РОССИЙСКАЯ АКАДЕМИЯ НАУК ИНСТИТУТ ФИЗИЧЕСКОЙ
реклама

РОССИЙСКАЯ АКАДЕМИЯ НАУК
ИНСТИТУТ ФИЗИЧЕСКОЙ ХИМИИ
На правах рукописи
Виноградова Ольга Игоревна
ОСОБЕННОСТИ ГИДРОДИНАМИЧЕСКОГО И РАВНОВЕСНОГО
ВЗАИМОДЕЙСТВИЯ ГИДРОФОБНЫХ ПОВЕРХНОСТЕЙ
Специальность 02.00.04 – физическая химия
Диссертация на соискание ученой степени
доктора физико-математических наук
Москва 2000
2
СОДЕРЖАНИЕ
ВВЕДЕНИЕ ......................................................................................................... 6
1. Свойства гидрофобной поверхности ....................................................... 100
1.1. Гидрофобный
эффект
между
неполярными
молекулами
растворённого вещества. ................................................................................. 10
1.2. Межфазная энергия границы вода/гидрофобная поверхность. ......... 13
1.3. Кавитация. ............................................................................................... 13
1.4. Косвенные наблюдения гидрофобного притяжения. ......................... 14
1.5. Силы между гидрофобными поверхностями. ..................................... 15
1.5.1. Методы измерения гидрофобных сил. ................................................. 15
1.5.1.1. Прибор для измерения сил. ..................................................... 15
1.5.1.2. Атомно-силовой микроскоп.................................................... 17
1.5.2. Подготовка гидрофобных поверхностей к измерениям сил. ............. 22
1.5.3. Основные результаты............................................................................. 22
1.5.3.1. Функциональная зависимость силы от расстояния. ............. 22
1.5.3.2. Влияние краевого угла. ........................................................... 23
1.5.3.3. Влияние способа подготовки поверхности. .......................... 23
1.5.3.4. Наблюдения кавитации. .......................................................... 24
1.5.3.5. Влияние электролита и температуры. .................................... 25
1.5.4. Теоретические представления............................................................... 25
1.6. Скольжение относительно гидрофобной поверхности. ..................... 26
1.6.1. Эксперимент. .......................................................................................... 26
1.6.2. Модели проскальзывания. ..................................................................... 28
1.6.2.1. Молекулярное скольжение. .................................................... 28
1.6.2.2. Гипотеза газовой прослойки. .................................................. 30
1.7. Выводы по главе 1. ................................................................................. 30
3
2. Влияние растворённого газа на свойства тонкого слоя жидкости между
гидрофобными поверхностями. ...................................................................... 31
2.1. Введение. ................................................................................................. 31
2.2. Субмикрополости вблизи гидрофобной поверхности. Эксперимент
по оптической кавитации. ............................................................................... 33
2.2.1. Материалы и метод. ............................................................................... 33
2.2.1.1. Измерения оптической кавитации. ........................................ 33
2.2.1.2. Приготовление растворов и поверхностей. ........................... 34
2.2.2. Результаты. .............................................................................................. 37
2.2.2.1. Влияние электролитов. ............................................................ 37
2.2.2.2. Влияние растворённого газа. .................................................. 39
2.2.3. Обсуждение. ............................................................................................ 40
2.3. Выводы к главе 2. ................................................................................... 41
3. Проскальзывание жидкости относительно гидрофобной поверхности.43
3.1. Содержание и цели главы. ..................................................................... 43
3.2. Граничные условия на гидрофобной поверхности. ............................ 43
3.2.1. Основные факты. .................................................................................... 43
3.2.1.1. Эксперимент. ............................................................................ 44
3.2.1.2. Результаты и интерпретация. .................................................. 45
3.2.2. Модель проскальзывания. ..................................................................... 51
3.3. Гидродинамическое
взаимодействие
между
искривленными
гидрофобными поверхностями. ...................................................................... 55
3.3.1. Жёсткие поверхности. ............................................................................ 56
3.3.1.1. Анализ искривлённой поверхности. ...................................... 56
3.3.1.2. Решение уравнений течения жидкости.................................. 59
3.3.1.3. Обсуждение. ............................................................................. 63
3.3.1.3.1. Поправка на проскальзывание. ............................................ 63
3.3.1.3.2. Рейнольдсовская часть. ........................................................ 64
3.3.2. Упругие поверхности. ............................................................................ 67
4
3.4. Выводы к главе 3 .................................................................................... 75
4. Измерения сил между гидрофобными поверхностями ............................ 76
4.1.Моделирование измерения сил в SFA. .................................................... 76
4.1.1. Уравнения движения поверхностей. .................................................... 76
4.1.2. Метод „захлопывания“ (скачка). ......................................................... 79
4.1.2.1. Драйв-функция. ....................................................................... 79
4.1.2.2. Численный алгоритм. .............................................................. 80
4.1.2.3. Результаты и обсуждение. ....................................................... 80
4.1.3. Динамический метод. ............................................................................. 84
4.2. Измерения гидрофобных сил в AFM.................................................... 87
4.2.1. Уравнения движения в AFM. ................................................................ 87
4.2.1.1. Теория. ...................................................................................... 91
4.2.1.1.1.Кантилевер с вертикальной силой, приложенной к концу.91
4.2.1.1.2.Действие распределённого давления. .................................. 92
4.2.1.2. Эксперимент. ............................................................................ 95
4.2.1.3. Результаты и обсуждение. ....................................................... 96
4.2.2. Прямые измерения гидрофобных сил. ................................................. 97
4.2.2.1. Материалы и методы. ............................................................ 100
4.2.2.1.1. Подготовка поверхностей и воды. .................................... 100
4.2.2.1.2. Эксперимент. ....................................................................... 101
4.2.2.1.3. Интерпретация динамических кривых. ............................ 101
4.2.2.1.4. Измерения краевого угла. .................................................. 104
4.2.2.2. Обсуждение результатов. ...................................................... 105
4.3. Выводы к главе 4. ................................................................................. 115
5. Коагуляция частиц. .................................................................................... 117
5.1. Введение и формулировка задачи. ..................................................... 117
5.2. Решение. ................................................................................................ 119
5.2.1. Жёсткие сферы. .................................................................................... 119
5.2.1.1. Скорость столкновения. ........................................................ 119
5
5.2.1.2. Критерий коагуляции. ........................................................... 121
5.2.2. Упругие поверхности. .......................................................................... 122
5.3. Выводы к главе 5 .................................................................................. 128
ЗАКЛЮЧЕНИЕ. ............................................................................................. 129
Список используемых источников. .............................................................. 132
Приложение 1. ................................................................................................ 150
Приложение 2. ................................................................................................ 156
Приложение 3. ................................................................................................ 160
Приложение 4. ................................................................................................ 165
Приложение 5. ................................................................................................ 169
6
ВВЕДЕНИЕ
Предмет
настоящей
диссертации
–
взаимодействие
твёрдых
гидрофобных поверхностей через тонкий слой воды или водного раствора
электролита. Гидрофобная поверхность (обычно определяемая краевым углом
для воды θ a ≥ 90 o ) интересует многих. Процесс гидрофобизации широко
используется в промышленных технологиях, особенно основанных на
дестабилизации водных коллоидных суспензий. Например, при обогащении
руд
степень
гидрофобности
минеральных
частиц
определяет
их
флотируемость. Гидрофобизация играет ключевую роль в таких явлениях как
адгезия, смачивание, устойчивость плёнок, кавитация и коагуляция. Всё это
делает гидрофобную поверхность одним из основных объектов науки о
коллоидах.
Большинство работ в этой области изучало равновесные свойства
гидрофобной поверхности. Поверхностные явления обычно относят к
поверхностным силам между гидрофобными телами, поэтому большинство
экспериментальных работ было сфокусировано на прямых измерениях сил в
функции расстояния для разнообразных гидрофобных поверхностей и в
различных условиях. Измерения выявили существование очень сильного (на
порядки
величин
дальнодействующего
превышающего
(измеряемого
на
силу
ван-дер-Ваальса)
расстояниях
порядка
притяжения. Взаимодействие тел на таких расстояниях
и
100
нм)
бросает вызов
фундаментальным представлениям о структуре жидкостей, но, несмотря на
огромные
притяжения
теоретические
до
сих
усилия,
пор
не
природа
этого
дальнодействующего
выяснена.
Более
того,
большинство
экспериментальных данных кажутся необычными или противоречивыми.
Например, стандартные критерии гидрофобности, такие как наступающий
краевой угол θ a или адгезия между двумя поверхностями (отнесённая к
межфазной энергии γ ) не предсказывают однозначно величину и радиус
7
действия гидрофобного притяжения. В то же время, кривая сила-расстояние
оказывается очень чувствительной к методу подготовки поверхностей. С
другой
стороны,
состав
и
свойства
жидкого
раствора
(температура,
концентрация и тип электролита, полярность растворителя и т.д.), судя по
всему, не оказывают сильного влияния на эффект.
Информация о поведении гидрофобных тел в динамических условиях
ограничена несколькими сообщениями о течении жидкостей в тонких
гидрофобных капиллярах.
ожидаемым
при
Найденное
выполнении
увеличение потока по сравнению с
условия
прилипания
может
быть
интерпретировано в пользу проскальзывания жидкостей, дать объяснение
которому также никому не удалось.
Целью настоящей работы является исследование равновесных и
динамических свойств тонкого слоя воды, заключенного между гидрофобными
поверхностями.
В соответствии с поставленной целью решаются следующие задачи
исследования:
1.
исследование роли растворённого газа на структуру и свойства тонкого
слоя жидкости, заключённого между гидрофобными поверхностями;
2.
исследование
гидрофобного
проскальзывания
и
его
роли
при
взаимодействии гидрофобных тел;
3.
формулировка
и
решение
уравнений
движения
гидрофобных
поверхностей в аппарате для измерения поверхностных сил и атомносиловом микроскопе;
4.
прямые измерения сил гидрофобного притяжения;
5.
приложение полученных результатов к исследованию коагуляции
гидрофобных частиц.
Поставленные цели и сформулированные задачи исследования решены в
диссертационной работе с использованием оптической кавитации, измерений
сил с помощью атомно-силового микроскопа и аппарата для измерения
8
поверхностных сил, исследования течения жидкостей в тонких капиллярах,
методов
термодинамики,
математической
физики,
гидродинамики,
математического моделирования и разработки программного обеспечения
(пакет программ реализован в среде Matlab).
Проведенные исследования позволяют утверждать, что основными
результатами
работы
являются
теоретические
и
экспериментальные
доказательства того, что:
1.
Особые динамические и поверхностные свойства тонкого слоя
жидкости
между
гидрофобными
поверхностями
обусловлены
процессами нуклеации растворённого газа;
2.
Гидрофобное проскальзывание является кажущимся и есть результат
расслоения бинарной смеси с образованием тонкого граничного слоя с
пониженной вязкостью. Следствием гидрофобного проскальзывания
является
увеличение
потока
жидкости
вблизи
гидрофобной
поверхности, а также уменьшение сопротивления сближению тел;
3.
Все методики, используемые при измерении поверхностных сил
притяжения,
являются
динамическими.
Динамическая
сущность
измерений сил влияет как на результаты измерений, так и на их
интерпретацию;
4.
Наблюдаемое экспериментально дальнодействующее гидрофобное
притяжение есть результат суммарного действия нескольких эффектов,
основным из которых является
коалесценция поверхностных,
долгоживущих, газовых пузырей субмикронного размера.
5.
Коагуляция
гидрофобных
частиц
в
динамических
условиях
определяется, в основном, эффектом кажущегося проскальзывания и,
частично, гидрофобным притяжением. Жёсткие частицы могут
коагулировать даже в отсутствие поверхностной силы притяжения.
Коагуляция
упругих
частиц
возможна
только
при
действии
аттракционных сил и может быть подавлена из-за деформации.
9
Полученные результаты
процессах,
основанных
на
могут быть использованы
использовании
в промышленных
гидрофобизации
с
целью
повышенной коагуляции и агрегации частиц (например, флотация). Результаты
работы могут также быть использованы в физике полимеров, биофизике,
трибологии, контактной механике и гидродинамике.
Система представлений о поверхностных явлениях, которая привела к
диссертационной работе, сформировалась у автора под влиянием академика
Бориса Владимировича Дерягина (1902-1994). Мне посчастливилось быть его
ученицей и я благодарна ему за всё, чему он меня научил.
10
1.
СВОЙСТВА ГИДРОФОБНОЙ ПОВЕРХНОСТИ
До сих пор не ясно, что понимать под гидрофобной поверхностью.
Обычно частично гидрофобной, или сольвофобной, по отношению к какой-то
жидкости называют поверхность, для которой жидкость даёт конечный краевой
угол. Поверхность считается истинно гидрофобной, если краевой угол больше
90°. Такое определение гидрофобности применимо к любому агрегатному
состоянию соприкасающихся фаз. Таким образом, граница раздела воды с
воздухом, жидкой ртутью, твёрдым парафином или фтороуглеродами должна
считаться гидрофобной. Однако, в случае жидкостей и газов двусмысленность
часто возникает в связи с тем, что гидрофобность (краевой угол) сильно
зависит от относительного давления паров в системе. Так, например, октан и
додекан не растекаются по поверхности воды и образуют линзы с конечным
краевым углом при давлении насыщенных паров, а пентан растекается. Пентан
образует капли на слюде, но растекается, если давление паров достигает
равновесного. Такие системы в диссертации не рассматриваются. Мы уделяем
особое внимание твердым гидрофобным поверхностям в контакте с водой или
водными
растворами
электролитов,
а
в
случае
капель
и
пузырей
ограничиваемся ситуацией, где влиянием насыщения паров можно пренебречь.
1.1. Гидрофобный
эффект
между
неполярными молекулами растворённого
вещества.
Гидрофобный
эффект,
или
взаимодействие
между
неполярными
(гидрофобными) молекулами растворённого вещества, есть проявление
неблагоприятной свободной энергии растворения /1,2/. Низкая растворимость
углеводородов и инертных газов в воде является следствием наличия в
11
последней водородной связи. Чтобы минимизировать число водородных
связей, которые должны быть разрушены для помещения в воду молекулы
растворённого вещества, вода образует полость. Это ведёт к возрастанию
количества
водородных
связей
вблизи
растворённой
молекулы
и,
следовательно, к понижению энтропии (из-за упорядочения). Энтальпия
переноса молекулы неполярного вещества из бесконечности в вакууме в воду
отрицательна
Результатом
из-за
этого
образования
является
дополнительных
то, что
свободная
водородных
энергия
связей.
перемещения
гидрофобной молекулы ΔG из бесконечности в воду складывается из двух
частей, благоприятствующей помещению в воду энтропии ΔH (отрицательна)
и препятствующей переносу энтропии ΔS (отрицательна). Это может быть
записано как
ΔG = ΔH − TΔS
(1.1)
При обычных температурах доминирует энтропийный член. Свободная
энергия переноса положительна, а перенос, таким образом, неблагоприятен, что
ведёт к очень низкой растворимости гидрофобных молекул в воде. ( Есть и
другая точка зрения /
3/,
основанная на анализе мицеллообразования в
интервале температур 25-66С°. Было показано, что свободная энергия перехода
мономера в ядро мицеллы практически не зависит от температуры (как
известно, при 66С° структура воды практически разрушена). Гидрофобный
эффект не должен, таким образом, зависеть от структуры воды. Эта гипотеза
подтверждена
исследованием
мицеллообразования
в
этиленгликоле
и
гидразине).
Одним из следствий гидрофобного эффекта является притяжение между
двумя неполярными молекулами растворённого вещества в воде: молекулам
выгоднее находиться
вблизи друг друга, чем на расстоянии. Это явление
интенсивно изучалось как с помощью компьютерного моделирования /4,5/, так
и теоретически /5,6,7/. Гидрофобный эффект ответственен как за огромное
число агрегационных структур, образованных амфифильными компонентами в
12
воде, так и за конформацию протеинов и других биомолекул в водных
растворах.
В диссертации исследуются микроскопические и макроскопические, т.е.
очень большие по сравнению с молекулярными размерами поверхности.
Иными словами, мы задаёмся вопросом: что произойдёт, если размер
растворённого включения возрастает так, что в результате, когда радиус
включений намного больше расстояния между ними, мы имеем случай двух
взаимодействующих поверхностей?
Очевидно, никаким простым способом невозможно экстраполировать
идею образования полостей в воде на случай больших тел.
Начиная с
некоторого размера, образование полости больше не является разумной
моделью для воды, и результатом гидрофобного включения в воду должно
быть полное исчезновение водородных связей. В обоих случаях контакт с
водой неблагоприятен с энергетической точки зрения, но роль энтропийного и
энтальпийного фактора для больших поверхностей становится совсем другой.
В случае гидрофобной поверхности энтропия и энтальпия положительны (это
означает, что
энтропийный член даёт отрицательный вклад в свободную
энергию), так как образование поверхности должно вести к уменьшению
водородных
связей
/8,9/.
Межфазная
энергия
уменьшается
с
ростом
температуры из-за увеличения с ростом температуры энтропийного члена,
благоприятствующего образованию поверхности /10/. Растворимость же
неполярных компонентов в воде, наоборот, уменьшается с ростом температуры
из-за того, что в этом случае энтропийный член имеет другой знак /7/. Таким
образом, было бы неверным предполагать, что термодинамика гидрофобной
поверхности подобна термодинамике растворённых гидрофобных молекул, и
что имеет смысл пытаться делать какое-либо количественное сравнение /11/.
13
1.2. Межфазная
энергия
границы
вода/гидрофобная поверхность.
Энергия границы раздела вода/гидрофобное включение намного больше,
чем предсказывает макроскопическая теория Лифшица. Разница, очевидно,
связана каким-то образом со структурой воды. Объёмные диэлектрические
константы, используемые в теории Лифшица, не учитывают структурные
изменения вблизи межфазной границы, такие как значительная реориентация
молекул воды вблизи гидрофобной поверхности. Во многих теориях
поверхностного и межфазного натяжения проблема решается путём разделения
поверхностного натяжения воды γ t на натяжение, обусловленное вкладом
дисперсионных сил γ d , и натяжение γ p , вызванное специфическим полярным
эффектом, так что /12/
γt = γ d +γ
p
(1.2)
Для гидрофобных тел γ t = γ d . Существует обширная литература,
связанная
с
приложениями
уравнений,
подобных
(1.2),
для
расчёта
поверхностных энергий и краевых углов.
Адгезия
между
двумя
гидрофобными
поверхностями
единичной
площади, погруженными в воду, равняется удвоенной межфазной энергии, так
как процесс удаления поверхностей на "бесконечное" расстояние создаёт две
гидрофобных поверхности, каждая – единичной площади. Аномально большая
энергия адгезии, а, следовательно, величина межфазной энергии между водой и
гидрофобной поверхностью, указывает на существование сильного притяжения
между макроскопическими гидрофобными поверхностями в воде.
1.3. Кавитация.
Если мы определим гидрофобную поверхность как поверхность, на
которой вода имеет наступающий угол θ a больше, чем 90° , то из уравнения
14
Юнга
будет
следовать,
что
прослойка
воды
между
двумя
такими
поверхностями будет метастабильной, начиная с некоторой толщины. Если
γ LV ,
γ SV и
γ SL
-
это,
соответственно,
поверхностная
энергия
воды,
поверхностная энергия гидрофобного твёрдого и межфазная энергия, то
γ SV = γ SL + γ LV cosθ a < γ SL
(1.3)
Таким образом, фазовый переход вода-пар энергетически выгоден.
Однако, термодинамический анализ предсказывает кавитацию только на
расстояниях порядка 1 нм, хотя точное расстояние зависит от геометрии
взаимодействующих поверхностей /13,14/.
1.4. Косвенные
наблюдения
гидрофобного
притяжения.
Вышеописанные эффекты указывают на то, что притяжение между
гидрофобными поверхностями термодинамически выгодно. В то же время,
ниоткуда не следует, что это притяжение может быть дальнодействующим.
Первое обсуждение возможности существования дальнодействующих
сил между гидрофобными поверхностями было, по всей видимости,
предложено Ласковским и Китченером /15/. Авторы наблюдали потерю
устойчивости суспензии кварцевых частиц при метилировании. Поскольку
было доказано, что сила электростатического отталкивания при этом
существенно не меняется, была выдвинута гипотеза о дополнительной силе
притяжения. Блейк и Китченер /16/ позже установили верхний предел радиуса
действия этой гидрофобной силы. Авторы исследовали прорыв смачивающих
плёнок на гидрофобной поверхности кварца и нашли, что прорыв наблюдался
на расстояниях меньше 64 нм (теория ДЛФО предсказывает устойчивость
таких плёнок
из-за
силы отталкивания ван-дер-Ваальса). Такая ситуация
возникает при флотации минералов, где эффективность процесса определяется
прилипанием гидрофобизованных частиц к воздушному пузырю. Прилипание
15
не возникло бы, если бы не было дальнодействующего притяжения через
прослойку воды между частицей и пузырём.
1.5. Силы
между
гидрофобными
поверхностями.
1.5.1. Методы измерения гидрофобных сил.
Почти все прямые измерения сил между гидрофобными поверхностями
были
проведены
в
двух
типах
поверхностных сил (SFA) и
приборов:
аппарате
для
измерения
атомно-силовом микроскопе (AFM). Другие
установки (/17,18/ и др.) по разным причинам
не получили массового
распространения. В данном разделе диссертации описываются принципы
измерения сил в различных приборах и даётся ответ на вопрос о том, почему
измерения поверхностных сил являются динамическими.
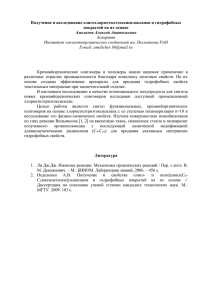
1.5.1.1. Прибор для измерения сил.
На
Рис.1 изображён аппарат для измерения поверхностных сил. Он
состоит из двух скрещенных цилиндров (радиуса 1-2 см). Геометрия
эквивалентна
эллиптическому
параболоиду,
взаимодействующему
с
плоскостью, или геометрии сфера-плоскость в случае цилиндров одинакового
радиуса /19/. Расстояние от микрона до контакта измеряется оптически с
использованием полос многолучевой интерференции (FECO) /20/. Две
прозрачных слюдяных пластинки (около 2 микрон толщиной) сначала
покрываются частично отражающим слоем (50-60 нм) чистого серебра и
приклеиваются на кварцевые диски посеребрённой стороной вниз. Белый свет
пропускается вертикально через две поверхности, и расщеплённый луч затем
фокусируется в
щели спектрометра. Из расположения и формы цветных
полос FECO на спектрограмме может быть определено расстояние между
поверхностями, их форма, а также показатель преломления среды между ними
16
/20/. Искомой величиной является сила в функции расстояния. В простейшем
случае (статическая версия SFA) поверхностная сила Fs
находится из
отклонения консольной пружины (характеризуемой постоянной K ), к которой
крепится
один
из
цилиндров
/20/.
Сила,
отнесенная
к
среднему
геометрическому радиусов цилиндров Rg = R1R2 , даёт, в соответствии с
аппроксимацией Дерягина, удельную энергию G взаимодействия плоских
поверхностей /19,21/:
Fs
= 2πG
Rg
Условие равновесия системы (баланс сил) соответствует равенству нулю
первой производной энергии системы по расстоянию. Чтобы это равновесие
было устойчивым, вторая производная должна быть положительной, что даёт
K > dFs / dh .
Считается,
что
когда
условие
устойчивости
нарушается,
расстояние между поверхностями меняется скачком, а большая часть кривой
сила-расстояние становится недоступной для измерений. Это означает, что
монотонно убывающая сила притяжения ведёт к скачку в положение контакта с
некоторого конечного расстояния. Общепринята точка зрения, что в этом
промежуточном режиме прямые измерения сил невозможны. Существует
несколько методов преодоления этой трудности. Одним из способов является
увеличение упругой постоянной пружины. Это, однако, ведёт к потере
чувствительности измерений силы. Другой путь – проведение серии измерений
толщин, при которых система теряет устойчивость, в функции
упругой
постоянной пружины. Это позволяет определить зависимость градиента силы
от толщины плёнки. Последний легко конвертируется в расклинивающее
давление Π между плоскими поверхностями
∂Fs
= 2πRg ⋅ Π
∂h
17
Считается, что проблемой такого метода измерения сил притяжения является
длительность измерений, необходимость задания математической модели Fs
для последующего интегрирования с целью вычисления силы, а также
сложность (а часто, как мы покажем ниже в диссертации, невозможность)
определения значения толщины потери устойчивости. Поэтому прибегают к
так называемому динамическому методу /22,23/. В этом методе конец пружины,
удалённый от цилиндра, двигается в направлении жестко закреплённого
цилиндра с постоянной скоростью. Пружина, таким образом, отклоняется под
действием как поверхностной Fs , так и гидродинамической Fh
силы.
Преимуществом этой техники является то, что измерения производятся
намного быстрее. Кроме того, механическая система становится устойчивее
(из-за присутствия дополнительной силы
„отталкивания“). В результате
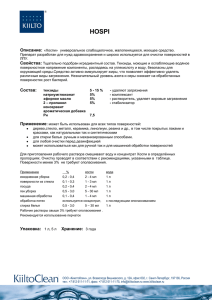
измерений получают серию кривых расстояние-время (Рис.2), из анализа
которых можно получить информацию о силах. Аппарат, обладая высокой
точностью измерения расстояния (0.1 нм), обычно, позволяет измерять время с
точностью до 0.02 сек.
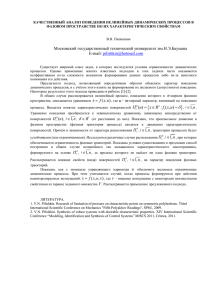
1.5.1.2.Атомно-силовой микроскоп
Атомно-силовой
микроскоп
был
изобретён
для
изучения
топографии
поверхностей /24/, но в последние годы становится важным инструментом для
измерения поверхностных сил /25,26/. В AFM сила измеряется не между двумя
макроскопическими поверхностями, а между сферой микронного размера и
плоскостью (Рис.3). Сфера крепится к микроконсоли или кантилеверу.
Плоскость фиксируется на осциллирующем пьезотрансляторе, поэтому
измерения всегда должны рассматриваться как динамические. Луч лазера,
направленный на кантилевер, отражаясь, фиксируется фотодетектором. Таким
образом, в отличие от SFA измеряется не расстояние между поверхностями, а
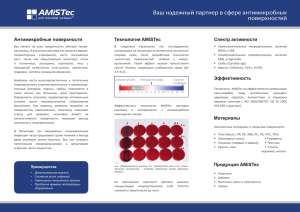
отклонение кантилевера в функции позиции пьезо. Динамические кривые,
получаемые в AFM, имеют, как видно из Рис.4, вид, отличный от кривых SFA.
18
дискретные длины
волн (FECO)
цилиндры
h
положение
невозмущенной
пружины
отклонённая пружина
белый свет
Рис.1
Отклонение консольной пружины под действием гидродинамической и/или
поверхностной силы, действующей на слюдяные цилиндры
19
Рис.2
Типичные динамические кривые, получаемые в SFA (снизу). Скорость
сближения увеличивается справа налево.
20
Фото
диод
Лазер
Отклонение
Δz
Сфера
h
Пластина
Пьезотранслятор
Рис.3
Отклонение микроконсоли (кантилевера) под действием поверхностной и/или
гидродинамической силы, действующей на сферу.
21
Рис.4
Типичные динамические кривые, получаемые в AFM . Скорость сближения
увеличивается снизу вверх.
22
1.5.2.Подготовка
гидрофобных
поверхностей к измерениям сил.
Все методы образования гидрофобной поверхности, пригодной для
измерения сил, можно, условно, сгруппировать следующим образом.
1. Адсорбция растворимых, обычно одноцепочечных, поверхностноактивных веществ из раствора на отрицательно заряженной поверхности, при
концентрации намного ниже критической концентрации мицеллообразования
(ККМ) /27,28,29,30,31/. В этом случае, если не предпринималось специальных
усилий, гидрофобные поверности были заряженными.
2.
Нанесение
нерастворимых
монослоёв
Лангмюра-Блоджетт
(двухцепочечные поверхностно-активные вещества (ПАВы) или липиды)
/23,32,33,34,35/. Такие поверхности, как правило, электронейтральны.
3. Химическая модификация поверхностей (слюды, кварца или стекла)
путём реакции с силанизирующим агентом /36,37,38,39,40/.
4. Использование непрозрачных поверхностей гидрофобных полимеров
/41,42/, металлов /43/ или минералов /44/.
1.5.3.Основные результаты.
1.5.3.1. Функциональная
зависимость
силы
от
расстояния.
Сила, полученная с помощью SFA и отнесённая к радиусу цилиндра, как
правило, убывала с расстоянием по экспоненциальному закону /27/ или закону
двух экспонент /45/. В последнем случае дальнодействующая экспонента
характеризовалась большой корреляционной длиной (до 20 нм) и малым
префактором
(≈
1
мН/м),
а
короткодействующая
экспонента
имела
корреляционные длины порядка 1 нм и предэкспоненциальный множитель
23
порядка десятых Н/м. В некоторых экспериментах было найдено, что сила
убывает по степенному закону с показателем степени –2.2-2.3 /23/. Кривая
сила/расстояние практически во всех экспериментах является гладкой, что не
наблюдается в альтернативной установке MASIF, где аналогичные кривые
имеют вид (много) ступенчатой функции /43,18/.
Результаты AFM измерений часто дают ту же функциональную
зависимость для силы /38/, хотя F / R g намного больше по абсолютной
величине,
чем
в
SFA.
С
другой
стороны,
силовая
кривая
иногда
характеризуется резким скачком в контакт из некоторого максимума, причём
это расстояние не зависит от постоянной пружины /46/.
1.5.3.2. Влияние краевого угла.
Какая-либо простая связь между радиусом действия силы гидрофобного
притяжения с краевым углом не была обнаружена. Например, очевидна
разница между результатами /29/ и /45/, хотя поверхности имели одинаковый
краевой угол, толщины адсорбированного и нанесённого слоёв были примерно
одинаковыми, а используемые ПАВы отличались только двумя метиловыми
группами в углеводородной цепи. В то же время, для поверхностей,
подготовленных одинаковым способом, иногда наблюдалось возрастание
притяжения с увеличением краевого угла /38/.
1.5.3.3. Влияние способа подготовки поверхности.
Способ
подготовки
поверхностей,
как
правило,
коррелирует
с
абсолютной величиной и радиусом действия силы притяжения. Несмотря на
несколько исключений, прежде всего в недавних публикациях /41,42,47/, можно
сделать следующие выводы.
1. Адсорбция ПАВ из раствора даёт силу притяжения, наблюдаемую до
расстояний порядка 30 нм /28,27,29,30,32/.
24
2. Поверхности, подготовленные нанесением слоёв Лангмюра-Блоджетт
/23,32,33,45/, дают притяжение, радиус действия которого порядка 100 нм. При
этом, замечанием, приложимым к почти всем экспериментам с нанесёнными
монослоями является то, что для нейтральных поверхностей было очень трудно
найти положение «захлопывания» - поверхности двигались в направлении друг
к другу в течение ≈ 30 сек с расстояния 30-40 и даже 50 нм. Это часто
требовало проведения динамического эксперимента.
3. Химическая модификация приводит к аналогичному дальнодействию
(50-100 нм) /17,18/. Дальнодействие порядка 300 нм, найденное для
полимеризованных ПАВ является исключением /34/.
4. Для поверхностей полимеров наблюдался разброс (12-400 нм) /42,46/.
1.5.3.4. Наблюдения кавитации.
Явление кавитации (косвенно) наблюдалось уже в работе /17/: гистерезис
силы, обнаруженный при сближении и сепарации поверхностей, указывал на
абсолютно разный закон убывания силы с расстоянием. Поведение системы
было таким, как будто кавитация возникала при контакте, а не на конечном
расстоянии.
Более систематические исследования кавитации осуществлялись как с
помощью измерения показателя преломления, так и с помощью оптического
микроскопа /33/. Оказалось, что кавитация зависит от типа поверхности. Так,
для углеводородов кавитационный пузырь не наблюдался в положении
контакта, но сепарация поверхностей давала
единичный кавитационный
мостик, не разрывающийся до расстояний 0.5-1.0 мкм. Для фтороуглеродов по
периметру контакта наблюдалось несколько мостиков меньшего размера. При
сепарации поверхностей эти мостики, как правило, коалесцировали в один
большой, который оставался устойчивым до расстояний в несколько микрон.
Важным следствием из SFA эксперимента был вывод о том, что
наблюдаемое притяжение не является прямым результатом кавитации.
25
Дальнодействующее притяжение измерялось в отсутствии видимой полости, а
сравнение кривых сила-расстояние в отсутствии и в присутствии полости
показало,
что
в
последнем
случае
сила
является
более
слабой
и
короткодействующей /10/.
1.5.3.5. Влияние электролита и температуры.
В
первых
экспериментах
цетилтриметиламмония
бромида
притяжение не зависит от
с
адсорбированными
(ЦTAБ)
казалось,
что
слоями
гидрофобное
концентрации электролита /29/. Первые
эксперименты со слоями Лангмюра-Блоджетт, наоборот, показали, что такая
зависимость может иметь место /45/.
/32,48/
показали,
нанесёнными
что
с
Более систематические исследования
добавлением
монослоями
электролита
ослабевает
и
притяжение
становится
между
более
короткодействующим. Позже было показано, что с увеличением концентрации
электролита предэкспоненциальный фактор уменьшается, а корреляционная
длина не меняется /35/.
Эксперименты с силанизированным стеклом ведут к
противоположному выводу /18/ о том, что электролит не влияет на притяжение.
Сообщения
о
температурной
зависимости
силы
гидрофобного
притяжения также противоречивы. Авторы /31/ заключили, что зависимость
гидрофобного притяжения от температуры даже сильнее, чем ожидалось бы
для гидрофобного эффекта между молекулами. В работе /49/, наоборот,
утверждается, что результаты, представленные в /31/, означают, что никакой
температурной зависимости не наблюдается. Напротив, авторы /18/ нашли, что
притяжение увеличивается с ростом температуры.
1.5.4.Теоретические представления.
Существование очень сильного и дальнодействующего притяжения
(несколько
сотен
молекулярных
диаметров) поставило
ряд
серьёзных
26
теоретических
задач.
Проблема
осложнялась
противоречиями
и
несогласованностями в экспериментальных результатах.
Было сделано несколько попыток объяснить механизм действия
гидрофобного притяжения. Первый подход был основан на изменении
структуры воды /50,51,52/. Однако, общепринято, что структурные эффекты в
воде убывают на расстояниях порядка 10 молекулярных диаметров (3 нм) /11/.
Поэтому считалось маловероятным, что такие теории способны предсказать
дальнодействующий характер гидрофобных сил. Другой подход основан на
гипотезе о том, что притяжение имеет электростатическую природу.
Электростатический механизм позволяет предсказать дальнодействие при
использовании разных моделей для объяснения абсолютной величины силы
/53,54,55,56,57/.
Электростатические
теории
предсказывают,
что
корреляционная длина взаимодействия пропорциональна Дебаевской длине.
Действительно, такая зависимость иногда наблюдается /47/, но в общем случае
модель не подтверждается экспериментом /48/. Недавние попытки объяснить
гидрофобное притяжение основаны на гипотезе метастабильности плёнки
/58,59/. Однако ни подтвердить ни опровергнуть эту гипотезу пока не удалось.
1.6. Скольжение
относительно
гидрофобной
поверхности.
1.6.1. Эксперимент.
Первооткрывателями скольжения (трения) между межфазной границей
твердое-жидкость часто называют Гельмгольца и фон Петровского /60/. Вывод
о проскальзывании был позже подтвержден Бродманом /61/. Результаты
интенсивно критиковались Ветхамом /62/, Ладенбургом /63/ и др., а вся
полемика была детально проанализирована Бингамом /64/. На этой ранней
стадии важность гидрофобизации для явления проскальзывания была ещё не
понята.
27
Проблема скольжения была вновь поставлена в начале века. Траубе и
Ванг /65/ сообщили, что поток воды через вискозиметр возрастал в несколько
раз после обработки капилляра олеиновой кислотой или другими полярными
соединениями. Вебер и Нойгебауэр /66/ интерпретировали эти результаты в
пользу
проскальзывания
воды
относительно
специально
обработанной
поверхности. Однако, позднее Таусц и Кёрёси /67/ показали, что эффект может
быть обусловлен не проскальзыванием, а влиянием олеиновой кислоты на
поверхностное натяжение воды и, в результате, на скорость капиллярного
поднятия. Примерно в тоже время аналогичный вывод о влиянии эффекта
изменения поверхностного натяжения на результаты был сделан Ронсереем
/68/, который изучал воду, капающую из конца капилляра, покрытого
парафином. Эти работы пытались связать проскальзывание со степенью
гидрофобизации поверхности, хотя сами авторы
это ещё не понимали.
Поэтому, несмотря на то, что результаты всё еще не подтверждают гипотезу
гидрофобного проскальзывания, вышеупомянутые статьи являются важным
вкладом в решение проблемы.
Первым достоверным результатом для воды был, вероятно, результат
Шнеля /69/, который обнаружил скольжение воды в стеклянном капилляре,
обработанном парами диметилхлоросилана. Чураев и др. /70/ также сообщили о
проскальзывании воды в очень тонком кварцевом капилляре, обработанном
триметилхлоросиланом. Недавно, Киселёва и др. /71,72/ нашли скольжение для
водных растворов ЦТАБ в тонком капилляре с адсорбированным слоем ЦТАБ.
Таким образом, число экспериментов, подтверждающих гипотезу скольжения
воды относительно гидрофобной поверхности, неуклонно возрастает.
Явление,
по
всей
видимости,
не
ограничено
границей
раздела
вода/гидрофобная поверхность и должно быть обобщено на все системы с
несмачивающей жидкостью. Так Толстой /73/ и Сомов /74/ измеряли
скольжение ртути в стеклянных капиллярах, а Чураев и др. нашли
проскальзывание ртути в кварцевых капиллярах /70/. Проскальзывание жидких
28
углеводородов относительно стекла отмечалось Дебаем и Клеландом /75/.
Редон и др. нашли скольжение при исследовании динамики прорыва
ультратонких полимерных плёнок на гидрофобной поверхности /76/, а Инн и
Ванг
/77/
для
стеклянных
сфер,
покрытых
фторосиланом,
в
полидиметилсилоксане. (Следует отметить, что хотя скольжение полимеров
/78,79/ существенно отличается от гидрофобного проскальзывания, нельзя
полностью исключить вклад гидрофобности поверхности в возрастание потока
расплава полимера). И, наконец, Пит и др. /80/ нашли проскальзывание
гексадекана с добавками стеариновой кислоты относительно лиофобной
поверхности сапфира.
1.6.2. Модели проскальзывания.
Попытки связать проскальзывание с другими параметрами гидрофобной
поверхности делались рядом авторов. Ниже приводятся их аргументы.
1.6.2.1. Молекулярное скольжение.
Один из ранних подходов основан на предположении существования
молекулярного проскальзывания, т.е. на гипотезе, что молекулы жидкости
непосредственно скользят по твердой поверхности. Следует подчеркнуть, что
общепринятое условие непрерывности скорости на границе раздела фаз
является не точным законом, а утверждением, что это должно, как правило,
произойти в нормальных условиях
/81/. Строго говоря, не существует
обоснования граничных условий прилипания, кроме как основанного на
идеализации явлений переноса. Требование непрерывности скорости следует из
того факта, что любой скачок в скорости в объёме жидкости привел бы к
огромным напряжениям, стремящимся вернуть её в исходное состояние.
Справедливость условия отсутствия проскальзывания на границе раздела фаз
не столь очевидна. Так, например, всё ещё существуют сомнения в том, что
молекулярные взаимодействия на границе твердое/жидкость ведут к переносу
29
импульса той же природы, что и в объёме жидкости. Как правильно указали
Боке и Барра /82/, граничное условие прилипания не имеет микроскопического
обоснования. С другой стороны, отсутствие скачка в скорости на гидрофильной
поверхности
является
фактом,
неоднократно
подтверждённым
экспериментально. Течение около гидрофобной поверхности может быть
важным исключением из правила /83/. Это может следовать из того факта, что
притяжение между молекулами жидкости (воды) сильнее, чем между
жидкостью и твердым.
Ранняя
молекулярная
теория
проскальзывания
была
предложена
Толстым /84/ и связывает подвижность молекул жидкости с межфазной
энергией
(краевым
углом).
Теория
была
позже
проанализирована
и
пересмотрена Блэйком /85/. Последний применил теорию Толстого для расчета
проскальзывания и потока жидкости через капилляр, а также произвел
сравнение
с
экспериментом.
Экспериментальные
результаты
иногда
находились в очень хорошем согласии с теорией. Однако, Руккенштейн и
Раджора /86/ показали, что найденные в эксперименте длины проскальзывания
означали бы наличие аномально большого коэффициента поверхностной
диффузии (больше чем у газа в объёме).
Недавние
расчёты
с
использованием
метода
неравновесной
молекулярной динамики (MD) показали, что для достаточно большого краевого
угла микроскопические граничные условия отличаются от условий прилипания
/87,88/. Теория предсказывает длину скольжения порядка 30 молекулярных
диаметров, начиная с θ ≈ 140o , а также зависимость b от давления, что не
наблюдается в эксперименте. Одним из нереалистичных предположений
теории является используемое условие постоянства температуры (термостат
Гувера) и, следовательно, отсутствия диссипации энергии в сдвиговом потоке,
находящемся
вдали
от
равновесия.
Кроме
того,
авторы
используют
равновесные значения межфазных натяжений, краевого угла и т.д. В другой
30
MD работе /89/ скольжение найдено только для скоростей сдвига порядка 109
сек-1, что не согласуется с экспериментом.
Таким
образом,
молекулярного
все
известные
проскальзывания
на
сегодняшний
противоречивы,
хотя
день
вопрос
модели
о
его
возможности остается открытым.
1.6.2.2. Гипотеза газовой прослойки.
Отсутствие внутренней самосогласованности молекулярных теорий
привела к предположению о том, что проскальзывание жидкости относительно
твердой стенки является кажущимся. Чтобы объяснить высокую подвижность
молекул жидкости вблизи гидрофобной стенки Руккенштейн и Раджора /86/
предположили наличие газовой прослойки между жидкостью и твердым.
Аналогичная идея обсуждалась Руккенштейном и Чураевым /90/. Однако, эта
гипотеза не подкреплена никакими соображениями по поводу причин
образования слоя газа ( θ =180°) на частично несмачиваемой поверхности.
1.7. Выводы по главе 1.
1. Эксперименты в SFA и AFM позволяют заключить, что погруженные
в водные растворы гидрофобные поверхности притягиваются на расстояниях
до 100 нм. Сила притяжения не определяется однозначно краевым углом и
слабо зависит от параметров раствора. В то же время, кривая сила-расстояние
чувствительна к способу подготовки поверхностей. Эффект, скорее всего,
неэлектростатической природы и не связан с изменением структуры жидкости.
2. В тонких гидрофобных капиллярах наблюдается увеличение потока
жидкости по сравнению с ожидаемым при выполнении условия прилипания,
что может быть интерпретировано в пользу проскальзывания жидкости. Все
существующие
противоречивы.
модели
гидрофобного
проскальзывания
внутренне
31
2. ВЛИЯНИЕ РАСТВОРЁННОГО ГАЗА НА СВОЙСТВА ТОНКОГО
СЛОЯ ЖИДКОСТИ МЕЖДУ ГИДРОФОБНЫМИ
ПОВЕРХНОСТЯМИ.
Вторая глава посвящена влиянию растворённого газа на структуру и
свойства тонкого слоя жидкости, заключённого между гидрофобными
поверхностями /91/.
2.1. Введение.
Растворённым газом пренебрегают как во всех теориях коллоидной
физики, так и в физической химии. В то же время все жидкости, используемые
в реальных физико-химических и коллоидных экспериментах, включая
интересующую нас воду, находятся в равновесии с атмосферой. Следовательно,
они должны рассматриваться как насыщенный и разбавленный раствор газа в
жидкости. Например, концентрация газа в воде при обычных температурах и
атмосферном давлении составляет 5 × 10−3 М, а в жидких углеводородах – в 10
раз выше. Поскольку это сильно разбавленный раствор, наличие газа не должно
сказываеться на объёмных свойствах водных растворов, таких, например, как
плотность. Одним из исключений являются процессы кавитации (оптической,
акустической и т.д.). На сегодняшний день последние удалось описать только в
рамках моделей, основанных на существовании в водных растворах газовых
нанопузырей /92,93/. В таких моделях наличие пузырей постулируется,
поскольку вопросы их образования и устойчивости до сих пор не решены.
Экспериментальная проблема состоит в том, что субмикропузыри невидимы и,
следовательно, не могут быть обнаружены с помощью современных
оптических методов (хотя их наличие косвенно подтверждено в экспериментах
по рассеянию /94,95/). Теоретическая проблема состоит в том, что даже
образовавшись,
такие
пузыри
должны
немедленно
раствориться
/96/.
32
Поскольку вода не является идеальной системой, существование таких
нанопузырей, служащих зародышами кавитации вдали от точки кипения,
может быть не обязательно связано с внутренними свойствами самой воды.
Они могут образовываться из-за конвекции, локальных перепадов давления и
температуры, наличия следов ПАВ и т.д. В то же время, помещение такого
насыщенного раствора в тонкую щель между гидрофобными поверхностями
неизбежно вызовет нуклеацию газа. Это связано с тем, что толщина плёнки
действует как дополнительная переменная поля, давая дополнительный член в
выражении для большого термодинамического потенциала, уравнении Гиббса
и т.д. /97/. Следствием этого является то, что в тонком слое жидкости между
твёрдыми поверхностями кривые фазового равновесия смещены по сравнению
с кривыми для объёма раствора. Таким образом, помещение насыщенного
раствора
газа
в
тонкую
щель
между
гидрофобными
поверхностями
эквивалентно изменению состояния системы таким образом, что она
оказывается в метастабильной области. Расствор газа может, следовательно,
расслаиваться, причём (в соответствии с правилом рычага) количество
выделенного газа должно увеличиваеться с уменьшением расстояния между
гидрофобными поверхностями. Для качественной проверки этого утверждения
нами используется разработанный ранее метод оптической кавитации /93/.
Метод основан на том, что вероятность оптической кавитации коррелирует с
концентрацией газовых субмикропузырей в жидкости.
33
2.2. Субмикрополости
вблизи
гидрофобной
поверхности. Эксперимент по оптической
кавитации.
2.2.1.
Материалы и метод.
2.2.1.1.
Оптическая
кавитация
Измерения оптической кавитации.
исследовалась
в
экспериментальной
установке,
представленной на Рис.5 и описанной в работах автора /91,98,99,100/. Импульс
YAG:Nd3+ лазера (длина волны λ = 1.06 мкм, продолжительность импульса τ =
11.5 нсек) фиксированной энергии изолировался из пучка импульсов и
направлялся с помощью линзы в сторону кюветы. Использовались две
конструкции кюветы. В первой конструкции кювета состояла из двух гладких
стеклянных пластин, разделённых тефлоновой прокладкой толщиной 25 мкм и
каплей воды, зажатой между пластинами. Пластины закреплялись держателем
и термостатировались. Температура термостата поддерживалась с точностью
± 0.1 °С.
При изучении кавитации в тонкой кювете, фокус линзы должен
находиться вне её. В эксперименте кювета располагалась перед фокусом. В
результате диаметр лазерного пятна внутри кюветы был приблизительно 1 мм,
т.е. фокусировка была нежёсткой. Это вело к интенсивности излучения,
достаточной для
образования кавитационного (микро)пузыря, но не
достаточной для образования искры (отсутствие оптического пробоя при
наличии оптической кавитации) на границе раздела раствора с гидрофобной
поверхностью. Таким образом, гидрофобная поверхность не подвергалась
сильному термическому воздействию.
Область кюветы, “обстреливаемая”
лазерными импульсами, анализировалась визуально с помощью оптического
микроскопа на предмет наличия кавитационного пузыря. Кроме того,
оптический микроскоп позволял проконтролировать, что в результате импульса
34
кювета не повреждена, а раствор не загрязнён. Кювета монтировалась на
двухкоординатный
стол,
позволяющий
перемещать
её
в
плоскости,
перпендикулярной лазерному лучу. После эмиссии каждого импульса кювета
перемещалась
в
новое
положение.
Вторая
конструкция
кюветы
предназначалась для исследования относительного изменения вероятности
оптического пробоя вблизи межфазной поверхности вода/воздух по сравнению
с объёмным случаем. В этом случае кювета была большего размера, а
фокальный объём находился внутри неё. Несмотря на то, что фокусировка
была достаточно жёсткой, луч лазера не повреждал стенок кюветы. Фокальный
объём находился на расстоянии порядка 1 см от стенок кюветы, а фронт
высокого давления и температуры резко уменьшался на расстоянии несколько
миллиметров от центра лазерной вспышки. При реализации этого эксперимента
кювета могла перемещаться также и в вертикальном направлении, что
позволяло изучать вероятность пробоя на различных уровнях кюветы, включая
область вблизи границы с воздухом. Благодаря вогнутой форме мениска,
оказалось возможным направить луч касательно границы раздела фаз. К
сожалению, не удалось изучить пробой вблизи твёрдой (гидрофобной или
гидрофильной) поверхности. Чтобы доказать, что результат не связан с
загрязнением раствора, эта конструкция кюветы также использовалась
для
изучения пробоя в воде и водных растворах, содержащих частицы,
поглощающие лазерное излучение, а также в отгазованной воде.
2.2.1.2.
Приготовление
растворов
и
поверхностей.
Готовились концентрированные растворы (2М) четырёх водных 1:1
валентных электролитов (KCl, KBr, NH4Cl
и CH3COONa). Чистота солей
превышала 99 или 99.5%. Перед измерениями концентрированные растворы
разбавлялись с целью приготовления растворов в диапазоне концентраций от
0.05 до 1М. Использовался бидистиллят с электропроводностью 2 × 10−6 Ω −1 см-1
35
Рис.5.
Сверху – схема установки для исследования оптической кавитации: 1 –
неодимовый лазер, 2 – линза, 3 – кювета, 4 – термостат, 5 – микроскоп, 6 –
двухкоординатный стол, 7 – компьютер, 8 – устройство для контроля энергии
излучения. Снизу – кюветы для исследования кавитации: тонкая (слева) и
толстая (справа)
36
и pH 6.5. Растворы электролитов всегда находились в контакте с атмосферой и,
следовательно, содержали растворённый газ.
Все стеклянные изделия очищались хромовой кислотой и пероксидом
водорода и промывались затем бидистиллированной водой. Стеклянные
пластины, приготовленные таким способом, считались гидрофильными, так как
они полностью смачивались водой. Гидрофобизация пластин осуществлялась
путём реакции с диметилдихлоросиланом. Для этого пластины помещались в
пары силана на 48 часов. В этих условиях, хемосорбция силана на стекле вела к
образованию поверхности с θ a = 92 − 97 º. Эксперимент показал, что не
существует разницы в краевом угле между каплей воды и каплей 1М растворов
KCl, KBr и NH4Cl. Небольшое количество CH3COONa ведёт к заметному
уменьшению краевого угла θ a = 65 − 70 º. Дальнейшее увеличение концентрации
не меняет угол. Однако, при концентрации 1М наступающий угол снова
возрастает, что может быть связано с образованием второго адсорбционного
слоя CH3COO-.
Для моделирования возможного влияния адсорбированных примесей на
оптический пробой использовался активированный уголь. Средний размер
частиц составлял 1 мкм. Готовились суспензии с различным содержанием
твёрдой фазы.
Для некоторых экспериментов по оптическому пробою бидистиллят
подвергался обезгаживанию с помощью вакуумного насоса и с использованием
ловушки из жидкого азота. Перед обезгаживанием вода кипятилась в течение
1.5 часов, затем быстро охлаждалась и подвергалась трём последовательным
операциям замораживания и плавления при одновременной отгазовке. При
этом достигался вакуум не менее 10-3 Торр.
37
2.2.2.
Результаты.
2.2.2.1.
Влияние электролитов.
Эксперимент проводился в кювете первой конструкции. Интенсивность
лазерного импульса была изменяемым параметром эксперимента. Она
выбиралась таким образом, что вероятность кавитации чистой воды при 20ºС в
тонком слое между гидрофильными поверхностями составляла w0 ≈ 0.02 .
Иными словами, два «выстрела» из ста индуцируют кавитацию.
Такая
ситуация реализовывалась при интенсивности излучения I ≈ 109 Ватт/см2. В тех
же условиях и при той же энергии на входе измерялась вероятность кавитации
w1 в слое между гидрофобными поверхностями. При температуре 20º С
отношение w1 / w0 составляло 3-4. Некоторый разброс, видимо, связан с
наличием факторов, не поддающихся контролю в каждой новой серии
(неоднородности метилирования, флуктуации энергии лазерного луча и т.д.).
Например, в одной из публикаций /100/ найдено, что для чистой воды w1 / w0
несколько отличается от приводимого здесь результата. Причиной этого
является то, выбор w0 для чистой воды произволен, важно только то, что w1 и
w0 меньше единицы, что в работе /100/ условия эксперимента (интенсивность
лазерного излучения) были другими. Таким образом, w0 также была другой.
Следует напомнить ещё раз, что т.е. используемая процедура должна
гарантировать
вероятностный
характер
оптической
кавитации.
После
исследования водных слоёв, изучалась вероятность кавитации в тонких слоях
растворов электролитов. Результаты для различных 1:1 электролитов при 20ºС
представлены на Рис.6.
38
Рис.6.
Вероятность оптической кавитации w в функции концентрации соли C
для тонкого слоя CH3COOH (a), KBr (b), KCl (c) или NH4Cl (d), заключённого
между двумя гидрофобными (+) или двумя гидрофильными (o) поверхностями.
Точки слева соответствуют случаю чистой воды.
39
Во время эксперимента были сделаны следующие ниблюдения.
Микроскопический кавитационный пузырь имел размер, сопоставимый с
толщиной кюветы, т.е. около 10-20 мкм. В случае гидрофильной поверхности
периметр трёхфазного контакта имел форму идеальной окружности. Если
размер такого пузыря был меньше толщины кюветы, то он отрывался от её
поверхности и всплывал. В случае гидрофильных поверхностей, независимо от
размера, микропузырь оставался прилипшим к стенке, а линия трёхфазного
контакта
слегка
отличалась
от
окружности
и,
видимо,
зависела
от
неоднородностей гидрофобизации /100,101/.
2.2.2.2.
Влияние растворённого газа.
Одно наблюдение, сделанное при проведении экспериментов в тонкой
кювете для всех солей и всех используемых концентраций , указывает на то,
что в процессе кавитации растворённый газ играет ключевую роль. А именно,
когда кавитационный пузырь отрывался от гидрофильной поверхности,
лазерные
"выстрелы",
сделанные
немедленно
после
всплывания,
не
индуцировали кавитацию.
Эффект растворённого газа исследовался в кювете второй конструкции,
где изучалась вероятность кавитации в функции расстояния от границы раздела
с газом. Интенсивность излучения в этом эксперименте составляла I ≈ 1010
Ватт/см2. Установлено, что изменения в вероятности оптической кавитации
наблюдаются только в приповерхностном слое менее 1 мм. К сожалению,
используемая экспериментальная техника не позволяет сделать более точную
оценку. Этот результат не может быть связан в возможным возрастанием
концентрации примесей вблизи границы с воздухом. Влияние таких частиц,
адсорбирующих радиацию, моделировалось путём добавления в воду и
растворы электролитов порошка углерода. При этом во всех случаях
наблюдалось
резкое
уменьшение
вероятности
пробоя
с
повышением
40
концентрации суспензии. Следовательно, интенсивности лазерного луча было
недостаточно для того, чтобы стимулировать пробой. По всей видимости это
связано с тем, что радиация поглощалась перед фокальной областью, а также с
термической дефокусировкой в фокальном перешейке.
Существенное снижение вероятности пробоя было также найдено для
отгазованной воды. Установлено, что во всём диапазоне интенсивностей
излучения, обеспечивающих вероятностный характер кавитации в обычной
воде, никакого пробоя для обезгаженной воды не наблюдается. Чтобы вызвать
первую искру в обезгаженной воде, было необходимо увеличить энергию
лазерного импульса в 10 раз по сравнению с соответствующей вероятностному
характеру пробоя в воде в контакте с атмосферой. При этом энергия луча
составляла 0.5 Дж! Эти результаты позволяют утверждать, что наблюдаемые
эффекты не связаны с присутствием примесей /91/.
2.2.3.
Обсуждение.
Результаты показывают, что существует зависимость вероятности
оптической кавитации от типа электролита, его концентрации, характеристик
твёрдой поверхности и растворённого газа. Ранее было показано, что
вероятность
оптической кавитации служит методом оценки концентрации
субмикрополостей. Если исходная модель верна, то полученные результаты
могут быть интерпретированы в терминах субмикрополостной структуры.
Ниже даётся (на качественном уровне) попытка такого объяснения.
Найдено, что для всех концентраций и для всех солей вероятность
кавитации в слое между гидрофобными поверхностями в несколько раз выше,
чем в случае гидрофильных поверхностей. В соответствии с моделью
оптической
концентрации
кавитации,
это
субмикропузырей
означает,
вблизи
что
обнаружено
гидрофобной
возрастание
поверхности или
непосредственно связанных с ней /98,102,103/. Кроме того, получены
41
убедительные подтверждения того, что эффект обусловлен, в основном,
наличием растворённого газа /103/.
Важным результатом является то, что несколько 1:1 электролитов дали
не только разную величину вероятности оптической кавитации, но и
качественно разное поведение, что указывает на то, что состояние
образованных субмикрополостей может (частично) определяться адсорбцией
ионов. В настоящее время не существует теории, позволяющей объяснить
адсорбцию ионов на границе жидкость/газ, или даже масло/вода или на других
(незаряженных) поверхностях. Простейшая модель Онзагера-Самараса /104/
представляет собой линейную теорию, не зависящую от типа электролита и
предсказывающую десорбцию ионов. Однако, исследования поверхностного
заряда свободных плёнок в функции рН /105/, электрокинетические измерения
/106,107/ и другие исследования тонких плёнок /108/ позволяют заключить, что
межфазная граница вода/воздух заряжена, что заряд отрицателен и по всей
видимости обусловлен избытком ОН- ионов по сравнению с Н+. (При этом,
конечно, нельзя исключить участия в процессе заряжения ионов HCO3- результата диссоциации СО2. Адсорбируются ли эти анионы, или же просто
способствуют повышению адсорбции ОН- остаётся открытым вопросом). Более
того, установлено, что изменения поверхностного натяжения с концентрацией
электролита зависят от типа ионных пар /109/. Попытка дать предварительное
объяснеие этим явлениям дана в статье автора /110/ и базируется на учёте
ионных дисперсионных взаимодействий.
2.3. Выводы к главе 2.
1. Особые свойства жидкости в тонком слое между гидрофобными
поверхностями могут быть связаны с неизбежными процессами нуклеации
растворённого газа.
42
2. Методом оптической кавитации получены доказательства того, что
такой
слой
характеризуется
повышенной
концентрацией
газовых
субмикрополостей. Такая структура газовых субмикрополостей зависит от
концентрации газа и электролита в исходном объёмном растворе.
43
3. ПРОСКАЛЬЗЫВАНИЕ ЖИДКОСТИ ОТНОСИТЕЛЬНО
ГИДРОФОБНОЙ ПОВЕРХНОСТИ.
3.1. Содержание и цели главы.
Первая цель состоит в том, чтобы извлечь несколько фундаментальных
фактов из полученных (не только
автором) данных по проскальзыванию
(Раздел 3.2). В главе будет продемонстрировано, что эксперимент может быть
описан количественно, если допустить, что относительная скорость жидкости
на границе раздела фаз пропорциональна напряжению сдвига. Будет также
предложена новая модель проскальзывания. Вторая цель – исследовать
влияние проскальзывания
в поведении тех гидрофобных систем, где им,
обычно, пренебрегают, но оно может играть важную роль. Основное внимание
будет сфокусировано на задачах теории смазки. В разделе 3.3 исследуется
гидродинамическое взаимодействие искривлённых тел, как жёстких, так и
упругих, позволяющих проскальзывание на их поверхности. Основной
результат будет состоять в том, что вклады геометрии системы и
проскальзывания могут быть разделены. Геометрический фактор выражается
только через инварианты уравнения искривленных поверхностей, а поправка на
проскальзывание одинакова для любой геометрии и зависит только от
отношения толщины пленки к длинам скольжения взаимодействующих
поверхностей. Выводы по главе сформулированы в разделе 3.3.
3.2. Граничные
условия
на
гидрофобной
поверхности.
3.2.1.
Основные факты.
Цель этого раздела -
понять, как измеряется возрастание потока
жидкости в капилляре, каким образом это возрастание может быть
44
интерпретировано в терминах длины скольжения, а также, как последняя
зависит от параметров системы. Хотя в последние годы появились сообщения
об использовании новых методов, таких как Quartz-Crystal Microbalance (QCM)
/111/ и Total Internal Reflection – Fluorescence Recovery After Photobleaching
(TIR-FRAP) /80/, измерения в тонких капиллярах остаются основным методом
получения информации о скольжении жидкостей.
3.2.1.1.
Эксперимент.
Исследование гидрофобного проскальзывания требует очень тщательной
подготовки эксперимента. Три основных причины, описанные ниже, могут
существенно повлиять на его результаты.
(а)
Шероховатость
поверхности
приводит
к
кажущемуся
проскальзыванию, не связанному с гидрофобностью /112,113/. Более того,
будучи гидрофобной, такая шероховатая поверхность может содержать
захваченный газ, что выразится в дополнительном увеличении потока.
(б) Химическая неоднородность, или неоднородная гидрофобизация
твердой поверхности может также сыграть важную роль в явлении
проскальзывания /114/. Ниже в диссертации приводятся оценки возможного
влияния таких неоднородностей на результаты измерений.
(в)
Эффект
поверхностного
натяжения.
Ранние
эксперименты,
основанные на исследовании капиллярного поднятия или капель в воздухе
могли быть интерпретированы в терминах поверхностного натяжения. Чтобы
избежать этой двусмысленности необходимо использовать большой перепад
давления,
что
делает
капиллярное
давление
мениска
в
капилляре
пренебрежимо малым.
На Рис.7 представлена схематическая диаграмма установки, предложенной
Чураевым и др. /70/. Тонкий гидрофобный капилляр вставлен в перегородку,
разделяющую установку на две части с давлениями
P1
и P2 . Поток через
капилляр, таким образом, возникает благодаря перепаду давления. Один конец
45
горизонтального капилляра погружен в резервуар с водой, а второй конец
вклеен в гидрофильный кварцевый капилляр большого радиуса (около 200
микрон). Измеряемой величиной является скорость движения мениска в
гидрофильном капилляре. Поскольку приложенное давление всегда намного
выше капиллярного давления мениска (десятки атмосфер), последним всегда
пренебрегали. Тонкие капилляры изготавливались из кварцевых трубок и
имели
молекулярно
гладкую
поверхность.
Радиусы
капилляров
контролировались двумя способами (по расходу и по капиллярному давлению
полностью смачивающей жидкости) и составляли от нескольких микрон до
менее одного микрона. Тонкий капилляр гидрофобизовали путем стандартной
реакции метилирования /70/ а также обработкой ЦТАБ /71/. Наступающий
краевой угол для воды расчитывался исходя из давления, необходимого для
начала движения мениска и существенно менялся вдоль оси гидрофобного
капилляра. Основной вклад в ошибку определения краевого угла вносят
измерения давления. Эта ошибка намного меньше разброса в средней величине
θ a . Следовательно, последний обусловлен неоднородностью гидрофобизации
вдоль оси капилляра.
Суммируя, эксперимент позволяет избежать ошибок, связанных с
шероховатостью и вкладом поверхностного натяжения. Однако, результаты
всегда в той или иной степени осложнены химической неоднородностью
стенок капилляра.
3.2.1.2.
Результаты и интерпретация.
Основные наблюдения таковы:
(а) При высокой степени гидрофобизации поверхности обнаружено
экспериментально различимое увеличение потока воды по сравнению с
потоком тетрахлорида углерода, являющимся смачивающей жидкостью с той
же вязкостью, что и у воды (Рис.8). Относительное увеличение расхода воды
46
через капилляр имело тенденцию возрастать обратно пропорционально радиусу
капилляра. Эффект не наблюдался при θ a менее 70о.
(б) Отсутствовала явная зависимость возрастания потока воды от
среднего наступающего краевого угла вдоль оси капилляра. Иными словами,
для капилляров примерно одного радиуса и того же θ a возрастание потока
могло существенно различаться.
(в) Возрастание потока было тем больше, чем более однороден был
краевой угол вдоль оси капилляра.
Различия между экспериментальными наблюдениями и ожидаемым
потоком
воды
через
проскальзывания.
капилляр
могут
быть
объяснены
наличием
Предполагая, что скорость жидкости на стенке vs
пропорциональна напряжению сдвига
vs = b
∂vb
,
∂n
(3.1)
где vs - скорость жидкости, n - ось, перпендикулярная стенке, а b - так
называемая
длина
проскальзывания,
т.е.
произведение
коеффициента
скольжения на объемную вязкость. Очевидно, что длина скольжения
представляет
собой
расстояние
от
стенки,
на
котором
скорость
экстраполируется до нуля. Если длина спроскальзывания постоянна вдоль оси
капилляра z, поток через капилляр (пропорциональный скорости движения
мениска) может быть представлен как /115/:
Q=−
где
q* = 1 +
π ∂P 4
R q*,
8μ ∂z
(3.2)
4b
и ∂P ∂z равно − ΔP L , где ΔP > 0 - перепад давления между
R
концами капилляра, а L - его длина (концевыми эффектами мы здесь
пренебрегаем). Таким образом, поток через капилляр есть произведение
выражения для потока, полученного в предположении выполнения условия
прилипания, и поправки на скольжение. Поправка на скольжение зависит
47
Рис.7.
Схема установки по измерению проскальзывания воды в тонких
гидрофобных капиллярах: (1) гидрофобизиванный кварцевый капилляр, (2)
гидрофильный кварцевый капилляр большого радиуса, (3) микроскоп, (4) вода,
(5) эпоксидный клей, (6) металлический держатель, (7) перегородка, (8)
тефлоновый резервуар.
48
только от отношения длины скольжения к радиусу капилляра. Величина b
расчитана из наклона прямых на Рис.8 и составила, в широком интервале
размеров капилляров и перепада давлений, b = 30 ± 20 нм для θ a > 90 o .
Некоторые
наблюдения
(расброс,
появление
экспериментально
различимого проскальзывания только при высокой степени гидрофобности и
т.д.), вероятно, связаны с неоднородностями метилирования. Автором
диссертации было показано /114,116/, что анализ течения жидкости вблизи
неоднородно
гидрофобизированного
сектора
требует
решения
бигармонического уравнения для функции тока Φ( y, z )
∂ 4Φ
∂ 4Φ
∂ 4Φ
2
=0
+
+
∂y 2 ∂z 2 ∂z 4
∂y 4
с неоднородными граничными условиями
∂Φ
= 0 при y = ±1 ,
∂z
∂Φ
∂ 2Φ
= m b( z ) 2 при y = ±1
∂y
∂y
Функция тока связана с проекциями скорости w и v уравнениями
w=
∂Φ
∂Φ
, v=−
∂y
∂z
В общем случае, решение может быть получено только численно. Однако,
результат может быть понят исходя из рассмотрения простой модели,
предполагающей, что размер участка с переменной длиной проскальзывания
намного больше полуширины капилляра, а разные участки перекрываются
слабо. Математически это может быть выражено как b = b(εz ), ε << 1 и
bi b j ≈ O (δ ), δ << ε .
Существование
неоднородностей
такого
масштаба
наблюдалось во всех экспериментах в тонких капиллярах. Так, например, в
экспериментах /70/ длина микронных и субмикронных капилляров составляла
49
Рис.8.
Типичная зависимость скорости движения мениска в широком
гидрофильном капилляре от перепада давления для воды (+) и тетрахлорида
углерода (о) в гидрофобном кварцевом капилляре.
50
5-10 см, а расброс наблюдался для контактного угла, измеряемого через 1-2 см.
Решение для функции тока и единичного скользкого участка имеет вид /114/
Q
Qy ( y 2 − 1)
+ O(ε 2 )
Φ= y−
2
4(3b + 1)
Отсюда
y2 −1 '
3
v = − Qy
bz + O(ε ),
4
(3b + 1) 2
Q Q(3 y 2 − 1)
w= −
+ O(ε )
2
4(3b + 1)
1 ∂p
3Q 1
=−
μ ∂z
2 3b + 1
Можно показать, что в случае нескольких скользких секторов b = c + bi , где
c ≥ 0 есть некоторая константа (фон), функция тока имеет вид
N
Φ(N ) ≈ ∑ Φi +
i =1
N −1
N − 1 Qy ( y 2 − 1)
,
Qy −
⋅
2
3c + 1
4
а давление (с точностью до аддитивной постоянной) есть
N
p ( N ) = ∑ pi −
i =1
3( N − 1)
Qz
2(1 + 3c)
Иными словами, с помощью
методов масштабирования показано, что
вышеперечисленные допущения означают что
(а) проекция скорости w на ось z намного больше по величине, чем
проекция v на перпендикулярную z ось y (Рис.9),
(б) в первом приближении давление является функцией только z ,
(в) вклад различных гидрофобных секторов в поток аддитивен.
В результате этих допущений установлено, что:
1. Длина проскальзывания, рассчитанная исходя из увеличения потока в
предположении однородной гидрофобизации, может сильно отличаться от
средней длины проскальзывания вдоль оси капилляра.
51
2. Если гидрофобизация неоднородна, то длина проскальзывания,
рассчитанная исходя из увеличения потока в предположении однородной
гидрофобизации, всегда меньше средней длины проскальзывания.
3.2.2. Модель проскальзывания.
В диссертации предлагается
модель кажущегося проскальзывания,
которая подобна модели, принятой в физике полимеров /78,79/. Модель
связывает проскальзывание со снижением вязкости граничного слоя жидкости
вблизи
гидрофобной
поверхности
/117,118/.
Макроскопически
эффект
снижения вязкости может проявиться как течение с проскальзыванием (см.
Приложение 1).
Если вязкость граничного слоя может быть охарактеризована средней
величиной η s , то порядок величины b может быть оценен как
⎛η
⎞
b = δ ⎜⎜ b − 1⎟⎟
⎝ ηs
⎠
(3.3)
где δ - толщина слоя с измененной вязкостью, а ηb - объемная вязкость
(Рис.10). Если b → 0 , то vs → 0 , что соответствует условиям прилипания. Если
b → ∞ , то
∂vb
∂z
→ 0 , что соответствует условию отсутствия трения на границе
жидкость/газ. Это означает полное скольжение из-за пренебрежимо малой
вязкости граничного слоя1. Это эквивалентно упомянутой выше газовой
прослойке. Тот факт, что закон проскальзывания для границы раздела
гидрофобное твердое / вода может быть, в принципе, преобразован в условие
1
На самом деле вязкость воздуха составляет около 2 ⋅10 −4 дин/см2, т.е.
только на два порядка ниже вязкости воды. Таким образом, b / δ ≈ 50 в
стандартных условиях. Это означает, что максимальная длина скольжения,
найденная в тонких капиллярах, может быть обусловлена наличием газовой
прослойки толщиной 1 или 2 молекулярных диаметра!
52
Рис.9.
Проекции скорости жидкости w и v (в произвольных единицах) для
неоднородного скользкого сектора.
53
z
vb
δ
vs
b
Рис.10.
Длина скольжения b , характеризующая величину проскальзывания
вязкой жидкости вблизи гидрофобной поверхности.
54
для пузыря, является весьма логичным. Действительно, другие физические
свойства газового пузыря позволяют говорить о его поверхности как об очень
гидрофобной. Имеется ввиду, прежде всего, очень высокая величина
межфазной энергии для поверхности пузыря ( γ = 72 мДж/м2). Более того,
первое косвенное указание на дальнодействующее притяжение как свойство
гидрофобных тел было сделано Блэйком и Китченером
/16/, наблюдавшими
разрыв пузырей вблизи гидрофобизованной поверхности кварца. Модель (3.3)
всё еще не определяет точно величину длины проскальзывания, поскольку в
настоящее время информация как о слое δ , так и о вязкости ηs недостаточна.
Однако, можно ожидать, что величина
поверхности
может
в
несколько
модифицированной вязкостью δ
раз
b
для твердой гидрофобной
превышать
толщину
слоя
с
и быть, следовательно, очень большой
/119,120/. Одним из аргументов в пользу этого утверждения может быть тот
факт, что уменьшение вякости, скорее всего, обусловлено не только
изменением структуры растворителя, но и возрастанием концентрации газовых
субмикрополостей вблизи гидрофобной поверхности по сравнению с объёмом
раствора. Прямые экспериментальные доказательства, подтверждающие это,
получены методом оптической кавитации /100,91/ и представлены в Главе 2
диссертации. Некоторые наблюдения, сделанные при измерениях силы
гидрофобного притяжения /33,10,18/ (см. Глава 4) и проскальзывания /70/
косвенно подтверждают эту точку зрения. Таким образом, большая величина b
для воды на гидрофобизированной поверхности кварца обусловлена решающей
ролью растворённого газа /120/.
55
3.3. Гидродинамическое
между
искривленными
взаимодействие
гидрофобными
поверхностями.
В этом разделе диссертации исследуется влияние проскальзывания на
гидродинамическое взаимодействие двух гидрофобных искривленных тел.
Рассматриваются два искривленных тела W1 и W2 с ортогональными главными
радиусами кривизны R1− , R1+ и R2− , R2+ (для определенности мы полагаем
R1− < R2− ), соответственно, погруженные в Ньютоновскую жидкость. Индексы –
и + обозначают наименьший и наибольший радиус. Сначала рассмотривается
взаимодействие жестких тел, когда деформация поверхностей под действием
гидродинамических напряжений отсутствует или пренебрежимо мала. Мы
также пренебрегаем шероховатостью поверхностей и допускаем возможность
только точечного контакта. Пусть O1 и O2 - точки тел W1 и W2 для которых
расстояние минимально, а
h - само минимальное расстояние. Последнее мало
по сравнению с наименьшим из радиусов кривизны, т.е. h << R1− .2
Подробный анализ вытекания плёнки между гидрофобными телами дан в
статьях /117,122/.
2
Рид и Морисон /121/ исследовали теоретически медленное движение
двух скользких сфер вдоль оси, соединяющей их центры. Уравнения течения
жидкости были решены в сферических биполярных координатах. Однако,
полученное численно «точное» решение обладало плохой сходимостью, когда
расстояние между сферами становилось меньше их радиуса или длины
скольжения. Таким образом, для получения точного решения для этого случая
необходимо применить методы теории смазки.
56
3.3.1. Жёсткие поверхности.
3.3.1.1.
Проблема
Анализ искривлённой поверхности.
взаимодействия
двух
гладких
искривленных
тел
математически эквивалентна задаче взаимодействия плоскости и поверхности
второго порядка – некоторого эффективного эллиптического параболоида
/122/. Это следует из следующих рассуждений. Прямоугольная система
координат определяется таким образом, что:
- O2 есть начало координат;
- ось Z совпадает с нормалью к W2 и направлена к O1 ;
- плоскость Z = 0 касательна к W2 , а плоскость Z = h касательна к W1 ;
- оси X 2 и Y2 являются главными осями кривизны для W2 , а оси X 1 и Y1
- для W1 .
Вблизи начала координат поверхность W2 может быть локально описана как
Z =−
X 22
Y22
−
+ O( X 24 , Y24 )
+
−
2 R2 2 R2
Аналогично, для поверхности W1 можно записать
Z =h+
X 12
Y12
+
+ O( X 14 , Y14 )
+
−
2 R1 2 R1
Определив новую систему координат как
z=Z+
X 22
Y22
+
,
2 R2+ 2 R2−
имеем
z = O( X 24 , Y24 , X 14 , Y14 ) для W2
X 22
Y22
X 12
Y12
z = h+
+
+
+
+ O( X 24 , Y24 , X 14 , Y14 ) для W1
+
−
+
−
2 R2 2 R2 2 R1 2 R1
57
Выразим теперь X 1 и Y1 через X 2 и Y2 . Предположим, что X 2 O2Y2 может быть
получена правым поворотом X 1O1Y1 на угол ϕ . Тогда
X 1 = X 2 cos ϕ − Y2 sin ϕ
Y1 = X 2 sin ϕ + Y2 cos ϕ
Уравнение
для
эффективной
поверхности
(эквивалентного
эллиптического параболоида) в координатах X 2 O2Y2 примет форму
A11 X 22 + 2 A12 X 2Y2 + A22Y22 + 2 A34 z + A44 = 0 ,
(3.4)
где
A11 =
1
cos 2 ϕ sin 2 ϕ
+
+
2 R2+
2 R1+
2 R1−
A44 = h
⎡ 1
1 ⎤
A12 = cos ϕ sin ϕ ⎢ − −
+ ⎥
⎣ 2 R1 2 R1 ⎦
1
cos 2 ϕ sin 2 ϕ
+
+
A22 =
2 R2−
2 R1−
2 R1+
A34 = −
1
2
Вычислим теперь инварианты уравнения поверхности относительно
преобразования прямоугольных координат, т.е. те функции коэффициентов
уравнения поверхности, которые не изменяются при переходе к новой системе
координат. Инварианты уравнения (3.4) могут быть представлены в форме
I 1 = A11 + A22
A11
A12
A12
A22
A11
A12
0
I 3 = A12
0
A22
0
0
0
I2 =
58
I4 =
A11
A12
A12
A22
0
0
0
0
0
0
0
A34
0
0
A34
A44
Подстановка сюда значений коэффициентов даёт
I1 =
1⎡ 1
1
1
1 ⎤
⎢ − + + + − + +⎥
2 ⎣ R1 R1 R2 R2 ⎦
I2 =
1⎡ 1
1
1
1 ⎞
1
1 ⎞⎤
2 ⎛
2 ⎛
⎢ − + + − + + sin ϕ ⎜⎜ + + + − − ⎟⎟ + cos ϕ ⎜⎜ − + + + − ⎟⎟⎥
4 ⎣ R1 R1 R2 R2
⎝ R2 R1 R2 R1 ⎠
⎝ R2 R1 R2 R1 ⎠⎦
I3 = 0
I4 = −
I2
4
Выведенные выражения позволяют сделать следующие замечания:
1. I 1 не зависит от ориентации поверхностей. Кроме того, в выражении
для I 1 радиусы R1− , R1+ , R2− и R2+ могут не являться главными радиусами
кривизны поверхностей, т.к. сумма средних кривизн исходных поверхностей не
зависит от того, как ориентированы оси (хотя, конечно, Y1 и Y2 всегда
перпендикулярны X 1 и X 2 ).
2. I 2 зависит от ϕ , а радиусы, опредедяющие I 2 , обязательно главные
радиусы кривизны поверхностей.
3. Перестановка строк и столбцов, не меняющая знак определителя I 4 ,
позволяет свести его к виду I 4 = hI 3 − I 2 / 4 . Это выражение, конечно, не
представляет никакого практического интереса. Однако, оно показывает, что
минимальное расстояние между поверхностями может быть выражено через
инварианты уравнения эффективной поверхности.
Теперь
предположим,
что
A12 ≠ 0
и
сделаем
правый
поворот
координат X 2 O2Y2 на угол ϕ 2 (соответственно, координатная система X 1O1Y1
повернётся на угол ϕ1 = ϕ + ϕ 2 ), такой, что в новой системе координат xO2 y
59
перекрёстные члены уравнения поверхности (3.4) равны нулю, т.е. a12 = 0 , а
само уравнение эффективной искривленной поверхности примет вид
H = h + a11 x 2 + a22 y 2 + O( x 4 , y 4 )
(3.5)
Очевидно, что целью этого поворота было совмещение новых осей
координат с плоскостями главных радиусов кривизны эллиптического
параболоида (3.4). В новых координатах
I1 = a11 + a 22
I 2 = a11a 22
I3 = 0
I4 = −
a11 a 22
4
Отсюда следует, что I 1 и I 2 определяют, соответственно, среднюю и
Гауссову кривизну эквивалентной поверхности.
3.3.1.2.
Решение уравнений течения жидкости
Тела двигаются вдоль общей нормали к их поверхностям (т.е. линии,
соединяющей O1 и O2 ) со скоростями v1 и v2 , соответственно. Мы
предполагаем, что возможно только поступательное движение, т.е. что тела не
имеют вращательной степени свободы. Это означает прежде всего отсутствие
вращения вокруг оси z (и также отсутствие «качения» вдоль других осей). Это
условие всегда выполнено в экспериментах по измерению сил, и часто – при
коагуляции частиц.
Течение жидкости в щели между телами должно удовлетворять
уравнениям движения. В нашем случае они существенно упрощаются, т.к.
тангенциальная компонента поля скорости жидкости велика, по сравнению с
нормальной.
В
этих
условиях
уравнения
Навье-Стокса
существенно
упрощаются /123/
η
∂ 2vt
≈ ∇ t p,
∂z 2
(3.6)
60
⎧∂ ∂⎫
; ⎬ . Здесь v x
⎩ ∂x ∂y ⎭
где η - динамическая вязкость, p - давление, vt = {v x ; v y }, ∇ t = ⎨
и v y - проекции скорости жидкости на оси x и y . Отметим, что в первом
приближении давление является функцией только x и y , т.е. p = p( x, y ).
Уравнение неразрывности имеет вид
∂v z
+ ∇ t vt = 0
∂z
(3.7)
Предположим, что b2 = b есть длина скольжения для поверхности W2 , а
b1 = b(k + 1) - для поверхности W1 , где k может меняться от − 1 до ∞ . Тогда
граничные условия примут вид
При z = O( x 4 , y 4 ), v z = 0, vt = b
∂vt
∂z
При z = H , v z − vt ∇ t H = −v, vt = −b(k + 1)
∂vt
,
∂z
где v = v1 − v2 есть скорость тела W1 относительно W2 . Заметим, что k = −1, если
гидрофобное
тело
взаимодействуют
взаимодействует
два
одинаковых
с
k = 0,
гидрофильным;
гидрофобных
тела,
и
k →∞
взаимодействия гидрофобного тела с пузырем.
Решение уравнение (3.6) вместе с граничными условиями даёт
vt =
[
]
1
∇ t p( x, y ) z 2 − zα − bα ,
2η
где
α = α (H ) =
H ( H + 2b(1 + k ))
H + b( 2 + k )
Интегрируя уравнение неразрывности (3.7)
H
H
0
0
v = ∫ ∇ t vt dz = ∇ t ∫ vt dz − ∇ t H [vt ]z = H
и предполагая, что p( x, y ) = p( H ( x, y )) , получаем
если
для
61
v=−
γ dp ⎛ ∂ 2 H ∂ 2 H ⎞
⎜
+ 2 ⎟⎟ ,
∂y ⎠
2η dH ⎜⎝ ∂x 2
где
H3 H2
γ = γ (H ) =
−
α − bHα
3
2
Это уравнение решено для профиля давления p ( x, y ) = p ( H ) :
p=
3ηRh v
⋅ p*,
H2
(3.8)
где безразмерная функция p * есть
(а) k → −1,
1⎛
H ⎡ H ⎛ 4b ⎞⎤ ⎞
p* = ⎜⎜1 + 3 ⋅ 2 ⋅ ⎢1 − ln⎜1 + ⎟⎥ ⎟⎟
4⎝
4b ⎣ 4b ⎝ H ⎠⎦ ⎠
(б) k → ∞,
1 ⎛ H ⎡ H ⎛ 3b ⎞⎤ ⎞
p* = ⎜⎜ 2 ⋅ ⎢1 − ln⎜1 + ⎟⎥ ⎟⎟
4 ⎝ 3b ⎣ 3b ⎝ H ⎠⎦ ⎠
(в) k ≠ −1, k ≠ ∞,
p* = 2 ⋅
с
H
b
⎡ x1
⎡ x2 − x1 ⎛ bx2 ⎞ x3 − x1 ⎛ bx3 ⎞⎤ ⎤
H
ln⎜1 +
+
⎟⎥ ⎥
⎟−
⎢
⎢ 2 ln⎜1 +
H ⎠
H ⎠⎦ ⎦
x32
⎝
⎝
⎣ x 2 x3 b ( x 3 − x 2 ) ⎣ x 2
(
)
(
x1 = 2 + k , x2 = 2 1 + k + 1 + k + k 2 , x3 = 2 1 + k − 1 + k + k 2
)
Выражение (3.8) удовлетворяет дифференциальному уравнению (3.6) и
граничным условиям. Следовательно, оно даёт единственно возможное
распределение давления между эллиптическим параболоидом со средней
кривизной I 1 и плоскостью.
Сила гидродинамического сопротивления, действующая на тело W1
противоположна силе, действующей на W2 . В декартовых координатах
выражение для силы принимает вид
62
∞ ∞
Fh = − ∫
⎛
∫ ⎜⎝ − p + 2η
−∞ −∞
dvz ⎞
⎟dx dy
dz ⎠
(3.9)
Оценивая порядки величин, можно заключить, что в уравнении (3.9)
вклад давления является доминирующим. Переход к цилиндрическим
координатам
x=
r cosθ
,
a11
y=
r sin θ
a22
дает следующие выражения для Якобиана
cosθ
a11
J=
sin θ
a 22
r sin θ
a11
r
r
=
=
r cosθ
a11a22
I2
a22
−
и толщины
H = h + r2
Отсюда,
1
Fh =
I2
2π
∞
0
0
∫ dθ ∫ p( H ) r dr =
π
I2
∞
∫ p( H )dH
h
В результате получаем
Fh =
3πηv
f *,
hI1 I 2
где
(а) k → −1,
1⎛
1
f * = ⎜1 + 3 ⋅ 2 ⋅
4 ⎜⎝
4β
⎡⎛
⎤⎞
1 ⎞
⎜
⎟
(
)
1
+
ln
1
+
4
−
1
β
⎢⎜
⎥ ⎟⎟
⎟
4
β
⎠
⎣⎝
⎦⎠
(б) k → ∞,
1⎛
1
f * = ⎜2⋅
4 ⎜⎝ 3β
⎡⎛
⎤⎞
1 ⎞
⎜
⎟
(
)
1
+
ln
1
+
3
−
1
β
⎢⎜
⎥ ⎟⎟
⎟
3
β
⎠
⎣⎝
⎦⎠
(в) k ≠ −1, k ≠ ∞,
(3.10)
63
f*= −
⎡ ( βx2 + 1)( x2 − x1 )
⎤
( βx3 + 1)( x3 − x1 )
2 x1
2
ln(1 + βx2 ) −
ln(1 + βx3 )⎥
− 2
⎢
2
2
βx2 x3 β ( x3 − x2 ) ⎣
x2
x3
⎦
где β = b / h .
3.3.1.3.
Обсуждение.
Ниже анализируются полученные результаты, которые представляют
собой гидродинамический аналог апроксимации Дерягина /19,21/. Первым
выводом является то, что сопротивление сближению любых тел конечной
кривизны может быть представлено как произведение выражения, полученного
в предположении отсутствия скольжения, или Рейнольдсовской части (в этом
случае выражение (3.10) преобразуется в результат Кокса /124/) и безразмерной
функции f * , представляющей собой поправку на скольжение. Доказано, что
эта функция не зависит от геометрии тел.
3.3.1.3.1.
Поправка на проскальзывание.
Мы отмечаем, что f * зависит только от отношения толщины пленки к длинам
проскальзывания h / b и h /(k + 1)b . Этот результат является очень разумным:
соотношение между разными масштабами длин задачи входит в виде
параметра в окончательное выражение. На Рис.11 изображены кривые для f *
в функции h / b . Эта функция всегда меньше или равна единице. Это означает,
что роль проскальзывания может проявиться только в снижении силы
гидродинамического сопротивления по сравнению со случаем гидрофильных
поверхностей. Можно заключить, что на больших, по сравнению с h и h(k + 1)
расстояниях, т.е. на расстояниях много больше обеих длин скольжения, течение
жидкости является таким же, как и между гидрофильными поверхностями.
Если ширина зазора намного больше только одной из длин проскальзывания,
сопротивление движению будет эквивалентно сопротивлению, испытываемому
гидрофильным телом, двигающимся к поверхности пузыря. Если толщина
прослойки меньше обеих длин скольжения, то поток будет таким же, как для
64
двух недеформируемых пузырей, приближающихся друг к другу. Таким
образом, в общем случае можно ожидать два скачка в поведении функции f *
при утоньшении пленки. Эти скачки являются достаточно резкими (см. Рис.11).
Три предельных случая k → −1, 0, ∞ являются исключением. Поскольку
толщина щели конечна и положительна, существует только один скачок для
k → −1 и k → ∞ . Аналогично, реализуется только один скачок для k → 0 , т.к. в
этом случае длины скольжения равны. Этот результат ведет к выводу
/117,125,126/, что с точки зрения динамики сближения гидрофобность
относительна.
Её
мерой
является
соотношение
между
длинами
проскальзывания и толщиной слоя.
3.3.1.3.2.
Рейнольдсовская часть.
Рейнольдсовская часть полученных выражений является произведением
двух множителей, отражающих различные аспекты взаимодействия двух тел.
Первый сомножитель зависит только от вязкости объемной жидкости и
относительной скорости сближения. Таким образом, он отражает внешние
условия и не зависит ни от характеристик тел, ни от свойств поверхности
твердое/жидкость.
Второй сомножитель зависит только от конфигурационной геометрии,
т.е. от кривизны поверхностей, относительной ориентации главных радиусов
кривизны, а также от расстояния. Важным наблюдением является то, что эта
зависимость может быть выражена только через инварианты уравнения
поверхности второго порядка. Сила гидродинамического сопротивления,
65
Рис.11.
Поправка на скольжение в функции толщины прослойки для различных
k . Пунктирная линия соответствует случаю k = −1 , точки – случаю k = 0 , а
штрих-пунктирная - k → ∞ . Сплошные линии слева направо
k = −0.99, 10, 10 2 , 10 3 , 10 4 , 10 5 и 10 6 .
66
будучи функцией как средней, так и Гауссовой кривизны, сильно зависит как
от угла между главными осями тел, так и от их формы и размера. Анализ
уравнения (3.10) показывает, что максимум Fh отвечает нулевому углу между
главными осями кривизны тел, а минимум Fh наблюдается при угле π / 2 .
Ниже мы приводим выражения для двух особо важных для коллоидной
физики случаев.
Две сферы радиуса R1 и R2 , соответственно. Если
Re =
R1 R2
,
R1 + R2
то для инвариантов унавнения поверхности имеем
I1 =
1
1
, I2 =
,
Re
4 Re2
следовательно,
p=
3ηvRe
p* ,
H2
(3.11)
Fh =
6πηvRe2
f*
h
(3.12)
Эти выражения выведены автором диссертации /117/. Ранние результаты,
полученные для некоторых частных случаев, выведены Хоккингом /127/,
Потаниным и др. /128/ и автором /125,126,129,130/.
Два скрещенных цилиндра ( R2+ = ∞, R1+ = ∞, ϕ =
π
2
). Выражения для
инвариантов уравнения поверхности могут быть записаны как
1⎛ 1
1 ⎞ 1
,
I1 = ⎜⎜ − + − ⎟⎟ =
2 ⎝ R2 R1 ⎠ Rh
I2 =
1 1
1
=
,
− −
4 R2 R1 4 Rg2
где Rh и Rg среднее гармоническое и среднее геометрическое радиусов
цилиндров. Отсюда
p=
3ηvRh
p *,
H2
(3.13)
67
Fh =
6πηvRh Rg
h
(3.14)
f*
Следует отметить, что это выражение легко преобразуется в результат
для более простого случая, полученный Ченом и Хорном /22/.
Таким
образом,
полученные
выражения
позволяют
найти
силу
гидродинамического сопротивления сближению тел любой формы, размеров и
условий на межфазной границе путем простого пересчета силы, полученной
для простого частного случая. Этот результат представляется весьма полезным
для решения гидродинамических задач в физике коллоидов.
3.3.2.
Упругие поверхности.
Строго говоря, все реальные поверхности являются упругими. В
результате все они в той или иной степени деформируются в процессе
сближения. Как будет показано ниже в главе 5, эффект деформации особо
существенен при коагуляции частиц, т.к. этот процесс характеризуется
высокими скоростями. Поэтому, при обсуждении влияния деформации на
вытекание пленки мы ограничимся сферическими поверхностями, что позволит
избежать громоздких выражений. Из предыдущего раздела следует, что
недеформируемая поверхность двух сфер аппроксимируется параболоидом
вращения, следовательно, деформированная поверхность имеет форму
H (r , t ) = h(t ) +
r2
+ w(r , t )
2 Re
(3.15)
где w(r , t ) = w1 (r , t ) + w2 (r , t ) - сумма деформаций поверхностей (Рис.12).
Чтобы определить деформацию мы следуем идеям линейной теории
контактной упругости Герца /131/, а также полее поздним работам
/132,133,134,135/, изучавшим деформацию под действием поверхностных и
гидродинамических сил. Суть теории состоит в том, что приложенная и
распределённая вдоль поверхности нормальная сила вызывает деформацию
последней. Если деформация мала, то интеграл деформации имеет форму
68
w(r , t ) =
4ϑ
π
∞
∫ P( y, t )φ (r , y)dy,
(3.16)
0
где P(r , t ) -давление в слое жидкости. В общем случае это сумма
гидродинамического p(r , t ) и расклинивающего Π (r , t ) давлений. Здесь мы
пренебрегаем
поверхностными
предположение
оправдано
в
силами
и
считаем
случае
больших
P(r , t ) = p(r , t ).
скоростей
Это
сближения
(инерционное столкновение). Параметр ϑ в (3.16) определён как
ϑ=
1 − ν 12 1 − ν 22
+
,
E1
E2
где ν 1, 2 - коэффициент Пуассона, а E1, 2 - модуль Юнга для сфер 1,2. Ядро
функции Грина есть
φ (r , y ) =
⎡ 4ry ⎤
y
K⎢
⎥,
y + r ⎣ (r + y ) 2 ⎦
где K - полный эллиптический интеграл первого рода.
Уравнения (3.6) и (3.7) теперь решаются в цилиндрических координатах
с граничными условиями:
При z = 0, v z = 0, v r = b
∂v r
∂z
∂v
⎛ r ∂w ⎞ ∂H
+
, v r = −b(k + 1) r
⎟=
∂z
⎝ R ∂r ⎠ ∂t
При z = H , v z − v r ⎜
Таким образом, одно из условий изменено по сравнению со случаем жестких
поверхностей. Решение уравнений (3.6) и (3.7) приводит к
⎞⎤
∂H
1 ∂ ⎡⎛ ∂p ⎞⎛ H 3 H 2α
=
−
− bHα ⎟⎟⎥
⎢⎜ r ⎟⎜⎜
∂t
2ηr ∂r ⎣⎝ ∂r ⎠⎝ 3
2
⎠⎦
(3.17)
69
Рис.12.
Деформация двух сталкивающихся сфер. Сплошные линии относятся к
деформированным поверхностям, пунктирные – к жёстким.
70
Уравнение (3.17) является точным и применимо для любой, сколь угодно
большой, деформации. Заметим, что его форма совпадает с уравнением для
жёстких сфер. Однако, теперь
H (r , t ) определена уравнением (3.15) и
включает в себя деформацию. Следствием из этого факта является то, что в
противоположность жёстким поверхностям давление больше не является
функцией профиля поверхности H .
Решение системы уравнений (3.15), (3.16) и (3.17) в общем случае
требует численных методов. Однако, если деформация мала ( w << h ),
уравнения могут быть решены асимптотическими методами. В этом случае, в
первом приближении, деформация может быть рассчитана через профиль
давления в отсутствие деформации (3.8), а скорость относительного движения
поверхностей − ∂H ∂t приближённо равна относительной скорости центра масс
v . Подставляя (3.8) в (3.16), получаем профиль деформации, обусловленной
неравномерно распределённым давлением в щели /136/
3
12ηϑv ⎛ Re ⎞ 2
w(r , t ) =
⎜ ⎟ I ( β ,ζ )
π ⎝ h⎠
(3.18)
где
I ( β ,ζ ) =
∞
∫
φ (ζ ,σ ) ⋅ p * (σ , β )
0
(
2
1+σ
)
2
2
dσ
Здесь использовано следующее масштабирование
ζ =
r
, σ =
Re h
y
b
,β =
h
Re h
В общем случае интеграл (3.18) не может быть вычислен аналитически.
Тем не менее, аналитические выражения могут быть получены в пределе малых
и больших расстояний от оси.
Принимая во внимание, что φ (ζ ,σ ) = π / 2 для ζ = 0 , получаем
(а) k → −1,
71
I ( β ,0) =
(
2π 2
3 + 6β + 2β 2 − 3 1 + 4β
4 ⋅ 16 β 2
)
(б) k → ∞,
I ( β ,0) =
(
2π 2
2 + 3β − 2 1 + 3β
4 ⋅ 18β 2
)
(в) k ≠ −1, k ≠ ∞,
I ( β ,0) =
βx1 ⎞⎟
2π 2 ⎛⎜ ( x1 − x 2 ) βx 2 + 1 ( x1 − x3 ) βx3 + 1 x1 x 2 + x1 x3 − x 2 x3
+
+
+
2 x 2 x3 ⎟⎠
β 2 ⎜⎝ x 22 ( x 2 − x3 )
x32 ( x3 − x 2 )
x 22 x32
Это максимум интеграла, соответствующий максимуму деформации. Для
k → 0 последнее выражение может быть существенно упрощено
I ( β ,0) =
(
)
2π 2
1 + 3β − 2 1 + 6 β .
36 β 2
При β → 0 это выражение переходит в известный результат для гидрофильных
поверхностей I (0,0) = π
2
2
8
/132/.
Для больших расстояний r от оси, имеем σ / ζ << 1 и φ (ζ ,σ ) ≈ π 2 ⋅ σ ζ ,
так что интеграл I ( β , ζ ) асимптотически убывает по закону
(а) k → −1,
I ( β , ∞) ≈
π
8 βζ
⎛ 3
⎞
3⎡
1 ⎤
⎜ − + β + ⎢1 +
⎟
β
ln(
1
+
4
)
⎥
⎜ 2
⎟
β
2
4
⎣
⎦
⎝
⎠
(б) k → ∞,
I ( β , ∞) ≈
π
12 βζ
⎛
⎞
⎡
1 ⎤
⎜ − 1 + ⎢1 +
ln(1 + 3β ) ⎟⎟
⎥
⎜
⎣ 3β ⎦
⎝
⎠
(в) k ≠ −1, k ≠ ∞,
I ( β , ∞) ≈
π
βζ
⎛ ( x1 − x 2 )( βx 2 + 1)
( x3 − x1 )( βx3 + 1)
x1 ⎞
⎜−
⎟
x
x
ln(
1
β
)
ln(
1
β
)
+
−
+
−
2
3
2
2
⎜
⎟
x
x
β
(
)
β
(
)
x
x
x
x
x
x
−
−
2 3 ⎠
2
2
3
3
2
3
⎝
72
Типичный интеграл I ( β , ζ ) и асимптотические результаты приведены на
Рис.13. Интегралы брались численно3. Максимум I ( β , ζ ) возникает при r = 0 .
Он тем больше, чем меньше β и k . Как и прежде, аналитические выражения,
полученные в пределе малых и больших r , могут быть представлены как
произведения выражений, полученных в отсутствии проскальзывания ( I (0,0) и
I (0, ∞) ) и безразмерной поправки на проскальзывание. Рис.14 изображает эти
поправки в функции δ = h / h0 и для разных k . Отметим, что из-за скольжения
поведение интеграла I ( β , ζ ) намного богаче. Причиной этого является то, что
длины скольжения определяют два дополнительных масштаба длины задачи.
Это и ведёт к сложному гидродинамическому поведению тонкого слоя
жидкости в случае, когда его толщина сравнима с длинами проскальзывания.
3
Интеграл φ (r , y) логарифмически сингулярен при y r → 1 :
1
2
φ (r , y ) ≈ ln
8
1− y r
Возникающие, в связи с этим, трудности численного интегрирования
преодолевались стандартным методом устранения сингулярности. Кроме того,
для больших σ интегрирование производилось аналитически с использованием
соответствующих асимптотических выражений для профиля давления и ядра
φ (r , y ) .
73
Рис.13.
Интеграл I ( β , ζ ) , рассчитанный в пределе отсутствия проскальзывания
(сплошная линия) и для скользких частиц (пунктирные линии сверху вниз
β = 10 −2 , 10 −1 , 1, 10 ) для случая k = 0 , I ( β ,0) ( × ) и I ( β , ∞) ( + ).
74
Рис.14.
Поправка на скольжение в интеграле деформациии I (0, ξ ) при ξ → 0 (А)
и ξ → ∞ (В). Пунктирная линия соответствует случаю k = −1 , точки – случаю
k = 0 , а штрих-пунктирная - k → ∞ . Сплошные линии слева направо
k = −0.99, 10, 10 2 , 10 3 , 10 4 , 10 5 и 10 6 .
75
3.4.
1.
Выводы к главе 3
Изучено
явление
проскальзывания
жидкости
относительно
гидрофобной поверхности. Из результатов экспериментов по исследованию
течения
в
тонких
проскальзывания.
гидрофобных
капилляров
рассчитаны
длины
Предложена теоретическая модель, согласно которой
скольжение является кажущимся и есть результат образования тонкого
граничного слоя с пониженной вязкостью. Пристенный слой образуется в
результате расслоения раствора газа в воде, индуцированного конечной
толщиной плёнки между гидрофобными поверхностями и, частично, сдвигом.
2.
Исследовано
гидродинамическое
взаимодействие
гидрофобных
поверхностей. Показано, что сопротивление сближению жёстких гидрофобных
тел конечной кривизны может быть представлено как произведение
выражения, полученного для гидрофильных поверхностей, на безразмерную
поправку на скольжение. Поправка на скольжение не зависит от геометрии тел,
всегда меньше единицы и определяется только отношением ширины зазора к
длинам проскальзывания поверхностей. Выведенные в общем виде выражения
могут быть легко использованы для расчёта сил во всех важных для
коллоидной физики случаях и представляют собой гидродинамический аналог
аппроксимации Дерягина. Кроме того, изучено влияние упругой деформации
на взаимодействие гидрофобных тел. Задача решена численно и, для некоторых
предельных случаев, аналитически.
76
4. ИЗМЕРЕНИЯ СИЛ МЕЖДУ ГИДРОФОБНЫМИ
ПОВЕРХНОСТЯМИ
Четвертая глава посвящена измерениям сил между гидрофобными
поверхностями. В разделе 4.1. приводятся результаты моделирования
измерения сил в SFA, с учётом исследованных в диссертации эффектов. Далее
даётся анализ уравнений движения в AFM (раздел 4.2). В разделе 4.3
приводятся результаты измерения сил с помощью оригинальной установки,
основанной на принципе работы AFM. Результаты обсуждаются в разделе 4.4,
а выводы по главе формулируются в разделе 4.5.
4.1.Моделирование измерения сил в SFA.
4.1.1. Уравнения движения поверхностей.
В диссертации показано, что все способы измерения гидрофобных сил в
SFA являются в той или иной степени динамическими, а поведение системы
контролируется гидродинамикой вытекания плёнки между цилиндрами. Нами
используется
модель измерительной системы, представленная на Рис.1.
Нижняя поверхность крепится на консольной пружине, а верхняя поверхность
закреплена жёстко. Конец пружины, удалённый от цилиндра, может
перемещаться, давая изменения в расстоянии h(t ) . Драйв-функция L(t )
представляет собой расстояние между поверхностями в отсутствие сил между
ними (пружина не отклонена), так что отклонение пружины от положения
равновесия в данный момент времени есть
Δ(t ) = h(t ) − L(t )
Вид драйв-функции определяется используемым методом измерения сил.
Баланс сил. Расстояние между цилиндрами в функции времени
рассчитывается из решения уравнения движения нижней поверхности в
предположении, что инерцией твердых тел и жидкости можно пренебречь.
77
Ниже будет показано, что это допущение выполнено с большим запасом.
Полная
сила,
т.е.
сумма
гидродинамической
и
поверхностной
сил,
уравновешивается упругой силой пружины
Fs + Fh = Fk
(4.1)
Упругая сила пружины пропорциональна её отклонению, умноженному на
постоянную пружины K .
Предполагается, что все присутствующие в системе силы не возмущены
относительным
движением
поверхностей и являются, таким образом,
равновесными. Это допущение справедливо, когда относительная скорость
мала
по
сравнению
с
временами
ответственных за Fs . Следовательно,
релаксации
физических
процессов,
для водных растворов и типичных
скоростей сближения в SFA , оно выполняется с большим запасом. Чтобы
рассчитать динамические кривые, следует, прежде всего, задать силы между
поверхностями.
Гидродинамическая сила. Сопротивление сближению двух скрещенных
цилиндров может быть расчитано по уравнению (3.14), предполагая k = 0 и
η = 10 −2 дин/см2 (объёмная динамическая вязкость воды) /137/. Ниже приводятся
результаты, полученные для длин скольжения b = 0, 10 и 100 нм. С этими
величинами мы уверены, что реальная экспериментальная ситуация не может
выйти за рамки наших предсказаний. В большинстве расчётов используется
стандартная геометрия R1 = R2 = 1 см. Чтобы полностью сформулировать
проблему, добавляется кинематическое уравнение
v(t ) = −
dh
dt
(4.2)
Этот подход справедлив в ситуации, когда деформацией цилиндров можно
пренебречь, а длина скольжения не зависит от скорости сдвига и толщины
плёнки. Поскольку фактор деформации и скорости сдвига может сыграть роль,
78
в Приложении 2 диссертации приводятся выведенные автором выражения для
деформации и скорости сдвига в условиях измерения сил в SFA /136,138,139/.
Поверхностная сила. Рассматривается ситуация, когда действуют только
поверхностные силы притяжения. Эта ситуация наиболее благоприятна для
эксперимента,
т.к.
электростатического
/140,141,142,143,144/.
устраняется
необходимость
отталкивания
Это
и
вычитать
электровязкостный
преимущество
нейтральных
силы
эффект
поверхностей
использовано в большинстве измерений сил /23,30,47/.
В общем случае, поверхностная сила притяжения представляет собой
сумму (дисперсионной) силы ван-дер-Ваальса Fvdw , которая присутствует
всегда, и дополнительного притяжения не ДЛФО природы (гидрофобного
притяжения) Fsh .
В приближении незапаздывающего взаимодействия дисперсионная сила
имеет вид
Fvdw = −
Rg A
6h 2
,
(4.3)
где A = 2 ⋅ 10−20 Дж – константа Гамакера для системы слюда-вода-слюда /20/.
Все найденные экспериментально гидрофобные силы могут быть
смоделированы
как
убывающие
с
расстоянием
по
степенному
или
экспоненциальному закону.
Мы будем предполагать, что степенная сила описывается выражением
Fsh = −
Rg C
h2
,
где C - некоторая константа. Для верхнего предела
(4.4)
C мы используем
величину 10−19 Дж. В этом случае при разрешении SFA (по силе) 10 −7 Н,
гидрофобная сила измеряется уже на расстоянии ≈ 100 нм и в ≈ 1.5 раза больше
силы ван-дер-Ваальса по величине. Таким образом, выбор величин C в
интервале 0 − 10−19 Дж физически обоснован.
Экспоненциальная сила моделируется законом /10/
79
⎛ h⎞
⎛ h⎞
Fsh = − Rg B1 exp⎜⎜ − ⎟⎟ − Rg B2 exp⎜⎜ − ⎟⎟,
⎝ λ1 ⎠
⎝ λ2 ⎠
(4.5)
где B1 и B2 - предэкспоненциальные множители, а λ1 и λ2 -корреляционные
длины. Дальнодействующая
экспонента моделируется
B1 = 0.5 − 2 мН/м и
корреляционными длинами λ1 = 5, 10 и 15 нм, короткодействующая - B2 = 5
мН/м и λ2 = 1 нм.
В общем случае дифференциальное уравнение (4.1) вместе с (3.10), (4.3),
(4.4), (4.5) и (4.8) неразрешимо в квадратурах. С целью нахождения h(t ) это
уравнение решается численно. Детали решения описаны в статьях автора
/138,145 /.
4.1.2. Метод
„захлопывания“ (скачка).
4.1.2.1. Драйв-функция.
В
случае
равновесных
измерений
или
использования
метода
«захлопывания» с целью изменения расстояния конец пружины, удалённый от
цилиндра, двигается в направлении фиксированного цилиндра с помощью
последовательности шагов. Поскольку каждый шаг происходит в течение
промежутка времени, который намного меньше времени установления
равновесия, ситуация моделируется в предположении t s = 0 , т.е. мы считаем,
что драйв-функция представляет собой ступенчатую функцию. Следовательно,
L(t ) = h0 + s + Vd t − Δ 0 ,
(4.6)
где h0 - начальное расстояние, Δ 0 -начальное отклонение пружины, а s < 0 величина шага. В этом выражении также учтена скорость дрейфа Vd
(отрицательная при сближении поверхностей). Дрейф возникает из-за
дифференциального расширения компонентов прибора. В SFA температурные
изменения порядка
10 −2 К перемещают поверхности на 1 нм, поэтому
80
скорость дрейфа порядка 10 −2 нм/сек типична для измерений с помощью SFA
даже в случае улучшенного температурного контроля.
Таким образом,
Fk = K (h − h0 − s − Vd t + Δ 0 ),
(4.7)
где Vd моделируется в интервале от -0.01 до 0.01 нм/с, а s от –1 до –0.1 нм. В
диссертации приводятся результаты, полученные для постоянной пружины 10 5
мН/м. Это типичная величина упругой постоянной для пружин, используемых
в водных системах.
4.1.2.2. Численный алгоритм.
Дифференциальное уравнение (4.1) вместе с уравнениями (3.14), (4.3),
(4.4), (4.5) и (4.7) решается численно с целью определения h(t ) . Сначала
задаётся h0 ,
размер шага в драйв-функции, а также время между шагами.
Перед первым шагом рассчитывается
Δ0
по силам, действующим на
расстоянии h0 , включая возможную гидродинамическую составляющую из-за
дрейфа. Затем в течении некоторого времени
t f (обычно 30-100 сек)
рассчитывается h(t ) с целью смоделировать релаксацию системы в положение
равновесия (или в конечное состояние при t = t f в случае Vd ≠ 0 ).
По
истечении этого промежутка времени мы переводим часы в t = 0 , делаем шаг
s и снова исследуем динамику системы в течение времени t f . Чтобы сделать
каждый новый шаг, мы снова переводим часы в t = 0 и полагаем h0 = h , а
Δ 0 = Δ в конце предыдущего шага. Расчёт останавливается при достижении
контакта поверхностей.
4.1.2.3. Результаты и обсуждение.
На Рис.15 изображены типичные кривые расстояние-время, ожидаемые при
выполнении граничного условия прилипания и в случае силы притяжения,
моделируемой
единичной
(дальнодействующей)
экспонентой.
При
81
расстояниях,
намного
превышающих
точку
статического
скачка
(«захлопывания») и в отсутствие дрейфа все кривые релаксируют в
равновесное положение, после того как сделан шаг в драйв-функции. Хотя все
последовательные шаги имеют одну величину, шаги в h возрастают при
приближении точки неустойчивого равновесия. Кроме того, время релаксации
возрастает с каждым последующим шагом /146/, из-за уменьшения h и
увеличения Δ . Когда h0 приближается к точке неустойчивости, т.е. когда
соответствующее равновесное расстояние h меньше, чем расстояние скачка в
контакт, динамические кривые ведут себя следующим образом. Сначала
поверхности очень медленно двигаются в направлении друг друга. Эта часть
динамической кривой может быть интерпретирована как медленная релаксация
в положение равновесия и легко может быть возмущена или даже перепутана с
термическим дрейфом. После того, как поверхности сблизились на расстояние
статического
скачка,
они
начинают
двигаться
быстрее,
ускоряясь
с
приближением точки контакта. Однако, в типичной экспериментальной
ситуации dh / dt не превысит 100 нм/сек. Это означает, что число Стокса мало,
и пренебрежение инерцией цилиндров оправдано.
Важно отметить то, что
скорость сближения поверхностей при «захлопывании» достаточна мала даже
для того, чтобы фиксироваться обычной видеосистемой. В общем случае, в
зависимости от скорости дрейфа, для сближения поверхностей из последней
устойчивой позиции в положение контакта требуется время от 18 до 130 сек.
Последняя устойчивая позиция зависит от предыстории, т.е. от исходной
позиции, предыдущих шагов, а также от дрейфа. Следовательно, величиной h0
сложно управлять, она может находиться на расстояниях существенно
превышающих точку неустойчивости, а точность измерения расстояния
статического скачка не может быть серьёзно улучшена путём уменьшения
размера шага. Так, для параметров, использованных на Рис.15, разница между
последним положением устойчивого равновесия и точкой неустойчивости
82
Рис.15.
Типичная последовательность кривых время – расстояние, рассчитанная
для k = 10 5 мН/м, t f = 40 сек, s = −1 нм, B1 = 0.5 мН/м, B2 = 0 мН/м. Расстояние
статического скачка представлено пунктирной линией и равно 17.4 нм. Сверху:
b = 0 , Vd = −0.01 (точки), 0 (сплошная линия), 0.01 (штрих-пунктирная линия).
Снизу: Vd = 0 , точки соответствуют b = 100 нм, штрих-пунктирная линия b = 10 нм, а сплошная линия – пределу отсутствия проскальзывания.
83
Рис.16.
Производная расстояния по времени, рассчитанная с теми же
параметрами, что и на Рис.15 (в отсутствие скольжения и дрейфа). Сверху:
сплошные кривые справа налево – динамические кривые, рассчитанные для
последовательности шагов, пунктирная линия – расстояние статического
скачка. Снизу: кривые 1-7 соответствуют шагам в драйв-функции на
расстояниях больше расстояния «захлопывания», кривая 8 иллюстрирует
динамику скачка.
84
составляет 4-6 нм для размера шага –1 нм и 1.5-2 нм для s = −0.1 нм. Это
огромная ошибка, так как обычно утверждается, что в SFA расстояние
контролируется с точностью 0.1 нм.
Скольжение воды относительно твёрдой поверхности ответственно за
уменьшение времени релаксации на больших расстояниях и за более быстрое
сближение поверхностей ниже точки неустойчивости (Рис.16).
Точка
статического
скачка
соответствует
минимуму
силы
гидродинамического сопротивления. Наши расчёты также показывают, что во
всех случаях, т.е. независимо от дрейфа или проскальзывания, расстояние
скачка очень близко к максимуму dh / dt (Рис.16). Следовательно, в этой точке
кривизна
динамической
кривой
меняет
знак.
Это
открывает
новые
возможности в изучении потери устойчивости системой.
Изменение параметров уравнений движения (в первую очередь K и B1 )
ведёт к количественной разнице в результатах, но не меняет выводы об
утоньшении плёнки вблизи точки потери устойчивости. Следует подчеркнуть,
что учёт второй, короткодействующей экспоненты не влияет на динамику
скачка и не может отвечать за резкий скачок в положение контакта, как
предполагалось в ранних работах. Проведенное моделирование доказало, что
резкий скачок может быть следствием сильного (большой по величине
множитель)
дальнодействующего притяжения, служить указанием на
скольжение /118/ или кавитацию /33,100,91/. В последнем случае резкий скачок
– результат капиллярной силы /46, 136 ,147/.
4.1.3.
Динамический метод.
Данные, полученные динамическим методом, представляют собой
кривые h в функции t . Все искомые силы рассчитываются из этих кривых.
Так, например, поверхностная сила может быть получена в предположении, что
гидродинамическое поведение системы адекватно описывается теорией
Рейнольдса, или какой-то другой моделью. С другой стороны, сила
85
гидродинамического сопротивления может быть рассчитана, если известен
закон изменения поверхностных сил с расстоянием.
Для поверхностей, находящихся в покое в начальный момент времени,
можно записать
Fk = K (h − h0 − Vt ),
(4.8)
где h0 - начальное расстояние между цилиндрами, а V - скорость. Разумным
выбором h0 является величина порядка или превышающая возможные
отклонения от теории Рейнольдса из-за проскальзывания. Здесь задаётся
h0 = 200 нм. Скорость движения конца пружины, удалённого от цилиндра,
варьируется в пределах от -1 до -10 нм/с. Минимальная выбранная величина V это скорость, используемая Клаэссоном и Кристенсоном
/23/, которые
пытались минимизировать вклад силы гидродинамического сопротивления с
целью устранить какое-либо влияние отклонений от теории Рейнольдса на
результаты. Максимальная выбранная величина V такова, что мы уверены в
том, что на растояниях больше, чем несколько нм, эластогидродинамической
деформацией можно пренебречь /138/.
Затем по рассчитанной функции h(t ) можно рассчитать кривые силарасстояние для зависящих от времени сил Fh и Fk (см. Приложение 2).
Сопротивление по Рейнольдсу FR затем рассчитывается путем деления Fh на
поправку на скольжение f * . Кажущееся притяжение есть, следовательно,
Fh − FR .
Влияние скорости сближения на отклонения от теории Рейнольдса в
предположении, что единственной поверхностной силой является сила ван-дерВаальса, иллюстрирует Рис.17. Для сравнения, сила ван-дер-Ваальса также
изображена. Из рисунка видно, что экспериментально различимое кажущееся
притяжение проявляется уже на расстояниях ≈15 − 100 нм (в зависимости от
скорости). Последнее аппроксимируется экспоненциальной функцией с двумя
86
длинами корреляции, а также похоже на степенную функцию с показателем
степени – 2. Иными словами, кажущееся притяжение зависит от расстояния
также, как и сила гидрофобного притяжения. Однако, по абсолютной величине
оно не достаточно велико для того, чтобы объяснить различие между теорией
ДЛФО и экспериментом, обычно интерпретируемое в пользу гидрофобного
притяжения /10/.
Ситуация меняется, если в системе присутствует дополнительная сила
притяжения. Это ведёт к значительным отклонениям от теории Рейнольдса
даже
при
очень
малых
скоростях.
Разногласие
между
результатами
динамических и равновесных измерений сил, скорее всего, обусловлено этими
отклонениями
/23/.
Результаты
расчетов
позволяют
заключить,
что
единственным параметром, который может быть использован для разделения
отклонений от теории ДЛФО и теории Рейнольдса, является скорость
сближения. Наличие гидрофобного притяжения (найденного вычитанием
сопротивления по Рейнольдсу и силы ван-дер-Ваальса из общей силы),
зависящего от скорости, будет однозначно указывать на то, что это притяжение
содержит гидродинамическую составлющую. В этом случае реальную и
кажущуюся силы можно разделить количественно. Таким образом, как
гидрофобное притяжения, так и длина проскальзывания могут быть
определены
из
эксперимента
по
измерению
сил.
К
сожалению,
систематические данные такого рода всё ещё отсутствуют. С другой стороны,
отсутствие зависимости от скорости для
гидрофобного притяжения
(найденного вычитанием сопротивления по Рейнольдсу и силы ван-дер-Ваальса
из
полной
силы)
не
обязательно
свидетельствует
об
отсутствии
проскальзывания. Это может быть связано с тем, что в некоторых условиях
вклады проскальзывания и гидрофобной силы не различимы. Такая ситуация
возникает, например, если b = 10 нм. Несмотря на это, и в этом случае влияние
проскальзывание на результаты очень существенно. Проскальзывание может
проявиться, например, в изменении показателя степени гидрофобной силы,
87
убывающей по степенному закону (Рис.18). Оно может также быть причиной
того, что кажущаяся гидрофобная сила убывает по степенному закону или по
закону двух экспонент (Рис.19), в то время как реальная сила гидрофобного
притяжения – экспоненциальная функция. Это, вероятно, является наиболее
поразительным влиянием проскальзывания на динамические измерения сил
/148/.
Поскольку форма динамических кривых в случае гидрофобных
поверхностей всегда зависит как от проскальзывания, так и от силы
притяжения, был также проведён SFA эксперимент на модельной системе
(разбавленный раствор полимера в вязком растворителе), для которой можно
ожидать проскальзывание по аналогичному механизму (расслоение смеси), но в
отсутствие поверхностных сил. Эксперимент и его анализ, описанные в
Приложении 3, подтверждают наличие проскальзывания и, в первом
приближении, хорошее описание динамических кривых уравнениями для Fh ,
выведенными в главе 3 в предположении, что длины скольжения постоянны. В
то же время, получены экспериментальные доказательства того, что в случае
кажущегося
проскальзывания,
вызванного
расслоением
смеси,
длина
скольжения может слабо зависеть от h и скорости сдвига.
4.2. Измерения гидрофобных сил в AFM.
4.2.1. Уравнения движения в AFM.
Измерения сил с помощью AFM всегда являются динамическими, т.к.
они всегда сопровождаются вытеканием плёнки между сближающимися
поверхностями. Хотя несколько недавних публикаций было посвящено
динамическим аспектам взаимодействия, таким как трение /149/, вязкость
тонких плёнок /150,151/ и возможная инерция поверхностей /152/, следующие
типы вопросов оставались без ответа:
88
Рис.17.
(а) Кажущееся притяжение, отнесённое к радиусу кривизны
поверхностей, в функции расстояния, ожидаемое когда между поверхностями
действует только сила ван-дер-Ваальса. Точки относятся к притяжению вандер-Ваальса. Сплошные линии слева направо – расчетные результаты для
V = −1, − 5, − 10 нм/с; (б) те же результаты, представленные в
полулогарифмическом масштабе; (в) те же кривые, но в двойных
логарифмических координатах.
89
Рис.18.
Кажущееся притяжение, отнесённое к радиусу кривизны поверхностей,
в функции расстояния, ожидаемое когда между поверхностями действует сила
гидрофобного притяжения V = −1 нм/с. Точки относятся к притяжению вандер-Ваальса. Сплошные линии слева направо – результаты расчетов с
использованием уравнения (4.4) для C = 0, 10 −13 , 10 −12 эрг.
90
Рис.19.
Кажущееся притяжение, отнесённое к радиусу кривизны поверхностей,
в функции расстояния, ожидаемое когда между поверхностями действует сила
гидрофобного притяжения в полулогарифмическом (А) и логарифмическом (В)
масштабе. Точки относятся к притяжению ван-дер-Ваальса. Сплошные линии
слева направо – результаты расчетов с использованием уравнения (4.5) с
B1 = 1 мН/м, B2 = 0 , λ 1 = 15 нм для V = −1, − 5, − 10 нм/сек. Пунктирные линии
слева направо – кажущееся гидрофобное притяжение.
91
1.
Когда
измерения
сил
в
AFM
могут
рассматриваться
как
квазиравновесные? Иными словами, в каких условиях скорость сближения
поверхностей может считаться достаточно медленной, для того чтобы избежать
существенного динамического вклада в кривые сила-расстояние и полагать, что
упругая сила равна поверхностной силе, действующей на сферу?
2. В каких пределах представления о движении поверхностей в SFA
могут быть перенесены на геометрию AFM?
В диссертационной работе показано, что наиболее существенным
фактором при ответе на эти вопросы является отличие геометрии AFM от
геометрии SFA, состоящее в том, что разным является соотношение размеров
кантилевера и прикреплённого к нему тела /153/. В обоих приборах толщина
жидкой плёнки менее 1 мкм. В случае SFA радиус цилиндров 1-2 см, поэтому
вклад кантилевера в динамические кривые несущественнен. В случае AFM,
прикреплённая сфера, как правило, имеет диаметр 3-10 мкм, а
линейный
размер кантилевера достигает 100-200 мкм. Из этого следует, что минимизация
гидродинамического вклада в кривые, получаемые с помощью AFM, состоит не
столько в уменьшении силы сопротивления, действующей на частицу, сколько
в уменьшении вязкого потока на кантилевер.
4.2.1.1. Теория.
4.2.1.1.1.
Кантилевер
с
вертикальной
силой, приложенной к концу.
Соотношение между крутящим моментом и кривизной кантилевера
описывается выражением /154/
M = EI
d 2z
,
dx 2
где I - момент инерции, а E - модуль Юнга. С другой стороны, крутящий
момент есть
M = F ( L cosα − x) ≈ F ( L − x)
92
Приравнивая эти выражения, можно получить дифференциальное уравнение
для формы кантилевера
F ( L − x) = EI
d 2z
dx 2
Граничные условия выражают тот факт, что позиция и наклон кантилевера на
одном конце зафиксированы
z (0) = 0,
z ' (0) = −α
Это даёт отклонение свободного конца кантилевера
Δ z ( L) = z ( L) + αL = KF ,
где K = 3EI / L3 . Это выражение используется и в SFA, и в AFM, в том случае,
если действует концентрированная сила F .
4.2.1.1.2.
Действие
распределённого
давления.
Наша цель – определить отклонение прямоугольного кантилевера
шириной w и длиной L , вызванное гидродинамическим давлением p (Рис.2).
Для определённости мы считаем ε = w / L ≤ 1 .
Кроме того, используется
допущение, состоящее в том, что поток жидкости может рассматриваться как
суперпозиция потока Стокса на изолированный кантилевер и течения
Рейнольдса для тонкого слоя. В диссертации
изучается только течение
Рейнольдса, т.к. Стоксовский поток не зависит от H .
4.2.1.1.2.1. Уравнения течения жидкости.
Нами решаются уравнения Навье-Стокса и неразрывности с граничными
условиями:
при z = −αx + Δ z : vz = Δ& z , vt = 0
при z = −( Lα + H ) : vz = − H& = −v, vt = 0
где Δ z = Δ z ( x, t ) . Решение имеет вид
∇ t (D 3∇ t p ) = 12ηD& ,
(4.9)
93
где D = D( x, t ) = H + α ( L − x) + Δ z есть щель между пьезо и отклонённым
кантилевером.
Вращающий момент выражается формулой
wL
M ( x) =
∫ ∫ p( x' , y)( x'− x)dydx' ,
(4.10)
0 x
а интегро-дифференциальное уравнение для формы кантилевера можно
записать как
∂ 2 Δ z 3M ( x)
=
KL3
∂x 2
В
общем
случае
система
уравнений
(4.11)
(4.9),
(4.10),
(4.11)
требует
самосогласованного решения. Она, однако, существенно упрощается, если
отклонение мало Δ z << H + α ( L − x) . В этом случае, в первом приближении
отклонение
может
невозмущённого
быть
определено
кантилевера,
а
через
скорость
профиль
давления
относительного
для
движения
приближённо равна скорости пьезо (см. Главу 3). В нашем случае это
оправдано, т.к. отклонение кантилевера, обычно, меньше чем 200 нм, а
минимальное
расстояние
H ≈ 2R ,
где
2 R = 3 − 10
мкм
есть
размер
прикреплённой сферы.
4.2.1.1.2.2. Численное решение
Мы
решаем
уравнение
(4.9),
упрощённое
в
соответствии
с
вышеописанными допущениями:
⎛ ⎛ 1 − ξ ⎞3
⎞
⎟⎟ ∇ t p ⎟ = ζ
∇ t ⎜ ⎜⎜1 +
⎜⎝
⎟
γ ⎠
⎝
⎠
где ζ =
(4.12)
H
x
12ηv
, γ =
, ξ =
3
H
αL
L
Для каждого заданного H
уравнение (4.12) решается
на регулярной
прямоугольной сетке с граничными условиями Дирихле. Дискретизация
производится методом конечных разностей. Решение затем подставляется в
94
уравнение (4.10) для расчёта момента в функции x . Алгоритм численного
интегрирования базируется на методе Гаусса-Лежандра. Рассчитанный момент
вращения используется при решении обыкновенного дифференциального
уравнения второго порядка (4.11). Подстановка x = L даёт искомое отклонение
конца кантилевера. Во всех случаях для интерполяции данных используется
кубический сплайн.
4.2.1.1.2.3. Асимптотическое решение.
В некоторых ситуациях, например, для случая горизонтального
кантилевера, или узкого наклонного кантилевера, возможно аналитическое
решение.
Узкий кантилевер.
Предположение ε << 1 и оценка порядков величин позволяет сделать
дополнительное упрощение ∇t ≈ ∂ / ∂y , что позволяет решить уравнение (4.12)
аналитически. Отклонение конца кантилевера имеет вид
3
3vηL ⎛ w ⎞
Δ z ( L) = −
⎜ ⎟ γ 1*,
8K ⎝ H ⎠
(4.13)
где
γ 1* =
4γ
3
⎡ 3γ
⎛ 1 ⎞⎤
+ 3γ 2 − 3γ 3 ln⎜⎜1 + ⎟⎟⎥
⎢1 −
2
⎝ γ ⎠⎦
⎣
В этом выражении γ 1 * представляет собой поправку на малый угол наклона в
выражении для отклонения узкого горизонтального кантилевера. В недавних
публикациях было предложено /150,155/, что сила, действующая на кантилевер,
может моделироваться степенным законом с показателем − 3 . В диссертации
подтверждено, что гидродинамическая сила не может убывать быстрее, чем по
закону H −3 . Однако, этот предельный случай реализуется только при γ >> 1 .
Поскольку H / L всегда << 1 , это асимптотическое выражение не выполняется
95
даже для очень малых α . В этом состоит одно из существенных отличий от
отклонения кантилевера, вызванного действием концентрированной силы,
которое, в первом приближении, не зависит от α .
Горизонтальный кантилевер.
В этом случае конечное выражение (см. Приложение 4) имеет вид
⎡
3vηL ⎛ w ⎞ ⎢ 27 ε
Δ z ( L) = −
⎜ ⎟ ⎢1 −
8k ⎝ H ⎠ ⎢ π 7
⎢
⎣
3
⎛ πm ⎞ ⎤
− 3εmπ + 2(3ε 2 + m 2π 2 ) tanh⎜
⎟⎥
⎝ 2ε ⎠ ⎥
∑
m7
⎥
m =1, Δm = 2
⎥
⎦
∞
(4.14)
Выражение в квадратных скобках представляет собой поправку на геометрию
(ширину
кантилевера)
наклона
в
выражении
для
отклонения
узкого
горизонтального кантилевера (4.13). Оно стремится к единице при ε → 0 .
4.2.1.2.
Эксперимент.
Экспериментальная установка приведена на Рис.20 и описана в /147,156,157/.
Исследовались беззондовые кантилеверы ( w = 40 мкм, L = 160 мкм, что даёт
ε = 0.25 ). Упругая постоянная каждого кантилевера определялась с помощью
стандартного кантилевера /156/ и составляла K ≈ 36.5 мН/м. Стандартный
кантилевер калибровался методом Клевеланда и др. /158/, основанном на
измерении его резонансной частоты. Кантилевер фиксировался держателем под
углом α ≈ 5 º. Для измерения кривой сила/расстояние кювета двигалась в
направлении кантилевера с помощью пьезотранслятора с амплитудой 15
микрон (Queensgate, DPT-CS, England). Транслятор был оснащён интегральным
сенсором, обеспечивающим измерение позиции с точностью 1 нм.
При
движении пьезо отклонение кантилевера измерялось с помощью техники
оптического
рычага. Луч от
лазерного
диода (1.5
мВатт,
670
нм)
фокуссировался на покрытой золотом обратной стороне кантилевера. После
отражения зеркалом, позиция лазерного луча измерялась с помощью
96
специального устройства (United Detectors, UK, активная зона 30 × 5 мм2).
Динамические кривые измерялись за 50 сек – 0.2 мсек, что соответствовало
скоростям 0.6-150 мкм/сек. Положение твёрдой поверхности и отклонение
кантилевера
фиксировалось
двоичным
осциллографом
(эффективное
разрешение 12 бит). Для пересчёта позиции из Вольт в нм использовалась
контактная часть кривой, для которой изменение высоты равно изменению
отклонения кантилевера.
4.2.1.3. Результаты и обсуждение.
На Рис.21 приводится серия динамических кривых, полученных при
различных скоростях (от 7.53 до 122.59 мкм/сек) и результаты расчета по
уравнению
(4.12).
Для
выбора
точки
нулевого
предположение, что на больших расстояниях
эксперимент
совпадают.
Эксперимент
отклонения
делалось
(10-15 мкм) теория и
подтверждает,
что
отклонение
кантилевера, вызванное распределённым гидродинамическим давлением не
только сравнимо, но и может превышать отклонение, вызванное силами,
действующими на сферу. Отклонение возрастает с увеличением скорости v и
уменьшается с ростом H , что находится в согласии с теоретическими
предсказаниями.
Расчёты
достаточно
хорошо
описывают
отклонение
кантилевера на больших расстояниях, но дают большую ошибку для тонкой
щели. Причинами этого могут быть:
- Неучёт изменения потока, вызванного держателем. Математически это
выражается в том, что граничное условие p = 0 при x = 0 может быть
нарушено;
- Чувствительность асимптотики к очень малым изменениям угла
наклона α . Конструкция нашей установки позволяла контролировать угол
только с точностью ± 1 º. Если угол был бы в действительности равен 6º, то
совпадение теории и эксперимента было бы намного лучше. Учитывая тот
факт, что при измерении сил в AFM кантилевер не может приблизиться к пьезо
97
на расстояние меньше, чем диаметр прикреплённой сферы, причём последний,
обычно, от 3 до 10 мкм, можно заключить, что теория адекватно описывает
эксперимент, если размер сфер подобран правильно.
Например, из Рис.21
следует, что для скорости –7.5 мкм/сек диаметр частицы должен быть не
меньше, чем 3 мкм, а для скорости –123 мкм/сек сфера должна быть размером
больше, чем 7 мкм.
Мы предложили модель для простейшего случая прямоугольного
кантилевера, хотя при измерениях сил чаще используются кантилеверы Vобразной формы. Как известно, единственной комбинацией размерности силы
может быть ηvD , где D - характеристический размер /81/. Таким образом, для
тонкой
щели
сила
может
F ≈ ηvD × функция ( D / H , D'/ H ) , где
Следовательно, отклонение
быть
всегда
выражена
формулой
D' - другой характеристический размер.
V-образного кантилевера
также описывается
выведенными выше выражениями, где L - длина кантилевера, а w - некоторая
эффективная ширина.
4.2.2.
Прямые
измерения
гидрофобных
сил.
Целью этой части работы является исследование взаимодействия
гидрофобизованных поверхностей в AFM. Отличием подхода, развитого в
диссертации, является (а) новый метод контроля краевого угла микрочастиц;
(б) контроль и сравнение первого, второго и т.д. взаимодействия поверхностей.
Это стало возможным благодаря использованию описанной выше установки,
основанной на принципе AFM. Кроме того, удалось приготовить и исследовать
как гомогенные и гладкие, так и шероховатые гидрофобные поверхности.
98
Лазерный диод
Сенсор позиции
Усилитель
Шаговый
DPT контроллер
мотор
Двоичный пьезотранслятор
AFM
кантилевер
Частица
Пузырь
Рис.20.
Схема установки для измерения сил и краевых углов микрочастиц
99
Рис.21.
Динамические кривые, полученные для различных скоростей
пьезотранслятора (сплошные линии). Сверху вниз скорость пьезо
v ≈ −122.59, − 76.93, − 30.82, − 15.30 и −7.53 мкм/сек. Пунктирные линии – результаты
расчётов для тех же скоростей.
100
4.2.2.1. Материалы и методы.
4.2.2.1.1.
В
качестве
Подготовка поверхностей и воды.
исследованных
поверхностей
использовались
силанизированный кварц и полистирол.
Кварцевые сферы (Bangs Inc., Carmel, USA ) радиусом 2.35 микрон были
приклеены к беззондовому кантилеверу (Digital Instruments, California, Vshaped, длина 100-200 мкм, толщина 0.6 мкм) с помощью эпоксидного клея
(Epikote
1004,
кантилевера
Shell).
Упругие
постоянные
каждого
индивидуального
определялись стандартным методом /158/ и были, обычно, в
пределах 0.02 − 0.3 Н/м. Частицы подвергались обработке в О2 плазме в течение
100 сек и затем гидрофобизовались путём помещения в пары
гексаметилдисилазана
(Aldrich,
Germany,
99.9%,
1,1,1,3,3,3-
структурная
формула
(CH3)3Si-NH-Si(CH3)3) на 5 часов при температуре 70ºС. Гидрофобная пластина
гитовилась путём аналогичной силанизации окисленной кремниевой пластины.
Полистироловые сферы (Bangs Inc., Carmel, USA) радиусом 4.38 микрон
промывались водой для отмывки ПАВов, добавляемых для стабилизации
дисперсии при синтезе. Высушенные в вакууме частицы приплавлялись к
беззондовому кантилеверу (Рис.22). Для этого кантилевер выдерживался при
температуре 120º в течение 200-240 сек. Пластины из полистирола готовились
из гранул полистирола (состав 99% М=373000 и 1% М=2000). Гранулы
помещались на нагретую до 150ºС кремниевую пластину, размягчались и
прессовались
ручным
прессом
с
тефлоновым
поршнем
(нагрузка
приблизительно 0.5 кг в течение нескольких секунд). Таким образом,
приготовленная пластина была такой же гладкой, как и кремниевая.
Вода
включающей
очищалась
ионный
с
помощью
обмен
и
коммерческой
обработку
системы
активированным
Milli-Q,
углём.
101
Деионизированная
вода
имела
проводимость
меньше
0.1 × 10−6 Сим/м.
Тефлоновая кювета очищалась в горячей концентрированной азотной кислоте в
течение нескольких минут и затем тщательно промывалась чистой водой.
4.2.2.1.2.
Эксперимент.
Силанизированная кварцевая пластина помещалась на дно тефлоновой
кюветы (Рис.20). Затем частица помещалась на несколько микрон выше
поверхности с помощью микрометрического винта, перемещаемого шаговым
мотором (вверх-вниз), и двух микрометрических винтов, позволяющих менять
латеральную позицию. Это осуществлялось при оптическом контроле
микросферы (увеличение 120). Динамические кривые измерялись за 90 сек. Это
вело к скоростям сближения порядка 0.3 мкм/сек. В соответствии с нашими
оценками,
можно
гидродинамики
в
предположить,
силовые
что
кривые
при
можно
такой
скорости
пренебречь.
вкладом
Эксперименты
проводились при комнатной температуре без буфера, следовательно, при рН
около 6.
4.2.2.1.3.
Интерпретация
динамических
кривых.
Результатом измерений являются кривые отклонение кантилевера Δ в
функции позиции пьезотранслятора z . Чтобы получить кривые сила в функции
расстояния, Δ и z пересчитываются в силу и h по формулам F = KΔ и
h = Δ+z.
Мы,
кроме
того,
полагаем,
что
F = Fs .
102
Рис.22.
Сфера из полистирола, приваренная к свободному концу кантилевера
AFM.
103
Фаза 1
R
α
Θ
r
Фаза 2
D
Рис.23.
Сферическая частица на границе раздела фаз.
104
4.2.2.1.4.
Для
Измерения краевого угла.
определения краевого угла используется метод, основанный на
определении равновесного положения частицы (сила равна нулю) на кривой
сила-расстояние /156,159/. Для определения отступающего угла пузырь
(диаметром 1-1.5 мм) помещался с помощью пипетки на силанизированную
кварцевую пластину. Затем кювета двигалась в направлении частицы,
прикреплённой к кантилеверу. Когда частица касается пузыря, формируется
трёхфазный контакт (TCP) и капиллярная сила втягивает частицу в пузырь.
После образования
TCP доминирующей силой является капиллярная, т.к.
размер частицы намного меньше капиллярной длины /160,161/
F = 2πRγ ⋅ sin α ⋅ sin(θ r − α ) ,
где θ r - отступающий краевой угол, а параметр α характеризует позицию
частицы на межфазной границе (Рис.23). После образования TCP кювета
продолжает двигаться, и, в некоторый момент времени, сила, действующая на
частицу, равна нулю, что происходит при α = θ . Эта равновесная позиция
нулевой силы характеризуется глубиной погружения Db (Рис.24). Последняя
может быть непосредственно получена из кривой сила-позиция, поскольку
представляет собой разницу между точкой скачка и позицией нулевой силы
(Рис.25). Затем отступающий краевой угол рассчитывался по уравнению
cosθ r =
R − Db
R
Наступающий краевой угол θ a определяется в аналогичном эксперименте с
каплей воды в воздухе
cosθ a =
Dd − R
,
R
105
Измерения для плоской поверхности проводились путём наблюдения
лежачей капли с помощью коммерческой установки (Kruess, G10, Hamburg,
Germany). Оцененная ошибка составила ≈ 1 º.
4.2.2.2. Обсуждение результатов.
Топография
поверхности
гидрофобизованных
кварцевых
сфер
и
пластины с помощью зонда AFM показала, что 1,1,1,3,3,3-гексаметилдисилазан
образует гладкий (с помощью AFM мы можем оценить латеральную
гетерогенность только с точностью ≅ 5 нм) монослой. Шероховатость на
участке 1 мкм2 была меньше 0.5 нм как для сфер, так и для пластины. Сферы из
полистирола имели шероховатость 10-20 нм, а пластина была такой же гладкой,
как и кварцевая (Рис.26).
Отступающие краевые углы, полученные для разных кварцевых частиц,
были хорошо воспроизводимы и, от частицы к частице, давали разброс только
± 1 º. Средний отступающий краевой угол составлял θ r =81º, что очень близко к
величине отступающего угла θ r =83º, найденного для на приготовленной
аналогичным образом кварцевой пластине. Наступающий краевой угол давал
больший разброс ( ± 4 º от частицы к частице). Средний наступающий краевой
угол составлял θ a =97º. Это находится в согласии с величиной наступающего
угла на плоской поверхности θ a =95º. Таким образом, обнаружен гистерезиз
краевого угла, что свидетельствует о химической гетерогенности поверхностей.
Частицы из полистирола давали больший разброс краевого угла, который
отличался на ±4 º от сферы к сфере. Средний отступающий угол составил 67.3º
(для плоской поверхности - 70º), а наступающий – 84.5º (для плоской
поверхности - 90º). Таким образом, все используемые поверхности могли
считаться гидрофобными.
106
Водный раствор
пузырь
α=Θ
α
Db
Рис.24.
Иллюстрация схемы измерений. Пузырь двигается в сторону частицы.
До установления TPC и в отсутствии дальнодействующих сил кантилевер не
отклонён (слева). После образования TPC пузырь деформируется, и на частицу
действует капиллярная сила, что ведёт к отклонению кантилевера (в центре).
Если пузырь продолжает двигаться в направлении кантилевера, то в некоторый
момент времени сила, действующая на кантилевер, равна нулю (справа). В этот
момент пузырь снова деформирован незначительно. Разница между
положением пьезо перед формированием TCP и в позиции нулевой силы есть
параметр Db , используемый для расчёта отступающего краевого угла.
107
F/R [mN/m]
Db
Force/Radius [mN/m]
40
0.0
-0.5
-1.0
-1.5
1000 500
20
0
-500 -1000 -1500
Position [nm]
0
-20
-40
8000 6000 4000 2000
0
-2000 -4000
Position [nm]
Рис.25.
Сила в функции позиции z для системы сфера из полистирола- газовый
пузырь в 10−3 М KCl. Вставка показывает часть кривой вблизи скачка в
увеличенном масштабе.
108
На Рис.27 приведены типичные силовые кривые, полученные для первого и
последующих взаимодействий гидрофобных частицы и плоскости. Все кривые
сила-расстояние имели следующие особенности. На больших расстояниях
наблюдалось отталкивание, убывающее по экспоненциальному закону. Этот
участок кривых не анализировался количественно в случае чистой воды, т.к.
Дебаевская длина в воде очень велика и, вообще говоря, не определена. В
случае растворов электролитов корреляционная длина всегда совпадала с
Дебаевской длиной (в пределах ошибки эксперимента). Все кривые имели
максимум силы отталкивания. Корреляции между величиной максимума и
расстоянием не найдено. Из этого максимума поверхности
скачком
переходили в положение контакта. Расстояние, на котором наблюдался этот
скачок, существенно менялось от частицы к частице (от 5 до 275 нм для кварца
и от 10 до 400 нм для полистирола), хотя поверхности готовились одинаковым
способом и имели один и тот же краевой угол, который контролировался после
измерения силы (Рис.28). Рис.28 также демонстрирует, что расстояние
«захлопывания» является наименьшим для первой кривой (обычно 5-12 нм для
кварца и 10-20 нм для полистирола), возрастает после удаления поверхностей
из положения первого контакта и становится примерно постоянным для
повторяемых измерений сил (после нескольких сближений) для данной пары
взаимодействующих поверхностей. Таким образом, в диссертации показано,
что чтобы корректно проанализировать кривую сила-расстояние, полученную в
AFM, нужно делать различие между первым и последующими сближениями
поверхностей.
Следует
отметить,
что
даже
для
первого
сближения
«захлопывание» не является результатом действия силы ван-дер-Ваальса,
которая для K = 0.3
Н/м дала бы скачок на расстоянии меньше 3 нм. Все
предыдущие
эксперименты
AFM
измеряли
позднее
(послеконтактное)
взаимодействие и, следовательно, почти наверняка, они завышали расстояние
скачка в контакт по сравнению с первым взаимодействием. Особенностью
109
Сфера из
полистирола
Гидрофобная
кварцевая сфера
Рис.26.
AFM (Nanoscope 3, Digital Instr., Калифорния, США) имидж поверхности
частицы из полистирола (одно деление по вертикали – 20 нм) и
силанизированной кварцевой сферы (деление по вертикали – 15 нм). Имиджи
получены контактным способом с использованием стандартного зондового
кантилевера из нитрида кремния при частоте сканирования 5-10 Герц.
110
силовых кривых для полистирола было то, что на малых расстояниях
наблюдалось короткодействующее отталкивание, указывающее на то, что
поверхности сжимаемы.
Таким
образом,
проведенный
эксперимент
поставил
следующие
вопросы: в чём причина наблюдаемых явлений и почему, в частности, в
противоположность эксперименту в SFA /33,10/, контакт ведёт к увеличению
силы притяжения?
Как обсуждалось в Главе 1, кавитация между гидрофобными поверхностями
выгодна термодинамически, но только если расстояние очень мало (~1 нм).
Размер
контактной
полости
зависит
от
размера
взаимодействующих
поверхностей. Следовательно, контакт поверхностей в SFA и AFM должен
вести к разным типам полостей, а именно, микроскопическим или видимым и
субмикроскопическим.
В
SFA
эксперименте
образуются
полости
микроскопического размера, что было обнаружено в измерениях показателя
преломления и с помощью оптического микроскопа. Сильное аттракционное
взаимодействие измерялось в отсутствие этих видимых полостей. Более того,
оно было сильнее, чем в их присутствии /10/. (Что касается субмикрополостей,
то латеральной чувствительности SFA к измерению показателя преломления
недостаточно для того, чтобы обнаружить такую структуру /47/). Контакт
поверхностей
в
AFM
должен
вести
к
образованию
полостей
субмикроскопического размера. Таким образом, возрастание расстояния
аттракционного скачка после первого контакта поверхностей косвенно
подтверждает предложенную в Главе 2 гипотезу о том, что гидрофобное
притяжение, не являясь результатом образования
газовых микрополостей,
может быть следствием образования субмикрополостей.
Похожие силовые кривые (позднее взаимодействие) и изменение расстояния
«захлопывания» от частицы к частице могут быть следствием захваченных
газовых пузырей /162/, стабилизированных химической неоднородностью /39/
или шероховатостью /46/. Полученные результаты подтверждают, что
111
субмикрополости,
образованные
после
первого
взаимодействия,
не
растворяются немедленно как предсказывают простые теории /96,163/, а
остаются стабильными в течение циклов сближения/сепарации поверхностей.
Из нашего эксперимента следует, что субмикронные пузыри, ответственные за
дальнодействующее притяжение, не образуются на поверхности в момент её
первого погружения в воду /18,162/. Как уже отмечалось, образование пузырей,
ведущее к увеличению расстояния скачка в контакт, обусловлено контактом
поверхностей (только однажды расстояние аттракционного скачка превышало
100 нм для первого взаимодействия). Следует подчеркнуть, что кварцевые
поверхности были гладкими (в масштабе больше 5 нм латерально и в масштабе
больше 0.5 нм по нормали к поверхности). Следовательно, все относящиеся к
дальнодействующим силам наблюдения – результат только гидрофобизации.
Они не осложнены
шероховатостью. Последняя не может играть роль в
масштабе субмикрополостей, который сравним с расстоянием «захлопывания».
Именно по этой причине расстояние первого скачка в случае шероховатого
полистирола больше, чем для гладкого кварца, и также совпадает с масштабом
неоднородностей.
Чтобы исследовать возможные причины «устойчивости»
субмикрополостей (и доказать, что химическая неоднородность не влияет на
результаты) некоторые из экспериментов были повторены после того, как
поверхности выдерживались на расстоянии порядка 100 мкм в течение 2 часов.
Последующий эксперимент показал, что первое взаимодействие опять
характеризуется наименьшим расстоянием аттракционного скачка, равным
наблюдаемому в предыдущем эксперименте (Рис.28). Это означает, что
субмикрополости, образованные в первом эксперименте, растворились, будучи
в контакте с объёмом воды. Это также подтверждает, что субмикрополости не
образованы при внесении поверхности в воду и не «стабилизированы»
химической неоднородностью. Таким образом, можно заключить, что важным
фактором
устойчивости
является
гидрофобными поверхностями.
нахождение
в
тонком
слое
между
112
0,2
0,1
F/R, m N/m
0
1
-0,1
2
-0,2
3
4
-0,3
-0,4
-0,5
0
50
100
h, nm
Рис.27.
Типичные кривые сила-расстояние, полученные для первого (1), второго
(2), пятого (3) и десятого (4) взаимодействий.
113
s1
300
s1'
s2
250
s3
s4
h j, nm
200
s5
150
100
50
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
N
Рис.28.
Граница неустойчивости h j для последовательности взаимодействий N .
Кривые s1, s4 и s5 дают типичное расстояние скачка в контакт. Подобное
поведение наблюдалось во многих экспериментах. Кривые s2 и s3
иллюстрируют особые случаи, где расстояние первого скачка превышало 100
нм, и где дальнодействующая сила притяжения не была найдена. Кривая s1‘
получена со сферой, использованной в опыте s1, после того как поверхности
выдерживались в контакте с объёмом воды в течение нескольких часов.
114
Из Рис.28 также видно, что расстояние скачка в положение контакта
иногда остаётся постоянным при повторяющихся измерениях сил и равно
расстоянию первого скачка. Иными словами, в этом случае наблюдается
короткодействующее притяжение между поверхностями. Это отличается от
того, что в последнее время наблюдается экспериментаторами, но согласуется с
ранними сообщениями о гидрофобных силах /164/.
Если
скачок
в
контакт
связан
с
наличием
коалесцирующих
субмикронных пузырей, то размер и количество этих пузырей уменьшится при
уменьшении
газосодержания
в
растворе.
Действительно,
расстояние
«захлопывания» существенно уменьшается при дегазации растворов (при этом
величина максимума несколько увеличивается, а корреляционная длина не
меняется).
Тем не менее, в случае полистирола следует, видимо, считать, что
«захлопывание» есть не только результат действия капиллярной силы (из-за
коалесценции
субмикропузырей),
но
и
деформации
поверхностей.
В
Приложении 5 описывается примитивная модель, описывающая влияние
пластической деформации на форму линии контакта. Модель предсказывает
скачок в контакт и вогнутую форму линии контакта. Однако, отсутствие
экспериментальной зависимости формы линии контакта от скорости сближения
приводят к выводу, что в случае полистирола деформация является упругой.
Важным
следствием
из
полученных
результатов
является
неприменимость аппроксимации Дерягина, которая относит силу, делённую на
радиус, к
свободной энергии взаимодействия плоских поверхностей.
Субмикропузырьковый механизм гидрофобного притяжения означает, что
дальнодействующее притяжение обусловлено коалесценцией находящихся на
разных поверхностях субмикропузырей (образованных при контакте), ведущей
к образованию капиллярного мостика. Иными словами, притяжение вызвано
действием не поверхностной, а капиллярной силы. Таким образом, радиус
115
взаимодействующих
поверхностей
не
служит
мерой
масштабирования
величины силы, а определяет только число пузырей, находящихся на
достаточно близком расстоянии, для того, чтобы коалесцировать. В результате,
сила не зависит существенно от радиуса кривизны поверхностей, поскольку
только один или два субмикропузыря с каждой поверхности вовлечены во
взаимодействие.
Другим следствием является то, что то, что обычно называется
гидрофобным притяжением, возникает благодаря нескольким различным
механизмам. Так, в случае полистирола, мы имели дело со скачком в контакт
частично из-за деформации, важен вклад проскальзывания и т.д.
4.3.
Выводы к главе 4.
1. В главе показано, что все существующие методики измерения сил
притяжения являются динамическими. Сформулированы и решены уравнения
движения поверхностей, соответствующие различным методикам измерения
сил в аппарате для измерения поверхностных сил и атомно-силовом
микроскопе. Доказано, что метод «захлопывания» и динамический метод
измерения сил с помощью
SFA ведут к завышению силы гидрофобного
притяжения. Первый – из-за того, что последняя устойчивая позиция
поверхностей
находится
на
расстоянии,
существенно
превышающим
расстояние скачка в контакт. Второй – из-за неучёта проскальзывания.
Сформулированы принципы метода динамического скачка. Предложен способ
количественного разделения вкладов поверхностной и гидродинамической сил
при использовании как стандартного динамического метода, так и метода
динамики скачка.
2. Показано, что при измерениях сил с помощью AFM существенный
вклад в динамические кривые вносится вязким потоком на кантилевер.
Сформулированы условия проведения эксперимента, при которых можно
116
минимизировать этот эффект. В этих условиях проведены измерения
гидрофобных сил, особенностью которых было использование как гомогенных
и гладких, так и шероховатых поверхностей, контроль краевого угла и
контроль каждого взаимодействия поверхностей. Доказано, что основной вклад
в
дальнодействующее
гидрофобное
притяжение
вносит
коалесценция
поверхностных долгоживущих субмикронных пузырей, что приводит к
неприменимости аппроксимации Дерягина. В общем случае гидрофобная сила
– сумма нескольких эффектов.
117
5. КОАГУЛЯЦИЯ ЧАСТИЦ.
В этой главе описывается динамическая коагуляция гидрофобных частиц
как приложение полученных результатов.
5.1. Введение и формулировка задачи.
Многие промышленные технологии основаны на дестабилизации водных
коллоидных суспензий, основанной на гидрофобизации частиц. Напротив,
гидрофилизация является известным способом повыщения устойчивости
дисперсных систем.
Потеря устойчивости водных коллоидных суспензий гидрофобных
частиц обычно описывается путём добавления силы гидрофобного притяжения
к стандартной модели ДЛФО. При этом предполагают, что частицы
сближаются так медленно, что их кинетической энергией можно пренебречь по
сравнению
с
потенциальной
энергией
взаимодействия.
Следовательно,
критерием коагуляции является исчезновение максимума энергии парного
взаимодействия частиц. Коагуляция частиц, как правило, возникает в условиях
интенсивного перемешивания, а относительные скорости сближения могут
достигать 10-100 см/сек /132,165/.
В этом случае зависимостью условий
коагуляции от динамики сближения пренебречь нельзя. Более того, Потанин и
др. /166,128/ показали, что в некоторых условиях критерий коагуляции
определяется в основном условиями вытекания жидкой пленки из щели между
частицами. Очевидно, что в этой ситуации быстрое слипание гидрофобных
частиц может быть объяснено только влиянием проскальзывания.
Попытки описать коагуляцию скользких частиц (в режиме смазки)
делались в серии статей Хоккинга /127/, Барнокки и Дэвиса /167/, Потанина и
др. /128,168/, автора диссертации /125,126,165,169,170,171/ и других авторов.
Ниже мы суммируем их аргументы. В общем случае, относительное движение
твердых сфер описывается кинематическим уравнением
118
m
dv
= − F (t )
dt
(5.1)
где m = m1 m2 /(m1 + m2 ) - приведенная масса, а F - равнодействующая сил
между двумя поверхностями. Это уравнение должно использоваться вместе с
кинематическим уравнением (4.2). Начальными условиями для системы
уравнений (5.1) и (4.2) являются v = v0 и h = h0 при t = 0 .
Мы будем делать различие между двумя режимами коагуляции,
реализуемыми при разных значениях числа Стокса
2 ρRe v0
mv0
,
=
2
9μ
6πμRe
(5.2)
которое мерой инерции частиц относительно вязких сил. Здесь
ρ -
St =
плотность частиц.
В первом режиме инерция частиц пренебрежимо мала ( St << 1 ). Это
означает, что левая часть уравнения (5.1) может быть опущена, а относительное
движение частиц определяется простым балансом силы сопротивления и
некоторых дополнительных сил. Такая ситуация, например, характерна для
коагуляции под действием гравитации и/или Архимедовой силы /127/.
Поверхностные силы могут также внести вклад, поскольку скорость сближения
мала. В диссертации этот случай не рассматривается, т.к. анализ подобен
приведенному в предыдущем разделе, где мы рассматривали динамические
измерения сил.
Основное внимание уделяется второму режиму, где инерция частиц
играет роль ( St ≥ 1 ), несмотря на то, что инерцией жидкости в тонкой щели
можно прененебречь. Оценки порядка величин показывают, что при
столкновении
частиц,
обладающих
значительной
инерцией,
вкладом
гравитации в равнодействующую силу можно пренебречь /132/.
Постановка задачи в нашем случае эквивалентна вопросу: “Какой
должна быть начальная относительная скорость частиц (или число Стокса),
чтобы вызвать их коагуляцию?” Возможны несколько алгоритмов расчета
119
условий коагуляции. В диссертации используется только один из них,
предложенный
впервые
Потаниным
и
др.
/166,128/.
Несмотря
на
относительную простоту, этот подход позволяет ответить на много вопросов,
связанных со столкновениями частиц /165,169,170/. Основная идея подхода
состоит в следующем. Предполагается, что поверхностные силы начинают
играть роль только после того как частицы остановились /125,128,132/. Поэтому
можно решить уравнение (5.1) и, следовательно, найти v(h) в предположении
F = Fh , т.е. пренебрегая поверхностными силами. Затем, зная форму функции
v(h) можно найти такое h1 , что v(h1 ) = 0. Условием коагуляции тогда следует
считать
h1 << h2 ,
(5.3)
где h2 - некоторое характеристическое расстояние между частицами,
определяемое
поверхностными
силами.
Если
потенциальная
энергия
взаимодействия частиц имеет максимум, то h2 совпадает с его координатой.
Если же максимума нет, тогда h2 - расстояние порядка радиуса действия
поверхностных сил притяжения. Очевидно, что гидрофобизация уменьшает h1
и увеличивает h2 . Поэтому для гидрофобных частиц неравенство (5.3) будет
выполнено для меньших чисел Стокса /171,172,120/.
5.2. Решение.
5.2.1.
Жёсткие сферы.
5.2.1.1.
Скорость столкновения.
Уравнение (5.1) может быть переписано в форме
⎛ v
St ⋅ d ⎜⎜
⎝ v0
и решено аналитически для нахождения
⎞ f*
⎟⎟ =
dh
h
⎠
(5.4)
120
v
v*
= 1− ,
v0
St
(5.5)
где v0 - безразмерная функция h / b :
(а) k → −1,
⎡ ⎛
1
⎢1 − ⎜⎜ 2 +
4β
⎣ ⎝
v* = ln
3
β 3 4β 0 + 1
+ ln
+
β 0 4 4β + 1 4 ⋅ 4β
3
4 ⋅ 4β0
⎡ ⎛
⎤
1 ⎞
⎟⎟ ln(1 + 4 β 0 )⎥
⎢1 − ⎜⎜ 2 +
4β 0 ⎠
⎢⎣ ⎝
⎥⎦
⎤
⎞
⎟⎟ ln(1 + 4 β )⎥ −
⎠
⎦
(б) k → ∞,
v* =
1 ⎛⎜ β (3β 0 + 1)
1
ln
−
4 ⎜⎝ β 0 (3β + 1) 3β 0
⎡ ⎛
1
⎢1 − ⎜⎜ 2 +
3β 0
⎣ ⎝
⎤ 1
⎞
⎟⎟ ln(1 + 3β 0 )⎥ +
⎠
⎦ 3β
⎡ ⎛
⎤⎞
1 ⎞
⎟⎟ ln(1 + 3β )⎥ ⎟
⎢1 − ⎜⎜ 2 +
⎟
3β ⎠
⎣ ⎝
⎦⎠
(в) k ≠ −1, k ≠ ∞,
⎡ 1 + 2 βx2 ⎤
β ( x2 − x1 )
x1 ⎡ 1
1⎤
ln(1 + βx2 ) ⎢1 +
−
⎢ − ⎥ + ln
⎥+
β 0 ( x2 − x3 )
β 2 x22 ⎦
x2 x3 ⎣ β β 0 ⎦
⎣
⎡ 1 + 2 βx3 ⎤
( x3 − x1 )
ln(1 + βx3 ) ⎢1 +
⎥+
β 2 x32 ⎦
( x2 − x3 )
⎣
⎡ 1 + 2 β 0 x3 ⎤
⎡ 1 + 2 β 0 x2 ⎤ ( x3 − x1 )
( x2 − x1 )
β
ln(1 + β 0 x2 ) ⎢1 +
ln(
1
x
)
−
+
⎥
⎥
0 3 ⎢1 +
( x2 − x3 )
β 0 2 x22 ⎦ ( x2 − x3 )
β 0 2 x32 ⎦
⎣
⎣
v* =
Здесь мы ввели β 0 = b / h0 = β ⋅ δ с δ = h / h0 . Для k → 0
v* = ln
β (6 β 0 + 1)
1
−
β 0 (6 β + 1) 6 β 0
⎡ ⎛
1
⎢1 − ⎜⎜ 2 +
6β 0
⎣ ⎝
⎤ 1
⎞
⎟⎟ ln(1 + 6 β 0 )⎥ +
⎠
⎦ 6β
⎡ ⎛
1
⎢1 − ⎜⎜ 2 +
6β
⎣ ⎝
⎤
⎞
⎟⎟ ln(1 + 6 β )⎥,
⎠
⎦
что для β 0 , β → 0 даёт
v* = − ln δ
Это известный результат в отсутствие проскальзывания: скорость линейно
убывает с ln δ и равна нулю при δ = exp(− St ). В этой точке диссипативные силы
вязкой жидкости останавливают инерционное движение сфер.
121
5.2.1.2.
Критерий коагуляции.
Если β 0 меньше некоторой критической величины, которая зависит от
β 0 и k , частицы останавливаются на расстоянии, которое может быть
вычислено из решения уравнения (5.4) для δ в предположении v = 0 (или
v* = St ). Предположив, что h и v равны нулю, можно определить критическое
число Стокса St * ( β 0 , k ) , соответствующее критической величине β 0 , которая
позволяет частицам коснуться друг друга:
(а) k → −1,
⎛ ln δ ⎞
St* = ⎜ −
→∞
⎟
⎝ 4 ⎠ δ →0
(б) k → ∞,
St* =
1 ⎛⎜ ⎛
1
ln⎜⎜1 +
4 ⎜⎝ ⎝ 3β 0
⎞
1 ⎡ ⎛
1
⎟⎟ −
⎢1 − ⎜⎜ 2 +
3β 0
⎠ 3β 0 ⎣ ⎝
⎤⎞
⎞
⎟⎟ ln(1 + 3β 0 )⎥ ⎟
⎟
⎠
⎦⎠
(в) k ≠ −1, k ≠ ∞,
St* =
x 2 − x1 ⎛
1
ln⎜⎜1 +
x 2 − x3 ⎝ β 0 x 2
⎞ x3 − x1 ⎛
1 ⎞
⎟⎟ −
⎟⎟ −
ln⎜⎜1 +
⎠ x 2 − x3 ⎝ β 0 x3 ⎠
( x − x1 ) ln(1 + β 0 x 2 ) ⎛
1 ⎡ x1
1
⎜⎜ 2 +
− 2
⎢
β 0 ⎣ x 2 x3
β 0 x2
x 2 ( x 2 − x3 )
⎝
⎞ ( x3 − x1 ) ln(1 + β 0 x3 ) ⎛
1 ⎞⎤
⎟⎟ +
⎜⎜ 2 +
⎟⎥
β 0 x3 ⎟⎠⎦
x3 ( x 2 − x3 )
⎠
⎝
Скорость частиц в функции расстояния между ними иллюстрирует
Рис.29, а критические числа Стокса изображены на Рис.30. Если условия
таковы, что мы находимся под кривыми, то контакт сфер отсутствует. Вязкие
силы полностью диссипируют кинетическую энергию частиц. Заметим, что
если хотя бы одна поверхность гидрофильна ( β 0 = 0 или k → −1 ), то контакт
жестких частиц требует St* → ∞ . Также заметим, что при малых β 0 величина
St * является линейно убывающей функцией β 0 :
1⎛3
4⎝2
⎞
⎠
если k → ∞, то St* = ⎜ − ln 3 − ln β 0 ⎟
122
если k ≠ ∞, то St* =
3 ( x1 − x 2 ) ln x 2 − ( x1 − x3 ) ln x3
+
− ln β 0
2
x 2 − x3
Для St и β 0 , находящимися над критическими кривыми, жесткие
сферы обладают достаточной инерцией для соприкосновения. Эти условия на
число Стокса могут рассматриваться как сильный критерий коагуляции, т.к. в
действительности коагуляция произойдёт, если v = 0 при h = h1 << h2 , а не при
h = 0 , т.е при меньших числах Стокса. С учётом этого может быть
сформулирован слабый критерий коагуляции, который из-за громоздкости
здесь не приводится. В качестве примера дадим только выражение для
наиболее распространённого случая k = 0 :
St* = ln
⎤ δ ⎡ ⎛
⎤
δ1 (6 β 0 + 1)
δ ⎞
1 ⎡ ⎛
1 ⎞
⎟⎟ ln(1 + 6 β 0 )⎥ + 1 ⎢1 − ⎜⎜ 2 + 1 ⎟⎟ ln(1 + 6 β 0 / δ 1 )⎥,
−
⎢1 − ⎜⎜ 2 +
6 β 0 + δ1
6 β 0 ⎣⎢ ⎝
6β0 ⎠
6β 0 ⎠
⎦⎥ 6 β 0 ⎣⎢ ⎝
⎦⎥
где параметр δ 1 = h1 / h0 . Выражение упрощается для двух предельных
случаев 6 β 0 >> 1 и
6 β 0 << 1 . В первом режиме получаем St* = ln δ 1 , что
совпадает с выражением для гидрофильных частиц. Во втором режиме St* = 0 ,
т.е. сопротивление сближению отсутствует.
Ниже будет показано, что это не так для упругих сфер.
5.2.2.
Упругие поверхности.
Роль проскальзывания в деформации ясна уже из анализа (3.16). С
одной стороны, проскальзывание снижает p * , что ведёт к уменьшению
I ( β , ζ ) . С другой – ведет к увеличению скорости сближения. Эти факторы
действуют в противоположных направлениях.
Условия, при которых отношение деформации к толщине пленки мало,
могут быть найдены путём подстановки уравнения (5.5) в выражение для
деформации (3.16) и последующим делением на h :
123
⎛ v⎞
w(0)
= εδ −5 / 2 ⎜⎜ ⎟⎟ I ( β ,0)
h
⎝ v0 ⎠
(5.6)
Здесь введён безразмерный параметр
12θμv 0 R 3 / 2
ε=
πh05 / 2
Этот параметр характеризует деформируемость частиц и должен быть
малым, для того чтобы деформация была мала. Оценки порядка величин
показывают, что для большинства систем типичные значения ε лежат в
интервале 10 −7 − 10 −5 . Деформация и коагуляция упругих частиц определяется,
главным образом, асимптотическим поведением скорости частиц в пределе
малых расстояний.
Докритические St и β 0 . В этом случае интеграл I ( β ,0) конечен, и
частицы ведут себя следующим образом. Частицы начинают сближаться. С
уменьшением расстояния между частицами, давление в зазоре возрастает.
Давление вызывает деформацию (уплощение) частиц. Однако, оно также
тормозит частицы, что, в свою очередь, ведёт к понижению давления. В
результате, в некоторый момент времени деформация достигает максимума и
затем уменьшается. Например, в отсутствие проскальзывания максимум w(0) / h
соответствует
⎛2
⎝5
⎞
⎠
δ = exp⎜ − St ⎟
и равен
w(0) επ 2 2
⎛ 5St ⎞
=
exp⎜
− 1⎟
20St
h
⎝ 2
⎠
124
Рис.29.
Скорости частиц в функции расстояния (между жёсткими сферами) для
St = 5 в отсутствие скольжения (сплошные линии) и для скользких частиц
(пунктирные линии снизу вверх β 0 = 10−3 ,10−2 ,10−1 ,1,10 ): k = −1 (А), 0 (В), 20 (С),
∞ (D).
125
Рис.30.
Критические числа Стокса в функции β 0 . Сверху вниз
k → −0.99, 0,10,102 , ∞ . Сплошные линии соответствуют точным результатам,
пунктирные линии – асимтотическим решениям для малых β 0 .
126
На Рис.31 кривые относительной деформации представлены в функции
δ . Мы видим, что величина максимума деформации тем больше, чем больше
β0 и k .
Например, в пределе отсутствия проскальзывания условие малости
деформации выполнено если
ε <<
⎛ 5St ⎞
exp⎜1 −
⎟
2 ⎠
2
⎝
20 St
π2
Для скользких частиц условие на ε сильнее. Толщина слоя жидкости,
соответствующая максимуму деформации тем меньше, чем больше β 0 и k .
Однако слой жидкости всегда предотвращает непосредственный контакт тел.
Критические St и β 0 . В этом случае скорость столкновения жёстких
сфер стремится к нулю по закону
v
≈ −δ ln δ ,
v0
а интеграл деформации по закону
I ( β ,0) ≈ δ
Отсюда следует, что хотя w(0) → 0 при h → 0 , функция w(0) / h
расходится как
w(0)
≈ −δ −1 / 2 ln δ
h
Сверхкритические St и β 0 характеризуются конечной ненулевой
скоростью частиц при h → 0 . В результате, при h → 0 , деформация w(0) → ∞ , а
относительная деформация расходится как
w(0)
≈ δ −3 / 2
h
Это означает, что деформация препятствует контакту тел. Этот вывод
аналогичен результату известному для деформируемых капель и пузырей
/173,174/.
127
Рис.31.
Относительная максимальная ( r = 0 ) деформация частиц для St = 5 и
ε = 10−6 в отсутствие скольжения (сплошные линии) и для скользких частиц
(пунктирные линии снизу вверх β 0 = 10−4 ,10−3 ,10−2 ,10−1 ): k = −1 (А), 0 (В), 20 (С),
∞ (D).
128
Таким образом, следует подчёркнуть, что как для критических, так и для
закритических St и
β 0 физический контакт (и последующий отскок) не
возможен в рамках приближения малости деформации.
5.3. Выводы к главе 5
1. Изучена коагуляция гидрофобных частиц в динамических условиях.
Критерий коагуляции сформулирован в виде условия на число Стокса.
Повышенная агрегация гидрофобных частиц объяснена тем, что критерий
коагуляции выполнен при меньших числах Стокса из-за проскальзывания
и силы гидрофобного притяжения.
2. Показано, что для жёстких частиц возможна как коагуляция,
контролируемая проскальзыванием, так и коагуляция, контролируемая
силой притяжения. Доказано, что для упругих частиц коагуляция всегда
связана с действием поверхностных сил притяжения, поскольку в их
отсутствии деформация предотвратит контакт частиц.
129
ЗАКЛЮЧЕНИЕ.
В
диссертации
исследовано
равновесное
и
гидродинамическое
взаимодействия гидрофобных поверхностей. Основные результаты работы
состоят в следующем:
1.
Особые свойства жидкости в тонком слое между гидрофобными
поверхностями
растворённого
предложено
газа.
связать
Методом
доказательства того, что
с
процессами
оптической
нуклеации
кавитации
получены
такой слой характеризуется повышенной
концентрацией газовых субмикрополостей.
2.
Изучено
явление
гидрофобной
проскальзывания
поверхности.
Из
жидкости
результатов
относительно
экспериментов
по
исследованию течения в тонких гидрофобных капиллярах рассчитаны
длины проскальзывания. Предложена теоретическая модель, согласно
которой скольжение является кажущимся и есть результат образования
тонкого граничного слоя с пониженной вязкостью. Показано, что
пристенный слой образуется в результате расслоения раствора газа в
воде,
индуцированного
конечной
толщиной
плёнки
между
гидрофобными поверхностями и сдвигом.
3.
Исследовано
гидродинамическое
взаимодействие
гидрофобных
поверхностей. Показано, что сопротивление сближению жёстких
гидрофобных тел конечной кривизны может быть представлено как
произведение
выражения,
полученного
для
гидрофильных
поверхностей, на безразмерную поправку на скольжение. Поправка на
скольжение не зависит от геометрии тел, всегда меньше единицы и
определяется
только
отношением
ширины
зазора
к
длинам
проскальзывания поверхностей. Выведенные в общем виде выражения
могут быть легко использованы для расчёта сил во всех важных для
коллоидной физики случаях и представляют собой гидродинамический
130
аналог аппроксимации Дерягина. Кроме того, изучено влияние упругой
деформации на взаимодействие гидрофобных тел. Задача решена
численно и, для некоторых предельных случаев, аналитически.
4.
Проведено численное моделирование и прямые измерения сил в SFA.
Сформулированы и решены уравнения движения поверхностей в SFA,
соответствующие различным способам измерения сил притяжения.
Доказано, что стандартный метод „захлопывания“ не позволяет точно
определить расстояние потери устойчивости и ведёт к завышению
радиуса действия силы притяжения. Показано, что наличие быстрого
„захлопывания“, а не медленного вытекания плёнки, как предсказывает
компьютерный
эксперимент,
может
означать
либо
наличие
проскальзывания, либо кавитацию. Сформулированы принципы нового
метода „динамического скачка“, позволяющего не только измерять
силы притяжения на расстояниях меньше точки статического
„захлопывания“, но и судить о природе вызвавших его сил, а также о
динамических эффектах в тонком слое. Доказано, что динамический
метод измерения гидрофобных сил также ведёт к завышению их
величины (из-за гидрофобного проскальзывания). Установлено, что
проскальзывание проявляется в искажении реальной функциональной
зависимости гидрофобного притяжения от расстояния.
Проведены
прямые измерения сил на модельной системе, где ожидается
проскальзывание
по
механизму
аналогичному
гидрофобному
(расслоение смеси), но в отсутствие сил притяжения, подтвердившие
адекватность модели.
5.
Исследованы уравнения движения поверхностей в AFM. Показано, что
принципиальное отличие от баланса сил в SFA состоит в том, что
линейный размер кантилевера AFM существенно больше размера
прикреплённой к нему поверхности, что вызывает отклонение
кантилевера
под
действием
развиваемого
гидродинамического
131
давления. Выведено и решено уравнение для отклонения кантилевера
вязким
потоком,
Решение
вызванным
проверено
Сформулированы
и
движущимся
пьезотранслятором.
подтверждено
условия
экспериментально.
эксперимента,
позволяющего
минимизировать этот эффект при измерениях поверхностных и
гидродинамических сил в AFM.
6.
Проведены
прямые
измерения
гидрофобных
сил
с
помощью
оригинальной установки, основанной на принципе действия AFM, с
использованием как гомогенных и гладких, так и шероховатых
поверхностей. Установлено, что дальнодействующее притяжение –
результат совместного действия нескольких эффектов, основным из
которых
является
коалесценция
поверхностных
долгоживущих
пузырей субмикронного размера. Доказано, что в случае гладких
поверхностей такие пузыри образуются при контакте гидрофобных
тел, а в случае шероховатых поверхностей
пузыри могут быть
захвачены при первом погружении в воду.
7.
Изучена коагуляция гидрофобных частиц в динамических условиях.
Критерий коагуляции сформулирован в виде условия на число Стокса.
Повышенная агрегация гидрофобных частиц объяснена тем, что
критерий коагуляции выполнен при меньших числах Стокса из-за
проскальзывания и силы гидрофобного притяжения. Показано, что для
жёстких
частиц
проскальзыванием,
возможна
так
и
как
коагуляция,
коагуляция,
контролируемая
контролируемая
силой
притяжения. Доказано, что для упругих частиц коагуляция всегда
связана с действием поверхностных сил притяжения, поскольку в их
отсутствии деформация предотвратит контакт частиц.
132
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ.
1
Tanford C., The hydrophobic effect. - NY: Wiley. - 1980.
2
Franks F., In: Water: A comprehensive treatise. edited by F. Franks
(Plenum, NY, 1975), V. 4, p. 1-94.
3
Evans D.F., Ninham B.W. Molecular forces in self organisation of
amphiphiles. //J. Phys. Chem. -1986. -V.90. -N.2. -P.226-234.
4
Pangali C., Rao M., Berne B.J. A Monte Carlo simulation of the
hydrophobic interaction. //J. Chem. Phys. -1979. -V.71. -P.2975-2981.
5
Chan D.Y.C., Mitchell D.J., Ninham B.W., Pailthorpe B.A., In: Water:
A comprehensive tretise. edited by F. Franks (Plenum, NY, 1979), V. 6, p. 239-278.
6
Pratt L.R., Chandler D. Theory of the hydrophobic effect. //J. Chem.
Phys. -1977. -V.67. -P.3683-3704.
7
Kolomeisky A.B., Widom B. Model of the hydrophobic interaction.
//Faraday Discuss. -1999. -V.112. -P.81-89.
8
Besseling N.A.M., Lyklema J. Molecular thermodynamics of
hydrophobic hydration. //J. Phys. Chem. B -1997. -V.101. -P.7604-7611.
9
Besseling N.A.M., Lyklema J. Reply to comment on "Molecular
thermodynamics of hydrophobic hydration". //J. Phys. Chem. B -1998. -V.102. N.44. -P.8943-8944.
10
Christenson H.K., In: Modern approach to wettability: Theory and
Application. edited by M. E. Schrader and G. Loeb (Plenum, NY, 1992), p. 29-51.
11
Lee C.Y., McCammon J.A., Rossky P.J. The structure of liquid water at
an extended hydrophobic surface. //J. Chem. Phys. -1984. -V.80. -N.9. -P.4448-4455.
12
Fowkes F.M. //Ind. Eng. Chem. -1964. -V.56. -N.12. -P.40.
133
13
Yushchenko V.S., Yaminsky V.V., Shchukin E.D. Interaction between
particles in a nonwetting liquid. //J. Colloid Interface Sci. -1983. -V.96. -N.2. -P.307314.
14
Yaminsky V.V., Yushchenko V.S., Amelina E.A., Shchukin E.D.
Cavity formation due to a contact between particles in a nonwetting liquid. //J.
Colloid Interface Sci. -1983. -V.96. -N.2. -P.301-306.
15
Laskowski J., Kitchener J.A. The hydrophilic-hydrophobic transition
on silica. //J. Colloid Interface Sci. -1969. -V.29. -N.4. -P.670-679.
16
Blake T.D., Kitchener J.A. Stability of aqueous films on hydrophobic
methylated silica. //J. Chem. Soc. Faraday Trans. 1 -1972. -V.86. -P.1435-1442.
17
Rabinovich Y.I., Derjaguin B.V. Interaction of hydrophobized
filaments in aqueous electrolyte solutions. //Colloids Surfaces -1988. -V.30. -P.243251.
18
Parker J.L., Claesson P.M., Attard P. Bubbles, cavities, and the long-
ranged attraction between hydrophobic surfaces. //J. Phys. Chem. -1994. -V.98. N.34. -P.8468-8480.
19
Derjaguin B. Untersuchungen ueber die Reibung und Adhaesion, IV.
Theorie des Anhaftens kleiner Teilchen. //Kolloid-Zeitschrift -1934. -V.69. -N.2. P.155-164.
20
Israelachvili J.N., Adams G.E. Measurements of forces between two
mica surfaces in aqueous electrolyte solutions in the range 0-100 nm. //J. Chem. Soc.
Faraday Trans. 1 -1978. -V.74. -P.975-1001.
21
White L.R. On the Deryaguin approximation for the interaction of
macrobodies. //J. Colloid Interface Sci. -1983. -V.95. -N.1. -P.286-288.
22
Chan D.Y.C., Horn R.G. The drainage of thin liquid films between
solid surfaces. //J. Chem. Phys. -1985. -V.83. -P.5311-5324.
134
23
Claesson P., Christenson H.K. Very long range attractive forces
between uncharged hydrocarbon and fluorocarbon surfaces in water. //J. Phys. Chem.
-1988. -V.92. -P.1650-1655.
24
Binnig G., Quate C.F., Gerber C. Atomic force microscope. //Phys.
Rev. Lett. -1986. -V.56. -P.930-933.
25
Ducker W.A., Senden T.J., Pashley R.M. Direct Measurement of
Colloidal Forces Using an Atomic Force Microscope. //Nature -1991. -V.353. P.239-241.
26
Butt H.-J. Measuring electrostatic, van der Waals, and hydration forces
in electrolyte solutions with an atomic force microscope. //Biophys. J. -1991. -V.60. P.1438-1444.
27
Israelachvili J., Pashley R. The hydrophobic interaction is long range,
decaying exponentially with distance. //Nature -1982. -V.300. -P.341-342.
28
Pashley R.M., Israelachvili J.N. A comparison of surface forces and
interfacial properties of mica in purified surfactant solutions. //Colloids Surfaces 1981. -V.2. -P.169-187.
29
Israelashvili J.N., Pashley R.M. Measurements of the hydrophobic
interaction between two hydrophobic surfaces in aqueous electrolyte solution. //J.
Colloid Interface Sci. -1984. -V.98. -N.2. -P.500-514.
30
Pashley R.M., McGuiggan P.M., Ninham B.W., Evans D.F. Attractive
forces between uncharged hydrophobic surfaces: direct measurements in aqueous
solution. //Science -1985. -V.229. -P.1088-1089.
31
Tsao Y., Yang S.X., Evans D.F. Interaction between hydrophobic
surfaces. Dependence on temperature and alkyl chain length. //Langmuir -1991. -V.7.
-N.12. -P.3154-3159.
135
32
Christenson H.K., Claesson P.M., Berg J., Herder P.C. Forces between
fluorocarbon surfactant monolayers: Salt effect on the hydrophobic interaction. //J.
Phys. Chem. -1989. -V.93. -P.1472-1478.
33
Christenson H.K., Claesson P.M. Cavitation and the interaction
between macroscopic hydrophobic surfaces. //Science -1988. -V.239. -P.390-392.
34
Kurihara K., Kunitake T. Submicron-range attraction between
hydrophobic surfaces of monolayer-modified mica in water. //J. Am. Chem. Soc. 1992. -V.114. -N.27. -P.10927-10933.
35
Christenson H.K., Claesson P.M., Parker J.L. Hydrophobic attraction:
A reexamination of electrolyte effects. //J. Phys. Chem. -1992. -V.96. -N.16. P.6725-6728.
36
Parker J.L., Cho D.L., Claesson P.M. Plasma modification of mica:
Forces between fluorocarbon surfaces in water and a nonpolar liquid. //J. Phys.
Chem. -1989. -V.93. -N.16. -P.6121-6125.
37
Rabinovich Y.I., Yoon R.H. Use of atomic force microscope for the
measurements of hydrophobic forces. //Colloids Surfaces A -1994. -V.93. -P.263273.
38
Yoon R.H., Flinn D.H., Rabinovich Y.I. Hydrophobic interactions
between dissimilar surfaces. //J. Colloid Interface Sci. -1997. -V.185. -P.363-370.
39
Mahnke J., Stearnes J., Hayes R.A., Fornasiero D., Ralston J. The
influence of dissolved gas on the interactions between surfaces of different
hydrphobicity in aqueous media. 1. Measurements of interaction forces. //Phys.
Chem. Chem. Phys. -1999. -V.1. -P.2793-2798.
40
Craig V.S.J., Ninham B.W., Pashley R.M. Study of the long-range
hydrophobic attraction in concentrated salt solutions and its implications for
electrostatic model. //Langmuir -1998. -V.14. -N.12. -P.3326-3332.
136
41
Karaman M.E., Meagher L., Pashley R.M. Surface chemsitry of
emulsion polymerization. //Langmuir -1993. -V.9. -P.1220-1227.
42
Meagher L., Craig V.S.J. Effect of dissolved gas and salt on the
hydrophobic force between polypropylene surfaces. //Langmuir -1994. -V.10. P.2736-2742.
43
Ederth T., Claesson P., Liedberg B. Self-assembled monolayers of
alkanethiolates on thin gold films as substrates for surface force measurements.
Long-range hydrophobic interactions and electrostatic double-layer interactions.
//Langmuir -1998. -V.14. -N.17. -P.4782-4789.
44
Toikka G., Hayes R.H., Ralston J. Surface forces between zinc sulfide
and silica in aqueous electrolyte. //Colloids Surfaces A -1998. -V.141. -N.1. -P.3-8.
45
Claesson P.M., Kjellander R., Stenius P., Christenson H.K. Direct
measurement of temperature-dependent interactions between non-ionic surfactant
layers. //J. Chem. Soc. Faraday Trans. 1 -1986. -V.82. -P.2735-2746.
46
Considine R.F., Hayes R.A., Horn R.G. Forces measured between latex
spheres in aqueous electrolyte: Non-DLVO behavior and sensitivity to dissolved gas.
//Langmuir -1999. -V.15. -N.5. -P.1657-1659.
47
Kekicheff P., Spalla O. Long-range electrostatic attraction between
similar, charge-neutral walls. //Phys. Rev. Lett. -1995. -V.75. -N.9. -P.1851.
48
Christenson H.K., Fang J., Ninham B.W., Parker J.L. //J. Phys. Chem. -
1990. -V.94. -P.8004-8006.
49
Christenson H.K., Parker J.L., Yaminsky V.V. Comment on
"Interactions between hydrophobic surfaces. Dependence on temperature and alkyl
chain length". //Langmuir -1992. -V.8. -P.2080.
50
Eriksson J.C., Ljunggren C., Claesson P. //J. Chem. Soc. Faraday
Trans. 2 -1989. -V.85. -P.163.
137
51
Derjaguin B.V., Churaev N.V. Structure of water in thin layers.
//Langmuir -1987. -V.3. -P.607-612.
52
Forsman J., Woodward C.E., Joensson B. Repulsive hydration forces
and attractive hydrophobic forces is a unified picture. //J. Colloid Interface Sci. 1997. -V.195. -P.264-266.
53
Attard P. Long-range attraction between hydrophobic surfaces. //J.
Phys. Chem. -1989. -V.93. -N.17. -P.6441-6444.
54
Podgornik R. Electrostatic correlation forces between surfaces with
surface specific ionic interactions. //J. Chem. Phys. -1989. -V.91. -N.9. -P.58405849.
55
Podgornik R., Parsegian V.A. An electrostatic-surface stability
interpretation of the "hydrophobic" force inferred to occur between mica plates in
solutions of soluble surfactants. //Chem. Phys. -1991. -V.154. -P.477-483.
56
Tsao Y.H., Evans D.F., Wennerstroem H. Long-range attraction
between a hydrophobic surface and a polar surface is stronger than that between two
hydrophobic surfaces. //Langmuir -1993. -V.9. -N.3. -P.779-785.
57
Tsao Y.H., Evans D.F., Wennerstroem H. Long-range attractive force
between hydrophobic surfaces observed by atomic force microscopy. //Science 1993. -V.262. -P.547-550.
58
Berard D.R., Attard P., Patey G.N. Cavitation of a Lennard-Jones fluid
between hard walls, and the possible relevance to the attraction measured between
hydrophobic surfaces. //J. Chem. Phys. -1993. -V.98. -N.9. -P.7236.
59
Forsman J., Joensson B., Woodwand C.E. Computer simulations of
water between hydrophobic surfaces: The hydrophobic force. //J. Phys. Chem. -1996.
-V.100. -N.36. -P.15005-15010.
138
60
Helmholtz H., Piotrowski v. Ueber Reibung tropfbarer Fluessigkeiten.
//Sitzungsberichte der Kaiserlichen Akademie der Wissenschaften -1860. -V.40. P.607-658.
61
Brodman
C.
Untersuchungen
ueber
reibungskoeffizienten
au
fuessgkeiten, Goettingen, 1981.
62
Wetham W.C.D. On the alleged slipping at the boundary of a liquid in
motion. //Proc. R. Soc. London -1890. -V.48. -P.225-230.
63
Ladenburg R. Ueber der Einfluss von Waenden auf die Bewewung
einer Kugel in einer reibenden Fluessigkeit. //Annalen der Physik vierte Folge -1907.
-V.23. -P.447-458.
64
Bingham E.C., Fluidity and Plasticity. - NY: McGraw-Hill. - 1922.
65
Traube J., Whang S.H. Ueber Reibungskonstante und Wandschicht.
//Z. Physikal. Chem. A -1928. -V.138. -P.102-122.
66
Weber L.J., Neugebauer H. Theoretische Betrachtungen ueber das
Traube-Whangsche Phaenomen. //Z. Physikal. Chem. A -1928. -V.138. -P.161-168.
67
Tausz J., Koeroesy F.V. Ueber Reibungkonstante und Wandschicht.
//Z. Physikal. Chem. A -1929. -V.140. -P.263-272.
68
Ronceray M.P. Recherches sur l'ecoulement dans les tubes capillaires.
//Annales de Chimie et de Physique -1911. -V.22. -P.107-125.
69
Schnell E. Slippage of water over nonwettable surfaces. //J. Appl. Phys.
-1956. -V.27. -P.1149-1152.
70
Churaev N.V., Sobolev V.D., Somov A.N. Slippage of liquids over
lyophobic surfaces. //J. Colloid Interface Sci. -1984. -V.97. -P.574-581.
71
Kiseleva O.A., Sobolev V.D., Vinogradova O.I., Churaev N.V.
Slippage of CTAB solutions flowing trough thin quartz capillaries. 11th International
Conference on Surface Forces, Moscow, 1996, p.57.
139
72
Киселёва О.А., Соболев В.Д., Чураев Н.В. Скольжение водных
растворов бромида цетилтриметиламмония при течении в тонких кварцевых
капиллярах. //Коллоид. Ж. -1999. -Т.61. -N.2. -С.287-288.
73
Толстой Д.М. Скольжение ртути по стеклу. //Докл. АН СССР -
1952. -Т.85. -С.1089-1092.
74
Сомов А.Н. Скольжение ртути в кварцевых микрокапиллярах.
//Коллоид. Ж. -1982. -Т.44. -С.160-163.
75
Debye P., Cleland R.L. Flow of liquid hydrocarbons in porous Vycor.
//J. Appl. Phys. -1959. -V.30. -P.843-849.
76
Redon C., Brzoska J.B., Brochard-Wyart F. Dewetting and slippage of
microscopic polymer films. //Macromolecules -1994. -V.27. -P.468-471.
77
Inn Y.W., Wang S.Q. Molecular interfacial slip between solid and
liquid in polymer suspensions of hard spheres. // Langmuir -1995. -V.11. -N.5. P.1589-1594.
78
de Gennes P.G. Ecoulement viscosimetriques de polymers enchevetres.
// C.R. Acad. Sci. -1979. -V.288B. -P.219-220.
79
Brochard F., de Gennes P.G. Shear-dependent slippage at a
polymer/solid interface. //Langmuir -1992. -V.13. -P.3024-3028.
80
Pit R., Hervet H., Leger L. Friction and slip of a simple liquid at a solid
surface. //Tribology letters -1999. -V.7. -N.2-3. -P.147-152.
81
Batchelor G.K., An introduction to fluid dynamics. - Cambridge:
Cambridge Univ. Press. - 1967.
82
Bocquet L., Barrat J.L. Hydrodynamic boundary conditions and
correlation functions of confined fluids. //Phys. Rev. Lett. -1993. -V.70. -N.18. P.2726-2729.
83
Happel J., Brenner H., Low Reynolds number hydrodynamics. - The
Hague: Martinus Nijhoff. - 1983.
140
84
Толстой Д.М. Молекулярная теория скольжения жидкостей по
твердым поверхностям. //Докл. АН СССР -1952. -Т.85. -С.1089-1092.
85
Blake T.D. Slip between a liquid and a solid: D.M. Tolstoi's (1952)
theory reconsidered. //Colloids Surfaces -1990. -V.47. -P.135-145.
86
Ruckenstein E., Rajora P. On the no-slip boundary condition of
hydrodynamics. //J. Colloid Interface Sci. -1983. -V.96. -P.488-491.
87
Barrat J.L., Bocquet L. Influence of wetting properties on
hydrodynamic boundary conditions at a fluid/solid interface. //Faraday Discuss. 1999. -V.112. -P.119-127.
88
Barrat J.L., Bocquet L. Large slip effect at a nonwetting fluid-solid
interface. //Phys. Rev. Lett. -1999. -V.82. -N.23. -P.4671-4674.
89
Stevens M.J., Mondello M., Grest G.S., Cui S., Cochran H.D.,
Cummings P.T. Comparison of shear flow of hexadecane in a confined geometry and
in bulk. //J. Chem. Phys. -1997. -V.106. -N.17. -P.7303-7314.
90
Ruckenstein E., Churaev N.V. A possible hydrodynamic origin of the
forces of hydrophobic attraction. //J. Colloid Interface Sci. -1991. -V.147. -N.2. P.535-538.
91
Bunkin N.F., Kiseleva O.A., Lobeyev A.V., Movchan T.G., Ninham
B.W., Vinogradova O.I. Effect of salts and dissolved gas on optical cavitation near
hydrophobic and hydrophilic surfaces. //Langmuir -1997. -V.13. -N.11. -P.30243028.
92
Crum L.A.,
In: Cavitation and Inhomogeneities in Underwater
Acoustics. edited by W. Lauterborn, New York, 1980).
93
Bunkin N.F., Bunkin F.V. The new concept in the optical breakdown of
transparent liquids. //Laser Physics -1993. -V.3. -N.1. -P.63-78.
141
94
Bunkin N.F., Lobeyev A.V. An influence of the dissolved gas on the
optical breakdown and the small angle scattering of light in liquids. //Physics Letters
A -1997. -V.229. -P.327-333.
95
Бункин Н.Ф., Виноградова О.И., Куклин А.И., Лобеев А.В.,
Мовчан Т.Г. К вопросу о наличии воздушных субмикропузырей в воде:
эксперимент по малоугловому рассеянию нейтронов. //Письма в ЖЭТФ -1995. Т.62. -С.660-663.
96
Epstein P.S., Plesset M.S. On the stability of gas bubbles in liquid-gas
solutions. //J. Chem. Phys. -1950. -V.18. -P.1505-1509.
97
Evans R., Marconi U.M.B. Phase equilibria and solvation forces for
fluids confined between parallel walls. //J. Chem. Phys. -1987. -V.86. -N.12. P.7138-7148.
98
Bunkin N.F., Lobeyev A.V., Ninham B.W., Vinogradova O.I.
Submicrobubble structure of water and electrolyte solution in bulk, and between
hydrophobic and hydrophilic surfaces. 48th Annual Meeting on Colloid and Surface
Chemistry: Microparticles and Self-Assembly, Sapporo, 1995, p.344-345.
99
Bunkin N.F., Kochergin A.V., Lobeyev A.V., Ninham B.W.,
Vinogradova O.I. Existence of charged submicrobubble clusters in polar liquids as
revealed by correlation between optical cavitation and electrical conductivity.
//Colloids Surfaces A -1996. -V.110. -P.207-212.
100
Vinogradova O.I., Bunkin N.F., Churaev N.V., Kiseleva O.A., Lobeyev
A.V., Ninham B.W. Submicrocavity structure of water between hydrophobic and
hydrophilic walls as reveald by optical cavitation. //J. Colloid Interface Sci. -1995. V.173. -P.443-447.
101
Bunkin N.F., Vinogradova O.I. On the formation of ultramicrobubbles
on the hydrophobic walls. 10th International Symposium on Surfactants in Solution,
Caracas, 1994, p.293.
142
102
Bunkin N.F., Lobeyev A.V., Ninham B.W., Vinogradova O.I. Salt,
dissolved gas, and submicrocavity structure near hydrophobic and hydrophilic walls
as revealed by optical cavitation. 3rd Liquid Matter Conference, Norwich, 1996,
p.P7-34.
103
Bunkin N.F., Lobeyev A.V., Ninham B.W., Vinogradova O.I. Salt,
dissolved gas, and submicrocavity structure near hydrophobic and hydrophilic walls.
10th Conference of the European Colloid and Interface Society, Abo, 1996, p.O-34.
104
Onsager L., Samaras N.T. The surface tension of Debye-Huckel
electrolytes. //J. Chem. Phys. -1934. -V.2. -P.528-536.
105
Bergeron V., Waltermo A., Claesson P.M. Disjoining pressure
measurements for foam films stabilized by a nonionic surfactant. //Langmuir -1996. V.12. -P.1336.
106
Yoon R.H., Yordan J.L. Zeta-potential measurements on microbubbles
generated using various surfactants. //J. Colloid Interface Sci. -1986. -V.113. -P.430438.
107
Kelsall G.H., Tang S., Yurdakul S., Smith A.L. Electrophoretic
behavior of bubbles in aqueous electrolytes. //J. Chem. Soc., Faraday Trans. -1996. V.92. -N.20. -P.3887-3893.
108
Kelsall G.H., Tang S., Smith A.L., Yurdakul S. Measurement of rise
and electrophoretic velocities of gas bubbles. //J. Chem. Soc., Faraday Trans. -1996. V.92. -N.20. -P.3879-3885.
109
Weissenborn P., Pugh R. Surface tension of aqueous solutions of
electrolytes: Relationship with ion hydration, oxigen solubility and bubble
coalescence. //J. Colloid Interface Sci. -1996. -V.184. -P.550.
110
Ninham B.W., Kurihara K., Vinogradova O.I. Hydrophobicity, specific
ion adsorption and reactivity. //Colloids Surfaces A -1997. -V.123-124. -P.7-12.
143
111
Krim J., Watts E.T., Digel J. //J. Vac. Sci. Technol. A -1990. -V.8. -
P.3417.
112
Richardson S. On the no-slip boundary condition. //J. Fluid. Mech. -
1973. -V.59. -P.707-719.
113
Einzel D., Panzer P., Liu M. Boundary condition for liquid flow:
Curved or rough surfaces. //Phys. Rev. Lett. -1990. -V.64. -P.2269-2272.
114
Alexeyev A.A., Vinogradova O.I. Flow of a liquid in a nonuniformly
hydrophobized capillary. //Colloids Surfaces A -1996. -V.108. -N.2-3. -P.173-179.
115
Lamb H., Hydrodynamics. - Cambridge: Cambridge Univ. Press. -
116
Виноградова О.И. О течении жидкости в капилляре вблизи зоны
1995.
капиллярно-осмотического скольжения. //Коллоид. Ж. -1992. -Т.54. -N.4. -С.2431.
117
Vinogradova O.I. Drainage of a thin liquid film comfined between
hydrophobic surfaces. //Langmuir -1995. -V.11. -N.6. -P.2213-2220.
118
Vinogradova O.I. Slippage of water over hydrophobic surfaces. //Int. J.
Mineral Proc. -1999. -V.56. -N.1-4. -P.31-60.
119
Vinogradova O.I. Slippage of liquids over hydrophobic surfaces. 48th
Annual Meeting on Colloid and Surface Chemistry: Microparticles and SelfAssembly, Sapporo, 1995, p.562-563.
120
Vinogradova O.I. Slippage of water over solid hydrophobic surface.
3rd Liquid Matter Conference, Norwich, 1996, p.L7-6.
121
Reed L.D., Morrison F.A.J. Particle interactions in viscous flow at
small values of Knudsen number. //J. Aerosol Sci. -1974. -V.5. -P.175-189.
122
Vinogradova O.I. Hydrodynamic interaction of curved bodies allowing
slip on their surfaces. //Langmuir -1996. -V.12. -P.5963-5968.
144
123
Reynolds O. On the theory of lubrication and its application tp Mr.
Beauchamp Tower's experiments, including and experimental determination of the
viscosity of olive oil. //Phil. Trans. Roy. Soc. London -1886. -V.177. -P.157-234.
124
Cox R.G. The motion of suspended particles almost in contact. //Int. J.
Multiphase Flow -1974. -V.1. -P.343-371.
125
Vinogradova O.I. On the atachment of hydrophobic particles to a
bubble on their collision. //Colloids Surfaces A -1994. -V.82. -P.247-254.
126
Vinogradova O.I. Coagulation of hydrophobic and hydrophilic solids
under dynamic conditions. //J. Colloid Interface Sci. -1995. -V.169. -N.2. -P.306-312.
127
Hocking L.M. The effect of slip on the motion of a sphere close to a
wall and of two adjacent spheres. //J. Eng. Math. -1973. -V.40. -P.607-658.
128
Потанин А.А., Урьев Н.Б., Муллер В.М. Критерий коагуляции
частиц в динамических условиях с учётом проскальзывания жидкости у
поверхности частицы. //Коллоид. Ж. -1988. -T.50. -N.3. -C.493.
129
Виноградова О.И. О прилипании частиц различной степени
гидрофобности к пузырьку при столкновении. //Коллоид. Ж. -1993. -Т.55. -N.4.
-С.21-29.
130
Виноградова
О.И.
Гидродинамическое
взаимодействие
гидрофобного и гидрофильного тел. //Коллоид. Ж. -1994. -Т.56. -N.1. -С.39-44.
131
Ландау Л.Д., Лифшиц Е.М., Гидродинамика. - М: Наука. - 1988.
132
Davis R.H., Serayssol J.M., E.J. H. The elastohydrodynamic collision
of two spheres. //J. Fluid Mech. -1986. -V.163. -P.476-497.
133
Derjaguin B.V., Muller V.M., Toporov Y.P. Effect of contact
deformation on the adhesion of particles. //J. Colloid Interface Sci. -1975. -V.53. N.2. -P.314-326.
134
Hughes B.D., White L.R. 'Soft' contact problems in linear elasticity.
//Q. J. Mech. Appl. Maths. -1979. -V.32. -N.4. -P.445-471.
145
135
Hughes B.D., White L.R. Implications of elastic deformation on the
direct measurement of surface forces. //J.C.S. Faraday 1 -1980. -V.76. -P.963-978.
136
Vinogradova O.I., Feuillebois F. Elastohydrodynamic collision of two
surfaces allowing slip on their surfaces. //J. Colloid Interface Sci. -2000. -V.221. N.1. -P.1-12.
137
Виноградова О.И. Гидродинамическое взаимодействие двух
скрещенных гидрофобных цилиндров. //Коллоид. Ж. -1996. -Т.58. -С.590-594.
138
Vinogradova O.I. Implications of hydrophobic slippage for the
dynamic measurements of hydrophobic forces. //Langmuir -1998. -V.14. -N.10. P.2827-2837.
139
Horn R.G., Vinogradova O.I., Mackay M.E., Phan-Thien N.
Hydrodynamic slippage inferred from thin film drainage measurements in a solution
of nonadsorbing polymer. //J. Chem. Phys. -2000. -V.112. -N.14. -P.6424-6433.
140
Hough D.B., Ottewill R.H. Direct measurement of the pressure of
electrical double layer interaction. //Progress Colloid Polymer Sci. -1983. -V.68. P.101-112.
141
Muller V.M. Viscous resistance in electrolyte solutions when charged
surfaces approach each other. //Langmuir -1987. -V.3. -N.5. -P.621-625.
142
Muller V.M. Electroviscous effect when charged surfaces approach one
another in electrolyte solutions. //J. Colloid Interface Sci. -1990. -V.136. -N.1. -P.6167.
143
Warszynski P., van de Ven T.G.M. Electroviscous forces. //Faraday
Discuss. Chem. Soc. -1990. -V.90. -P.313-321.
144
Warszynski P., van de Ven T.G.M. Effect of electroviscous drag on the
coagulation and deposition of electrically charged colloidal particles. //Adv. Colloid
Interface Sci. -1991. -V.36. -P.33-63.
146
145
Vinogradova O.I. Possible implications of hydrophobic slippage on the
dynamic measurements of hydrophobic forces. //J. Phys.: Condens. Matter -1996. V.8. -P.9491-9495.
146
Horn R.G., Hirz S.J., Hadziioannou G., Frank C.W., Catala J.M. A
revaluation of forces measured across thin polymer films: Nonequilibrium and
pinning effects. //J. Chem. Phys. -1989. -V.90. -N.11. -P.6767-6774.
147
Yakubov G.E., Butt H.J., Vinogradova O.I. Interaction forces between
hydrophobic surfaces. Attractive jump as an indication of formation of "stable"
submicrocavities. //J. Phys. Chem. B -2000. -V.104. -N.15. -P.3407-3410.
148
Vinogradova
O.I.
Hydrophobic
slippage
and
the
dynamic
measurements of hydrophobic forces. 215th American Chemical Society National
Meeting, Dallas, 1998, .
149
Hoh J.H., Engel A. Friction effects on force measurements with an
atomic force microscope. //Langmuir -1993. -V.9. -N.11. -P.3310-3312.
150
O'Shea S.J., Welland M.E. Atomic force microscopy at solid-liquid
interfaces. //Langmuir -1998. -V.14. -N.15. -P.4186-4197.
151
Sader J.E. Friequency response of cantilever beams immersed in
viscous fluids with applications to the atomic force microscope. //J. Appl. Phys. 1998. -V.84. -N.1. -P.64-75.
152
Attard P., Schulz J.C., Rutland M.W. Dynamic surface force
measurement. 1. van der Waals collisions. //Rev. Sci. Instrum. -1998. -V.69. -P.38523866.
153
Vinogradova O.I., Yakubov G.E., Butt H.J. Dynamic effects on surface
force measurements. 4th Liquid Matter Conference, Granada, 1999, p.P8-71.
154
Feynmann R.P., Leighton R.B., Sands M., The Feynmann lectures on
physics. Addison-Wesley. - 1964.
147
155
Roters A., Johannsmann D. Distance-dependent noise measurements in
scanning force microscopy. //J. Phys.: Condens. Matter -1996. -V.8. -P.7561-7577.
156
Preuss M., Butt H.-J. Measuring the contact angle of individual
colloidal particles. //J. Colloid Interface Sci. -1998. -V.208. -P.468-477.
157
Виноградова О.И., Якубов Г.Э. Динамические эффекты при
измерениях сил в атомно-силовом микроскопе. Институт физической химии на
рубеже веков, Москва, 2000, c.60.
158
Cleveland J.P., Manne S., Bocek D., Hansma P.K. A nondestructive
method for determining the spring constant of cantilevers for scanning force
microscopy. //Review Scientific Instruments -1993. -V.64. -P.403-405.
159
Якубов Г.Э., Виноградова О.И. Краевые углы гидрофобных
микросфер: исследование влияния линейного натяжения. Институт физической
химии на рубеже веков, Москва, 2000, c.61.
160
Rapacchieta A.V., Neumann A.W. Force and free-energy analysis of
small particles at fluid interfaces. II. Spheres. //J. Colloid Interface Sci. -1977. -V.59.
-P.555-567.
161
Scheludko A., Toshev B.V., Bojadjiev D.T. Attachment of particles to
a liquid surface (Capillary theory of flotation). //J. Chem. Soc. Faraday Trans. I 1976. -V.72. -P.2815-2828.
162
Carambassis A., Jonker L.C., Attard P., Rutland M.W.
Forces
measured between hydrophobic surfaces due to submicroscopic bridging bubble.
//Phys. Rev. Letters -1998. -V.80. -N.24. -P.5357-5360.
163
Eriksson J.C., Ljunggren S. The lifetime of a colloid-sized gas bubble
in water and the cause of the hydrophobic attraction. //Colloids Surfaces A -1997. V.129-130. -P.151-155.
148
164
Rabinovich Y.I., Derjaguin B.V., Churaev N.V. Direct measurements
of long-range surface forces in gas and liquid media. //Adv. Colloid Interface Sci. 1982. -V.16. -P.63-78.
165
Vinogradova O.I. On the attachment of hydrophobic particles to a
bubble on their collision. 8th International Conference on Surface and Colloid
Science, Adelaide, 1994, p.133.
166
Потанин А.А., Урьев Н.Б., Муллер В.М. //Коллоид. Ж. -1987. -
T.49. -N.5. -P.915.
167
Barnocky G., Davis R.H. The effect of Maxwell slip on the
aerodynamic collision and rebound of spherical particles. //J. Colloid Interface Sci. 1988. -V.121. -N.1. -P.226-239.
168
Potanin A.A., Russel W.B. Hydrodynamic interaction of particles with
grafted polymer brushes and applications to rheology of colloidal dispersions. //Phys.
Rev. E. -1996. -V.54. -N.6. -P.6973-6973.
169
Vinogradova O.I. Calculation of hydrodynamic interaction of a mineral
particle with a bubble under the conditions of the mixed sorption coating of collector.
XVIII International Mineral Processing Congress, Sydney, 1993, p.745-749.
170
Vinogradova O.I. The criteria of attachment of the particles of different
hydrophobicity degree to a bubble under dynamic conditions. X International
Conference on Surface Forces, Moscow, 1992, p.113.
171
Vinogradova O.I. Coagulation of hydrophobic and hydrophilic solids
under dynamic
conditions. IUTAM
Sumposium Liquid-Particle Interactions in
Suspension Flows, Grenoble, 1994, p.C-3d.
172
Vinogradova O.I. Coagulation of hydrophobic particles under dynamic
conditions. ACS Semposium on Colloidal Particles: Surface Modification and
Stability, Anaheim, 1995, p.76-coll.
149
173
Miklavcic S.J. Deformation of fluid interfaces under double-layer
forces stabilized bubble dispersions. //Phys. Rev. E -1986. -V.54. -N.6. -P.65536556.
174
Rother M.A., Zinchenko A.Z., Davis R.H. Buoancy-driven coalescence
of slightly deformable drops. //J. Fluid Mech. -1997. -V.346. -P.117-148.
175
Leger L., Hervet H., Massey G. The role of attached polymer
molecules in wall slip. //TRIP -1997. -V.5. -N.2. -P.40-45.
176
Gould S.A.C., Drake B., Prater C.B., Weisenhorn A.L., Manne S.,
Kelderman G.L., Butt H.J., Hansma H., Hansma P.K., Magonov S. The atomic force
microscope: A tool for science and industry. //Ultramicroscopy -1990. -V.33. -P.9398.
177
Pittenger B., Cook D.J., Slaughterbeck C.R., Fain S.C. Investigation of
ice-solid interfaces by force microscopy: Plastic flow and adhesive forces. //J. Vac.
Sci. Technol. A -1998. -V.16. -P.1832-1837.
178
Hertz H. Ueber die Beruehrung fester elastischer Koerper. //J. reine und
angewandte Mathematik -1882. -V.92. -P.156-171.
179
Hardy C., Baronet C.N., Tordion G.V. Elastoplastic indentation of a
half space by a rigid sphere. //J. Numerical Methods in Engineering -1971. -V.3. P.451.
180
Meyers G.E., DeKoven B.M., Seitz J.T. Is the molecular surface of
polystyrene really glassy? //Langmuir -1992. -V.8. -N.9. -P.2330-2335.
181
Kajiyama T., Tanaka K., Takahara A. Study of the surface glass
transition behaviour of amorphous polymer film by scanning-force microscopy and
surface spectroscopy. //Polymer -1998. -V.39. -N.19. -P.4665-4673.
150
ПРИЛОЖЕНИЕ 1.
НЕКОТОРЫЕ ДЕТАЛИ МОДЕЛИ ГИДРОФОБНОГО
ПРОСКАЛЬЗЫВАНИЯ.
Идея подхода состоит в том, что cкольжение является кажущимся:
объёмная жидкость контактирует со смачивающей плёнкой газоподобной фазы.
Рассматривается
сдвиговый
поток
пластинами. Расстояние между пластинами
между
двумя
параллельными
обозначаем L (по оси x ), а
относительную скорость вдоль y , обозначаем как Δv . Также считаем b - длина
скольжения, η b - вязкость в объёме, η s - вязкость поверхностного слоя, а δ толщина поверхностного слоя (Рис.П1.1). Мы ищем стационарный профиль
скорости насыщенной
реальные
системы
системы. Система считается насыщенной, так как
представляют
собой
разбавленный
раствор
газа,
находящийся в равновесии с атмосферой. Объём системы находится, таким
образом,
на
(концентрационной)
бинодали.
Для
простоты
здесь
рассматривается однокомпонентная система, исходное состояние которой
соответствует бинодали.
Вывод базового уравнения для длины скольжения.
Наша примитивная модель использует следующие упрощения:
1. Поверхностные слои содержат только газ.
2. Объёмный и поверхностные слои однородны, т.е. интенсивные
свойства (вязкость, теплопроводность, химический потенциал и плотность)
одинаковы по всему объёму.
Нетрудно показать, что скорость жидкости в точке x есть
151
x
⎧
v 0 + vδ , 0 < x < δ
⎪
δ
⎪⎪
x −δ
(Δv − 2vδ ), δ < x < L − δ
v = ⎨v0 + vδ +
δ
2
L
−
⎪
x−L
⎪
v 0 + Δv +
vδ , L − δ < x < L
⎪⎩
δ
Уравнение движения имеет вид 0 = δ ix ⋅ ΔP ⋅ δ ( x − δ ) − δ iy ⋅ ∂ x η( x ) ⋅ ∂ x v ( x ) . На
границе раздела фаз η( x ) ⋅ ∂ x v ( x ) = const. Следовательно,
ηs ⋅
vδ
δ
= ηb ⋅
Δv − 2vδ
.
L − 2δ
Рис.П1.1
Схематическое изображение распределения скоростей в сдвиговом
потоке.
152
Последнее уравнение эквивалентно
условию минимума производства
энтропии. В тонкой щели выполнено условие постоянства давления ΔP = 0 , что
позволяет вывести
vδ
δ
=
ηb
η
= b
η s L − 2δ (η s − η b ) η s
Δv
⎛η
⎞
L + 2δ ⎜⎜ b − 1⎟⎟
⎝ ηs
⎠
Экстраполяция скорости до нуля даёт затем
⎛η
⎞
b = δ ⎜⎜ b − 1⎟⎟
⎝ ηs
⎠
Равновесная термодинамика образования газового слоя.
Базовое уравнение для длины скольжения содержит неизвестный
параметр δ . Как отмечается в главе 2, расслоение может быть обусловлено
только тем, что насыщенный раствор газа помещён в тонкую щель. Здесь мы
анализируем, возможна ли такая ситуация при L → ∞ , т.е. когда
(а)
к
плёнке
между
гидрофобными
поверхностями
приложимо
макроскопическое рассмотрение;
(б) L только определяет объём V и не действует как дополнительный
параметр поля (бинодаль не сдвинута по сравнению с объёмной).
В объёме система находится в состоянии μ = μ sat , P = Psat и ρ = ρ b
(жидкость). После образования смачивающей плёнки имеем плотности фаз
ρ s+ , ρ b+ , давление P + и т.д. (Рис.П1.2). Из баланса массы ρ b L = 2δρ s+ + ( L − 2δ ) ρ b+
получаем
ρ b+ = ρ b +
2δ
ρ b − ρ s+
L − 2δ
(
)
153
Рис.П1.2
Химический потенциал и давление в функции плотности.
154
Это означает, что ρ b+ > ρ b . Следовательно, P + > Psat . Иными словами,
перенасыщенная жидкость находится теперь в контакте с метастабильным
газом, плотность которого больше, чем была бы в равновесных условиях.
Очевидно также, что образование газоподобной плёнки, неизбежно вызывало
бы сдвиг химпотенциала как по сравнению с объёмом, так и между фазами.
Для сдвига химических потенциалов фаз можно записать
Δμ s = μ s+ − μ sat и Δμ b = μ b+ − μ sat , причём Δμ b < Δμ s (Рис.П1.2). Это даёт
сдвиг химпотенциала между фазами Δμ . Если P + > Pmax , то метастабильная
газовая плёнка не может быть образована.
Для малых пересыщений можно записать
μ
+
P = Psat +
∫ ρ (μ ' )dμ ' ≈ P
sat
+ ρ ( μ sat )( μ − μ sat ) .
μ sat
Откуда,
P + − Psat = ρ s ( μ s+ − μ sat ) = ρ s Δμ s
P + − Psat = ρ b ( μ b+ − μ sat ) = ρ b Δμ b
Такая ситуация, очевидно, не может реализоваться в равновесных
условиях. Однако, сдвиг химпотенциала может быть вызван сдвиговым
потоком, как показано ниже.
Изменение химического потенциала при сдвиговом расслоении
смеси.
Для потоков вещества имеем
jb = − Lnn ∇
j s = − Len ∇
μ
T
μ
T
+ Lne ∇
1
,
T
+ Lee ∇
1
.
T
Отсюда, учитывая jb = 0 , получаем
155
js =
Lee Lnn − Len Lne μ
∇
Lne
T
В то же время,
⎡ j
L
1⎤
1
0 = jb = Lnn ⎢ s − ee Δ ⎥ + Lne ∇ . Следовательно,
T
⎣ Len Lnn T ⎦
j s = − Λ ⋅ ∇T , где Λ =
Lee Lnn − Len Lne
1
. Так как ∇ = 0 , то можно записать
2
T
Lnn T
соотношение Онзагера j s =
∇
μ
T
=−
Len
L
jb = ne jb . Следовательно,
Lnn
Lnn
L
U + PV
U + PV
1
⋅
j , где мы учли ne =
.
2 s
Lnn
N
N
ΛT
Баланс энтропии может быть записан в виде
∂ 2x T ( x) = −
η
(∂ x v )2 T ( x) , где λ - теплопроводность. Отсюда можно получить
λ
ΔT η b η b Δv 2 δ
≈
⋅
⋅
⋅ , где T0
T0 η s λ g 2 L
Δμ = −
- температура на границе щели. Учитывая
S
ΔT , получаем выражение для сдвига химического потенциала в
N
результате расслоения текущей смеси
Δμ
δ
2
=−
ST0 η b 1 1 ⎛ Δv ⎞
⋅ ⋅
⋅ ηb ⎜ ⎟ L
N ηs λg 2 ⎝ L ⎠
Таким образом, сдвиг химического потенциала пропорционален отношению
вязкостей образовавшихся фаз, потоку тепла через границу раздела фаз в
2
1 ⎛ Δv ⎞
единицу времени η b ⎜ ⎟ L и обратно пропорционален теплопроводности
2 ⎝ L ⎠
граничной фазы.
156
ПРИЛОЖЕНИЕ 2.
НЕКОТОРЫЕ ДЕТАЛИ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
ЭКСПЕРИМЕНТА В SFA И ДРУГИЕ ПОЛЕЗНЫЕ ВЫРАЖЕНИЯ.
Деформация в условиях SFA.
При
большой
скорости
сближения
цилиндры
могут
быть
деформированы. Мы рассматриваем два цилиндра, оси которых параллельны y
и x, двигающихся в направлении друг друга вдоль оси z. Профиль давления
даётся формулой
p ( x, y ) = −
3ηRh dh *
y2
x2
H ⎡ H ⎛
6b ⎞⎤
*
H
=
h
+
+
p
,
с
,
,
=
−
+
p
2
1
ln
1
⎟
⎜
2 R1 2 R2
6b ⎢⎣ 6b ⎝
H ⎠⎥⎦
H 2 dt
где H ( x , y ) - расстояние между цилиндрами. Поскольку в SFA измеряется
только h + w(0) , нас будет интересовать только максимум деформации
w(0) =
ϑ ∞ ∞ p ( x, y )
dxdy . Подстановка сюда выражения для давления даёт
π −∫∞−∫∞ x 2 + y 2
w(0) = −3 ⋅ 2 −3 / 2 ηϑh −3 / 2 Φ ( R1 , R2 )
dh
w * (0),
dt
где
2
2π
I ( β ,0)
6b
6b ⎤
dϕ
⎛ h⎞ ⎡
w * (0) =
= 4⎜ ⎟ ⎢2 +
−2
+ 1⎥ , Φ ( R1 , R2 ) = Rh R g ∫
2
I (0,0)
h
h
⎝ 6b ⎠ ⎣
R2 cos ϕ + R1 sin 2 ϕ
0
⎦
Для цилиндров одного радиуса R1 = R2 = R , получаем Φ( R1 , R 2 ) = Φ( R) = 2πR 3 / 2 ,
т.е. выражение для деформации совпадает с выражением для геометрии
сфера+плоскость.
Решение уравнений движения и расчёт сил.
Здесь
поясняются
некоторые
детали
численного
решения
дифференциального уравнения (4.1). Сначала это уравнение преобразуется к
безразмерной форме
157
3 yδ [1 + φ s + y (γx − 1)]
dy
=
dx ⎛
1 ⎞
⎟⎟ ln(1 + 6 yδ ) − 1
⎜⎜1 +
⎝ 6 yδ ⎠
введением безразмерных констант
α=
6πηRh R g
K
и переменных
, β=
y=
Rg A
6h03 K
, γ =−
αv
h02
,δ=
R C
R B
h
b
, ε = g , ξ = 0 , χ = 3g
h0
h0 K
λ
h0 K
ht
h0
, x = 0 . Безразмерная функция φ s ( y ) характеризует
h
α
вклад поверхностных сил. Для силы ван-дер-Ваальса этот вклад может быть
записан в форме φ vdw = βy 3 , а для двух типов гидрофобных сил можно записать
φ sh = χy 3 и
⎛ ξ⎞
φ sh = εy exp⎜⎜ − ⎟⎟ .
⎝
y⎠
Безразмерное уравнение содержит только два гидродинамических
параметра ( δ и y ) и то же число параметров поверхностного потенциала φ sh
(т.е.
β , ε , χ и ξ ). Таким образом, оно также не может быть решено
аналитически. Для расчёта y ( x) при заданном φ s и разных δ используется
метод Рунге-Кутта-Фелберга 4/5 порядка. Точность расчёта y составляла 10 −6 .
Затем результат пересчитывался в h(t ) .
По
Fh =
известной
функции
y ( x)
можно
рассчитать
Fh
и
Fk :
Kh0
[1 + φ s ( y) + y(γx − 1)] , Fk = Kh0 [1 + y(γx − 1)] . Важным является то, что эти
y
y
уравнения дают явную зависимость сил от y ( x) . Теперь предположим, что в
системе присутствует проскальзывание, но его не учитывают при анализе
результатов, предполагая, что сопротивление сближению описывается теорией
Рейнольдса.
Тогда
предполагаемое
сопротивление
рассчитанное по динамической кривой, будет FR =
по
Рейнольдсу,
Kh0 3 yδ [1 + φ s ( y ) + y (γx − 1)]
⋅
.
y ⎛
1 ⎞
⎟⎟ ln(1 + 6 yδ ) − 1
⎜⎜1 +
⎝ 6 yδ ⎠
Таким образом, кажущееся притяжение можно оценить как Fh − FR .
158
Расчёт максимальной скорости сдвига в условиях SFA.
Латеральная компонента поля скорости описывается уравнением
vt =
Следовательно,
наблюдается
[
1
∇ t p( x, y ) z 2 − zH − bH
2η
]
⎧ ∂p ∂p ⎫
, ⎬ .
⎩ ∂x ∂y ⎭
, с v t = {v x , v y } и ∇ t p = ⎨
∂v t
1
=
∇ t p( x, y )[2 z − H ] ,
∂z 2η
при
z=0
и
z=H:
а
максимум
скорости
H
∇ t p ( x, y ) .
2η
γ& max =
сдвига
Вычисление
∇ t p ( x, y ) даёт
∇ t p( x, y ) =
γ& max =
6ηRh
dh
{R2 x, R1 y} , откуда
2
R H (6b + H ) dt
2
g
3Rh dh
R g2 dt
R22 x 2 + R12 y 2
H (6b + H )
. Максимумы γ& max расположены в точках,
где выполнены следующие условия:
∂ γ& max
∂x
=0 ;
∂ γ& max
∂y
=0 .
Физичные
решения системы имеют вид
(а) x = 0, y = 0 ; (б) x = 0, y = ±
(в) y = 0, x = ±
2hR2
3
2hR1
g * − 1 − 3b / h ,
3
g * − 1 − 3b / h ;
где
g * = 4 + 24b / h + 9(b / h) 2 .
Подстановка решения (а) в выражение для скорости сдвига даёт γ& max = 0, что,
очевидно, не является максимумом функции
γ& max . Следовательно, для
нахождения наибольшего значения нужно проанализировать решения (б) и (в).
Стандартное рассмотрение вторых частных производных ведёт к выводу о том,
что максимальная скорость сдвига наблюдается в точках на оси, параллельной
цилиндру большего радиуса (x или y = 0), с координатами (y или x), где
159
⎛ b g * −1 ⎞
H = h⎜1 − +
⎟ .
3 ⎠
⎝ h
В этих точках скорость сдвига равна
γ& max =
9 2 Rh
h 3 2 3R min
g * − 1 − 3b / h
dh
,
dt ( 2 − 3b / h + g * )(2 + 15b / h + g * )
где Rmin есть наименьший из R1 и R2 . В случае, когда R1 = R2 , максимальная
скорость сдвига реализуется на окружности.
160
ПРИЛОЖЕНИЕ 3.
СКОЛЬЖЕНИЕ РАСТВОРА НЕАДСОРБИРУЕМОГО
ПОЛИМЕРА.
Здесь
описывается
модельный
эксперимент
в SFA,
в
котором
наблюдалось проскальзывание раствора неадсорбируемого полимера. Система
представляет особый интерес в связи с тем, что кажущееся проскальзывание
здесь
возникает
в
результате
расслоения
смеси,
т.е.
по
механизму
аналогичному гидрофобному. В то же время вытекание плёнки не осложнено
действием сил притяжения. Результаты этого приложения подробно описаны в
/141/.
Эксперимент.
Используемая
жидкость,
вообще
говоря,
является
вязко-упругой
жидкостью, часто называемой «идеальной упругой» жидкостью или жидкостью
Богера. Эта жидкость интенсивно используется реологами. Это обусловлено
тем, что жидкость Богера имеет практически неизменную вязкость в очень
широком интервале скоростей сдвига, описывается простой математической
моделью и не является утоньшающейся при сдвиге. Жидкость Богера
готовилась растворением гранул полиизобутилена (PIB) с молекулярным весом
M n = 1.5 ⋅ 10 6
керосина.
и полидисперсностью M w / M n ≈ 2 в небольшом количестве
После
этого
производилось
смешивание
с
расплавом
низкомолекулярного полимера поли(1-бутена) с M n ≈ 650 . В результате,
используемая жидкость Богера представляла собой раствор 0.1% PIB, 92.5%
полибутена и 7.4% керосина. Реологические характеристики жидкости
измерялись при 22.5 ± 0.5 ºС с помощью модифицированного Rheometrics fluids
spectrometer.
Кроме
того,
измерялись
реологические
характеристики
растворителя (полибутен+керосин, смешанные в той же пропорции).
161
Эксперимент
проводился в аппарате для измерения сил (радиусы
цилиндров R1 = 1.70 , R2 = 1.78 см, постоянная пружины K = 1.15 ⋅ 10 4 Н/м) в
атмосфере азота при комнатной температуре. Конец пружины, удалённый от
цилиндра, двигался в направлении фиксированного цилиндра с постоянной
скоростью в течение некоторого времени t s . Затем производилась остановка,
но сам цилиндр продолжал релаксировать в положение равновесия. Таким
⎧ K (h − h0 − Vt ), 0 < t < t s
.
⎩ K (h − h0 − Vt s ), t ≥ t s
образом, драйв-функция имела вид L(t ) = ⎨
Как было показано ранее, жидкость Богера описывается моделью
Oldroyd B, причем в пределе высоких скоростей сдвига модель даёт течение
Ньютоновской жидкости с вязкостью растворителя, а для малых скоростей
сдвига – течение Ньютоновской жидкости с вязкостью раствора полимера.
Результаты и обсуждение.
Модель жидкости даётся уравнениями
μp
μ p λ pω 2
μs
μ s λsω 2
+
η = μs + μ p , η′ =
, G′ =
+
,
2
2
2
2
1 + (λ s ω ) 1 + (λ p ω )
1 + (λ s ω ) 1 + (λ p ω )
где η - вязкость, измеренная в стационарном потоке, η ' - динамическая
вязкость, измеренная в осциллирующем сдвиговом потоке при частоте ω , а G '
- модуль упругости. В этих выражениях первый член даёт вклад растворителя,
а второй – полимера. Из реологических данных также получено μ s = 2.05 Па
сек, μ p = 0.45 Па сек, λ s = 0.0003 сек и λ p = 0.08 сек.
В системе нет равновесных сил отталкивания, а поверхностные силы
притяжения (ван-дер-Ваальса и деплеционная) очень малы для того, чтобы
повлиять на результаты /139/. Отсутствие сил отталкивания означает, что
высокомолекулярный полимер не адсорбируется на поверхности слюды.
На Рис.П3.1 (слева) приводится серия динамических кривых: движение
начинается приблизительно с одного расстояния и останавливается в разные
162
моменты времени. Вытекание плёнки между цилиндрами происходит быстрее,
чем вытекала бы Ньютоновская жидкость с той же вязкостью. Расчёт скорости
сдвига по уравнениям, выведенным в Приложении 2, показывает, что при
вытекании плёнки скорость сдвига может достигнуть 100 сек-1 , что больше
обратного времени релаксации ( λ−p1 ≈ 12.5 сек-1). Это указывает на то, что
упругость жидкости Богера может играть роль. В тоже время скорость сдвига
намного меньше обратного времени релаксации растворителя ( λ−s 1 ≈ 3000 сек-1),
поэтому применение модели Oldroyd B оправдано. Следовательно, жидкость
между цилиндрами не может вытекать быстрее, чем Ньютоновская
с
вязкостью растворителя. Однако, экспериментальные данные показывают, что
на расстояниях меньше 200 нм вытекание плёнки происходит ещё быстрее.
Этот факт можно объяснить проскальзыванием жидкости Богера относительно
поверхности
цилиндров.
На
Рис.П3.1
(справа)
приводятся
те
же
экспериментальные данные, что и на Рис.П3.1 (слева), но с расчётами в
предположении проскальзывания, причём длина скольжения увеличивается с
30 нм для кривой, оканчивающейся на расстоянии больше 800 нм, до 50 нм для
кривой, оканчивающейся на расстоянии менее 30 нм. Это означает, что длина
скольжения, скорее всего, слабо зависит от скорости сдвига и/или толщины
плёнки. Недостаточно хорошее совпадение теории и эксперимента для самой
нижней кривой связано с эластогидродинамической деформацией.
Найденная длина скольжения намного меньше, чем было бы для
расплава полимера (десятки микрон) /78,175/. В то же время, она намного
больше, чем если бы скольжение было вызвано образованием слоя
растворителя на поверхности цилиндров, что можно было бы ожидать из-за
того, что полимер не адсорбируется на твёрдой поверхности. Тогда, используя
уравнение для длины скольжения и полагая, что толщина δ равна радиусу
гирации 10 нм, получаем b = 2.2 нм. Экспериментальные величины по крайней
мере на порядок отличаются от этой величины. Это означает, что кажущее
163
1000
1000
900
900
800
800
700
700
600
h (nm)
h (nm)
600
500
500
400
400
300
300
200
200
100
100
0
0
0
5
10
15
0
20
5
10
15
20
t (s)
t (s)
Рис.П3.1
(Слева) Серия динамических кривых, полученных при скорости
сближения –172 нм/сек. Сверху вниз h0 = 966.4 , 957.3, 954.1, 941.4, 937.4, 924.0,
925.0 и 904.3 и ts = 1.01, 2.22, 3.06, 4.09, 4.74, 5.18, 5.50 и 6.14 сек. Символы
соответствуют экспериментальным данным, линии – расчётам для
Ньютоновской жидкости с вязкостью 2.5 Па сек и граничным условиям
прилипания. (Справа) Те же данные вместе с теоретическими кривыми,
полученными в предположении проскальзывания. Сверху вниз b = 30, 40, 45,
50, 50, 50, 50 и 50 нм.
164
скольжение, скорее всего, обусловленно расслоением смеси. В том числе, не
исключена вероятность выделения слоя керосина на поверхности.
Таким образом, получены экспериментальные доказательства того, что
уравнения для силы гидродинамического сопротивления, выведенные в главе 3,
хорошо описывают эксперимент при проскальзывании, происходящему по
механизму расслоения смеси.
165
ПРИЛОЖЕНИЕ 4.
НЕКОТОРЫЕ АСИМПТОТИЧЕСКИЕ РЕШЕНИЯ ДЛЯ ОТКЛОНЕНИЯ
КАНТИЛЕВЕРА AFM.
Асимптотическое решение для узкого кантилевера.
Предположение ε << 1 и оценка порядков величин позволяет сделать
дополнительное упрощение ∇t ≈ ∂ / ∂y , что позволяет найти отклонение конца
кантилевера аналитически. Принимая во внимание, что p = 0
при y = 0 и
y = w , можно получить
6ηy ( y − w)v
p=
( H + α ( L − x)) 3
и, затем,
ηvw 3 ( L − x) 2
M =−
. Это ведёт к
2 H 2 ( H + α ( L − x))
d 2z
3ηvw 3 ( L − x) 2
=−
следующему уравнению для формы кантилевера
.
dx 2
2 KL3 H 2 ( H + α ( L − x))
Решение даёт отклонение конца
3
3vηL ⎛ w ⎞
Δ z ( L) = −
⎜ ⎟ γ 1*,
8k ⎝ H ⎠
где γ 1* =
⎛ 1 ⎞⎤
4γ ⎡ 3γ
+ 3γ 2 − 3γ 3 ln⎜⎜1 + ⎟⎟⎥ .
⎢1 −
3 ⎣
2
⎝ γ ⎠⎦
Гидродинамическая сила, действующая на кантилевер есть
wL
Fh ≈ ∫ ∫ p ( x, y )dydx = −
0 0
ηvLw 3 (2 H + αL)
. Следовательно, для того, чтобы
2 H 2 ( H + αL) 2
вызвать такое же отклонение, концентрированная сила (равная K ⋅ Δ z (L) )
должна быть намного слабее, чем гидродинамическая сила.
Асимптотическое решение для горизонтального кантилевера.
Здесь даётся асимптотическое решение уравнения для широкого
кантилевера в предположениии α = 0
∂2 p ∂2 p
+
=ζ
∂x 2 ∂y 2
166
p − ζy ( y − w ) / 2
Функция
нечётная, удовлетворяет уравнению Лапласа и
обращается в ноль при y = 0 и y = w . Следовательно решение уравнения имеет
вид
p=
ζ
2
w ψ (ψ − 1) + ∑ sin(mπψ )⎡⎢ A
∞
2
⎣
m =1
m
⎛ mπx ⎞
⎛ mπx ⎞⎤
cosh ⎜
⎟ + Bm sinh ⎜
⎟⎥
⎝ w ⎠
⎝ w ⎠⎦
где ψ = y / w . Коэффициенты Am и Bm находятся в соответствии с граничными
условиями p = 0 при x = 0 и x = L . Условие при x = 0 требует
0=
ζw 2
2
∞
ψ (ψ − 1) + ∑ Am sin(mπψ ) ,
m =1
что позволяет оценить коэффициенты Am по формуле Фурье
2 ζw3
2ζw2
ψ
(
ψ
−
1
)
sin(
π
m
ψ
)
=
−
(cos πm − 1)
w ∫0 2
m3π 3
1
Am = −
Граничное условие при x = L требует
0=
ζw 2
2
∞
⎡
m =1
⎣
⎛ mπ ⎞
⎛ mπ
⎟ + Bm sinh ⎜
⎝ ε ⎠
⎝ ε
ψ (ψ − 1) + ∑ sin(mπψ ) ⎢ Am cosh⎜
⎞⎤
⎟⎥ ,
⎠⎦
что даёт
⎛
⎛ πm ⎞ ⎞
⎜⎜ cosh⎜
⎟ − 1⎟⎟
⎝ ε ⎠ ⎠
⎝
Bm = − Am
. Следовательно,
⎛ πm ⎞
sinh ⎜
⎟
⎝ ε ⎠
p=
ζw
2
2
y ( y − w) −
2ζw
π3
2
∞
∑
m =1
⎛ πm(1 − 2ξ ) ⎞
cosh ⎜
⎟
f (ξ )
2ε
⎝
⎠.
sin(mπψ )(cosπm − 1) , где f (ξ ) =
3
m
⎛ πm ⎞
cosh ⎜
⎟
⎝ 2ε ⎠
После интегрирования, для момента вращения получаем
M = −ζw3 L2 M * , где
⎛
⎞
⎛ πm(1 − 2ξ ) ⎞
⎜
⎟
ε cosh⎜
⎟
(ζ − 1)
8ε
1 ⎜
2ε
⎛ πm ⎞ ⎟
⎝
⎠
− 6 ∑
−ε +
− πm(ξ − 1) tanh⎜
M* =
⎟ .
π m =1, Δm = 2 m6 ⎜
24
2ε ⎠ ⎟
⎛ πm ⎞
⎝
cosh⎜
⎟
⎜
⎟
⎝ 2ε ⎠
⎝
⎠
2
∞
167
3
d 2Δ z
36ηVL ⎛ w ⎞
=−
Затем решение дифференциального уравнения
⎜ ⎟ M *,
2
dξ
K ⎝H⎠
даёт отклонение конца кантилевера
36ηVL ⎛ w ⎞
Δ z ( L) = −
⎜ ⎟
K ⎝H⎠
3
⎡
⎢ 1 8ε
⎢ − 7
⎢ 96 π
⎢⎣
∞
∑
− 3εmπ + 2(3ε 2 + m 2π 2 ) tanh
⎥
⎥
⎥⎦
6m 6
m =1, Δm = 2
πm ⎤
2ε ⎥ .
Наклон кантилевера.
Важным фактором при интерпретации результатов может быть то, что,
строго говоря, в AFM эксперименте измеряется не отклонение кантилевера
Δ z (L) , а разница в его наклоне Δ(dz / dx) для разных позиций пьезотранслятора
/176/. При действии концентрированной силы F , приложенной к концу
кантилевера, эти две характеристики связаны уравнением Δ z =
2 L ⎛ dz ⎞
Δ⎜ ⎟ , что
3 ⎝ dx ⎠
⎛ dz ⎞ 3F
.
⎟=
⎝ dx ⎠ 2 KL
даёт Δ⎜
При отклонении кантилевера вязким потоком, аналогичное соотношение
имеет вид:
(
)
2 L ⎛ dz ⎞ *
1 − 2γ + 2γ 2 ln 1 + γ −1
*
Δz =
Δ⎜ ⎟γ 2 , где γ 2 =
.
3 ⎝ dx ⎠
1 − 3γ / 2 + 3γ 2 − 3γ 3 ln 1 + γ −1
Однако,
(
)
в большинстве AFM экспериментов поправкой на наклон
можно пренебречь.
Приближение второго порядка для расчёта отклонения кантилевера.
В главе 4 дано решение задачи об отклонении кантилевера в первом
приближении, в предположении, что давление не возмущено смещением
кантилевера. Однако, отклонение кантилевера может вызвать изменения
давления /136/:
p (1) = p +
dp
Δ z . Это новое давление стремится вернуть
dH
кантилевер в исходное положение, так как p (1) < p , если Δ z > 0 и dp / dH < 0 . В
168
результате, действительное отклонение кантилевера будет заключено между
аппроксимациями второго и первого порядков. После достаточно трудоёмких
вычислений можно показать, что решение второго порядка может быть
выражено через первое приближение для Δ z :
⎡
⎛ 1 ⎞ ⎞⎤
⎛ 1⎞
3τ ⎛
2
1
1
⎜1 − 3 − 2 +
⎜⎜1 + ⎟⎟ ⎟⎟⎥ ,
⎟
⎜
ln
1
ln
γ
+
Δ(z2) = Δ z ⎢1 −
+
+
⎟
⎜
⎜
2γ
6γ
⎢⎣ 2(1 + γ ) ⎝ 3γ
⎝ γ ⎠ ⎠⎥⎦
⎝ γ⎠
где
τ=
ηw 3 v
.
α 4 KL3
Расчёт, однако, показал, что отклонения теории от эксперимента не связаны с
неучётом поправок второго и более высокого порядков.
169
ПРИЛОЖЕНИЕ 5.
ВЛИЯНИЕ ПЛАСТИЧЕСКОЙ ДЕФОРМАЦИИ НА ЛИНИЮ КОНТАКТА
ПРИ ИЗМЕРЕНИЯХ СИЛ С ПОМОЩЬЮ AFM.
В этом приложении дается теоретический анализ пластической
деформации в условиях измерения сил в атомно-силовом микроскопе. В
качестве модельной системы для проверки предсказаний теоретической модели
используется лёд. Выбор льда обусловлен тем, что (а) деформация льда
считается пластической, (б) силовые кривые, полученные для льда, во многом
подобны силовым кривым для полистирола. В обоих случаях, наблюдается
скачок в контакт, а контактная линия имеет вогнутую форму.
Измерения сил могут дать информацию о механических свойствах
взаимодействующих тел. Часто интерпретация силовой кривой осложнена
деформацией. В работе /177/ была предложена модель пластического
сдавливания,
позволяющая
связать
глубину
проникновения
зонда
и
приложенную силу с пределом текучести тела. В общем случае, первая реакция
твёрдого тела является упругой (Рис.П5.1). В соответствии с теорией Герца
/178/
давление на оси максимально.
При некоторой нагрузке давление
достаточно для того, чтобы вызвать пластическую деформацию. Пластическая
зона, однако, мала и заключена в материале, остающемся упругим. При
увеличении нагрузки погружение увеличивается
и в какой-то момент
пластичекая зона выдавливается на свободную поверхность. Это истинно
пластическое погружение устанавливается когда давление достигает величины
порядка P ≈ 3Y , где Y - предел текучести. Важным замечанием является то, что
давление в зоне пластической деформации одинаково по всей площади
контакта /179/.
Для всех расчётов используется параболическая форма зонда (Рис.П5.2)
170
z = −D +
r2
,
2R
с радиусом кривизны R и погружением D. Рассматриваются три силы
(1) Отталкивание, вызванное давлением под зондом FP.
(2) Упругая сила кантилевера Fext = K ⋅ (D0 − D ) , где D0 – позиция нулевого
отклонения пружины. Образец двигается в направлении кантилевера с
постоянной скоростью v0: D0 = v0 ⋅ t − DL , где DL – толщина жидкоподобного
слоя. Мы считаем, что t = 0 , когда кантилевер контактирует с твёрдой
поверхностью.
(3) Дальнодействующая сила притяжения. Это, в основном, капиллярная сила
Fcap. Поверхностные силы, обычно, намного меньше.
Уравнение движения, таким образом, имеет вид:
− FP + K ⋅ (v0t − DL − D ) + Fcap = 0
В модели пластической деформации мы предполагаем, что давление
распределено равномерно и не зависит от r. Тогда сила равна произведению
площади πr 2 = 2πRD на давление: FP ( D) = 2πRDP . Мы также пренебрегаем
временем, необходимым для вытекания прастической зоны из щели. Для
P ≥ 3Y время плавления dD dt считается пропорциональным разнице между
давлением и давлением предела текучести:
dD
= a(P − 3Y )
dt
Параметр
a определяет скорость плавления и погружения. В общем
случае он зависит от температуры и структуры тела. В результате, получаем
нелинейное дифференциальное уравнение
2πR
dD
⋅D⋅
+ (K + 6πRY ) ⋅ D − Kv0 ⋅ t − Fcap = 0
a
dt
171
Нагрузка
Деформация
Упругая
Пластическая
Пластическая
Рис.П5.1
Упругая и пластическая деформация, ожидаемая для жёсткого зонда при малой,
промежуточной и большой нагрузке.
172
Рис.П5.2
Сверху: Тело параболической формы, проникающее в пластичную среду на
глубину D . На поверхности пластичного тела изображён жидкоподобный или
гель-слой ( LL ). Снизу: Диаграмма, иллюстрирующая обозначения D и D0
173
8
v =100 μ m/s
6
8
0.87 μ m/s
30
Force / nN
Force / nN
6
10
4
3
2
1
0
11 μ m/s
4
85 μ m/s
2
mica
0
0.3
0
2
4
6
-100
8
-75
-50
-25
0
25
Distance / nm
Indentation D ap / nm
Рис.П5.3
Слева: Кривые сила/кажущееся погружение, рассчитанные для
различных скоростей. Параметры: Y =4 МПа, R =50 нм, a =10-13 м2 сек/кг и
Fcap =30 нН. Справа:
Кривые сила/расстояние, полученные для льда при -10ºС и скоростях
пьезо 0.87, 11 и 85 мкм/сек. Кроме того, приводится результат для жёсткой
слюды при той же температуре.
174
В общем случае оно решается только численно. В отсутствие
жидкоподобного слоя, аналитическое решение имеет вид
2
⎛
aKv0 a( K + 6πRY ) ⎞⎟
⎛ a( K + 6πRY ) ⎞
⎜
D = t ⋅⎜ ⎜
−
⎟ +
⎟⎟ ,
4πR
2πR
4πR
⎜ ⎝
⎠
⎝
⎠
т.е. в отсутствие силы притяжения погружение зависит линейно от
времени и даёт эффект кажущегося возрастания упругой постоянной пружины.
В случае равновесного погружения ( dD dt ≈ 0 ), когда пластическая зона
только достигает края контактной зоны, получаем
D=
Fcap
K + 6πYR
+
Kv0
⋅t
K + 6πYR
для t>0, что согласуется с результатом работы /177/, где было найдено,
что сила, действующая на зонд, Fcap + Kv0 t − DK , равна 6πYRD .
Расчёт кривых сила-погружение показывает, что скачок в контакт может
быть следствием не только капиллярной силы, но и пластической деформации,
что ведёт к завышению толщины слоя или капиллярной силы /46/ (Рис.П5.3).
Полученные результаты показывают, что в случае пластической
деформации контактной зоны должна наблюдаться зависимость формы линии
контакта от скорости движения пьезотранслятора. Измерения силовых кривых
в случае полистироловых поверхностей показывают, что форма контактной
кривой от скорости не зависит (Рис.П5.4). Поэтому можно заключить, что
контактная деформация не является пластической, как можно было бы
предположить на основании работ /180,181/.
175
1
2
3
20
Deflection [nm]
10
0
-10
-20
-30
-40
-50
-1
0
1
2
3
4
5
Distance [nm]
Рис.П5.4
Контактные линии для полистироловых поверхностей, полученные при
скоростях пьезотранслятора 3.482 (1), 10.445 (2) и 158.656 (3) мкм/сек.