МИНОБРНАУКИ РОССИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕ- ЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
реклама

МИНОБРНАУКИ РОССИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ В Г. ТАГАНРОГЕ
(ТТИ Южного федерального университета)
Факультет автоматики и вычислительной техники
УТВЕРЖДАЮ
Декан ФАВТ__________В.М. Вишняков
"_____"__________________2011 г.
Рабочая программа дисциплины
Интегрированные системы проектирования и управления
(Наименование дисциплины)
Направление подготовки
230100.62 «Информатика и вычислительная техника»
Профиль подготовки
Автоматизированные информационно-управляющие системы и комплексы
Квалификация (степень) выпускника
Бакалавр
Форма обучения
Очная
(очная, очно-заочная и др.)
г. Таганрог
2011
1. Цели освоения дисциплины
Целями освоения дисциплины “Интегрированные системы проектирования и
управления” (ИСПиУ) по профилю подготовки “Автоматизированные информационноуправляющие системы и комплексы” являются такие, как:
Цель 1. Удовлетворение потребностей личности в интеллектуальном, культурном и
нравственном развитии путем получения высшего образования в области информатики и
вычислительной техники;
Цель 2. Организация базовой бакалаврской подготовки, позволяющей всем выпускникам продолжить свое образование как с целью получения диплома инженера или
магистра в области информатики и вычислительной техники, так и с целью дальнейшего
самосовершенствования.
Цель 3. Удовлетворение потребностей общества в квалифицированных кадрах путем подготовки специалистов в области информатики и вычислительной техники,
а также будет способствовать достижению локальных целей профиля подготовки
«Автоматизированные информационно-управляющие системы и комплексы»:
1 цель профиля. Развитие у студентов теоретических знаний и практических навыков, позволяющих выпускникам понимать и применять фундаментальные и передовые
знания и научные принципы, лежащие в основе современных автоматизированных информационно-управляющих систем и комплексов при формулировании и решении инженерных задач;
2 цель профиля. Подготовка высококвалифицированных специалистов, способных
решать задачи исследования, проектирования, разработки, настройки, тестирования и эксплуатации современных автоматизированных информационно-управляющих систем и
комплексов в различных областях профессиональной деятельности, а также задачи планирования и проведения экспериментальных исследований свойств и характеристик данных
систем.
2. Место дисциплины в структуре ООП бакалавриата
Данная дисциплина относится к вариативной части профессионального цикла
(Б.3.ДВ1.2). Для успешного обучения студенту понадобятся знания в области таких дисциплин, как "Высшая математика", "Теория автоматического управления", "Электротехника, электроника и схемотехника ", "Метрология, стандартизация и сертификация", "Базы данных", "Сети и телекоммуникации". Навыки, полученные в процессе изучения дисциплины «Интегрированные системы проектирования и управления» потребуются в процессе подготовки бакалаврской выпускной квалификационной работы, а также в последующих дисциплинах образовательных программ подготовки инженеров и магистров.
3. Компетенции обучающегося, формируемые в результате освоения дисциплины:,
В результате освоения дисциплины обучающийся должен:
ОК-11- осуществлять сбор и анализ исходных данных для расчета и проектирования ИСПиУ,
ОК-12- производить расчёты и проектирование отдельных блоков и устройств и выбирать
стандартные средства автоматики, измерительной и вычислительной техники для проектирования ИСПиУ в соответствии с техническим заданием;
ПК-9 - сопрягать аппаратные и программные средства в составе информационных и автоматизированных систем;
ПК-7- освоить системный подход к процессам проектирования, подготовки производства
и управления производством;
ПК-8- математическое, методическое и организационное обеспечение, программно-
технические средства для построения ИСПиУ;
ПК-10 - перспективные информационные технологии (SCADA-системы) проектирования
ИСПиУ;
знать: основные проблемы, решаемые ИСПиУ, вопросы проектирования, подготовки
производства и управления производством,
уметь выполнять расчёты и проектирование отдельных блоков и устройств, выбирать
стандартные средства автоматики, измерительной и вычислительной техники в соответствии с техническим заданием на проектирование ИСПиУ, сопрягать аппаратные и программные средства;
владеть - способами и средствами получения, хранения, переработки информации,
навыками работы с компьютером как средством управления информацией, готовностью
участвовать в разработке технической документации и установленной отчетности по
утвержденным формам, настройкой и наладкой программно-аппаратных комплексов.
4. Структура и содержание дисциплины «Интегрированные системы проектирования и управления»
Вид учебной работы
Всего часов
Общая трудоемкость дисциплины
Аудиторные занятия
- лекции
- практические занятия
- лабораторные работы
- другие виды аудиторных занятий
Самостоятельная работа
Курсовой проект (работа)
Контроль самостоятельной работы
Аттестация: экзамен
№
п/п
1
Раздел дисциплины
“Интегрированные системы проектирования и управления”
Неделя семестра
Семестр 8
180/5ЗЕТ
56
12
22
22
81
11
32
Структура ИСПиУ и ее анализ. Методология проектирования ИСПиУ.
Виды учебной ра- Формы текущего конботы, включая
троля успеваемости
самостоятельную (по неделям семестра)
работу студентов и
Форма промежуточтрудоемкость (в
ной аттестации (по
часах)
семестрам)
лек лр пр с/р кср
2
3
2
Расчет параметров настройки непрерывного управляющего устройства (НУУ) в
соответствии с заданным вариантом.
3
Автоматизированные информационно-управляющие системы и комплексы. Примеры
4
Получение дискретных передаточных
функций для процессов интегрирования
и дифференцирования
Идентификация объекта управления на
учебном тренажерном стенде
Расчет параметров передаточных функций идентифицируемых объектов
Системные спецификации. Регламентирующая документация по проектированию. Технический и рабочий проекты
ИСПиУ.
Оценка влияния шага дискретности по
времени, величины шага квантования
по уровню в АЦП на точность и устойчивость ЦАС.
Построение модели цифроаналоговой
системы в пакете MATLAB
5
6
7
8
9
1
1
2
Реферат
5
2
2
1
3
4
4
3
2
3
2
4
Проверка расчетов и
оценки влияния каждого
из параметров настройки
НУУ на длительность переходного процесса, величину перерегулирования и точность отработки
заданных воздействий.
1
Проверка результатов
эксперимента по идентификации объекта управления на учебном тренажерном стенде
Результаты идентификации объектов управления
Проверка результатов
расчетов и эксперимента
по оценке влияния шага
дискретности по времени,
величины шага квантования по уровню в АЦП на
точность и устойчивость
ЦАС.
Структурные схемы
моделей цифроаналоговых систем
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
Алгоритм проверки на достоверность
для технологических переменных, неизменных во времени. Составление программы в виде m–файла в пакете
MATLAB
Проектирование 2-х уровневой системы
управления процессом нагрева на учебном тренажерном стенде
Расчет параметров настройки цифрового
управляющего устройства
Подсистемы ИСПиУ: оперативного планирования и управления основным производством, материально-технического
обеспечения, технико-экономического
планирования.
Алгоритм скользящего среднего. Составление программы в виде m–файла в
пакете MATLAB
Изучение подсистем ИСПиУ.
Алгоритм экспоненциального сглаживания. Составление программы в виде m–
файла в пакете MATLAB
4
2
1
4
Параметры настройки
ЦУУ и графики исследования ЦАС
5
5
2
3
1
Проверка работы программы «Скользящее
среднее»
2
4
6
2
Проектирование и исследование автоматизированной системы управления процессом нагрева в SCADA-системе
TRACE MODE
Изучение особенностей проектирования
системы управления в SCADA-системе
TRACE MODE
SCADA-системы. Создание информационной и математической базы операторской станции АРМ. Техника чтения и
начертания функциональных схем автоматизации. Примеры.
В соответствии с вариантом задания составить таблицу исходных данных. Выбрать датчики, необходимые для управления объектом в нормальном режиме
работы и контроля по предаварийным
ситуациям.
Поиск в Интернете датчиков для управления объектом в нормальном режиме
работы и контроля по предаварийным
ситуациям.
Рассчитать требуемую разрядность АЦП
и ЦАП и выбрать указанные устройства, записав быстродействие выбранного АЦП.
Проектирование и исследование автоматизированной системы управления процессом нагрева в системе MasterSCADA
Изучение особенностей проектирования
системы управления в системе MasterSCADA
3
3
1
4
2
3
Реферат
Проверка результатов
проектирования и исследования автоматизированной системы управления процессом нагрева в
SCADA-системе TRACE
MODE
Проверка в профайлере
трендов и работы компонентов системы
5
7
Проверка работы программы «Достоверность»
и результатов проектирования 2-х уровневой системы управления процессом нагрева на учебном тренажерном стенде
1
Проверка результатов
расчетов и выбора датчиков
2
8
2
4
Описание датчиков и их
характеристик
3
Проверка результатов
проектирования и исследования автоматизированной системы управления процессом нагрева в
системе MasterSCADA
4
4
1
Проверка в профайлере
трендов и работы компонентов системы
25
26
27
28
29
30
31
32
33
Цифровое управление аналоговыми
объектами. Общая методика оценки погрешности в цифровом управляющем
устройстве.
Рассчитать погрешность на входе микроконтроллера. Оценить допустимую
точность вычисления управляющего
воздействия.
Изучение расчета погрешностей вычисления кода управления
Оценить трансформированную погрешность вычисления управляющего воздействия.
9
2
2
Зачет по лабораторным работам
Подготовка к завершающему ответу
на контрольные вопросам
Подготовка к экзамену
3
Погрешности вычисления
кода управления
5
10
2
Архивирование данных и создание отчета тревог
Изучение разработки отчета тревог и
архива данных
Оценить погрешность метода вычисления управляющего воздействия. Выбор
модулей технической структуры. проверка быстродействия.
1
3
4
4
11
2
2
3
2
Оценка расчетов по выбору узлов для проектирования технической
структуры системы цифрового управления аналоговым объектом
1
Проверка расчета погрешности и результата
архивирования данных
Проверка функционирования отчета тревог и результата архивирования
данных
1 Окончательный рейтинг как
результат тестирования по
контрольным вопросам
4
32
Итоговая оценка
Экзамен
5. Образовательные технологии
В соответствии с требованиями ФГОС ВПО по направлению подготовки «Информатика и вычислительная техника» с целью реализации компетентностного подхода
предусматривается использование в учебном процессе компьютерное управление реальным объектом управления – процессом нагрева. В рамках учебного курса предусмотрены
встречи с представителями российских компаний и посещение предприятий ТАГМЕТ, ТАГАЗ,
ОАО «Красный котельщик».
6. Оценочные средства для текущего контроля успеваемости, промежуточной аттестации по итогам освоения дисциплины и учебно-методическое обеспечение самостоятельной работы студентов
Предусматривается дискуссионный форум по проблемно-ориентированной тематике,
сформулированной преподавателем, а именно, обсуждение рефератов по указанным ниже
темам.
Рефераты:
1. Автоматизированные информационно-управляющие системы и комплексы. Примеры
2. Подсистемы автоматизированных информационно-управляющих систем и комплексов.
КСР проводится в виде консультаций и проверки домашних заданий с последующим
разбором типичных ошибок. Для проверки текущих навыков и знаний студентам предлагаются следующие вопросы.
Контрольные вопросы для проведения текущего контроля и обсуждения тематики лекций, практических занятий и лабораторных работ.
1. Интегрированная автоматизированная система управления промышленным предприятием. Иерархическая функциональная система ИСПиУ.
2. Три уровня управления предприятием.
3. Отличие САУ от АСУ
4. Характеристики технологического процесса как объекта контроля и управления
5. Разновидности структур АСУТП. Примеры
6. Этапы проектирования АСУТП.
7. Функции АСУТП как последовательность отдельных процессов
8. Изучение объекта управления
9. Укрупненная структурная схема 2-х уровневой АСУ процесса нагрева. Задачи, реализуемые на учебном стенде АСУ процесса нагрева.
10. Структурная и принципиальная (выдается) схемы учебного стенда.
11. Методы идентификации объекта управления.
12. Расчет параметров ПИ закона управления для ОУ без запаздывания.
13. Расчет параметров ПИ закона управления для ОУ с запаздыванием.
14. Расчет параметров ПИД закона управления для ОУ с запаздыванием.
15. Механизм OPC для связи аппаратных модулей с каналами узлов проекта в SCADA
системе.
16. Получение алгоритма ПИД закона управления в разностной форме.
17. ПИД закон управления в разностной форме при использовании ШИМ. Временная
диаграмма сигнала с времяимпульсной модуляцией (см. справку Trace Mode).
18. Модель ЦАС. Зависимость показателей качества ЦАС от шага квантования по времени.
19. Модель ЦАС. Зависимость показателей качества ЦАС от величины кванта по
уровню.
20. Структура АСУТП. Подсистема сбора и первичной обработки информации.
21. КТС подсистемы сбора и первичной обработки информации. Пример.
22. Выбор датчиков подсистемы сбора и первичной обработки аналоговых сигналов.
23. Выбор модулей ввода/вывода подсистемы сбора и первичной обработки аналоговых сигналов.
24. Оценка аппаратной погрешности на входе микроконтроллера.
25. Блок-схема подпрограммы ввода аналоговых сигналов с опросом датчиков по методу последовательной таблицы.
26. Алгоритмическое обеспечение подсистемы сбора и первичной обработки аналоговых сигналов. Пересчет в технические единицы.
27. Алгоритмическое обеспечение подсистемы сбора и первичной обработки аналоговых сигналов. Проверка на технологические границы.
28. Проверка на достоверность для математического ожидания технологической переменной, не изменяемого во времени.
29. Проверка на достоверность для математического ожидания технологической переменной, изменяющегося во времени с постоянной скоростью.
30. Алгоритм скользящего среднего или скользящего окна.
31. Алгоритм экспоненциального сглаживания.
32. Вариант блок-схемы программы сбора и первичной обработки аналоговой информации.
33. Ввод и обработка дискретных сигналов.
34. Подсистема управления. Организация управления аналоговым объектом.
35. Управление мотором методом широтно-импульсной модуляции (ШИМ).
36. Преобразователь код/временной интервал
37. Характеристики многорежимных ТП.
38. Оценка погрешностей округления и метода программных модулей.
39. Оценка трансформированной погрешности программного модуля.
40. Оценка трансформированной погрешности при последовательном исполнении программных модулей.
41. Методика выбора комплекса технических средств (модулей ввода/вывода, микропроцессора) исходя из требуемых точности и быстродействия.
42. Предпроектная подготовка при разработке информационно-управляющих систем.
43. Функциональная схема автоматизации ТП.
44. Изображения некоторых средств измерения и автоматизации. Примеры обозначений.
45. Примеры простейших функциональных схем автоматизации и контроля.
46. Проектная документация. Заполнение таблиц.
47. Чтение функциональных схем на примере УПН.
Домашние задания.
Домашнее задание 1
ИССЛЕДОВАНИЕ ЛОКАЛЬНОЙ ЦИФРОАНАЛОГОВОЙ СИСТЕМЫ УПРАВЛЕНИЯ
Исследовать цифроаналоговую систему (ЦАС) с различными типами цифровых регуляторов. Выяснить влияние шага дискретности по времени, разрядности АЦП на качество процесса управления.
1. Краткие теоретические сведения
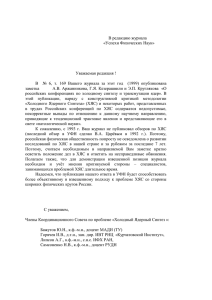
1.1. Структура локальной системы управления
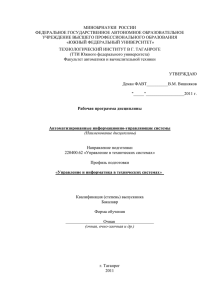
На рис. 1 представлена замкнутая локальная система нижнего уровня иерархической
структуры управления некоторым производственным процессом.
ОУ
ИМ
Управляющий
сигнал
РО
ТП
УУ
Д
Сигнал датчика
Задание
Рис. 1. Структура локальной системы управления
На этом рисунке введены следующие обозначения: ИМ – исполнительный механизм, РО – регулирующий орган, Д – датчик регулируемой переменной, ТП – технологический процесс, УУ – управляющее устройство, вырабатывающее сигнал управления в
соответствии с заданным или выбранным алгоритмом. РО, ТП и Д объединены в объект
управления ОУ.
Передаточная функция ОУ очень часто может быть представлена в виде
Kо
p
Wоу ( p)
e оу
(1)
(Tоу p 1)
при K o K oy K им K дат .
Наличие транспортного запаздывания τ оу в (1) объясняется тем, что оно присутствует во многих ТП таких, как процессы нагрева, сушки, абсорбции и т.п. Входным
управляющим воздействием указанных ТП является расход того или иного вида топлива,
вещества, сырья или их компонент, которые подаются на объект через регулирующие органы РО (клапаны, заслонки) с помощью исполнительных механизмов ИМ. Для измерения регулируемой переменной используют датчики Д, состоящие из чувствительного (измерительного) элемента и преобразователя измеряемой величины в ток, напряжение и т.п.
Параметры передаточной функции (1) такие, как коэффициент передачи объекта
управления K оу , постоянная времени Tоу и величина транспортного запаздывания τ оу , в
большинстве случаев определяются известными методами идентификации на основе экспериментальных данных [1], величины K им и K дат определяются по паспортным данным
этих устройств.
Вид передаточной функции управляющего устройства УУ определяется алгоритмом
его работы. В современных производственных системах широко используются программные методы управления технологическими объектами с применением развитой сети контроллеров и персональных компьютеров (ПК). В частности, в системах локальной автоматики применение контроллеров для целей стабилизации даёт возможность использовать
алгоритмы управления повышенной сложности. Поэтому далее будет рассматриваться
именно этот вариант построения устройства управления, т.е. цифровое устройство управления (ЦУУ).
1.2. Законы управления
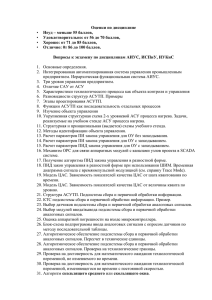
Данные, обрабатываемые цифровым управляющим устройством (рис. 2), предварительно квантуются по времени с шагом T0 и преобразуются в цифровую форму с помощью аналого-цифрового преобразователя (АЦП). Оцифрованные входные данные обрабатываются по запрограммированным в арифметико-логическом устройстве (АЛУ) ЦУУ
алгоритмам, в результате чего формируется цифровой код ui .
Если исполнительный механизм имеет аналоговый вход, то код управления поступает в цифроаналоговый преобразователь (ЦАП), на выходе которого имеется фиксатор – Ф
(экстраполятор нулевого или первого порядка). Поскольку АЛУ, АЦП и ЦАП имеют разрядные сетки ограниченной длины, то все сигналы оказываются квантованными не только
по времени, но и по уровню. Квантование по уровню можно учесть как дополнительную
шумовую погрешность (t).
ЦАП
T0
gi
АЛУ
ui
K
вых
u(t)
+
Ф
ОУ
y.(t )
yi 1
K
+
вх
АЦП
T0
ЦУУ
Рис. 2. Структура замкнутого контура ЦАС
с учетом процедур квантования
На рис. 2, помимо указанных выше обозначений, введены также: K – ключ, отражающий процессы квантования по времени в ЦУУ, gi , ui , yi 1 – цифровые коды задания,
управления и выходной координаты соответственно. Задержка на шаг T0 переменной yi 1
на входе АЛУ связана с конечным временем преобразований в АЦП, ЦАП и вычислений в
АЛУ (см. рис. 2). Этим запаздыванием можно пренебречь, если в передаточной функции
ОУ присутствует существенное транспортное запаздывание оу mT0 , причем m 1 – целое положительное число.
Поскольку вычисление производных и интегралов в цифровых устройствах осу-
ществляется численными методами, то код управления ui на выходе АЛУ (см. рис. 2)
можно представить в виде некоторой решетчатой функции. При этом вычисление первой
производной рекомендуется [4] выполнять с помощью ряда
1
1 2
1 3
(2)
i
i i i ... ,
Т0
2
3
где i i i1 , 2i i 2i 1 i 2 , …
(3)
Если в выражении (2) использовать одно слагаемое, то получим широко распространенную формулу нахождения производной по первой конечной разности:
i
1
i
Т0
i i 1
.
Т0
Однако во время переходных процессов, когда в регулируемой переменной ОУ присутствуют старшие производные, целесообразно брать большее количество слагаемых ряда (2). В частности, в системах управления ТП с медленно изменяющимися переменными
можно брать 2 первых слагаемых ряда (2). Тогда после подстановки (3) в (2) формула вычисления первой производной будет иметь вид
1 3
1
i ( i 2i 1 i 2 ) .
(4)
T0 2
2
Вычисление интеграла в АЛУ обычно выполняется по формулам численного интегрирования либо нулевого порядка (по формуле прямоугольников):
T0
i
Tu
(5)
T0
i 1 ,
Tu
(6)
uинтi uинтi 1
или
uинтi uинтi 1
либо первого порядка (по формуле трапеций):
uинтi uинтi 1
T0 i 1 i .
Tu
2
(7)
Формулы (5) и (6) используются обычно при незначительных изменениях переменных и малом шаге дискретности T0 . Поскольку в переходных процессах, как уже было
сказано, скорости изменения переменных могут быть существенными, то рекомендуется
вычисление интеграла производить с использованием формулы трапеций (7).
С учетом сказанного, алгоритм вычисления кода управляющего воздействия по
наиболее распространенному пропорционально-интегрально-дифференциальному
(ПИД) закону управления можно представить в виде системы приведённых ниже разностных уравнений (8).
Если в этой системе положить равными нулю отдельные параметры настройки, то
можно получить:
пропорциональный (П) закон управления при u1i 0 , u2i 0 , u3i 0 ;
интегральный (И) закон управления при u1i 0 , u2i 0 , u3i 0 ;
пропорционально-интегральный (ПИ) закон управления при u1i 0 , u2i 0 , u3i 0 ;
пропорционально-дифференциальный (ПД) закон управления при u1i 0 , u2i 0 ,
u3i 0 и т.д.
i gi yi 1 ,
u1i K рег i ,
K регT0
u2i u2(i 1)
(i i 1 ),
2Tu
Tдиф 3
1
u3i K рег
( i 2i 1 i 2 ),
T0 2
2
ui u1i u2i u3i при
y0 0, u2(0) 0, 1 0 0.
(8)
где K рег , Tи , Tдиф – параметры настройки, T0 – шаг квантования по времени (шаг дискретности).
В табл. 1 приведены формулы для расчета параметров настройки регуляторов с указанными типами непрерывных законов управления, взятые из источника [1].
Таблица 1
Применяемый
регулятор
П-регулятор
ПИ-регулятор
Предполагаемый переходный процесс
Апериодический c перерегулированием ≈ 20 %
K рег 0 ,3Tоу / K 0 оу
K рег 0,6Tоу / K0оу ; Tи 0,6Tоу
ПИД-регулятор
K рег 0 ,95Tоу / K 0 оу , Tи 2 ,4 оу , Tдиф 0 ,4 оу
В системе разностных уравнений (8) не учитывается квантование по уровню, так как
при достаточной длине разрядной сетки цифровых устройств им можно пренебречь. Дискретность же сигналов по времени приводит к тому, что некоторые коэффициенты зависят
от значения шага дискретности по времени T0. По этой причине при определенных значениях T0 ЦАС может стать неустойчивой.
1.3. Выбор значения шага дискретности по времени
Указанную задачу можно решить несколькими способами: по одному из алгебраических критериев, по частотным критериям устойчивости или в процессе моделирования
замкнутой ЦАС в пакете Simulink for Windows системы MATLAB. Однако в связи с наличием в ОУ транспортного запаздывания решение задачи первыми двумя путями оказывается очень громоздким из-за высокого порядка характеристического уравнения замкнутой
ЦАС.
Поэтому в работе предлагается выбирать необходимый шаг дискретности T0 путем
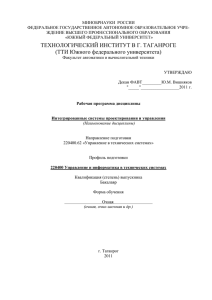
моделирования. В качестве эталона, к которому следует стремиться, выбирая значение T0 ,
рекомендуется использовать процессы в модели непрерывной системы управления заданным объектом, структурная схема которой представлена на рис. 3.
ОУ
УУ
g(t)
.
(t)
Kрег
.
1
Tи p
u(t)
Ko e-pоу
Tоу p+1
y(t)
Tдиф p
Рис. 3. Структурная схема непрерывной
системы управления с аналоговым ПИД-регулятором
2. Задание
1. В соответствии с данными табл. 2 для своего варианта выполнить расчет параметров настройки непрерывного управляющего устройства:
1) Получить в пакете Simulink системы MATLAB графики таких переменных эталонной модели (рис. 3), как сигнал рассогласования (t ), управляющее воздействие u (t ) и
регулируемая переменная y (t ) .
Таблица 2
Объекты управления
ВариЗначение Значение Значение Закон регулирования
ант
ОУ и канал регулирования
Toy , с
oy , с
Ko
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Парогенератор: Расход воды на впрыск –температура
перегретого пара
Теплица: Расход воды на
обогрев – температура воздуха
Теплица: Расход воды на
распыление – влажность
воздуха
Турбина: Положение регулирующего клапана – частота вращения
Смеситель 1: Расход потока
F1 – концентрация выходного потока С0
Смеситель 2: Расход холодной воды – температура
смеси
Генератор переменного
тока:Напряжение на выходе
– ток возбуждения
Сушка: Температура на выходе топки – расход топлива
Сушка: Влажность сухого
жома – расход топлива
Парогенератор: Расход
топлива – давление перегретого пара
1,46
120
20
ПИД
ПИ
20
1000
60
ПИ
ПИД
60
800
20
ПИ
ПИД
4,5
110
17
ПИД
ПИ
1,25
50
5
ПИ
ПИД
4
100
12
ПИ
ПИД
10
0,15
0,03
ПИ
ПИД
20
10
3
40
750
50
2,5
400
120
ПИ
ПИД
ПИД
ПИ
ПИД
ПИ
2) Определить длительность переходного процесса, перерегулирование, а также
ошибки отработки скачка g1 (t ) g 01(t ) и линейного сигнала g 2 (t ) v g 2 t 1(t ) для значений g 0 , v g 2 , взятых из табл. 3. Результаты представить в виде таблицы и графиков.
Примечание. Сигнал g2(t) можно моделировать с помощью последовательного соединения блоков «Step» и «Integrator», установив на первом блоке значение «final», равное
v g 2 , или же блоком «Ramp».
Таблица 3
Значения параметров
Ва- 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
20
риант
8
6
5
3
9
7
2
4
10
1
g0
v g 2 0,25 0,9 0,4 0,2
0,7
0,8
0,5
0,6
0,3
0,1
2. Изменяя параметры настройки ЦУУ в модели, уменьшить перерегулирование до 5
%. Записать полученные значения и сравнить с расчётными. Представить графики (t ) ,
u (t ) и y (t ) . В выводах по этому эксперименту объяснить, как влияет каждый из параметров на длительность переходного процесса, величину перерегулирования и точность
отработки заданных воздействий.
3. Получить дискретную передаточную функцию процедуры вычисления дифференциальной составляющей кода управляющего воздействия с использованием трех
членов ряда (2). При этом необходимо применить следующее свойство Z-преобразования:
Z{ f i m } z m F ( z ) ,
где F ( z ) – Z-преобразование функции f i.
4. Собрать в пакете Simulink системы MATLAB схему модели цифровой автоматической системы.
Для набора модели ЦУУ использовать, помимо известных Вам по лабораторным работам, следующие блоки из раздела Discrete:
«Discrete-Time Integrator» – дискретный интегратор,
«Discrete Transfer Fnc» – дискретная передаточная функция, используемая для набора
модели Z-преобразования разностного уравнения (9),
«Zero-Order Hold» – модель фиксатора нулевого порядка ЦАП,
«Quantizer» – модель АЦП (из раздела Discontinuities).
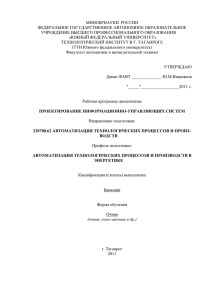
При этом для исследования и сравнения результатов экспериментов можно получить
схемы моделей непрерывной и цифровой систем, показанные на рис. 4.
ANALOG SISTEM
1
Scope1
Display
5
7
Step
70s+1
Transfer Fcn
Gain
1
s
-KGain2
Transport
Delay
Scope
-3.579e-005
Integrator
Display2
Scope4
DIGITAL SISTEM
1
Scope3
Display1
5
7
70s+1
Step1
Gain3
-K-
K Ts
Zero-Order
Hold
Transfer Fcn1
Transport
Delay1
Scope2
z-1
Gain4Discrete-Time
Integrator
Quantizer
Рис. 4. Схемы моделей аналоговых и цифровых систем
На рис. 4 показаны дополнительные блоки «Display», которые рекомендуется ис-
пользовать для регистрации значений измеряемых координат. Значения измеряемых величин на блоках «Display» будут соответствовать времени t, равном времени наблюдения,
которое устанавливается при настройке параметров процесса моделирования.
Примечание. Для настройки модели необходимо:
а) В дискретном интеграторе установить метод интегрирования (Integrator method) –
Trapezoidal.
б) Шаг дискретности, первоначальное значение которого определяется из соотношения T0 0,02 τ oy , необходимо устанавливать во всех блоках ЦУУ в позиции «Sample time».
в) Разрядность в АЦП изменять, меняя величину кванта (цену младшего разряда).
Величину кванта y рассчитывать, исходя из максимального значения координаты y(t), поступающей на вход АЦП, и желаемой величины разрядности N :
y
y Nmax .
2 1
г) Оценку влияния шага дискретности T0 ЦАП на качество процесса регулирования
выполнить, меняя значение «Sample time» только в блоке Zero-Order Hold. В остальных
блоках ЦУУ значение T0 установить равным T0 0,02 τ oy .
д) Для оценки точности различных систем измерять отклонение системы при t = tpn,
где tpn – длительность переходного процесса в непрерывной системе (см. рис. 4).
5. Оценить влияние шага дискретности T0 (чем это отличается от пункта 4.г) на
устойчивость и точность отработки заданных сигналов (табл. 3) замкнутой ЦАС, выбрав
7 его значений в диапазоне (0.02 – 5) oy . Определить критическое значение T0крит , при
котором ЦАС становится неустойчивой. Результаты отразить графиками и сводной таблицей, в которой указать не только величину ошибки, но и длительность переходного
процесса. Эксперимент завершить выводами по его результатам.
6. Выбрав значение T0 0,02 τ oy , проверить влияние метода численного интегрирования, который определяется формулами (5) или (6) на качество процесса управления, для
чего в блоке «Discrete-Time Integrator» установить соответствующий тип метода интегрирования (Integrator method). АЦП можно исключить, полагая величину кванта по уровню
бесконечно малой.
Оценку производить после окончания переходного процесса в увеличенном масштабе. Эксперимент завершить выводами по его результатам.
7. Оценить, как влияет изменение частоты квантования (шага дискретности Т0) ЦАП
на работу ЦАС – её точность и устойчивость. Значение T0 0,02τ oy во всех остальных
блоках ЦУУ. При этом блок АЦП исключить из ЦАС, полагая шаг квантования по уровню
бесконечно малой величиной. Результаты отразить графиками и сводной таблицей. Эксперимент завершить выводами по его результатам.
8. Определить влияние разрядности АЦП (диапазон изменения величины разрядов (2
– 16)) при отработке заданных сигналов (табл. 3), установив значение T0 0,02 τ oy во всех
блоках ЦУУ. Результаты отразить графиками и сводной таблицей. Эксперимент завершить выводами по его результатам.
Результаты представить в виде отчета, который должен содержать:
1. Цель домашнего задания
2. Структурную схему непрерывной системы управления. Расчеты параметров
настройки УУ и графики переменных (t ), u (t ) и y (t ) при скачке и линейном сигнале.
3. Значения параметров непрерывного УУ при переходном процессе с 5 %-ным перерегулированием и графики переменных (t ), u (t ) и y (t ) при скачке и при линейном
сигнале.
4. Вывод о влиянии каждого из параметров настройки закона управления на длительность переходного процесса, величину перерегулирования и точность отработки заданных воздействий.
5. Дискретную передаточную функцию процедуры вычисления дифференциальной
составляющей кода управляющего воздействия по трем слагаемым ряда (2).
6. Результаты оценки влияния шага дискретности T0 на устойчивость замкнутой
ЦАС (структурная схема модели ЦАС, графики и таблицы, выводы).
7. Результаты оценки влияния шага дискретности T0 на точность отработки заданных сигналов (табл. 3) замкнутой ЦАС (графики и таблицы, выводы).
8. Результаты оценки влияния метода численного интегрирования на качество процесса управления (графики и таблицы, выводы).
9. Результаты оценки влияния частоты квантования в ЦАП и величины разрядности
АЦП на работу ЦАС (графики и таблицы, выводы).
Контрольные вопросы
1. В чём состоит особенность цифрового управления?
2. Как получить дискретную передаточную функцию процедур вычисления интеграла по формулам (5) и (6)?
3. Как получить дискретную передаточную функцию процедур вычисления интеграла по формуле трапеций (6)?
4. Как влияет на устойчивость САУ звено транспортного запаздывания? Каковы его
частотные характеристики?
5. Почему при наличии транспортного запаздывания существенно повышается порядок характеристического уравнения ЦАС?
6. Как сказывается на устойчивость и точность САУ величина Т0?
7. Какое влияние на работу ЦАС оказывает число разрядов ЦАП и АЦП?
Литература
Пьявченко Т.А. Конспект лекций по дисциплине “Интегрированные системы проектирования и управления”. Сайт кафедры САУ: http://sau.favt.tsure/ru/forstudent/library
2. Курсовое и дипломное проектирование по автоматизации производственных процессов: Учебное пособие / Под ред. И. К. Петрова. – М.: Высшая школа, 1986.
3. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. –
М.: Наука. Гл. ред. физ.-мат. лит., 1987.
1.
Домашние задание №2
ИССЛЕДОВАНИЕ АЛГОРИТМОВ ПЕРВИЧНОЙ ОБРАБОТКИ
Цель. Изучение алгоритмов первичной обработки и исследование влияния их параметров на статистические характеристики сигналов мониторинга.
Основные сведения. При измерении технологических параметров информация от
датчиков поступает в аппаратуру ввода/вывода в виде унифицированных сигналов (0-10В,
4-20 мА и т.д.), сигналов от термопар, термометров сопротивления, т.е. реальной физической величине соответствует напряжение, сила тока, индуктивность или частота импульсов. В устройствах связи с объектом (УСО) эти сигналы преобразуются в двоичные коды
длиной от 8 до 16 разрядов. Чтобы провести анализ получаемой информации, необходимо
преобразовать коды АЦП в масштаб реальных физических величин: мм, т/час, ата, оС и
т.д. К тому же датчики могут иметь статические ошибки, нелинейные характеристики или
зашумленный выходной сигнал.
Для получения корректных значений результатов мониторинга из двоичных кодов
УСО применяют алгоритмы первичной обработки такие, как нормализация, пересчет в
технические единицы, проверка на достоверность, сглаживание, проверка на технологические границы.
В настоящем домашнем задании предлагается изучить и исследовать такие алгоритмы
первичной обработки, как
- проверка на достоверность,
- сглаживание.
Проверка на достоверность. Благодаря её выполнению, обнаруживаются и устраняются импульсные помехи, выявляется обрыв или короткое замыкание в канале связи и
формируется сообщение о нарушениях оператору-технологу.
В зависимости от того, меняется ли технологическая переменная во времени или остается постоянной, требования по проверке будут отличаться. Если переменная по ходу
технологического процесса изменяется и известна допустимая скорость этого изменения,
то проверку на достоверность осуществляют по условию:
xik xi ( k j )
Tvi
VDi ,
(1)
где i – номер датчика; k – номер отсчета; VDi – допустимая скорость изменения технологической переменной xi; Tvi – временной интервал проверки на достоверность по скорости изменения, связанный со временем опроса датчиков Tопрi соотношением
Tvi jTопрi .
(2)
Величина j не должна быть меньше 3-х (больше может быть, скажем 5; 10), поскольку
заключение о недостоверности сигнала принимается после 3-х кратного нарушения условия (1).
В случае постоянства технологической переменной (этот вариант реализуется в ДЗ)
правая часть (1) должна нести информацию о максимально допустимом значении погрешности измерения. Статистические характеристики шумов в канале измерения обычно оговариваются в ТЗ на разработку системы. В настоящем домашнем задании предлагается в
качестве измерительной погрешности учитывать только погрешность датчика. Если выбран датчик с погрешностью xпaспi, указанной в его паспортных данных, то максимально
допустимое значение погрешности измерения должно быть вычислено как:
xDi xпаспi 3 .
(3)
Выражение (3) следует из нормального закона распределения погрешностей измерения, в соответствии с которым максимальное значение случайного сигнала ymax = 3σy (σy –
среднеквадратическое значение). При этом условие (1) примет вид:
(4)
xik xi ( k j ) x Di .
Проверка сигналов на достоверность заключается в следующем: если условия (1) или
(4) не выполняются, то содержимое счетчика нарушений увеличивается на 1, неверное
значение показаний датчика заменяется последним достоверным, и проверяется следующее показание датчика. При этом необходимо перейти к меньшему шагу опроса датчика:
Tминi Tопрi ( Tминi - новое значение шага опроса датчика после обнаружения первого неправильного отсчета, например, Tм инi
трижды подряд с шагом Tминi
Tопрi
). Процедура проверки повторяется. Если
5
не выполняется неравенство (1) или (4), то по знаку разно-
сти ( xik xi(k j ) ) принимается решение об обрыве или неисправности датчика i-го канала.
Фиксируется время нарушения, его причина и включается резервный канал или резервный
датчик (В ДЗ2 следует просто продолжить проверку с прежним шагом Tопрi ). Новое значение шага Tминi , если позволяет быстродействие используемой в i–м канале аппаратуры,
может быть выбрано на порядок меньше Tопрi . Это позволит к следующему опросу датчика с шагом Tопрi переключиться на резерв, устранив таким образом неисправность.
При проверке на достоверность первые j отсчетов i-го датчика считаются достоверными, что обычно легко выполняется, так как перед запуском системы в эксплуатацию вся
аппаратура налаживается и проверяется (В ДЗ2 для уверенности в достоверности первых
j отсчетов случайную помеху необходимо создавать, начиная с j+1 отсчета).
Сглаживание. Обычно по ходу технологических процессов возникают помехи с частотами, близкими или равными частотам полезного сигнала. Примером такой помехи могут быть погрешности измерения. Устранить их аппаратными фильтрами не удается, но
можно ослабить, и весьма существенно, программным путем, реализуя алгоритм скользящего или экспоненциального сглаживания.
Оценим каждый из них с точки зрения расхода памяти и быстродействия, а также покажем, как следует вычислять параметр сглаживания перед запуском этих программных
модулей.
Под быстродействием будем понимать готовность алгоритма выдать с заданным
уровнем ослабления 1-е значение сглаженного сигнала.
Алгоритм скользящего среднего или скользящего окна имеет вид:
xcik
1
Mi
Mi
x
j 1
(5)
i ( М i k j )
Mi – параметр сглаживания, величина которого определяет количество отсчетов
xij ( j 1,M i ) , взятых для вычисления одного сглаженного значения xcik .
Раскроем формулу (5) для частных значений k, а именно:
1
( xi1 xi 2 ... xi ( M i ) ) ,
Mi
1
xci 2
( xi 2 xi 3 ... xi ( M i 1) ) ,
Mi
1
xci 3
( xi 3 xi 4 ... xi ( M i 2 ) ) и т.д.
Mi
xci1
(6)
(6,а)
(6,б)
Принцип скользящего окна поясняется формулами (6), (6,а), (6,б), из которых следует,
что для вычисления очередного сглаженного значения записанная в Мi ячейках памяти
информация сдвигается влево, и в освободившуюся ячейку заносится новый отсчет датчика. После чего выполняются процедуры суммирования Мi отсчетов и умножения на коэффициент
1
. Из анализа алгоритма (5) ясно, что для его реализации потребуется Mi+2
Mi
ячейки памяти, а время готовности алгоритма выдать с заданной точностью 1-е сглаженное значение составит
tск.ср. M i Tопрi .
(7)
Величина параметра сглаживания M i вычисляется по заданному значению коэффициента ослабления помех i , который, в свою очередь, представляет собой отношение
σ 2x
,
(8)
σ 2xc
где σ x - среднеквадратическое значение помех в отсчетах датчиков xik; σ xc - средне-
i
i
i
квадратическое значение помех в сглаженных, вычисленных в соответствии с алгоритмом
(5) значений xcik.
Чтобы оценить величину Mi, представим каждую из переменных, входящих в выражения (5), (6), как
xik moxi xi k ,
xcik moxi xcik .
(9)
Подставляя (9) в (5) или (6) и вычитая математическое ожидание mox , получим уравнения относительно абсолютных значений погрешностей, которые будут идентичны выражениям (5) или (6), например,
1
xci1
( xi1 xi 2 ... xi ( M i ) ) .
Mi
Предполагая, что значения погрешностей в соседних точках не коррелированны и характеризуются дисперсией σ 2xi можно записать следующее уравнение относительно дисперсии погрешности сглаживания:
1
σ 2xci
(σ 2xi σ 2xi ... σ 2xi )
2
M i
i
Mi
σ 2xi
1
2
Или
σ
( M i σ xi )
.
M i2
Mi
Следовательно, с учетом выражения (8) значение параметра сглаживания для i–го датчика
2
xci
M i ηi .
(10)
Экспоненциальное сглаживание. Его алгоритм имеет вид:
xcik xci ( k 1) α i ( xik xci ( k 1) )
(11)
при начальном значении xci 0 0 и диапазоне изменения параметра сглаживания:
0<i<1.
Следует отметить, что в реальных условиях в результате вывода технологического
процесса или технического объекта в установившийся режим работы становится известным желаемое значение контролируемой или регулируемой переменной, которое ранее
было обозначено как mox . Именно эта величина и может быть использована в качестве
i
начального значения xci 0 .
Величина параметра определяет длительность переходных процессов и качество
сглаживания. Чем меньше , тем лучше сглаживание, но тем большее время потребуется
для получения сглаженного значения xcik с заданным ослаблением помехи ηi .
Поэтому, как и в предыдущем алгоритме сглаживания, возникает задача нахождения
значения параметра сглаживания α i и времени готовности алгоритма (11) вычислить 1-е
сглаженное значение xcik с принятым коэффициентом ослабления помех ηi .
Для определения параметра сглаживания α i перейдем в выражении (11) к дисперсиям
погрешностей измерений, принимая те же допущения, что и для алгоритма (5), тогда
σ 2xci (1 αi ) 2 σ 2xci α i2 σ 2xi .
Откуда
αi
1
,
2 αi
ηi
(12)
αi
или
2
.
ηi 1
(13)
Выражение (13) позволяет рассчитать параметр α i для алгоритма экспоненциального
сглаживания, если задан коэффициент ослабления помех ηi .
Алгоритм (11) можно представить не в рекуррентной форме, а в виде суммы следующего вида:
xcik α i xik 1 α i xi ( k 1) 1 α i 2 xi ( k 2) 1 α i 3 xi ( k 3) ... 1 α i k 1 xi1 .
Считая, что погрешности измерения в каждом отсчете i–го датчика не коррелированны, приходим к аналогичному уравнению относительно дисперсий этих погрешностей,
т.е.
σ 2xci αi2 {[1 (1 αi )2 (1 αi ) 22 (1 αi )23 ... (1 αi ) 2( k 1) ]σ 2xi }.
Выражение в квадратных скобках можно записать как сумму убывающей геометрической
a (1 q k )
прогрессии S k 1
со знаменателем q (1 α i ) 2 .
1 q
Следовательно,
σ 2xci α i2
1 (1 α i ) 2 k 2
1 (1 α i ) 2 k 2
σ
α
σ xi .
x
i
1 (1 α i ) 2 i
2 αi
В результате на основании формул (12) и (14) получаем
1 (1 α i ) 2 k
1
αi
.
2 αi
ηi
(14)
(15)
В выражении (15) член (1 α i ) 2 k с ростом k стремится к нулю, приближаясь к (12). Задаваясь степенью приближения δ, можно вычислить значение k, которое будет определять количество рекуррентных вычислений в алгоритме (11), и, следовательно, время получения первого сглаженного значения при заданном коэффициенте ослабления (8).
На основании сказанного из равенства (1 α i ) 2 k δ находим
ki 0,5
ln δ
,
ln( 1 α i )
(16)
откуда ясно, что первое сглаженное значение будет получено с заданной точностью в соответствии с алгоритмом (11) спустя время
t экс .сгл. ki Tопрi 0,5
ln δ
Tопрi .
ln( 1 α i )
(17)
Как следует из (17), это время будет возрастать с увеличением точности вычислений δ.
Достоинством алгоритма экспоненциального сглаживания, по сравнению со скользящим
окном, является малый объем памяти, хотя он значительно дольше входит в установившийся режим.
Выбор того или иного алгоритма зависит от конкретных требований к быстродействию и объему памяти, сформулированных в ТЗ на разработку системы.
Алгоритмическая и программная части домашнего задания
1. Изучить алгоритмы первичной обработки.
2. Рассчитать значения M, k и α для различных коэффициентов ослабления помех η и
разной величины δ и заполнить таблицу.
Таблица
Расчетные значения M, k и α для различных коэффициентов ослабления помех η и
разной величины δ
η
М
α
k при δ = 0,1
k при δ = 0,01
k при δ = 0,001
2
3
4
5
6
7
8
9
1
3. Составить программные модули выполнения алгоритмов:
a) «Проверка на достоверность» с выводом на экран графиков сигналов, моментов
нарушений и их типов;
b) «Скользящее среднее» с вычислением дисперсий сглаженных и несглаженных
сигналов, значение коэффициента ослабления η получить у преподавателя.
c) «Экспоненциальное сглаживание» с вычислением дисперсий сглаженных и несглаженных сигналов, значение коэффициента ослабления η получить у преподавателя.
Работа на ПК
1. Имитировать сигналы датчика, предназначенного для измерения технологической переменной с постоянным математическим ожиданием. С этой целью необходимо с
помощью стандартной программы выработки псевдослучайных чисел, имеющих нормальное распределение, выработать массив отсчетов датчика размерностью F, равной,
например 500. Математическое ожидание принять равным номеру студенческой группы,
дисперсию шума измерений – равной собственному порядковому номеру в списочном
составе группы. Если собственный порядковый номер больше номера группы, то его
следует для задания дисперсии шума измерений уменьшить на порядок. Амплитуда импульсной помехи, имитирующей случайным образом появляющийся в канале измерения
сигнал короткого замыкания или обрыв, может быть по модулю больше или равна математическому ожиданию.
2. Выполнить программу «Проверка на достоверность». Программа, как отмечалось ранее, при обнаружении помехи должна переходить на более мелкий шаг, заменять
испорченные сигналы последними достоверными и продолжать работу с первоначальным
шагом. В результате работы этого программного модуля импульсные помехи должны
быть устранены. На экран должны быть выведены графики сигналов до и после работы
программы, а также указано время нарушения работы канала измерений и тип этого
нарушения.
3. Выполнить программы «Скользящее среднее» и «Экспоненциальное сглаживание» для заданных значений коэффициента ослабления помех η. Сравнить по коэффициенту η результаты моделирования с расчетными данными таблицы. В качестве входного сигнала использовать выходной сигнал, полученный после работы модуля «Проверка
на достоверность».
4. Сделать выводы по расчетным и экспериментальным данным.
Содержание отчета по домашней работе №2
1. Цель работы и основные алгоритмы, подлежащие исследованию.
Вывод формул и теоретические расчеты.
Тексты программ.
Результаты моделирования на ПК.
Оценка полученных результатов (выводы).
2.
3.
4.
5.
Контрольные вопросы
1. Перечень и назначение алгоритмов первичной обработки информации.
2. Цель проверки сигналов на достоверность.
3. Процедура проверки на достоверность.
4. В чем отличие проверки на достоверность сигналов с “постоянным” математическим ожиданием и изменяющимся во времени.
5. Как выполняется имитация сигналов датчика и канала измерения?
6. Как вычислить дисперсию случайного сигнала?
7. Как будут выглядеть массивы входных и выходных сигналов после работы программы
«Проверка на достоверность»?
8. Назначение алгоритмов сглаживания.
9. Чем отличаются алгоритмы скользящего окна и экспоненциального сглаживания?
10. Как оценить быстродействие (готовность) алгоритмов сглаживания?
11. Сравнительная характеристика 2-х алгоритмов сглаживания по быстродействию и по объему памяти.
12. Что собой представляет коэффициент ослабления помех? Как он вычисляется?
13. Как вычисляются параметры сглаживания для обоих алгоритмов сглаживания?
14. Как получить оценку времени готовности алгоритма экспоненциального сглаживания выдать 1-е сглаженное значение?
Домашнее задание 3
РАЗРАБОТКА ТЕХНИЧЕСКОЙ СТРУКТУРЫ ЦИФРОВОЙ ЛОКАЛЬНОЙ
СИСТЕМЫ УПРАВЛЕНИЯ. ВЫБОР КОМПЛЕКСА ТЕХНИЧЕСКИХ СРЕДСТВ
Выбрать комплекс технических средств и сформировать техническую структуру цифровой локальной системы управления (вариант соответствует порядковому номеру
списочного состава группы).
Исходные данные.
1. Описание объекта управления и его параметры, представленные в таблице 2 домашнего задания ДЗ 1;
2. Выбрать параметры регулятора и значения ε i , ε i 1, ε i 2 , ε i 3 ;
3. диапазон регулирования
Dy ;
4. требуемая точность y тз .
и y тз необходимо взять из описания объекта управления (см. табл.2 домашнего задания ДЗ 1).
Исходные данные свести в таблицу:
Dy
Таблица исходных данных в соответствии с вариантом №___
K o K oy
Toy , с
oy , с
K рег Tи , с
Tд , с
ε i , ε i 1, ε i 2 , ε i 3 D y
y тз
Методика выполнения ДЗ №3
1. Выбрать датчики, необходимые для управления в нормальном режиме работы и контроля по предаварийным ситуациям [2-4].
2. Рассчитать требуемую разрядность АЦП и ЦАП [лекции 2010г.].
2
3. Рассчитать погрешность на входе микроконтроллера вх
[лекции 2010г.].].
4. Оценить допустимую точность вычисления управляющего воздействия, принимая
β α , равным 0.3 [лекции 2010г.].].
5. Задавая дополнительное число разрядов АЛУ микроконтроллера d 4 , рассчитать погрешность округления на шаге T0 [лекции 2010г.].].
6. Оценить величину трансформированной погрешности при вычислении кода управления на шаге T0 , положив коэффициент ослабления помех , равным 1 [лекции
2010г.].].
7. Оценить погрешность метода на шаге T0 [лекции 2010г.].].
8. Сравнить погрешность вычисления кода управления с допустимой, полученной в п.4.
При нарушении условия
u ≤ σuдоп
(1)
определить, какая из погрешностей оказывает наибольшее влияние на результат вычисления:
- погрешность округления: для её уменьшения необходимо увеличить значение d
так, чтобы результат был кратен байту,
- погрешность трансформированная: для её уменьшения следует ввести значение
коэффициента ослабления таким, чтобы условие (1) выполнялось,
- погрешность метода. Если вычисление интеграла было выполнено по формуле
прямоугольников, а для определения производной использовалось одно слагаемое ряда
еk
1
1 2
1 3
еk еk еk ... (ek k ),
Т0
2
3
то для уменьшения этой погрешности необходимо, прежде всего, если позволяет
быстродействие, уменьшить шаг T0 , затем при необходимости перейти к более точным
формулам вычисления интеграла и производной.
Примечание. В любом случае следует перепроверить выполнение условия (1).
9. По результатам расчетов выбрать модули ввода, вывода и микроконтроллер. Составить структурную схему комплекса технических средств для управления и контроля заданным объектом.
10. Проверить выбранные технические средства по быстродействию, т.е. по обеспечению
условия
(2)
Tвыч Tпреоб TАПД T0 .
В условие (2) введены следующие компоненты:
Tвыч - время вычислений в микроконтроллере, для заданных алгоритмов оно пренебрежимо мало,
Tпреоб - время преобразований аналоговых сигналов в цифровой код,
TАПД - время, затрачиваемое аппаратурой передачи данных на передачу информации
от объекта управления к контроллеру и обратно.
Содержание отчета по ДЗ 3
1. Постановка задачи.
2. Критерий выбора КТС.
3. Формулы и расчеты основных параметров КТС и погрешностей вычислений.
4. Перечень выбранных КТС с их техническими характеристиками.
5. Структурная схема управляющего устройства.
6. Выводы и замечания.
Контрольные вопросы
1. Какова техническая структура управляющего устройства?
2. Каковы критерии выбора комплекса технических средств (КТС) должны быть заложены при проектировании АСУТП?
3. Как выбрать датчик? Какие исходные данные должны учитываться при его выборе?
4. Как рассчитать величину разрядности модуля ввода/вывода?
5. Назовите погрешности, возникающие при вычислениях в контроллере? Как оценить каждую из них?
6. Какова должна быть разрядность контроллера?
7. Как проверить обеспечение требуемого быстродействия разработанным управляющим устройством?
7. Учебно-методическое и информационное обеспечение дисциплины (модуля)
а) основная литература:
1. Схиртладзе А.Г. Интегрированные системы проектирования и управления: учебник
для студ. высш. учеб. заведений / А.Г. Схиртладзе, Т.Я. Лазарева, Ю.Ф. Мартемьянов. –
М.: Издательский центр «Академия», 2010. – 352 с.
2. Пьявченко Т.А. Практикум по автоматизированным информационно-управляющим
комплексам и системам. Учебное пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2009. – 88 с.
3. Пьявченко Т.А. Проектирование АСУТП в SCADA-системе TRACE MODE. Учебное пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2007. –262 с.
4. Пьявченко Т.А., Финаев В.И. Автоматизированные информационно-управляющие
системы: Учебное пособие. – Таганрог: ТРТУ, 2006. 268с.
б) дополнительная литература:
5. Пьявченко Т.А. Автоматизированные системы управления технологическими процессами и техническими объектами: Учебное пособие. Таганрог; ТРТУ.1997. 128с.
6. Плетнев Г.П. Автоматизированные системы управления объектами тепловых электростанций: Учебник для вузов. – М.: Изд-во МЭИ, 1981; 2-е изд., перераб. и доп. 1995.
352 с.
7. Деменков Н.П. SCADA-системы как инструмент проектирования АСУ ТП. Учебное пособие. М.: Изд-во МГТУ им. Н.Э. Баумана. 2001г. 326 с.
8. Приборы и системы. Управление, контроль, диагностика. Ежемесячный научнотехнический и производственный журнал.
9. Приборостроение и средства автоматизации. Энциклопедический справочник. Ежемесячный журнал.
10. Современные технологии автоматизации. Ежеквартальный журнал.
в) программное обеспечение и Интернет-ресурсы
1. Пьявченко Т.А. Проектирование АСУТП на базе SCADA системы TRACE MODE
на учебном тренажерном стенде. http://sau.favt.tsure/ru/forstudent/library
2. Исполнительная SoftLogic система MasterSCADA для программирования контроллеров. http://www.masterscada.ru, http://www.insat.ru
3. TRACE MODE 6 SOFTLOGIC: программирование контроллеров.
http://www.adastra.ru.
4. Научно-исследовательская лаборатория автоматизации производства (НИЛ АП). г.
Таганрог. http://www.rlda.ru.
Вопросы для контроля самостоятельной работы, обучающегося по отдельным
разделам дисциплины “Интегрированные системы проектирования и управления”.
Контрольные вопросы по идентификации объекта управления
1. Какие методы идентификации по разгонной характеристике Вам известны? Их краткая характеристика. В чем отличие ОУ1 и ОУ2 от ОУ3? Какова размерность параметров моделей объектов управления.
2. Какие модули промышленной автоматики применяются в учебном лабораторном
стенде? Каковы их назначение и характеристики?
3. Какова мощность используемых нагревателей?
4. Назначение OPC-сервера, процедуры его создания. Назначение программной системы NLopc. Как открыть её главное окно? Как создать образы устройств, подключенных к COM порту? Назначение конструктора пространства имен. Разновидности тегов и процедуры их создания.
5. Особенности создания тренда и его характеристик. Организация кнопки «Пуск».
6. Как осуществить автопостроение каналов АРМ?
7. Как представить каналы «Температура» и «Пуск» в виде «источник/приемник»?
8. Как выполнить привязку тегов проекта к тегам устройства ввода-вывода в программе NLорс?
Пьявченко Т.А. Практикум по автоматизированным информационно-управляющим
комплексам и системам: Учебное пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2009. – 88 с.
Контрольные вопросы к разработке проекта АСУ процесса нагрева на базе
учебного стенда
1. Объясните переход от аналогового алгоритма ПИД-регулятора к дискретному.
2. Охарактеризуйте процедуру создания экрана «от шаблона».
3. Как для «АРМ диспетчера» назначаются необходимые аргументы, задаются их имена, тип данных, значения по умолчанию, привязки, флаги?
4. Каким аргументам назначается тип IN, а каким OUT или IN\OUT?
5. Как на экране разместить ГЭ «Тренд» и задать кривым цвет, толщину линий, интервалы выводимых значений?
6. Назначение широтно-импульсного модулятора.
7. Каковы особенности создания компонентов источников/приемников для обмена по
протоколу OPC?
8. Как выполняются привязки аппаратных средств ввода/вывода к каналам?
9. Как осуществляется назначение передачи информации между каналами?
10. Чем отличаются обозначения канала, к которому привязывается какой-либо канал
от канала, с которого осуществляется привязка?
11. Почему созданная АСУТП может быть отнесена к 2-уровневой?
Пьявченко Т.А. Расчет параметров ПИД-закона управления для объектов с транспортным запаздыванием. Известия ТРТУ. Тематический выпуск//Материалы Всероссийской научно-технической
конференции с международным участием “Компьютерные и информационные технологии в науке,
инженерии и управлении”. – Таганрог: Изд-во ТРТУ, 2006, №5(60). – C. 83 – 88.
Контрольные вопросы к разработке проекта АСУ процесса нагрева на базе
персонального компьютера и SCADA-системы TRACE MODE
1. Назначение OPC-сервера, процедуры его создания.
2. Назначение программной системы NLopc. Как открыть её главное окно?
3. Назначение сервера NLopc. Как создать образы устройств, подключенных к COM порту?
4. Назначение конструктора пространства имен. Разновидности тегов и процедуры их
создания.
5. Какие компоненты входят в древовидную структуру проекта в SCADA-системе Trace
Mode? Их назначение.
6. Как создается экран по принципу «от шаблона»?
7. Особенности создания тренда и его характеристик: цвет линий, название, диапазон изменения параметров.
8. Какой компонент из структуры проекта в SCADA-системе следует вызвать для создания АРМ?
9. Как осуществить автопостроение каналов АРМ?
10. Создание статических и динамических форм отображения для ввода задания и параметров регулятора.
11. Как представить каналы «Температура» и «Управление» в виде «источник/приемник»?
12. Как выполнить привязку тегов проекта к тегам устройства ввода-вывода в программе
NLорс?
13. Как организовать взаимодействие компонентов проекта в SCADA-системе?
14. Как создать шаблон FBD–программы?
15. Как проверить правильность созданной FBD–программы?
http://www.adastra.ru.
Пьявченко Т.А. Практикум по автоматизированным информационно-управляющим комплексам и
системам. Учебное пособие. – Таганрог: Изд-во ТТИ ЮФУ, 2009. – 88 с.
Контрольные вопросы по организации архивирования и отчета тревог, по созданию мнемосхемы проекта АСУТП в SCADA-системе TRACE MODE 6
1. Как задаются параметры архивов?
2. Как формируются сообщения в отчет тревог?
3. Как указываются направления посылки сообщения?
4. Назначение редактора представления данных. Его основные компоненты.
5. Как задать настройки узла АРМ?
6. Для чего служат панели статических и динамических элементов?
7. Как установить реальное время и дату?
8. Как задаются привязки и атрибуты при отображении на мнемосхеме отдельных
элементов технологического процесса?
9. Какую функцию выполняют дополнительно созданные FBD-программы?
10. Как организовать непрерывное регулирование температуры?
11. Какие атрибуты должны быть у кнопок параметров регулятора и объекта, чтобы
оператор мог изменять их значения с клавиатуры?
12. Как создать тренд графиков изменения технологических переменных?
13. Как поместить на экран отчет тревог и просмотреть его в реальном времени?
14. Как осуществить связь между ПК, на которых установлены узлы MicroRTM и
RTM?
15. Можно ли создать графику в узле MicroRTM?
8. Материально-техническое обеспечение дисциплины (модуля)
Для чтения лекций используется мультимедийное оборудование.
Практические занятия проходят в лаборатории с установленными пятью реальными объектами (ОУ) для управления процессом нагрева с одновременным контролем
влажности. Параметры ОУ могут изменяться внесением дополнительных предметов и
влажной губки в замкнутый объем. В качестве датчиков, модулей ввода/вывода, преобразователя интерфейсов используется аппаратура, разработанная в НИЛ АП.
http://www.rlda.ru
Рабочая программа составлена в соответствии с требованиями ФГОС ВПО с учетом
рекомендаций и ПрООП ВПО по направлению подготовки 230100.62 «Информатика и вычислительная техника»
по профилю «Автоматизированные информационноуправляющие системы и комплексы».
Автор
К.т.н., доцент, профессор кафедры САУ
Зав. кафедрой САУ
_____________
_____________________
Т.А. Пьявченко
В.И. Финаев
Программа одобрена на заседании УМК ФАВТ от 20.01.2011 года, протокол № 1.