL), затем определяется SOC.
Зона разворота строится согласно общим критериям в части разворота в заданной ТР, за исключением того, что она основывается на ширине 300-метровых контуров
поверхности Y OAS в ранней и поздней ТР (рис. 13.8).
Высота препятствия должна быть меньше, чем:
(OCA/H – НL) + dо tg Z – MOC,
где
do = dz + кратчайшее расстояние от препятствия до линии К-К;
dz – горизонтальное расстояние от SOC до ближней ТР.
MOC составляет:
50 м при разворотах более чем на 15°;
30 м при разворотах на 15° или менее.
Если высота препятствия превышает данное значение, необходимо увеличить
OCA/H или переместить ТР для получения необходимого запаса высоты.
165
Рис. 13.7. Разворот на заданной абсолютной высоте
166
Рис. 13.8. Разворот c заданной ТР (при наличии контрольной точки ТР)
167
ПРИЛОЖЕНИЕ А К РАЗДЕЛУ 13: ПОЯСНЕНИЕ ИНФОРМАЦИИ, ВВОДИМОЙ В ПОЛЯ ДАННЫХ БЛОКА ДАННЫХ FAS
Каждый блок данных FAS содержит 24 элемента (поля). 21 поле, включая поле
избыточных данных CRC, защищено с помощью CRC.
В пояснении дается описание начального процесса подготовки данных для
включения в блок данных FAS. Эти данные вводятся в программу, которая используется для расчета CRC.
1. Тип операции: цифра от 0 до 15, которая обозначает тип конечного участка
захода на посадку.
Правило кодирования: 0 – код для схемы захода на посадку с прямой. (Коды для
других схем зарезервированы для определения в будущем.)
2. Идентификатор поставщика обслуживания: цифра от 0 до 15, которая увязывает схему захода на посадку с конкретным поставщиком обслуживания спутниковой
системой захода на посадку. Для применения GBAS эти данные не учитываются.
3. Идентификатор аэропорта: четырехзначный код ИКАО аэродрома.
Пример: UUDD, UUMO
4. Номер ВПП: ВПП обозначается двумя знаками «RW», после которых следует
номер ВПП. При необходимости используется пятый знак для указания: левая (L), правая (R) или центральная (C).
Вертодромы обозначаются «HEL0» без номера (номер ВПП – 0, как используемый для расчета CRC).
Примеры: RW26R, RW 08L, RW18C, RW02, HEL0.
5. Определитель характеристик захода на посадку: цифра от 0 до 7, которая обозначает тип захода на посадку. «0» используется для обозначения схемы захода на посадку LPV, а «1» обозначает схему захода на посадку по категории I. Другие значения
зарезервированы для будущего использования.
Пример: 1 = категория 1.
168
6. Индикатор маршрута: один знак алфавита (Z – A или пробел, опуская I и O),
используемый для проведения различия между несколькими конечными участками захода на посадку на одну ВПП или вертодром. Первый конечный участок захода на посадку на ВПП обозначается «Z». Дополнительные знаки алфавита присваиваются по
нарастающей.
Пример: Z = первый конечный участок захода на посадку;
Y = второй конечный участок захода на посадку;
X = третий конечный участок захода на посадку.
7. Селектор данных опорной траектории (RPDS): цифра (0–48), которая позволяет бортовому оборудованию GBAS автоматически настраиваться на схему. Для
GBAS эта цифра увязывается с частотой ОВЧ-передачи данных и пятицифровым идентификатором настройки. Операции SBAS всегда кодируются как «0».
Пример: 1.
8. Идентификатор опорной траектории: четырехзначный идентификатор, который используется для подтверждения выбора правильной схемы захода на посадку.
Первый знак идентификатора обозначает систему, предоставляющую обслуживание (например, «G» GBAS), после чего следует номер ВПП. Последний знак, начиная с буквы «A», но исключая буквы «C», «L» и «R», будет использоваться для обозначения первой схемы, после чего следует очередная буква для каждой схемы на конкретную ВПП. Например, аэропорт имеет три параллельных ВПП, при этом на левой и
правой ВПП применяется схема захода на посадку с прямой и схема захода на посадку
со смещением, а на центральной ВПП применяется только схема захода на посадку с
прямой. Применимы (крайне редко) следующие примеры:
Пример: G09A & G09B будут определять два отдельных блока данных FAS для
ВПП 09L.
G09D будет использоваться для определения блока данных FAS для ВПП 09C.
G09E & G09F будут использоваться для определения блоков данных FAS для
ВПП 09R.
169
Примечание. Эти суффиксы не должны указываться в каком-либо определенном
порядке, для того чтобы на более позднем этапе можно было добавлять схемы без изменения существующих блоков данных FAS.
9. Точка посадочного порога ВПП (LTP)/точка фиктивного порога ВПП (FTP) –
широта: представляет широту порога ВПП, определенную в координатах ПЗ-90.02
(WGS-84) и введенную с точностью до пяти десятитысячных долей секунды дуги.
Пример обозначения широты:
225436.2125N (11 знаков) для 22°54'36,2125" N.
10. Точка посадочного порога ВПП (LTP)/точка фиктивного порога ВПП (FTP)
– долгота: представляет долготу порога ВПП, определенную в координатах ПЗ-90.02
(WGS-84) и введенную с точностью до пяти десятитысячных долей секунды дуги.
Пример обозначения долготы:
1093247.8780E (12 знаков) для 109°32'47,8780" E.
11. Высота LTP/FTP относительно эллипсоида (HAE): высота в метрах относительно поверхности референц-эллипсоида ПЗ-90.02 (WGS-84).
Первый знак представляет собой + или –, за которым следует значение разрешения в десятых долях метра, при этом десятичная точка опускается.
Пример: +00356 (+35,6м); –00051(–5,1м); +01566 (+156,6м); –00022 (–2,2м).
12. Точка выставления направления траектории полета (FPAP) – широта: эта
точка расположена на геодезической линии или продолжении геодезической линии,
рассчитанной между LTP и заданным центром противоположного порога ВПП. Она
расположена на определенном расстоянии от LTP для обеспечения предписанных углового расширения и курсовой ширины схемы, а также функциональных возможностей воздушного судна. Она используется вместе с LTP для определения бокового выставления вертикальной плоскости, включающей траекторию конечного участка захода
на посадку RNAV. На более коротких ВПП FPAP может располагаться вне взлетного
конца посадочной ВПП. Широта в FPAP ВПП определяется в координатах ПЗ-90.02
(WGS-84) и вводится с точностью до пяти десятитысячных долей секунды дуги.
170
Пример обозначения широты:
225436.2125N (11 знаков) для 22°54'36,2125" N.
13. FPAP – долгота: долгота FPAP ВПП определяется в координатах ПЗ-90.02
(WGS-84) и вводится с точностью до пяти десятитысячных долей секунды дуги.
Пример обозначения долготы:
1093247.8780E (12 знаков) для 109°32'47,8780" E.
14. Высота пересечения порога ВПП (TCH): заданная высота FAS над LTP (или
FTP), определенная в футах или метрах, как указывается в селекторе единиц ТСН.
Пример: 00015.0 (15,0 м).
15. Селектор единиц TCH: этот знак определяет единицы, используемые для
описания TCH.
Пример: F = футы, M = метры.
16. Угол наклона глиссады: угол траектории захода на посадку (глиссады) относительно горизонтальной плоскости, определенной в соответствии с ПЗ-90.02 (WGS84) в LTP/FTP. Он указывается с точностью до сотых долей градуса.
Пример: 02.75 (2,75°), 03.00 (3,00°).
17. Курсовая ширина на пороге ВПП: половина ширины (в метрах) курса бокового наведения в LTP/FTP, определяющая боковое смещение, при котором приемник
будет обеспечивать отклонение на полную шкалу. В комбинации с расстоянием до
FPAP курсовая ширина определяет чувствительность боковых отклонений в процессе
захода на посадку. Допустимые значения варьируются от 80 м до 143,75 м.
Значение курсовой ширины на пороге ВПП округляется до ближайших 0,25 м.
Пример:105.00.
18. Смещение Δ-расстояния: расстояние от дальнего конца ВПП до FPAP. Оно
определяет место, где чувствительность бокового наведения изменяется на чувствительность ухода на второй круг. Оно выражается в метрах в пределах от 0 до 2032 м.
Значение фактического расстояния округляется до ближайшего значения, кратного 8.
171
Если FPAP расположена в заданном центре противоположного конца ВПП, это расстояние равно нулю.
Пример: 0000, 0424.
Пример: VAL 50.0, VAL 12.0.
19. Избыточные данные CRC точки траектории точного захода на посадку:
восьмизначное шестнадцатеричное представление рассчитанных битов избыточных
данных, используемых для определения целостности информации блока данных FAS
во время передачи и хранения. Эта информация будет рассчитываться электронными
средствами с использованием программы электронной передачи (программное обеспечение блока данных FAS) и надлежащим образом оформляться документально.
Элементы основных данных для разработчика схем
и рекомендации по выбору параметров
Основными данными, необходимыми для определения FAS с точки зрения построения схемы, являются:
- широта, долгота и высота над/под эллипсоидом ПЗ-90.02;
- широта и долгота FPAP, а также смещение между FPAP и LTP/FTP, называемое Δ FPAP (широта и долгота);
- относительная высота точки пересечения порога ВПП при заходе на посадку
над LTP/FTP (ТСН). Для стандартных ВПП при построении траекторий следует использовать относительную высоту пересечения порога ВПП, равную 15 м. На ВПП,
оборудованных ILS, значение TCH обычно соответствует значению, опубликованному
для схемы ILS;
- угол наклона глиссады. Угол наклона глиссады должен соответствовать показаниям PAPI или VASI и, как правило, составляет 3º. На ВПП, оборудованных ILS,
обычно желательно совместить GPA с глиссадой ILS для обеспечения выравнивания
по направлению с существующими светосигнальными системами и соответствия двух
систем захода на посадку. При отсутствии огней или ILS рекомендуемый угол наклона
глиссады составляет 3º. Заходы на посадку с более крутым углом наклона глиссады
172
могут устанавливаться в случае необходимости обеспечения пролета препятствий или
соблюдения требований воздушного пространства, однако не должны приводить к скорости снижения любого воздушного судна более 5 м/сек;
- курсовая ширина на пороге ВПП. Значение половины курсовой ширины, как
правило, составляет 105 м для обеспечения подобия схемам ILS;
- расстояние от конца ВПП до FPAP (смещение Δ-расстояния).
После определения FPAP можно рассчитать Δ FPAP и смещение Δ-расстояния.
173
14 МАРШРУТНЫЕ СХЕМЫ
14.1 ОБЩИЕ ПОЛОЖЕНИЯ
В настоящем разделе приведены маршрутные критерии для RNAV 5, RNP 4,
RNAV 2 и RNAV 1.
Как правило, маршрут состоит из нескольких участков. Каждый участок начинается и заканчивается в заданной контрольной точке.
14.2 ЗОНА УЧЕТА ПРЕПЯТСТВИЙ
Зона учета препятствий строится для прямолинейного участка и для разворота.
На маршруте с применением RNAV используется только разворот в точке пути
«флай-бай».
14.2.1 Прямолинейный участок. Зона учета препятствий на прямолинейном участке имеет постоянную ширину и состоит из центральной основной и двух боковых
дополнительных зон. Ширина основной и дополнительной зон постоянна.
Ширина зоны учета препятствий определяется в соответствии с допусками, относящимися к навигационной системе, на основе которой построены маршруты зональной навигации:
- для базовой GNSS в соответствии с разделом 4;
- для DME/DME в соответствии с разделом 5;
- для VOR/DME в соответствии с разделом 6.
В таблице 14.1 представлены значения ХТТ, АТТ и половины ширины зоны
(½ W) в зависимости от навигационной спецификации и навигационной системы.
174
Таблица 14.1.
RNAV 5
XTT=4,65 км,
АТТ =3,72 км
½W=10,69 км
XTT=6,11 км,
АТТ=3,98 км, ½W=12,86 км
GNSS
RNAV 1,2
XTT=3,70 км,
АТТ= 2,96 км,
½W=9,26 км
DME/DME
RNAV 2
RNAV 1
XTT=2,79 км,
АТТ=2,09 км,
½W=7,90 км
RNP 4
XTT=7,41 км,
АТТ= 5,93 км, ½W=14,82 км
–
XTT=2,29 км,
АТТ=2,09 км,
½W=7,14 км.
XTT=1,45 км,
АТТ=1,12 км,
½W=5,88 км –
(при ипользовании более 2х
DME)
VOR/DME
–
XTT, АТТ= таблица 6.1
½W=1,5ХТТ + 3,7 км
–
14.2.2 Участок разворота. При полетах по маршруту с применением RNAV допускается только разворот в точке пути «флай-бай».
Построение зоны защиты разворота и оценка препятствий производится в соответствии с разделом 8.
14.3 ЗАПАСЫ ВЫСОТЫ
Значение минимального запаса высоты над препятствиями (MOC) в основной
зоне на этапе полета по маршруту составляет 300 м. В горной местности (MOC) увеличивается в зависимости от изменения превышения местности, как указано в таблице
14.2.
Таблица 14.2. Значение запаса высоты для этапа полета по маршруту
Превышение
Превышение 900 м – 1500 м
Более 1500 м
MOC
450 м
600 м
175
В дополнительной зоне запас высоты над препятствиями линейно уменьшается
от полного запаса у внутреннего края до нуля у внешнего края.
14.4 МИНИМАЛЬНАЯ АБСОЛЮТНАЯ ВЫСОТА ПРОЛЕТА ПРЕПЯТСТВИЙ
(MOCA)
Для каждого участка маршрута определяется и публикуется минимальная абсолютная высота пролета препятствий (MOCA). MOCA обеспечивает требуемый минимальный запас (MOC) над препятствиями внутри зон пролета препятствий.
14.5 МИНИМАЛЬНАЯ АБСОЛЮТНАЯ ВЫСОТА ПОЛЕТА ПО МАРШРУТУ
(МЕА)
Минимальная абсолютная высота полета по маршруту (MEA) определяется в
координации с органами ОВД и публикуется для каждого участка маршрута. МЕА
должна соответствовать:
- минимальной абсолютной высоте пролета препятствий (MOCA);
- минимальной абсолютной высоте, обеспечивающей надлежащий прием сигналов соответствующих средств;
- минимальной абсолютной высоте, обеспечивающей надлежащий прием сообщений органов ОВД;
- минимальной абсолютной высоте, которая соответствует структуре ОВД,
в зависимости от того, что больше.
Для целей планирования и определения минимальной абсолютной высоты,
обеспечивающей надлежащий прием сигналов соответствующих средств, может использоваться ниже приведенная формула:
D = 4,13√H,
где
D – расстояние в километрах;
Н – минимальная относительная высота в метрах.
176
15 СХЕМЫ ЗАХОДА НА ПОСАДКУ ДО ТОЧКИ В ПРОСТРАНСТВЕ (PINS) С
ПРИМЕНЕНИЕМ ЗОНАЛЬНОЙ НАВИГАЦИИ (RNAV) ДЛЯ ВЕРТОЛЕТОВ,
ИСПОЛЬЗУЮЩИХ ПРИЕМНИКИ БАЗОВОЙ GNSS
15.1 ОБЩИЕ ПОЛОЖЕНИЯ
15.1.1 В настоящем разделе представлены специальные критерии построения
схем захода на посадку с применением зональной навигации (RNAV) на основе приемников базовой GNSS для использования только вертолетами. Эти схемы обозначаются
буквой Н и определяют категорию ВС как категорию Н. В отношении схем захода на
посадку на основе базовой GNSS используются общие критерии, изложенные в разделах 2, 3, 7, 8, 9, 10, 11, дополненные и измененные согласно критериям настоящей главы.
15.1.2 Для целей построения схем захода на посадку только для вертолетов
применяются специальные критерии, отличные от критериев, применяемых для ВС категории А. В таблице 15.1 представлены критерии, используемые для построения схем
захода на посадку только для вертолетов.
Таблица 15.1. Отдельные критерии для построения схем захода на посадку
только для вертолетов
Наименование критериев
Скорость на начальном/промежуточном участках захода на посадку, км/ч
Скорость на конечном участке захода на посадку, начальном этапе ухода на второй круг, км/ч
Скорость на промежуточном и конечном этапе
ухода на второй круг, км/ч
Максимальный градиент снижения на конечном
участке захода на посадку, %
Минимальный запас высоты над препятствиями
на конечном этапе ухода на второй круг, м
Градиент набора высоты при уходе на второй
круг, %
Градиент в контрольной точке ступенчатого
снижения, %
Значение, используемое для вертолетов
( категория Н) min/max
165/220
130/165
130/165
10
40
4,2
15 – 25
177
15.1.3 Данные схемы захода на посадку предназначены для вертолетов, оборудованных базовой GNSS, имеющих разрешение на выполнение полетов на основе RNP
APCH.
15.2 МАРШРУТЫ ПРИБЫТИЯ
15.2.1 При построении схем используются общие критерии, представленные в
разделе 11.
В таблице 15.2 представлены значения XTT, ATT и половины ширины зоны для
этапа прибытия в зависимости от расстояния от вертодрома на основе Basic RNP-1.
Таблица 15.2. XTT, ATT и половина ширины зоны для Basic RNP-1
на этапе прибытия (км)
XTT
1,85
STAR
(>56 км от KTВ)
ATT
1,48
½W
4,63
XTT
1,85
STAR
(<56 км от KTВ)
ATT
1,48
½W
4,07
15.2.2 Минимальная высота в секторе рассчитывается в соответствии с общими
критериями, за исключением того, что устанавливается только один сектор для использования с любого направления. Центром этого сектора является опорная точка захода
на посадку до точки в пространстве (PRP/MAPt). PRP/MAPt должна быть предусмотрена в базе данных в качестве контрольной точки, предназначенной для той же цели,
что и КТА при заходах на посадку на аэродромы. При использовании абсолютной высоты прибытия в район вертодрома применяются положения раздела 10.
15.3 КРИТЕРИИ В РАЙОНЕ ВЕРТОДРОМА
15.3.1 В качестве основной используется T/Y-образная конфигурация схем захода на посадку, которая обеспечивает гибкость и стандартизацию при построении
схем.
15.3.2 Начальный и промежуточный участки имеют минимальную длину, которая обеспечивает дистанцию разворота/минимальное расстояние стабилизации. Длина
составляющей разворота представляет собой минимальное расстояние стабилизации
178
для разворота на соответствующий угол в IAF и IF и может быть определена с использованием данных таблиц 7.7 – 7.10.
15.3.3 Внешняя граница зон разворота строится с использованием спирали ветра
или ограничивающих окружностей, получаемых с учетом воздействия на идеальную
траекторию полета ветра с любого направления. Для обеспечения защиты воздушного
судна в требуемом диапазоне скоростей внешняя граница основной зоны продолжается, как это показано на рис. 15.1, и в пределах разворота предусматривается постоянная
дополнительная зона.
15.3.4 Допуски на контрольные точки и значения полуширины зон для приемников базовой GNSS представлены в таблице 15.3.
Таблица 15.3. ХТТ, АТТ и половина ширины зоны для RNP АРСН
на начальном, промежуточном, конечном участках захода на посадку
и этапе ухода на второй круг (км)
IF/IAF/уход на второй
круг (<56 км от КТА)
XTT
АТТ ½ W
1,85
1,48
4,07
FAF
XTT
0,56
АТТ ½ W
0,44 2,13
MAPt
XTT
0,56
АТТ
0,44
½W
1,48
Уход на второй круг
(<28км от КТА)
XTT
АТТ ½ W
1,85
1,48
3,43
15.4 НАЧАЛЬНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
15.4.1 Начальный участок захода на посадку начинается в IAF и заканчивается в
IF.
15.4.2 Угол, образуемый линией пути начального участка захода на посадку и
линией пути промежуточного участка не должен превышать 120°.
15.4.3 Построение зон учета препятствий начального, промежуточного и конечного участков захода на посадку и их сопряжение показано на рисунке 15.1 и 15.2.
15.4.4 Длина начального участка захода на посадку не должна превышать
18,52 км, если, исходя из требований эксплуатации, более длинный участок не является
необходимым. IAF формируется в пределах 46,30 км от PRP. Минимальная длина определяется величиной необходимого разворота в IAF. Начальный участок захода на
179
посадку рассчитывается для вертолетов, выполняющих полет по схеме со скоростями
до 220 км/ч. В тех случаях, когда это диктуется соображениями эксплуатации, этот
участок может быть рассчитан на воздушные скорости не более 165 км/ч. В этом случае на схеме захода на посадку приводится примечание: «Скорость ограничена
165 км/ч».
15.4.5 Половина ширины зоны определяется в соответствии с таблицей 15.3.
15.4.6 В основной зоне требуемый запас высоты над препятствиями составляет
300 м, запас равномерно уменьшается от кромки основной зоны до нуля на внешней
кромке дополнительной зоны.
180
Рис.15.1. Начальный, промежуточный и конечный участки захода на посадку
181
Рис. 15.2. Сопряжение конечного и промежуточного участков захода на посадку
15.4.7 Оптимальный градиент снижения составляет 6,5%. В тех случаях, когда
требуется больший градиент снижения, рекомендуемый максимум составляет 10%.
Однако, когда это диктуется соображениями эксплуатации, может разрешаться градиент вплоть до 13,2% при условии, что скорость ограничивается до максимума IAS 165
км/ч и используемый градиент указывается на картах захода на посадку.
15.5 ПРОМЕЖУТОЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
15.5.1 Промежуточный участок захода на посадку начинается в IF и заканчивается в FAF. Точку IF рекомендуется задавать точкой пути «флай-бай». Может быть использована точка пути «флайовер», если это необходимо по условиям эксплуатации.
Точка FAF всегда определяется точкой пути «флай-бай», даже если нет разворота над
FAF.
15.5.2 Рекомендуется устанавливать промежуточный участок захода на посадку
на продолжении линии конечного участка захода на посадку. Допускается устанавливать разворот в точке FAF. При этом угол разворота не должен превышать 60°.
182
15.5.3 Построение зоны учета препятствий и сопряжение зон промежуточного и
конечного участков захода на посадку показано на рисунке 15.2.
15.5.4 Оптимальная длина промежуточного участка захода на посадку равна
5,56 км. Минимальная длина определяется величиной разворота в IF и составляет 3,70
км. Максимальная длина промежуточного участка не должна превышать 18,52 км. При
определении минимальной дистанции стабилизации для вертолетов используются скорости до 220 км/ч. В тех случаях, когда это диктуется условиями эксплуатации, этот
участок может быть рассчитан на воздушные скорости не более 165 км/ч. В этом случае схема захода на посадку сопровождается примечанием «Скорость ограничена 165
км/ч».
15.5.5 Половина ширины зоны определяется в соответствии с таблицей 15.3.
Зона учета препятствий простирается от самой ранней IF до номинального расположения FAF. В основной зоне запас высоты над препятствиями составляет
150 м, который равномерно уменьшается от внешней границы основной зоны до нуля
на внешней границы дополнительной зоны.
15.5.6 Оптимальным является горизонтальное расположение промежуточного
участка. Если необходимо снижение, максимально допустимый градиент составляет
10%. В тех случаях, когда это необходимо, может допускаться значение градиента до
13,2% при условии, что скорость ограничивается до максимума IAS 165 км/ч и используемый градиент указывается на картах захода на посадку. Градиент снижения рассчитывается в соответствии с п. 9.2.4.
15.6 КОНЕЧНЫЙ УЧАСТОК ЗАХОДА НА ПОСАДКУ
15.6.1 Конечный участок захода на посадку начинается в FAF и заканчивается в
MAPt. Точка FAF определяется точкой пути «флай-бай». Tочка MAPt – точкой пути
«флайовер». Все заходы на посадку выполняются до точки в пространстве, в которой
пилот должен иметь достаточный визуальный контакт с ориентирами для продолжения
захода на посадку и посадки в намеченном месте посадки или начать уход на второй
круг.
183
15.6.2 Применительно к заходам на посадку до точки в пространстве, требования в отношении выравнивания конечного участка отсутствуют.
15.6.3 Зона учета препятствий начинается на границе самой ранней FAF и заканчивается на уровне номинального местоположении MAPt. В основной зоне запас
высоты над препятствиями составляет 75 м, который равномерно уменьшается от
внешней границы основной зоны до нуля на внешней границы дополнительной зоны.
Построение зоны представлено на рисунке 15.2.
15.6.3.1 Оптимальная длина составляет 5,92 км. Минимальная длина определяется величиной необходимого разворота в FAF. Схемы обычно рассчитываются применительно к вертолетам, выполняющим заходы на посадку со скоростями до 130 км/ч.
В особых случаях, когда конечный участок может быть рассчитан на использование
скоростей вплоть до 165 км/ч, уход на второй круг также должен быть рассчитан на
использование скорости 165 км/ч. Максимальная скорость, на которую рассчитываются конечный участок захода на посадку и участок ухода на второй круг, должна быть
указана на карте захода на посадку.
15.6.3.2 Половина ширины зоны определяется в соответствии с таблицей 15.3.
15.6.4 Оптимальный градиент снижения составляет 6,5%. В тех случаях, когда
требуется больший градиент снижения, рекомендуемый максимум составляет 10%.
Однако в тех случаях, когда это диктуется соображениями эксплуатации, и угол разворота в FAF составляет 30° или менее, может разрешаться градиент вплоть до 13,2% при
условии, что скорость ограничивается до максимума IAS 130 км/ч и используемый
градиент указывается на картах захода на посадку. Градиент на конечном участке захода на посадку рассчитывается от заданной высоты в местоположении FAF на схеме
до OCA/H в указанном на схеме местоположении MAPt.
184
15.7 УЧАСТОК УХОДА НА ВТОРОЙ КРУГ
15.7.1 Участок ухода на второй круг начинается в местоположении самой ранней MAPt (флайовер) и заканчивается в точке ожидания, определяемой MAHF (флайовер), или в указанном службой УВД пункте. Оптимальным маршрутом является полет
прямо по курсу с целью прямого входа в схему ожидания в MAHF.
15.7.2 Продольный допуск на местоположение MAPt рассчитывается согласно
п. 2.3.
15.7.3 Расчет начала набора высоты (SOC) производится в соответствии с п. 2.3.
Следует обратить внимание на то, что переходный допуск (X) представляет собой расстояние, которое пролетает вертолет за 5 с полета со скоростью 130 км/ч или
165 км/ч, переведенной в TAS.
15.7.4 Зона ухода на второй круг начинается в раннем продольном допуске на
MAPt и имеет ширину, равную зоне конечного участка захода на посадку в этом местоположении. От этой границы зона расширяется под углом 15° с каждой стороны
курса ухода на второй круг до достижения полной ширины ±3,43 км (4,07 км). Если
первая точка пути достигается до того, как ширина зоны становится равной ±3,43 км
(4,07 км), расширение продолжается до ширины ±3,43 км (4,07 км).
15.7.5 При уходе на второй круг по прямой применяются общие критерии раздела 11, определяющие уход на второй круг по прямой. Наведение по линии пути при
уходе на второй круг обеспечивается путем установления контрольной точки по GNSS.
15.7.6 При уходе на второй круг с разворотом применяются общие критерии
раздела 8, определяющие уход на второй круг с разворотом. Для построения границы
основной зоны применяется спираль ветра или ограничивающие окружности, а внешняя граница дополнительной зоны строится путем присоединения зоны постоянной
ширины. Для схем ухода на второй круг с использованием приемников GNSS, которые
не обеспечивают постоянное наведение по линии пути после MAPt, зона учета препятствий строится в соответствии с рисунками 15.3 и 15.4.
185
Уход на второй круг с разворотом с указанной линией пути к точке MAHF может применяться при наличии систем, обеспечивающих постоянное наведение по линии пути после точки пути ухода на второй круг, а схема захода на посадку должна сопровождаться четким примечанием. Построение зоны учета препятствий показано на
рисунке 15.5.
186
Рис. 15.3. Уход на второй круг с разворотом
187
Рис.15.4. Уход на второй круг с разворотом на угол, превышающий 900
188
Рис.15.5. Уход на второй круг с разворотом на угол,
меньший или равный 900
189
15.7.7 Приборная скорость на конечном участке ухода на второй круг составляет 165 км/ч. Однако в тех случаях, когда при выполнении полета требуется обход препятствий, могут использоваться уменьшенные скорости вплоть до 130 км/ч, при этом
на схеме указывается: «Разворот при уходе на второй круг ограничен максимальной
скоростью 130 км/ч».
Ограничение воздушной скорости при уходе на второй круг действует до тех
пор, пока вертолет не выйдет на курс приближения к точке пути ожидания при уходе
на второй круг или не достигнет границы запаса высоты над препятствиями.
15.7.8 Максимальный угол расхождения линии пути приближения с линией пути удаления в MATF составляет 120°.
15.7.9 В тех случаях, когда при выполнении полета требуется обход препятствий, может использоваться MATF. В этом случае необходимо, чтобы после SOC учитывалась минимальная дистанция стабилизации для точки разворота. Минимальная
длина участка после разворота определяется величиной минимальной дистанция стабилизации, которая необходима на участке удаления в соответствии с разделом 7.
15.7.10 Градиент набора высоты поверхности ухода на второй круг составляет
4,2% (24:1). В тех случаях, когда это диктуется соображениями эксплуатации, могут
использоваться более высокие градиенты. Когда при построении схемы ухода на второй круг используется градиент, отличающийся от номинального градиента, требуемый градиент должен быть указан на карте захода на посадку по приборам. В дополнение к значению OCA/H для указанного градиента должно быть также указано значение
OCA/H для номинального градиента.
15.7.11 При разворотах более чем на 15° запас высоты составляет 40 м.
15.8 ВИЗУАЛЬНЫЙ УЧАСТОК
15.8.1 Визуальный участок соединяет точку в пространстве (PinS) с местом посадки. Им может быть прямой визуальный участок и участок, выполняемый посредством маневрирования. В настоящем подразделе даны критерии построения прямого визуального участка.
190
15.8.2 Прямой визуальный участок (VS). Прямой VS соединяет точку PinS с местом посадки; это соединение может осуществляться либо по прямой до места посадки,
либо через точку снижения, где возможны некоторые изменения линии пути. Прямой
VS – это визуальный участок для выполнения визуального полета от MAPt до места
приземления.
Примечание. Место посадки может представлять собой необорудованный вертодром или располагаться на необорудованной ВПП.
15.8.3 Зона безопасности (SA), окружающая FATO для вертодромов, предназначенных для использования в визуальных метеорологических условиях должна простираться за пределы контура зоны FATO по крайней мере на 3 м или 0,25 габаритной
длины/ширины, в зависимости от того, какая величина больше, наиболее длинного/широкого вертолета, для обслуживания которого рассчитывается зона.
Для вертодромов, предназначенных для полетов по приборам, зона безопасности (SA), окружающая FATO должна простираться:
– в поперечном направлении на 45 м с каждой стороны осевой линии
– в продольном направлении на 60 м от границ FATO.
15.8.4 Для защиты визуального участка рассматриваются:
- поверхность пролета препятствий (OCS), которая простирается от MAPt до
места посадки и аналогична поверхности визуального участка п. 2.4;
- три поверхности обозначения препятствий (OIS), цель которых выявлять данные о препятствиях вблизи места посадки.
15.8.5 Для определения точки, в которой воздушное судно может снижаться
ниже OCA/H и начать визуальное снижение до места посадки, может потребоваться
точка снижения (DP), определяемая линией пути и расстоянием от MAPt. Допускается
изменение курса в MAPt или в DP (если таковая установлена), но не в обеих точках.
Максимальное изменение курса составляет 30º.
191
15.8.6 Угол снижения на визуальном участке (VSDA) представляет собой угол
от MDA/H в месте расположения MAPt или DP до высоты зависания (НСН) над местом
посадки.
15.8.7 Поверхность пролета препятствий (OCS). OCS выравнивается по направлению симметрично относительно линии курса между HRP и MAPt (рис.15.6, 15.7,
15.8, 15.9). Если изменение линии пути установлено в DP, OCS выравнивается по направлению симметрично линии курса между HRP и DP (рис.15.10).
OCS начинается на внешнем крае зоны безопасности (SA) места посадки. Ширина OCS в ее начале равна ширине SA. Внешние края расходятся от своего начала на
краю SA до достижения общей максимальной ширины 120 м, и от этой точки внешние
края простираются параллельно осевой линии OCS. Для обеспечения полетов только в
дневное время расширение поверхности составляет 10%. Для полетов в ночное время
угол расширения увеличивается до 15%.
Восходящий наклон OCS максимально составляет 12,5% от превышения места
посадки до точки, где поверхность достигает высоты OCA/H – MOC, установленной
для конечного участка захода на посадку (FAS). После чего поверхность ОCS продолжается горизонтально.
Горизонтальная OCS расширяется до достижения ширины равной ширине основной зоны FAS и простирается до границы раннего АТТ на MAPt.
Примечание 1. Расчет размера SA и внешних краев SA, используемых для установления исходной базовой ширины, зависит от воздушного судна и необходим наряду
с другой информацией о месте посадки для разработки прямого VS для схемы захода
на посадку по приборам до PinS для вертолетов.
Примечание 2. Наклон OCS 12,5% определяется VSDA 8,3º минус 1,12º.
15.8.8 Поверхности обозначения препятствий (OIS).К обеим сторонам поверхности OCS примыкают наклонные поверхности OIS. Наклонные OIS начинаются на
внешнем крае SA. Внутренний край OIS простирается по внешнему краю OCS. Внеш-
192
ний край наклонной OIS устанавливается посредством прямого соединения начала с
внешним краем основных зон в MAPt/DP.
Начало наклонной OIS устанавливается на превышении места посадки.
Наклонные OIS восходят в вертикальной плоскости с таким же градиентом, как
и OCS.
Горизонтальная OIS обрамляет внешние боковые границы наклонной OIS.
Внешние края горизонтальной OIS начинаются на внешних краях дополнительной зоны конечного участка захода на посадку и соединяются по касательной с окружностью радиусом 740 м с центром в HRP.
Высота горизонтальной OIS соответствует OCA/H для схемы захода на посадку
по приборам минус 30 м.
15.8.9 Угол снижения на визуальном участке (VSDA). VSDA определяет номинальную траекторию снижения воздушного судна на визуальном участке. VSDA равен
углу наклона OCS плюс 1,12º. Максимальный VSDA составляет 8,3º. Траектория снижения, определяемая VSDA начинается на MDA/H в MAPt или DP, если таковая установлена, и заканчивается на НСН.
15.8.10 DP устанавливается, если траектория снижения, определяемая VSDA
достигает OCA/H, в точке, которая располагается между самым поздним АТТ на MAPt
и HRP. В этом случае требуется дополнительная OCS. Дополнительная OCS устанавливается как горизонтальная поверхность, равная по размеру основной зоне FAS на абсолютной высоте OCA/H минус MOC и простирается от MAPt до DP.
15.8.11 Ни одно препятствие не должно превышать поверхность OCS прямого
VS. Препятствия, превышающие наклонные или горизонтальную поверхности OIS,
должны фиксироваться документально и наноситься на карту.
15.8.12 Длина визуального участка должна выбираться таким образом, чтобы
обеспечивалось достаточное количество визуальных ориентиров от MAPt до места посадки и при этом обеспечивалось достаточное расстояние для уменьшения скорости,
снижения и посадки воздушного судна в месте посадки.
193
Максимальная длина визуального участка составляет 3,00 км.
Оптимальная длина визуального участка зависит от максимальной скорости на
конечном участке захода на посадку в схеме захода на посадку по приборам и составляет:
- 1,20 км для максимальной скорости 130 км/ч;
- 2,00 км для максимальной скорости 165 км/ч.
Минимальная длина визуального участка зависит от максимальной скорости на
конечном участке захода на посадку в схеме захода на посадку по приборам и составляет:
- 1,00 км для максимальной скорости 130 км/ч;
- 1,60 км для максимальной скорости 165 км/ч.
194
Рис. 15.6. Прямой VS без DP и без изменения курса
195
Рис. 15.7. Прямой VS без DP и с изменением курса на 30o в MAPt
196
Рис. 15.8. Прямой VS с DP и без изменения курса
197
Рис. 15.9. Прямой VS с DP и с изменением курса на 30o в MAPt
198
Рис. 15.10. Прямой VS с DP и с изменением курса на 30o в DP
15.9 ПУБЛИКАЦИЯ СХЕМЫ ЗАХОДА НА ПОСАДКУ
15.9.1 Название карты, предназначенной для захода на посадку по приборам до
точки в пространстве для вертолетов, должно включать курс конечного участка захода
на посадку (три цифры), например RNAV (GNSS) 036. Термин «КAT Н» должен быть
отчетливо виден в карте в плане, но не включен в название. Таблица минимумов должна включать обозначение «КAT Н».
199
Схемы захода на посадку до точки в пространстве не публикуются на той же
карте заходов на посадку по приборам, на которой указываются схемы заходов на посадку самолетов (КАТ А, В, С, D) и вертолетов (КАТ Н) на ВПП.
15.9.2 В случае заходов на посадку до точки в пространстве, по которым указано «Следовать визуально от (MAPt)», схема может использоваться для любого количества вертодромов. Указывается название(я) вертодрома(ов), превышение(я) вертодрома(ов), а также направление (до ближайшего градуса) и расстояние (до ближайших
двух десятых километра) от MAPt на контрольную точку аэродрома/вертодрома.
15.9.3 Если имеется ограничение по скорости маневрирования, оно должно быть
четко обозначено на опубликованной карте захода на посадку по приборам. Например:
«Скорость (Vпр) на конечном участке захода на посадку и при уходе на второй круг не
должна превышать ХХХ км/ч».
15.9.4. Если для выполнения процедуры захода на посадку требуются градиенты
снижения более 10% вплоть до 13,2% или градиенты набора высоты при уходе на второй круг более 4%, это четко должно быть обозначено на карте захода на посадку.
200
16 КОДИРОВАНИЕ БАЗЫ НАВИГАЦИОННЫХ ДАННЫХ
16.1 ОБЩИЕ ПОЛОЖЕНИЯ
16.1.1 Данный раздел содержит рекомендации относительно применения элементов, используемых при построении схем, которые облегчат кодирование схем в базах навигационных данных.
16.1.2 Все навигационные данные, используемые системой RNAV, сертифицированной для полетов в районе аэродрома, содержатся в кодовой форме в базе навигационных данных.
16.1.3 Для перевода текстового описания схем в кодовую форму, приемлемую
для навигационных систем, применяется концепция «Траектория и указатель ее окончания».
16.1.4 Указатели окончания траектории используются для обозначения конкретного типа траектории каждого участка маршрута RNAV с момента взлета до входа
в структуру маршрутов, и от точки, где воздушное судно покидает участок маршрута,
до конца схемы (схем) RNAV. Указатели окончания траектории не используются для
построения участков маршрута или других маршрутов за пределами воздушного пространства района аэродрома.
16.2 ТИПЫ УКАЗАТЕЛЕЙ ОКОНЧАНИЯ ТРАЕКТОРИЙ
16.2.1 Указатели окончания траекторий обозначаются двумя буквами, каждая из
которых имеет определенное значение для описания маневра в вычислительной навигационной системе. Первая буква обозначает тип траектории, по которой должно лететь воздушное судно, вторая указывает, чем будет оканчиваться данный сегмент маршрута. Для построения схем с применением RNAV используются 11 указателей окончания траектории, а также дополнительный указатель IF. Для целей RNP следует использовать меньший поднабор из четырех указателей окончания траекторий: IF, TF, RF
и HM. Описание всех кодов схем RNAV приводится ниже.
16.2.2 Начальная контрольная точка (IF). Кодирование схем RNAV начинается в
IF.
201
IF используется для определения только начала маршрута или схемы. Для задания линии пути IF используется совместно с другим типом участка. Начальная контрольная точка (IF) не используется для построения схемы и не должна публиковаться
в описании схемы.
16.2.3 Линия пути до контрольной точки (TF).
Основным прямым участком маршрута для RNAV является участок TF.
TF определяется геодезической траекторией между двумя точками пути. Первой
из двух точек пути является либо точка пути окончания предыдущего участка, либо
начальная контрольная точка (IF). Промежуточный и конечный участки захода на посадку всегда должны быть TF. Во всех случаях, когда FMS требует CF для конечного
участка захода на посадку, шифровальщик базы данных может использовать CF вместо
TF.
16.2.4 Прямо до контрольной точки (DF).
202
Участок DF используется для определения участка маршрута от неустановленного местоположения воздушного судна на текущей линии пути и проходящего прямо
до заданной контрольной точки/точки пути. Указатель окончания траектории DF не
обеспечивает предсказуемую, повторяющуюся траекторию полета и имеет весьма разнообразное применение. При использовании после FA, VA или CA DF эффективен для
рассредоточения линий пути в пределах обширной области, а сочетание CA/DF может
использоваться для уменьшения влияния на окружающую среду на начальных этапах
вылета. DF также обеспечивает самое короткое расстояние пролета от точки разворота
(точка пути «флайовер») или с абсолютной высоты разворота до следующей точки пути. Однако использование DF ограничивается рядом особых правил, изложенных в п.
16.3.
16.2.5 Курс до абсолютной высоты (CA) (полет заданным курсом до заданной
высоты).
CA используется для определения направления участка маршрута удаления, который оканчивается на абсолютной высоте в неустановленном местоположении. CA
используется вместо FA в качестве указателя окончания начальной траектории в SID
для обеспечения защиты от влияния ухода инерциальной системы.
16.2.6 Курс до контрольной точки (CF) (полет c заданным курсом к контрольной
точке).
203
CF определяется как направление движения, которое заканчивается в контрольной точке/точке пути, после которой следует конкретный участок маршрута. CF обычно используется после FA или CA в схемах вылета или ухода на второй круг, в которых он эффективен для ограничения разброса линий пути. Комбинация CA/CF может
быть эффективной для уменьшения влияния на окружающую среду на начальных этапах вылета. Использование CF дополнительно ограничивается рядом особых правил,
подробно изложенных в п. 16.3.
16.2.7 Курс от контрольной точки до абсолютной высоты (FA) (полет c заданным курсом от контрольной точки до набора заданной высоты).
FA используется для определения участка маршрута набора высоты, который
начинается в контрольной точке/точке пути и заканчивается в точке, где воздушное
судно достигает установленную абсолютную высоту. Местоположение точки достижения абсолютной высоты не указывается. FA не обеспечивает предсказуемую повторяющуюся траекторию полета в связи с тем, что неизвестна точка ее окончания, однако
является полезным указателем окончания траектории в схемах ухода на второй круг.
204
16.2.8 Курс от контрольной точки до завершения режима вручную (FM) (полет c
заданным курсом от контрольной точки до начала радиолокационного наведения).
FM используется в тех случаях, когда участок маршрута завершается началом
радиолокационного наведения. Он обеспечивает функцию, аналогичную VM. Воздушное судно продолжает полет по заданному направлению до вмешательства пилота.
16.2.9 Ожидание/полет по схеме «ипподром» до завершения режима вручную
(HM).
HM используется для определения траектории в схеме ожидания, полет по которой вручную завершается пилотом. Часто используется при ожидании дальнейшего
указания со стороны органа ОВД.
205
16.2.10 Дуга постоянного радиуса до контрольной точки (RF) (по дуге с заданным радиусом к контрольной точке).
Участок RF представляет собой круговую траекторию вокруг определенного
центра разворота, которая заканчивается в точке пути. Начало участка дуги определяется точкой пути окончания предыдущего участка. Данные о точке пути в конце участка дуги, направлении разворота на этом участке и центре разворота содержатся в базе
навигационных данных. Радиус рассчитывается системой RNAV как расстояние от
центра разворота до точки пути окончания траектории. Для любого разворота в диапазоне 2°–300° может быть определена одна дуга. Функция RF обеспечивается только в
системах, отвечающих требованиям RNP-RNAV.
16.2.11 Направление до абсолютной высоты (VA) (полет с заданным магнитным
курсом до выхода на заданную высоту (набор)).
206
VA, как правило, используется при вылетах, когда для набора высоты указывается направление, а не линия пути. Этот участок оканчивается на заданной абсолютной
высоте в неустановленном месте.
16.2.12 Направление до пересечения (VI) (Полет с заданным магнитным курсом
до выхода на следующий сегмент маршрута).
Участок VI кодируется в том случае, когда воздушному судну задается направление до пересечения им следующего участка. Воздушное судно следует по заданному
направлению до пересечения следующего участка..
16.2.13 Направление до завершения режима вручную (VM) (полет с заданным
магнитным курсом до перехода на радиолокационное наведение).
Участок VM может кодироваться в том случае, когда в конце схемы обеспечивается радиолокационное наведение. Этот указатель несет аналогичную функцию, как
и для FM. Воздушное судно продолжает движение по заданному направлению до вмешательства пилота.
207
16.3 ПРИМЕНЕНИЕ ЭЛЕМЕНТОВ ПОСТРОЕНИЯ СХЕМ
16.3.1 Указатели окончания траекторий.
Разработчику схем необходимо соблюдать правила применения указателей
окончания траекторий с целью обеспечения правильного кодирования схемы в бортовой базе навигационных данных. Основные правила, связанные с применением указателей окончания траекторий изложены в п.16.4.
16.3.2 Разработчик схемы должен учитывать следующие факторы для обеспечения однозначного обозначения схемы в базе навигационных данных:
- нельзя использовать двойственные описания условий перехода, например «набрать заданную высоту к заданной точке пути» или «выполнить разворот в заданной
точке пути, но не ниже заданной высоты»;
- ограничения по абсолютной высоте и скорости применяются только в точке
пути;
- публикуется вся подробная информация о любых конкретных ограничениях в
отношении схемы.
16.4 ПРАВИЛА КОДИРОВАНИЯ УКАЗАТЕЛЕЙ ОКОНЧАНИЯ ТРАЕКТОРИЙ
16.4.1 В таблице 16.1 приведены указатели окончания траекторий, которые могут использоваться для начального и конечного участков схемы RNAV (SID, STAR, заход на посадку и уход на второй круг).
Таблица 16.1. Указатели окончания траекторий на начальном и конечном участках
Схема RNAV
SID
STAR
Заход на
посадку
Уход на второй
круг
Начальный участок
CA, CF, VA, VI
IF
IF
Конечный участок
CF, DF, FM, RF, TF, VM
CF, DF, FM, HM, RF, TF, VM
CF, TF, RF
CA, CF, DF, FA, HM, RF, VI, VM
CF, DF, FM, HM, RF, TF, VM
208
16.4.1.1 С точки зрения построения схемы единственными обоснованными начальными указателями окончания траектории для SID являются CA или CF. Допускается использование FA в качестве начального участка SID, который представляет такую же линию пути, как и CA, однако FA не подходит для некоторых воздушных судов на начальных этапах вылета. VA может использоваться для параллельных вылетов,
когда от воздушных судов требуется выдерживать направление, а не линию пути после
взлета.
16.4.1.2 FM или VM могут использоваться для завершения «открытых STAR»,
если на конечном участке захода на посадку обеспечивается радиолокационное наведение. Выбор FM или VM зависит от требований органа ОВД.
16.4.1.3 RF может использоваться только для схем на основе RNP.
16.4.2 В таблице 16.2 «Последовательности указателей окончания траекторий»
приведены допустимые последовательности участков. Затененные области указывают
на то, что последовательность «текущий участок/следующий участок» не допускается.
209
Таблица 16.2. Последовательности указателей окончания траекторий
Текущий участок
Следующий участок
IF CA CF DF FA FM HM RF TF VA VI VM
CA
CF
1
DF
1
FA
FM
HM
IF
2
2
2
3
RF
TF
VA
VI
VM
Примечания:
1. Последовательность CF/DF или DF/DF может использоваться только в случае
окончания первого участка (CF или DF) точкой «флайовер». В других случаях используется альтернативное кодирование (с использованием участка TF);
2. Участок IF кодируется только в том случае, если ограничения по абсолютной
высоте на каждом конце участка FA или HM являются разными;
3. Комбинацию IF/RF разрешается использовать только в начале конечного участка захода на посадку.
16.4.3 Применяются следующие основные правила:
после FA, CA и VA должен следовать DF или CF (рекомендуется DF);
после TF до точки пути «флайовер» может следовать только TF или CF;
210
если на схеме требуется DF после точки пути «флайовер», то предыдущий участок кодируется CF или DF;
DF не может следовать за точкой пути «флай-бай»;
точка пути в начале и в конце участка RF не кодируется как «флайовер».
16.4.3.1 Несмотря на то, что большинство вылетов по прямой должно начинаться с последовательности CA/DF для начального прямого участка, если первая точка пути «флай-бай» располагается на удалении менее 5,6 км от DER, опыт свидетельствует о
том, что предпочтительнее начинать с CF.
16.4.3.2 Если разворот на начальном этапе вылета ограничивается расстоянием
от DER и минимальной абсолютной высотой, применение ограничения по абсолютной
высоте в точке пути разворота не гарантирует соблюдение обоих ограничений. Лучше
всего кодировать первый участок как CA, а второй участок как CF, при этом выбранное направление второго участка гарантирует, что самый ранний разворот до пересечения произойдет в требуемой точке разворота или после нее.
16.4.3.3 В таблице 16.3 приведены данные, необходимые для каждого указателя
окончания траектории. Затененные области показывают, какие данные не применимы к
указателю окончания траектории.
211
0
0
Т
0
0
0
0
0
0
Т
Т
Т
Т
Т
3
0
4
4
4
Т
5
0
6
0
0
6
0
0
0
0
0
6
0
0
Т – требуемые;
0 – необязательные;
1 – требуемые только для комбинаций CF/DF и DF/DF;
2 – касательная линия пути приближения;
3 – касательная линия пути удаления;
4 – направление, а не курс;
5 – расстояние по линии пути;
6 – абсолютная высота – на или выше.
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Центр дуги
Вертикальный угол
Предел скорости
Ограничение по абсолютной высоте 2
Т
0
Т
Т
0
0
2
0
Ограничение по абсолютной высоте 1
Т
0
Т
Т
0
0
Длина траектории
Т
0
Т
Т
0
0
0
0
0
0
0
0
0
0
Магнитный курс
Пеленг от навигационного
средства
0
0
Направление разворота
Флайовер
1
1
Расстояние от навигационного средства
Т
Т
Т
Т
Т
Т
Т
Т
Рекомендуемое
навигационное средство
CA
CF
DF
FA
FM
HM
IF
RF
TF
VA
VI
VM
Обозначение точки пути
Указатель направления траектории
Таблица 16.3. Указатели окончания траекторий (требуемые данные)
0
0
0
Т