45 ЭФФЕКТИВНОСТЬ ОЦЕНКИ УГЛОВОЙ КООРДИНАТЫ ЦЕЛИ
реклама

Физика
УДК 681.884
С. И. ЛЮЗИН, И. Ю. ЛЮЗИН
ЭФФЕКТИВНОСТЬ ОЦЕНКИ УГЛОВОЙ КООРДИНАТЫ ЦЕЛИ
МНОГОЛУЧЕВОЙ АНТЕННОЙ РЕШЕТКОЙ
В данной статье рассмотрена проблема синтеза веера диаграмм направленности многоэлементной антенной решетки
с учетом неоднозначности положения цели. Проанализировано влияние и выявлено предпочтительное (с точки зрения
минимизации дисперсии оценки пеленга) число каналов, используемых для построения веера диаграмм направленности.
В результате получено, что алгоритмы оценивания пеленга цели должны быть построены на основе статистик выходных
сигналов, по меньшей мере, трех ДН веера, что обеспечивает относительную эффективность оценки пеленга на уровне не
ниже 0,95. Исследована зависимость потерь эффективности оценки от положения цели относительно осей ДН измерительных
каналов. Показано, что синтез многолучевой диаграммы направленности антенной решетки должен вестись с учетом
возможных потерь эффективности пеленгования, связанных с угловым расположением осей диаграммы направленности
измерительных каналов, поскольку на относительную эффективность оценки угловой координаты влияют не только
энергетические потери, но и изменение крутизны пеленгационной характеристики.
Ключевые слова: антенные решетки; синтез диаграммы направленности; амплитудно-фазовое распределение.
The multi-element antenna array multi-beam radiation pattern synthesis is examined considering the target position ambiguity. The
influence of channel number is analyzed and the preferred number of channels to minimize bearing estimation variance is found. It
has been found that the bearing evaluation algorithms should be based on the output signal statistics from, at least, three antenna elements to provide 0,95 relative effectiveness of the bearing estimate. The estimate effectiveness loss dependence on angular position is
examined. As demonstrated, direction-finding effectiveness loss should be considered due to the angular position of antenna channel
radiation pattern, because a relative effectiveness of the angular position estimate is influenced not only by energy losses, but also by
the direction-finding curve slope. Consequently the direction-finding curve slope should be used as an object function of synthesis.
Key words: аntenna array; radiation pattern synthesis; amplitude-phase distribution.
Постановка задачи синтеза
Задача синтеза антенной решетки (АР) состоит в поиске некоторого дискретного амплитудно-фазового
распределения (АФР), доставляющего оптимум диаграмме направленности (ДН) согласно выбранному
критерию. Существует несколько подходов к данной задаче, которые основаны на применении расчетных
методов или решении оптимизационных задач. Традиционно расчетные методы применяют в приближении плоской падающей волны, АФР выбирают исходя из знания ДН и пространственного расположения
фазовых центров отдельных элементов АР. Данный подход используют, как правило, для решеток с правильной геометрической формой – линейных, кольцевых, цилиндрических, сферических. Для АР сложной конфигурации, в том числе конформных, применяют методы, основанные или на аппроксимационном синтезе, или на решении оптимизационных задач [1]. При аппроксимации решением задачи синтеза
считается такое АФР, что соответствующая ему ДН D обеспечивает минимум функционалу
Q(W ) || R () D() ||( ) ,
где норма понимается обычно или в квадратичном, или в минимаксном смысле, а функция R
представляет собой модель ДН с требуемыми параметрами. Оптимизационные же задачи обычно не
требуют задания некоторой модельной функции R , а оптимизируют характеристики антенны по
некоторому параметру, например, уровню боковых лепестков, ширине основного лепестка, коэффициенту направленного действия (КНД) [2]. Поиск оптимального решения осуществляется путем выбора такого АФР, которое доставляет оптимум выбранному параметру при наличии ограничения. Ограничения на АФР могут быть обусловлены собственно формулировкой задачи синтеза, так, например,
ставшая уже классической дольфовская задача предполагает минимизацию уровня боковых лепестков
при заданной ширине основного [3]:
Q(W ) max 1 || D() ||( ) min ,
где 1 – область боковых лепестков ДН. Без ограничения задача приводит к тривиальному решению
W 0, для предотвращения которого вводят, например, линейные ограничения вида D( 0 ) const .
Существуют методы, решающие задачу синтеза АР моноимпульсной пеленгационной системы, где
целевой функцией является отношение крутизны ДН к уровню ее боковых лепестков [4].
Все рассмотренные выше методы поиска оптимальных АФР характеризуются тремя ключевыми
признаками: 1) используют целевые функции, имеющие физический смысл энергии или амплитуды
принимаемого сигнала; 2) предполагают наличие априорной информации об угловом положении цели
при задании модельной ДН или ограничении на АФР; 3) оптимизируют одну ДН.
Однако многоэлементные АР предполагают систему обработки сигналов, реализующую формирование стационарного веера, состоящего из некоторого набора ДН, перекрывающего пространственную
рабочую область. Положение цели априори неизвестно и может не совпадать с положением оси одной
из ДН веера. Поэтому представляется целесообразным рассмотреть задачу совместного синтеза ДН
веера с учетом неоднозначности положения цели.
45
Вестник БГУ. Сер. 1. 2013. № 3
Относительная эффективность оценки угловой координаты цели
Для обоснования выбора структуры веера ДН АР определим зависимости минимальной величины
дисперсии оценки угловой координаты цели в зависимости от структуры обработки выходных сигналов ДН: определим эффективность оценок угловой координаты такой системы относительно границы
Крамера – Рао для системы с заданной конфигурацией АР, воспользовавшись логарифмом функции
правдоподобия совокупности векторов X t выборок сигнала на выходах элементов АР:
ln L Xt | at , ( Xt at Vs ) R 1 ( Xt at Vs ) ,
где X t – совокупность сигнальных векторов на выходах элементов АР, at – значения комплексной
амплитуды сигнала цели, Vs Vs () – вектор значений АФР сигнала цели, R – матрица ковариаций
шума, sin() – обобщенная угловая координата.
Исключив из функции правдоподобия второстепенные оцениваемые параметры at , получим границу Крамера – Рао для оценки угловой координаты:
Vs R 1 Vs
1
M 2 min {}
,
2 Ps det[U s R 1 U s ]
t
d
Vs – вектор, составленный из производных АФР сигнала цели на элеменd
тах АР по угловой координате, Ps – мощность сигнала цели.
В пеленгационных системах для оценки углового положения цели используется небольшая совокупность диаграмм направленности веера, оси которых расположены вблизи этого направления – W,
тогда функция правдоподобия совокупности векторов выборок сигнала W X t Yt на выходах этих
каналов относительно угловой координаты источника сигнала цели представима в виде
где U s [Vs
dVs ], dVs
ln L Yt |
V W W RW
W RW
V W W RW W V
1
Yt Yt
1
1
W V
,
где Yt Yt есть ковариационная матрица смеси полезного сигнала цели и шумовых сигналов на выходах веера ДН. В этом случае граница Крамера – Рао:
Vs W W RW W Vs
1
.
M 2 {}
2 Ps det U W W RW 1 W U
s
s
1
При некоррелированной изотропной помехе границы Крамера – Рао составят:
2
Vs Vs
M 2 min 0
,
2 Ps det U s U s
Vs W W RW W Vs
2
M 2 0
.
2 Ps det U W W RW 1 W U
s
s
1
Заметим, что основное отличие выражения для дисперсии оценки M 2 от ее минимального зна1
чения M 2 min состоит в наличии сомножителя W W RW W , который является проектором на
некоторое векторное подпространство, задаваемое набором весовых векторов, формирующих ДН веера. Из последнего следует, что дисперсия оценки угловой координаты будет определяться, во-первых,
отношением сигнал/шум (ОСШ) qs 2 Ps 02 и, во-вторых, длиной вектора АФР сигнала цели и его
1
производной в метрике, заданной проектором W W W W .
Здесь возможно определить относительную эффективность оценки угловой координаты цели как
отношение нижней границы дисперсии ее оценки для системы АР с ограниченным набором ДН веера
к границе Крамера – Рао для полной АР:
U W W W 1 W U
det
s
M 2 min
Vs Vs
s
.
B ( )
1
M 2
det U s U s
Vs W W W W Vs
46
Физика
Очевидно, что величина B () находится в интервале значений [0,1], поскольку длина вектора Vs
дящего в состав выражения det U W W W
всегда больше его длины в метрике W W W
s
1
1
W , это же касается и вектора производной АФР, вхо-
W U s . Значения 1 B() достигает только при таком
наборе векторов W , который представляет собой линейно независимый набор, полностью накрывающий векторное пространство размерности, равной числу элементов АР. В данном случае проектор
W WW
1
W вырождается в единичную матрицу.
Для линейной эквидистантной невзвешенной АР с межэлементным расстоянием, равным половине
длины волны, вектор АФР и его производная могут быть представлены в виде
N 1
N 1
N 1
Vs exp j n
, dVs j n
exp j n
, n 1...N .
2
2
2
Подстановка данных векторов АФР в выражение для границы Крамера – Рао дает известную оценку
для минимальной дисперсии угловой координаты цели для линейной антенной эквидистантной решетки:
2
2
N
12
M 2 min 0
0
.
0
2 Ps N
2 Ps N N 2 1
2
0 N N 1 / 12
И соответственно относительная эффективность оценки угловой координаты:
1
det U s W W W W U s
M 2 min
12
.
B ( )
1
2
M 2
N ( N 1) V W W W W V
s
s
Рассмотрим зависимости относительной эффективности оценки угловой координаты от углового
положения цели при различном количестве используемых для формирования оценки пеленга измерительных каналов и различном угловом разнесении осей их диаграмм направленности. В качестве примера для моделирования используется 17-элементная эквидистантная антенная решетка с расстоянием
между элементами в половину длины волны. У антенной решетки формируется набор измерительных
каналов W , состоящий из двух, трех и четырех равновзвешенных ДН.
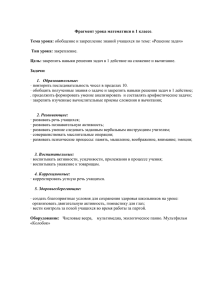
На рисунке (а, б, в) приведены графики относительной эффективности оценки пеленга цели для измерительных систем, образованных соответственно двумя, тремя и четырьмя каналами, в зависимости
от углового положения цели. Рядом с линиями графиков указаны угловые расстояния между осями измерительных каналов в единицах, равных ширине равновзвешенной ДН по уровню –3дБ.
Приведенные зависимости показывают, что для системы оценки пеленга цели, построенной на двух
измерительных каналах, минимальные потери эффективности оценки (минимальная дисперсия) наблюдаются при расположении цели посередине между осями измерительных каналов, увеличиваясь
при отклонении от этого положения. При угловом расстоянии между осями измерительных каналов,
равном 0,8÷1,0 ширины равновзвешенной ДН, дисперсия оценки, по меньшей мере, в 2 раза будет превышать минимально возможную дисперсию при отклонении пеленга цели от оси измерительной системы более чем на половину ширины ДН. И даже при расположении ДН веера на угловом расстоянии
0,5 потери относительной эффективности могут достигать 15 %. Можно утверждать, что построение
оценки пеленга цели на основе данных двух соседних ДН веера приводит к необходимости расстановки лучей на угловом расстоянии не более 0,5 ширины равновзвешенной ДН. Более предпочтительными
с этой точки зрения являются измерительные системы, основанные на трех и более каналах. Так, для
трехканальной системы потери в эффективности оценки пеленга менее 10 % наблюдаются уже при
угловом расстоянии между осями ДН веера 0,75 и менее, а при более плотном расположении с шагом
0,5 потери могут быть вообще незначительными – эффективность оценки пеленга составляет 0,99.
Для оценки влияния энергетического фактора на точность оценки пеленга цели воспользуемся
характеристикой, называемой коэффициентом использованной энергии (КИЭ) полезного сигнала
[5]. Для данного случая определим КИЭ как частное двух отношений сигнал/шум (ОСШ), первое из
которых является отношением сигнал/шум на выходе АР в условиях некоррелированной изотропной помехи, а второе – ОСШ на выходе АР в тех же условиях, но при предварительно сформированных ДН веера.
Известно [5], что ОСШ на выходе АР в условиях некоррелированной изотропной помехи описывается следующим выражением:
47
Вестник БГУ. Сер. 1. 2013. № 3
Зависимости относительной эффективности оценки пеленга цели от ее углового положения при различном количестве
измерительных каналов антенной решетки, используемых для формирования оценки. Рядом с линиями графиков указаны
угловые расстояния между осями измерительных каналов, измеренные в единицах, равных ширине ДН по уровню –3 дБ
48
Физика
q0
2 Ps
2P
Vs Vs 2s N .
2
0
0
ОСШ на выходе АР в условиях некоррелированной изотропной помехи при предварительно сформированных ДН веера с помощью набора весовых векторов W определяется проекцией вектора АФР
сигнала на подпространство, заданное этим набором векторов:
1
2P
q () 2s Vs W W W W Vs .
0
Тогда КИЭ:
КИЭ
1
1
Vs W W W W Vs .
N
На графиках (г, д, е) представлены зависимости КИЭ для системы из двух, трех и четырех ДН веера. Данные зависимости показывают, что энергетические потери относительно невелики и составляют
величины порядка единиц процентов, и только для двухканальной измерительной системы они достигают 20 % и то только при угловом расстоянии между осями измерительных каналов 1,0. Следует
обратить внимание на характер зависимостей – они достигают максимума при нахождении цели на оси
измерительного канала. Минимума КИЭ достигает при расположении цели посередине между осями
измерительных каналов. Из приведенных зависимостей можно сделать вывод, что ухудшение точности
пеленгования не связано с ухудшением отношения сигнал/шум.
Если в выражении для относительной эффективности оценки угловой координаты цели выделить
сомножитель, отвечающий за энергетические потери, то есть КИЭ, то оставшаяся часть (сомножитель)
D будет связана только с изменением крутизны пеленгационной характеристики данной системы
ДН веера:
B КИЭ () * D(),
1
det U s W W W W U s
.
D ( )
2
N ( N 1) / 12
На рисунке (ж, з, и) представлены зависимости крутизны пеленгационной характеристики. При
сравнении их с зависимостями относительной эффективности оценки угловой координаты видно, что
эффективности оценки по характеру зависимости определяются именно изменением свойств пеленгационной характеристики, а не ухудшением энергетических условий приема полезного сигнала.
***
Результаты моделирования показывают, что синтез веера многолучевой ДН АР должен вестись с учетом возможных потерь эффективности оценки пеленга цели, связанных с угловым расположением осей
ДН веера. Алгоритмы оценивания пеленга цели должны быть построены на основе статистик выходных сигналов, по меньшей мере трех ДН веера, что обеспечивает относительную эффективность оценки пеленга на уровне не ниже 0,95.
В качестве целевой функции задачи синтеза может быть использована величина средней относительной эффективности оценки пеленга цели как характеристика информационных потерь.
Б И Б Л И О Г РА Ф И Ч Е С К И Й С П И С О К
1. З е л к и н Е . Г. , С о ко л о в В . Г. Методы синтеза антенн. М., 1980.
2. Жу р а в л е в А . К . , Л у ко ш к и н А . П . , П о д д у б н ы й С . С . Обработка сигналов в адаптивных антенных решетках.
Л., 1983. С. 77–85.
3. D o l p h C . L . Current distribution for briadsize arrays which optimized the reletionship between beam width and side lobe
level // Proc. IRE. 1946. June. Vol. 34. С. 335–348.
4. М и н ко в и ч Б . М . Оптимальный интерполяционный синтез апертурных диаграмм направленности // Радиотехника
и электроника. 1969. Т. 14. С. 1391–1399.
5. Ш и р м а н Я . Д . , М а н ж о с В . Н . Теория и техника обработки радиолокационной информации на фоне помех. М.,
1981. С. 340–342.
Поступила в редакцию 18.09.13.
Святослав Игоревич Люзин – ассистент кафедры радиофизики и цифровых медиатехнологий.
Игорь Юрьевич Люзин – директор Представительства ИОФ РАН в Республике Беларусь.
49