Разработка и исследование автоматических систем
реклама

Министерство образования и науки Российской Федерации
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«Московский физико-технический институт (государственный университет)»
Факультет радиотехники и кибернетики
Кафедра инфокоммуникационных систем и сетей
На правах рукописи
УДК 608.2
Иванов Роман Евгеньевич
Разработка и исследование автоматических систем
регистрации нарушений ППД с использованием
RFID-технологии и широкополосных беспроводных
средств.
Выпускная квалификационная работа бакалавра
Направление подготовки: 010900 Прикладные математика и физика
Заведующий кафедрой
__________________
/ _Н.А. Кузнецов_ /
Научный руководитель
__________________
/ В. М. Вишневский /
Студент
__________________
/ Р. Е. Иванов /
г. Москва
2013
Оглавление
1
Введение .................................................................................................................................3
1.1
Недостатки существующих систем фиксации нарушений ПДД ..................................3
1.2 Краткое описание RFID-технологии и возможности ее использования для
фиксации нарушений ППД ........................................................................................................4
1.3 Принципы построения автоматизированной системы и основного модуля
идентификации нарушений ППД ..............................................................................................7
2
Постановка проблемы .........................................................................................................12
3
Анализ существующих решений .........................................................................................13
4
3.1
Введение ........................................................................................................................14
3.2
Венгерский алгоритм ....................................................................................................14
3.3
Применение венгерского алгоритма к проблеме сопоставления номерных знаков
17
Алгоритм сопоставления автомобильных государственных номеров ...........................19
4.1
Входные параметры......................................................................................................19
4.2
Сопоставление массивов ..............................................................................................21
4.2.1
Общая схема работы алгоритма ..........................................................................21
4.2.2
Генерация временного окна .................................................................................22
4.2.3
Функции эквивалентности ....................................................................................24
4.2.4
Проверка результата .............................................................................................24
4.3
5
Итог работы алгоритма .................................................................................................26
Моделирование....................................................................................................................26
5.1
Алгоритм моделирования окружающей среды .........................................................27
5.2
Генерация потоков номеров ........................................................................................27
5.2.1
Генерация номера .................................................................................................27
6
Заключение ...........................................................................................................................30
7
Список литературы ...............................................................................................................31
2
1 Введение
1.1 Недостатки существующих систем фиксации нарушений
ПДД
Во многих странах мира, в том числе и в России, одним из наиболее действенных
путей решения проблемы аварийности на автодорогах является создание систем
автоматической фиксации нарушений правил дорожного движения (ПДД). В мировой
практике для автоматизированного контроля правонарушений на автодорогах широко
используется аппаратура видеофиксации, включающая радарное устройство для
измерения скорости движения транспортного средства (ТС) и оптическую фотокамеру для
фиксации номерного знака (идентификации) ТС.
Однако указанная аппаратура имеет ряд существенных недостатков, которые
затрудняют, а порой делают невозможной идентификацию автомобиля – нарушителя
ПДД. К числу основных относятся:
o
отсутствие возможности распознавания сильно загрязненных государственных
регистрационных знаков (ГРЗ) в плохих погодных условиях (туман, дождь, снег)
или намеренно загрязненных номерных знаков;
o
отсутствие оперативной передачи информации в центр управления и контроля,
что лишает возможности реагирования на правонарушения в реальном масштабе
времени.
Из-за указанных недостатков вероятность обнаружения автомобиля, нарушившего
скоростной режим, составляет менее 50%. Ниже приводится описание разработки
автоматизированной системы контроля безопасности на автодорогах с использованием
RFID-технологии и широкополосных беспроводных средств, обеспечивающих
значительное повышение вероятности обнаружения нарушителя ПДД. Повышение
качества идентификации ТС на автодорогах достигается за счет применения метода
радиочастотной идентификации, обладающего целым рядом существенных преимуществ
относительно других известных методов бесконтактной идентификации автомобилей:
3
o активные радиометки, расположенные на номерном знаке автомобиля читаются
через грязь, воду, туман, пластмассу и т.д.;
o радиометки несут большое количество информации о ТС, допуская не только
чтение, но и возможность записи/перезаписи информации;
o практическая невозможность подделки и разрушения информации за счет
использования различных систем шифрации радиометки;
o возможность считывания информации ридером на большом расстоянии (до 50м)
от активной метки, расположенной на ГРЗ автомобиля.
Для устранения второго недостатка существующих систем видеофиксации
предлагается использовать методологию построения высокоскоростной беспроводной
связи вдоль автодорог для передачи информации от систем фиксации нарушений ПДД в
центр управления и контроля в реальном масштабе времени. Таким образом, будет
обеспечена не только высокоскоростная связь с разрабатываемой новой стационарной и
подвижной аппаратурой идентификации нарушений ПДД, но и с патрульными машинами
и постами ГИБДД вдоль всей трассы.
Несмотря на широкое развитие и применение систем видеофиксации [1],
широкополосной беспроводной связи [2] и RFID-технологий [3], в настоящее время в мире
отсутствуют автоматизированные системы, предлагаемые ниже. Новизна и
оригинальность разрабатываемой системы подтверждена проведенным патентным
поиском и получением патента № 99207 от 10 ноября 2010 г. «Автоматизированная
система контроля нарушений ПДД на базе широкополосных беспроводных сетей
передачи информации и RFID-технологий» [4].
1.2 Краткое описание RFID-технологии и возможности ее
использования для фиксации нарушений ППД
Термин радиочастотная идентификация (от английского Radio Frequency
IDentification, сокращенно RFID) используется с 60-х годов прошлого века. Однако лишь в
последнее десятилетие радиочастотная идентификация получила широкое
распространение и является одним из наиболее интенсивно развивающихся направлений
в области автоматической идентификации объектов и беспроводной связи.
Радиочастотная идентификация позволяет осуществлять автоматическую
идентификацию объекта в реальном времени, автоматизировать процесс сбора и
4
обработки информации бесконтактным способом, а также вести временной учет событий
с участием данного объекта. Области применения RFID-технологии обширны:
идентификация, слежение, сортировка и обнаружение неограниченного количества
предметов, включая документы, транспортные средства, одежду, контейнеры и т.д.
Кроме того, она может быть использована для автоматизации производственных
процессов и систем управления, организации систем контроля доступа и систем
безопасности, контроля и учёта рабочего времени, построения дисконтных и
логистических систем, защиты товаров и документов от подделок.
Использование технологии радиочастотной идентификации предполагает наличие
трех основных компонентов:
o радиометка или RFID-метка (она же транспондер, иногда также применяется
термин RFID-тег, или RFID-tag) - средство маркировки отслеживаемого объекта;
o устройство чтения и записи таких радиометок (считыватель, ридер, reader или
интеррогатор);
o серверное программное обеспечение, которое расшифровывает полученную со
считывателей информацию о радиометках и представляет ее в формате,
подходящем для систем управления, образующих информационную
инфраструктуру.
Принцип работы системы радиочастотной идентификации состоит в следующем:
антенна считывателя излучает электромагнитные волны, которые принимает антенна
радиометки. За счет энергии этих волн осуществляется питание чипа, встроенного в метку.
В результате этого метка активизируется, вступает в радиообмен для самоидентификации
и передает информацию считывающему устройству или производит запись информации
полученной от считывателя в свою память. Основные компоненты метки: интегральная
схема (чип), управляющая связью со считывателем, и антенна. Чип имеет память, которая
хранит идентификационный код или другие данные. RFID-метка размещается на объекте
идентификации и является источником информации о данном объекте. Метка может
содержать данные о типе объекта, стоимости, весе, температуре, данные логистики, а
также любой другой информации об объекте. Учитывая отсутствие потребности в
контакте или прямой видимости между считывателем и меткой, а также то, что
радиосигнал легко проникает через многие материалы, метки могут быть скрыты внутри
тех объектов, которые подлежат идентификации.
5
RFID-метки обладают возможностью многократной записи и считывания
информации, а также хранения большого объема информации (до 10000 байт). При
условии нахождения метки в зоне считывателя, скорость считывания достигает более
1000 меток в секунду с достоверной точностью до 100%. При этом в зависимости от
модели метки и считывателя, радиус считывания может составлять до нескольких сотен
метров. В настоящее время промышленно выпускаются пассивные метки для работы на
небольших расстояниях от считывателя и активные метки, обеспечивающие дальность
считывания свыше 100м.
Активные метки, обладая собственным источником питания (время жизни батареи
питания от 3 до 10 лет), могут генерировать выходной сигнал большего уровня, чем
пассивные, позволяя применять их в более агрессивных для радиочастотного сигнала
средах: воде, металлах, для больших расстояний на воздухе.
Возможность работы на значительных расстояниях, большая емкость памяти для
записи/считывания информации о транспортном средстве и его владельце (~550 Мбайт),
возможность установки на движущемся со скоростью 120-150 км/час транспортном
средстве и т.д. предопределили целесообразность использования активных меток в
автоматизированной системе контроля нарушений ПДД.
Активная RFID-метка может размещаться в различных местах установки на
транспортном средстве: на номерном знаке; на решетке радиатора, на ветровом стекле; в
корпусе зеркала заднего вида и бокового зеркала. Наиболее рациональным и
перспективным вариантом является установка RFID-метки на номерном знаке. Это
связано с тем, что такое решение может быть тиражировано в промышленном масштабе,
а также тем, что существующие системы видеоконтроля уже «нацелены» на фиксацию и
считывание зоны, где расположен номерной знак.
6
Рис.1. Зоны размещения RFID-метки на ГРЗ
На Рис.1 представлены габаритные размеры государственного регистрационного
знака и возможные зоны размещения RFID-метки, работающей в частотном диапазоне
433 или 860-930 МГц, на его поверхности. Представленные размеры четырех зон A, В, С и
D полностью вписываются в габаритные размеры номерного знака и не могут повлиять на
его визуальную идентификацию (читаемость знака).
При размещении на номерном знаке необходимо использовать RFID-метку для
металлических поверхностей (onMetal). Крепление RFID-метки к номерному знаку может
быть выполнено с помощью заклепок, винтов или клея.
На стадии внедрения такой технологии данная процедура выполняется
сотрудниками ГИБДД. В дальнейшем, при массовом использовании технологии RFID на
автомобильном транспорте, установка метки на ГРЗ может выполняться в промышленном
масштабе.
После установки RFID метки на ГРЗ сотрудники ГИБДД осуществляют процесс
программирования и записи информации на нее с помощью считывателя. Весь объем
записанной информации, а также идентификатор метки заносятся в базу данных ГИБДД,
после чего ГРЗ с меткой выдается владельцу транспортного средства для крепления на
автомобиль.
Преимуществом такого размещения является то, что номерной знак совмещен с
RFID меткой и представляет единое изделие.
1.3 Принципы построения автоматизированной системы и
основного модуля идентификации нарушений ППД
Радиочастотная идентификация, как и видеофиксация, по сути являются
автономными системами. Они могут работать вне зависимости друг от друга. Однако
комбинированное использование этих систем позволит уменьшить вероятность ошибок,
повысить достоверность информации и оперативно реагировать структурам ГИБДД на
правонарушения.
Полученная информация от системы видеофиксации и параллельно от системы
радиочастотной идентификации оперативно передается в Центр Управления и заносится
7
в базу данных (БД) ГИБДД. Ввиду функционирования этих систем в режиме реального
времени, возможен сравнительный анализ данных по одному и тому же транспортному
средству. В условиях плохой погоды и слабой читаемости номерного знака (на фото
видны только несколько символов) вступает в действие программная реализация
алгоритма выборки и сравнения наиболее вероятных совпадений данных видеофиксации
и радиочастотной идентификации (по времени фиксации, известным символам ГРЗ).
Кроме того, возможно осуществить сравнительный анализ полученных данных по цвету
кузова транспортного средства, его типу, марки или модели автомобиля.
Общая схема функционирования автоматизированной системы безопасности на
автодорогах может быть представлена на схеме рис.2:
Рис.2. Общая схема функционирования автоматизированной системы безопасности
На данной схеме представлены два типа модулей идентификации, установленные
на автомобильной трассе. Это модуль идентификации стационарного типа (СТ) и
мобильный (МОБ). Данные модули осуществляют фотофиксацию транспортных средств,
измерение их скорости, распознавание ГРЗ, радиочастотную идентификацию меток ТС, а
также запись и оперативное хранение полученной информации. Кроме того, модули
идентификации имеют в своем составе радиомаршрутизатор для настройки, управления
и передачи информации на мобильный или стационарный пост.
8
Вся информация от этих модулей по каналам связи передается на сервер
идентификации, расположенный в структурном подразделении УГИБДД, который
осуществляет сбор и обработку информации от всех модулей идентификации данного
подразделения. Удаленный доступ к серверу имеют инспекторы ГИБДД в целях
осуществления проверки данных по транспортному средству и его владельцу, а также для
принятия процессуального решения. Кроме того сервер идентификации осуществляет
автоматический обмен данными с модулем интеграции, который осуществляет
преобразование формата всех полученных данных. В свою очередь модуль интеграции
осуществляет автоматический обмен данными с сервером регионального УГИБДД, в
памяти которого находятся базы данных владельцев ТС, базы розыска ТС, базы
административных нарушений. Данный сервер также осуществляет учет оформленных
нарушений и учет оплаты по квитанциям.
Инспекторы ГИБДД направляют владельцу ТС (нарушителю ПДД) через ФГУП
«Почта России» почтовое отправление с квитанцией об оплате штрафа. Владелец ТС
производит оплату штрафа по данной квитанции в любом отделении банка. Информация
об оплате передается из банка в Федеральное Казначейство. По существующим каналам
связи сервер регионального УГИБДД получает оперативную информацию из
Федерального Казначейства о подтверждении оплаты штрафа нарушителем ПДД.
На Рис.3. представлена схема работы стационарного модуля идентификации на
участке автомобильной дороги:
Рис.3. Схема работы стационарного модуля идентификации
На данной схеме представлены два модуля идентификации (2), которые
осуществляют работу в двух направлениях движения автотранспорта. Питание модулей
9
осуществляется от источника электропитания 220В переменного тока (1). Оба модуля
подключены к концентратору (3), который по каналам связи осуществляет передачу
информации на центральный пост ГИБДД, где расположен сервер баз данных (4) и
рабочее место оператора (5).
На Рис.4 представлена схема работы мобильного модуля идентификации на
участке автомобильной дороги:
Рис.4. Схема работы мобильного модуля идентификации
На данной схеме оперативная информация о транспортных средствах с
мобильного модуля идентификации в реальном времени передается по беспроводным
каналам связи. При этом данная информация по клиентским каналам связи доступна
мобильному посту, а по магистральному каналу связи – центральному посту.
Оборудование беспроводной точки доступа располагается на вышке опорной сети
передачи информации.
В состав модуля идентификации входят четыре основных узла, которые
осуществляют контроль над объектом идентификации и передачу полученной
информации: радарный датчик, видеокамера, считыватель RFID меток и
радиомаршрутизатор. Управление всеми узлами модуля идентификации осуществляется
микропроцессором по трем шинам: управляющей, адресной и шине данных.
В качестве дополнительных узлов используются: внутренняя память (ROM и RAM),
порты ввода-вывода, сетевой адаптер LAN, параллельные порты COM, дополнительные
слоты расширения. Электропитание всех узлов модуля идентификации осуществляется от
внутреннего блока питания.
10
Архитектура основного аппаратного модуля идентификации представлена на рис.5:
Микропроцессор
Арифметикологическое
устройство
Регистры
Кэш-память
Радарный
датчик
Схемы
управ
ления
шиной
Схемы
внутреннего
управления
Видеокамера
Считыватель
RFID-меток
Радио
маршрутизатор
Шины: управляющая, адресная и шина данных
Внутренняя
память
ROM
Порты
вводавывода
Сетевой
адаптер
Параллельные
коммутационные
порты
RAM
Блок
питания
Дополни
тельные
слоты
расшире
ния
Рис.5. Архитектура основного аппаратного модуля идентификации
Радарный датчик модуля идентификации должен включать в свой состав блок
радиолокационного измерителя скорости и дальности объектов контроля, а также
внешнюю плоскую антенну диапазона 2,4 ГГц. Данный узел построен по классической
импульсной схеме передачи сигналов с последующим цифровым накоплением и
обработкой всех принятых отраженных импульсов. Далее производится экстраполяция
полученных данных и формируется матрица координат целей, которая передается в
микропроцессор.
Видеокамера модуля идентификации должна включать в свой состав
высокочувствительную телекамеру и инфракрасный прожектор для подсветки в темное
время суток. Информация от видеокамеры (видеопоток) передается в микропроцессор
для распознавания ГРЗ транспортного средства на программном уровне видеоаналитики.
Кроме того, на основе этой информации микропроцессор осуществляет оценку
«пиксельной» скорости транспортных средств, производит трассировку движения
автомобиля, а затем производит сравнение вычисленных данных с информацией,
полученной от радарного датчика. Благодаря этой операции производится «отсеивание»
случайных радарных данных, осуществляется различие объектов, движущихся на одной
дальности, но с разными скоростями.
11
Как только объект, находящийся в пределах рабочего диапазона радара,
превышает пороговую скорость, он автоматически заносится в список объектов «на
сопровождение». При этом формируется кадр «Захват объекта» и, при достижении
установленной дальности, микропроцессор вырабатывает команду «Захвата кадра». При
этом осуществляется обнаружение и распознавание ГРЗ транспортного средства.
Считыватель RFID меток модуля идентификации включает в свой состав
непосредственно ридер меток и антенное устройство. При поступлении команды «Захват
кадра» от микропроцессора производится запуск процедуры считывания RFID меток,
находящихся в зоне действия считывателя.
На основе полученных данных от радарного датчика, видеокамеры и считывателя
RFID меток окончательно формируется кадр изображения объекта, на котором
присутствует следующая информация:
o отчетливо видимый ГРЗ на реальном фото;
o дата и время события;
o скорость ТС;
o автоматически распознанный ГРЗ;
o номер модуля идентификации.
Радиомаршрутизатор осуществляет передачу данного кадра по клиентским и
магистральным радиоканалам опорной сети передачи информации в оперативный Центр
Управления УГИБДД. Кроме того, осуществляется передача всего потока видеокадров, а
также информация обо всех радиометках в зоне действия модуля идентификации, для
возможности их просмотра, сравнения и архивирования в базу данных оператором в
режиме реального времени.
2 Постановка проблемы
В настоящей работе решается одна из основных задач, возникающих при
проектировании подобных систем – решение проблемы распознавания и сравнительного
анализа номерных знаков, полученных из фотоустройства и при считывании RFID-метки.
Решение этой задачи обеспечивает распознавание номерных знаков ТС в любых
погодных условиях, а также в случае намеренного загрязнения номеров и,
12
соответственно, обеспечивает повышение вероятности обнаружения нарушения ПДД до
90%.
Попытка решения описанной выше задачи позволяет сформулировать более
конкретную задачу – задачу сопоставления потока номеров, полученного с выхода
камеры с потоком номеров, полученных с выхода RFID-считывателя. К сожалению,
расстояние, на котором производится фотография (~50-100м), значительно превышает
дальность считывания пассивных RFID-меток (~10м). Из-за этого моменты времени
фиксации автомобильного номера камерой и RFID-считывателем отличаются, и, как
следствие, может появиться различие в порядке регистрации номерных знаков, т.к. ТС
движутся с различными скоростями. В результате, появляется два различных потока
номеров, и становиться не понятно какой номер с потока камеры соответствует какому
номеру из потока RFID-считывателя. Возникает необходимость привязки номера с RFIDсчитывателя и номером с камеры.
RFID
CAMERA
Рис. 6. Области считывания камерой и RFID-считывателем
3 Анализ существующих решений
Номерные знаки двух потоков можно представить как вершины графа, а ребра
символизируют возможные пары номер из потока RFID – номер из потока камеры. Такой
граф является двупольным, т.к. не может номер из одного потока соответствовать номеру
из того же самого потока, таким образом не существует ребер, соединяющие вершины
соответствующие одному потоку. Для того, чтобы отразить тот факт, что одни номерные
знаки больше подходят в пары, чем другие, можно ввести весовую функцию. Таким
образом, граф текущей задачи является взвешенным. При этом для данной проблемы
13
наиболее подходит задача о взвешенных паросочетаниях. Ее формулировка и решение
приводятся ниже.
3.1 Введение
Подмножество 𝑀 ребер графа 𝐺 = (𝑉, 𝐸) называется паросочетанием, если
никакие два ребра из 𝑀 не имеют общей вершины. На основе этого определения можно
сформировать задачу о паросочетании, заключающаяся в нахождении в данном графе 𝐺
максимального паросочетания. Если мощность паросочетания |𝑀| = |𝑉|/2,
наибольшему возможному в графе с |𝑉| вершинами, то такое паросочетание называется
совершенным, или полным.
Но нас будет интересовать только задача о взвешенных паросочетаниях:
ЗАДАЧА. Дан полный двудольный граф 𝐵 = (𝑉, 𝑈, 𝐸) c 2𝑛 вершинами, причем
|𝑉| = |𝑈| = 𝑛; стоимость каждого ребра 𝑐(𝜐𝑖 , 𝑢𝑗 ) ≥ 0 . Требуется найти совершенное,
или полное, паросочетание c наименьшей стоимостью.
С решением данной задачи справляется венгерский алгоритм.
3.2 Венгерский алгоритм
Рассмотрим принцип действия алгоритма применительно к текущей задачи, т.е. в
случае двудольного графа.
DEF. Будем называть функцию 𝑦 ∶ (𝑉 ∪ 𝑈) → ℝ потенциалом, если 𝑦(𝑖) +
𝑦(𝑗) ≤ 𝑐(𝜐𝑖 , 𝑢𝑗 ) ∀ 𝜐𝑖 ∈ 𝑉, 𝑢𝑖 ∈ 𝑈. Значение потенциала 𝑦 равно ∑𝜐∈𝑉∪𝑈 𝑦(𝜐).
Нетрудно заметить, что стоимость любого совершенного паросочетания не меньше,
чем значение любого потенциала. Венгерский метод находит полное паросочетание и
потенциал с одинаковым значением, что доказывает минимальную стоимость первого.
Фактически он находит совершенное паросочетание жёстких рёбер: ребро (𝜐𝑖 , 𝑢𝑗 )
называется жёстким для потенциала y, если 𝑦(𝜐𝑖 ) + 𝑦(𝑢𝑗 ) = 𝑐(𝜐𝑖 , 𝑢𝑗 ). Подграф
жёстких рёбер будем обозначать как 𝐺𝑦 . Стоимость полного паросочетания в 𝐺𝑦 (если
оно существует) равна значению 𝑦.
14
Алгоритм хранит в памяти потенциал 𝑦 и ориентацию каждого жёсткого ребра,
обладающую тем свойством, что рёбра, направленные от 𝑈к 𝑉 образуют
паросочетание 𝑀. 𝐺⃗𝑦 - ориентированный граф, состоящий из жёстких рёбер с заданной
ориентацией. Таким образом, в любой момент есть три типа рёбер:
o
нежёсткие (и не принадлежащие 𝑀);
o
жёсткие, но не принадлежащие 𝑀;
o
жёсткие и принадлежащие 𝑀.
Изначально 𝑦 везде равно 0, и все рёбра направлены от 𝑉 к 𝑈 (таким
образом, 𝑀 пусто). На каждом шаге или модифицируется 𝑦 так, что увеличивается
множество вершин 𝑍, определенное далее, или изменяется ориентация, чтобы получить
паросочетание с большим количеством рёбер; всегда остаётся верным, что все рёбра
из 𝑀 являются жёсткими. Процесс заканчивается, если 𝑀 — совершенное паросочетание.
Пусть на каждом шаге 𝑅𝑉 ⊆ 𝑉 и 𝑅𝑈 ⊆ 𝑈 составляют множество вершин, не
инцидентных рёбрам из 𝑀. Обозначим через 𝑍 множество вершин, достижимых
из 𝑅𝑉 в 𝐺⃗𝑦 (оно может быть найдено поиском в ширину). Если 𝑅𝑈 ∩ 𝑍 не является
пустым, это значит, что есть хотя бы один путь в 𝐺⃗𝑦 из 𝑅𝑉 в 𝑅𝑈 . Выбираем любой из таких
путей, и изменяем ориентацию всех его ребёр на обратную. Размер паросочетания
увеличится на 1.
Для доказательства отметим два очевидных факта:
o
На выбранном пути рёбра из 𝑉 в 𝑈 чередуются с рёбрами из 𝑈в 𝑉 . Это следует из
двудольности графа.
o
Первая вершина пути принадлежит 𝑉 , а последняя — 𝑈. Следовательно, первое и
последнее его рёбра направлены из 𝑉 в 𝑈.
По определению 𝐺⃗𝑦 , отсюда следует, что на выбранном пути рёбра,
принадлежащие и не принадлежащие 𝑀, чередуются, причём первое и последнее рёбра
не принадлежат 𝑀, то есть путь является повышающим, откуда и следует доказываемое
утверждение.
Если 𝑅𝑈 ∩ 𝑍 = ∅, положим
15
𝛥: = min{𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗): 𝜐𝑖 ∈ 𝑉 ∩ 𝑍, 𝑢𝑗 ∈ 𝑈 ∖ 𝑍} > 0,
потому что нет жёстких рёбер между 𝑉 ∩ 𝑍 и 𝑈 ∖ 𝑍.
В самом деле, пусть такое ребро (𝜐𝑖 , 𝑢𝑗 ) существует. Поскольку 𝜐𝑖 ∈ 𝑍, но 𝑢𝑗 ∉ 𝑍,
вершина 𝜐𝑖 достижима из 𝑅𝑉 в 𝐺⃗𝑦 , а вершина 𝑢𝑗 недостижима. Следовательно, 𝐺⃗𝑦 , не
может содержать ребра (𝜐𝑖 , 𝑢𝑗 ), откуда (𝜐𝑖 , 𝑢𝑗 ) ∊ 𝑀 и 𝜐𝑖 ∉ 𝑅𝑉 . Поскольку 𝜐𝑖
достижима из 𝑅𝑉 в 𝐺⃗𝑦 , существует путь в 𝜐𝑖 из какой-то вершины, принадлежащей 𝑅𝑉 .
Рассмотрим последнее ребро этого пути. Обозначим его (𝑢𝑘 , 𝜐𝑖 ). Поскольку 𝑢𝑘
достижима из 𝑅𝑉 в 𝐺⃗𝑦 , а 𝑢𝑗 недостижима, 𝑢𝑘 ≠ 𝑢𝑗 . Т.к. (𝑢𝑘 , 𝜐𝑖 ) ∊ 𝐺⃗𝑦 , (𝜐𝑖 , 𝑢𝑘 ) ∊ 𝑀.
Следовательно, 𝜐𝑖 инцидентна сразу двум рёбрам из 𝑀: (𝜐𝑖 , 𝑢𝑗 ) и (𝜐𝑖 , 𝑢𝑘 ), что
невозможно, так как 𝑀 — паросочетание.
Увеличим 𝑦 на 𝛥 на вершинах из 𝑉 ∩ 𝑍 и уменьшим 𝑦 на 𝛥 на вершинах, входящих
в 𝑈 ∩ 𝑍 . Новый 𝑦 остаётся потенциалом.
В самом деле, для любого ребра (𝜐𝑖 , 𝑢𝑗 ), 𝜐𝑖 ∈ 𝑉, 𝑢𝑗 ∈ 𝑈:
o
если 𝜐𝑖 ∉ 𝑍, 𝑢𝑗 ∉ 𝑍, то 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) не меняется, потому что не
меняются ни 𝑦(𝜐𝑖 ), ни 𝑦(𝑗);
o
если 𝜐𝑖 ∊ 𝑍, 𝑢𝑗 ∊ 𝑍, то 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) не меняется, потому что
𝑦(𝜐𝑖 ) увеличивается на 𝛥, а 𝑦(𝑗) на столько же уменьшается;
o
если 𝜐𝑖 ∉ 𝑍, 𝑢𝑗 ∊ 𝑍, разность 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) увеличивается на 𝛥,
следовательно, остаётся неотрицательной;
o
если 𝜐𝑖 ∊ 𝑍, 𝑢𝑗 ∉ 𝑍, 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) уменьшается на 𝛥, но всё равно
остаётся неотрицательной, потому что 𝛥 — наименьшая из таких разностей.
Граф 𝐺⃗𝑦 меняется, но, несмотря на это, содержит 𝑀.
В самом деле, чтобы исключить из 𝐺⃗𝑦 некое ребро (𝜐𝑖 , 𝑢𝑗 ), 𝜐𝑖 ∈ 𝑉, 𝑢𝑗 ∈ 𝑈, надо
сделать его нежёстким, то есть повысить разность 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗). Как мы
видели, разность повышается, только если 𝜐𝑖 ∉ 𝑍, 𝑢𝑗 ∊ 𝑍, иными
16
словами, 𝜐𝑖 недостижима из 𝑅𝑉 , а 𝑢𝑗 достижима. Но в таком случае ребро (𝜐𝑖 , 𝑢𝑗 ) не
может принадлежать 𝐺⃗𝑦 , следовательно, ребро не принадлежит 𝑀.
Ориентируем новые рёбра от 𝑉 к 𝑈. По определению 𝛥, множество 𝑍 вершин,
достижимых из 𝑅𝑉 , увеличится (при этом число жёстких рёбер вовсе не обязательно
возрастёт).
Для доказательства этого утверждения сначала покажем, что ни одна вершина не
пропадёт из 𝑍. Пусть 𝜐 ∊ 𝑍, тогда существует путь из некой вершины,
принадлежащей 𝑅𝑉 , в 𝜐. Все вершины на этом пути достижимы из 𝑅𝑉 , т.e. принадлежат
𝑍. Каждое рёбро на этом пути инцидентно двум вершинам из Z. Как мы видели выше, для
таких рёбер разность 𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) не меняется. Значит, все рёбра пути
останутся жёсткими, и 𝜐 по-прежнему будет достижима из 𝑅𝑉 ,. Теперь докажем, что хотя
бы одна вершина добавится к 𝑍. Рассмотрим ребро, на котором достигается
min{𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗): 𝜐𝑖 ∈ 𝑉 ∩ 𝑍, 𝑢𝑗 ∈ 𝑈 ∖ 𝑍}. Для этого ребра, разность
𝑐(𝜐𝑖 , 𝑢𝑗 ) − 𝑦(𝜐𝑖 ) − 𝑦(𝑗) обнулится, следовательно, оно станет жёстким и будет
направлено от 𝑉 к 𝑈, то есть от 𝜐𝑖 к 𝑢𝑗 . Поскольку 𝜐𝑖 ∈ 𝑍, 𝑢𝑗 также станет достижимым
из 𝑅𝑉 , то есть добавится к 𝑍.
Повторяем эти шаги до тех пор, пока 𝑀 не станет совершенным паросочетанием; в
этом случае оно даёт назначение с наименьшей стоимостью. Время выполнения этой
версии алгоритма равно 𝑂(𝑛4 ): 𝑀 дополняется 𝑛 раз, а в стадии, когда 𝑀 не меняется,
может быть не более 𝑛 изменений потенциала (так как 𝑍 увеличивается каждый раз).
Время, необходимое на изменение потенциала, равно 𝑂(𝑛2 ).
3.3 Применение венгерского алгоритма к проблеме
сопоставления номерных знаков
Венгерский алгоритм может быть применен к задаче, решаемой в данной работе.
Основная задача – расставить весовые коэффициенты и, как следствие, стоимость.
Для решения данной проблемы проведем анализ номерного знака. Номер состоит
из 3 символов 12-значного алфавита L и 3 символов 10-значного алфавита D:
17
L = {A, B, C, E, H, K, M, O, P, T, X, Y},
(1)
D = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9},
(2)
и имеет вид ldddll ∈ {VID}, где l ∈ L, d ∈ D (номер региона в данной работе не
учитывается), {VID} – множество номерных знаков.
Вследствие плохой читаемости номерного знака, обусловленной неблагополучными
погодными условиями или намеренным загрязнением номера, возможны три типа
распознанных символов:
o
o
o
символы, распознанные корректно;
символы, распознанные с ошибкой;
нераспознанные символы (в данной работе обозначаются *).
𝐷
𝐿
Введем стохастические матрицы 𝑃 𝐷 и 𝑃 𝐿 , элементы 𝑝𝑖𝑗
и 𝑝𝑖𝑗
которых определяет
вероятность перехода -ого символа из алфавита D (L) в 𝑗-ый символ того же алфавита.
𝐿
Например, если вероятность распознать Е как Е равна 0.9, то 𝑝44
= 0.9. Данная матрица
может быть получена эмпирическим путем в результате работы системы и динамически
меняться, в зависимости от уровня распознавания номеров, т.е. от состояния окружающей
среды. Тогда при наличии двух номеров, можно рассчитать вероятность перехода одного
номера в другой как произведение соответствующих вероятностей:
𝐷
𝐿
𝐿
𝐿
𝐷
𝐷
𝑤𝑖𝑗 = 𝑝𝑖1,𝑗1
𝑝𝑖2,𝑗2
𝑝𝑖3,𝑗3
𝑝𝑖4,𝑗4
𝑝𝑖5,𝑗5
𝑝𝑖6,𝑗6
,
(3)
где 𝑖𝑘 – 𝑘-ый знак -ого номера первого массива, а 𝑗𝑘 – 𝑘-ый знак 𝑗-ого номера второго
массива. Такую вероятность можно использовать в качестве весов в двупольном графе
задачи и построить соответствующем образом стоимость:
с𝑖𝑗 = 𝑊 − 𝑤𝑖𝑗 , 𝑊 ≥ max 𝑤𝑖𝑗 .
𝑖𝑗
Таким образом, при помощи венгерского алгоритма можно построить на основе
вероятности перехода оптимальное паросочетание. У предложенного метода есть два
существенных недостатка:
o венгерский алгоритм гарантирует минимальную стоимость полученного
паросочетания, но не гарантирует соответствие реальному сочетанию номерных
знаков;
o решение достаточно сложное (𝑂(𝑛4 ) ), учитывая его ненадежность.
18
(3)
Поэтому была предпринята попытка понизить сложность алгоритма, сохранив
степень надежности решения.
4 Алгоритм сопоставления автомобильных
государственных номеров
Алгоритм сопоставления автомобильных государственных номеров (VID Equivalence
Algorithm, VEA) позволяет соотнести номера в потоке, полученном с камеры с номерами в
потоке, полученном с RFID-считывателя. Основная цель работы алгоритма – соотнести
номерные знаки из двух потоков между собой. Это позволяет с одной стороны не
вмешиваться напрямую в работу существующих систем, с другой стороны обеспечить
надежное распознавание номера в случае плохих условий для работы камеры. Таким
образом, алгоритм является посредником в работе системы камера-радар и RFIDсчитывателя, позволяя получить преимущество применения радиометок для улучшения
качества контроля над нарушениями правил ПДД.
4.1 Входные параметры
В результате работы камера регистрирует не только номер ТС, но и момент времени
фиксации, тем самым на выходе получается пары {VID, timestamp}, где VID –
автомобильный номер, timestamp – временная метка:
VID
timestamp
C759MH
12448190872
K525BE
12453149304
…
Значение времени отсчитывается от условного момента до момента фиксации
камерой (в микросекундах). Данное значение номера (VID) может быть не распознано изза неблагоприятных погодных условий (например, грязный номер):
VID
timestamp
…
19
C*59*H
12448190872
…
Аналогичный поток приходит с RFID-считывателя:
VID
timestamp
C759MH
12454192832
K525BE
12458149506
…
Значение VID не искажается (ошибка чтения метки мала), однако значение времени
иное (автомобилю необходимо проехать расстояние между областями распознавания
камеры и RFID-считывателя). Может измениться порядок, если произошел обгон.
Таким образом, формируется два потока номеров: поток с камеры и поток с RFIDсчитывателя. Рассматриваемый в этой главе алгоритм предполагает работу с массивами
номеров, а не с непрерывным потоком. Тем не менее, можно расширить область его
применения путем использования механизма «скользящего окна»: входной поток
делится на блоки, каждая из которых обрабатывается алгоритмом. При этом для анализа
номеров выделяется дополнительный блок номеров (помеченный светло-серым на рис.
7.), поскольку пара для номера, находящегося вблизи границы блока, может находиться в
соседнем блоке, что может привести к ошибочному результату или отсутствию такового
вообще. Размер дополнительного блока определяется при анализе временных меток.
Номера, которые используются для поиска соответствия
Номера, которым ищутся соответствия
Рис. 7. Механизм «скользящего окна».
20
4.2 Сопоставление массивов
4.2.1 Общая схема работы алгоритма
Работа алгоритма представлена несколькими последовательными этапами. Из
массива номеров, полученных с RIFD-ридера, выбирается по порядку номер. Для этого
номера происходит расчет временного окна – диапазон номеров с фоторегистратора,
среди которых потенциально может быть искомый номер. Каждый номер из временного
окна (номер из массива камеры) сопоставляется с выбранным ранее номером с RFIDсчитывателя при помощи функции сопоставления (функция эквивалентности), в задачу
которой входит численная оценка степени схожести номеров. Таким образом, получается
набор весов – результатов работы функции эквивалентности, – среди которых
производиться поиск наибольшего значения и, как следствие, номера из временного
окна, наилучшим образом соответствующий выделенному номеру.
Пройдя в цикле по всем номерам из массива номеров RFID-ридера, получается
промежуточный результат работы алгоритма – массив пар номеров. Сложность данного
этапа зависит не только от размера входного массива номеров, но и от среднего числа
номерных знаков, попадающих во временное окно (т.е. от интенсивности движения – чем
больше ТС проедет область фиксации за период времени, равный размеру окна, тем
больше номерных знаков окажется в этом окне). Так, если в это окно попал только один
номер, то задача становиться тривиальной, и время ее выполнения линейное O(n). Другой
крайний случай: во временное окно в среднем попадают почти все номера. В этом случае
оценка составляет O(n2). В промежуточном состоянии время работы алгоритма – O(n<m>),
где <m> - среднее число номерных знаков во временном окне.
Однако этот результат не может быть окончательным – в нем потенциально
содержаться ошибки и неоднозначности, обусловленные следующими причинами:
o
наибольшему значению функции эквивалентности может соответствовать
несколько номеров. Таким образом, мы не сможем выбрать на данном этапе
верный номер. Это проблема обнаруживается сразу при появлении.
o
В результате работы алгоритма, два разных номера со считывателя могут
ссылаться на один и тот же номер с камеры. Это ошибочный результат, но он
может быть обнаружен проверкой после окончания текущего этапа.
21
o
Также появляется проблема, являющаяся следствием одновременного наличия
первых двух проблем (особенно актуальна в случае, если символ номерного
знака не был распознан).
В результате возникает необходимость в наличии следующего этапа (или
нескольких этапов) проверки, основная цель которых – устранить ошибочные результаты
работы предыдущего этапа. О них будет рассказано далее.
4.2.2 Генерация временного окна
Основной целью временного окна является ограничение количества перебираемых
номерных знаков, полученных с камеры, при поиске соответствий между элементами
двух массивов.
Окна вычисляется из простых соображений: известно расстояние между областями
считывания LCAM - LRFID, и также имеется возможность оценки минимальной скорости ТС в
потоке Vmin. На основе этого вычисляется максимальное время, необходимое ТС, чтобы
проехать расстояние между районами видео- и радиофиксациями:
𝜏𝑚𝑎𝑥 =
L𝐶𝐴𝑀 − L𝑅𝐹𝐼𝐷
(4)
𝑉𝑚𝑖𝑛
Тогда временное окно может быть вычислено как
[𝑇𝑅𝐹𝐼𝐷 − 𝜏𝑚𝑎𝑥 ; 𝑇𝑅𝐹𝐼𝐷 ].
(5)
В общем случае параметры, используемые для оценки временного окна, могут
меняться, однако для простоты в данной работе они считаются неизменными.
Номера, попавшие во временное окно
CAMERA
RFID
Задержка начала считывания
номеров RFID-модулем
Рис. 8. Механизм временного окна.
22
Start
false
d < dMAX
true
false
Collect statistics
i < size
true
End
Compute time
window (TW)
Compute weights wij
within TM
false
k: TCAM[k] ∈ TM
true
wij == wmax
false
isResolved = 1
jMAX = k
wij = wmax
true
isResolved = 0
false
isResolved
true
res[i].cam = cam[jMAX]
res[i].rfid = rfid[i]
Verification 1
Verification 2
Рис. 9. Общая схема алгоритма.
23
4.2.3 Функции эквивалентности
Для определения степени соответствия одного номера другому требуется числовая
функция сравнения на двумерном множестве номерных знаков:
𝐸𝑞 ∶ {𝑉𝐼𝐷}2 → 𝐺 ∈ 𝑅 .
(6)
Например, следующие функция, определяющая число совпавших символов на
соответствующих позициях и 0 в случае, если на одной и той же позиции оба символа
распознаны и различны (данная функция используется в текущей реализации алгоритма):
𝐸𝑞(C759MH, C759MH) = 6 ,
(7)
𝐸𝑞(C759MH, K525BE) = 0 ,
(8)
𝐸𝑞(C759MH, C ∗ 59 ∗ H) = 4 ,
(9)
𝐸𝑞(C759MH, C ∗ 59MH) = 5.
(10)
Таким образом, удается расставить вес каждого ребра в соответствующем задаче
графе:
𝑤𝑖𝑗 = 𝐸𝑞(VID𝑖 , VID𝑗 ).
(11)
Существует возможность использования различные варианты функции
эквивалентности, например функцию, ставящую в соответствие вероятность перехода
одного номера в другой.
4.2.4 Проверка результата
В результате работы алгоритма может получиться ситуация, когда нескольким
номерам с RFID-считывателя поставлен в соответствие один и тот же номер с
камеры:
RFID
CAMERA
𝑤𝑘𝑙
k
k+1
k+N-1
…
𝑤𝑘+1,𝑙
l
𝑤𝑘+𝑁−1,𝑙
Рис. 10. Ошибка выбора соответствия.
В этом случае можно сравнить веса 𝑤𝑘𝑙 получившихся пар, найти строгий максимум (если
он существует) и окончательно выбрать тот номер из массива RFID, который наиболее
соответствует номеру из массива камеры (или принять факт невозможности определения
соответствия).
24
RFID
RFID
CAMERA
CAMERA
1
3
2
…
2
…
2
2
a)
b)
Рис. 11. Решение проблемы; a) можно установить соответствие,
b) нельзя установить соответствия (нестрогий максимум).
Иногда наличие в неоднозначности выбора индуцирует другую ошибку:
RFID
CAMERA
𝑤𝑗𝑙
j
l
𝑤𝑘𝑙
k
𝑤𝑘𝑚 = 𝑤𝑘𝑙
𝑤𝑘+1,𝑙
𝑚
𝑤𝑗𝑙 ≤ 𝑤𝑘𝑙
𝑤𝑘+1,𝑙
Рис. 12. Ошибка, вызванная неоднозначностью выбора, со стороны элемента,
для которого установлено однозначное соответствие.
В этом случае, если установлено соответствие j – l, но вполне вероятно, что истинное
соответствие k – l (не установлено в силу неоднозначности выбора). В этом случае
изначально однозначный выбор становиться ошибочным и требует корректировки. Для
решения проблемы необходима проверка всех возникших неоднозначностей и для
каждой из них сравнение весовых коэффициентов.
Также возможна иная ситуация:
RFID
j
CAMERA
𝑤𝑗𝑙
l
𝑤𝑘𝑙
s
k
q
r
i
𝑤𝑘𝑚 = 𝑤𝑘𝑙
𝑤𝑘+1,𝑙
𝑤𝑖𝑚
𝑚
𝑤𝑗𝑙 , 𝑤𝑖𝑚 ≥ 𝑤𝑘𝑙 =𝑤𝑘𝑚
𝑤𝑘+1,𝑙
Рис. 13. Ошибка, вызванная неоднозначностью выбора, в случае, когда
неправильно определены потенциальные пары.
25
В этом случае неправильно определены пары k – l, k – m, которые не содержат
верное соответствие. В результате, может возникнуть неоднозначность при более низких
весовых коэффициентах и повторении ошибки, учтенной ранее. Проблема решается
рекурсивно. Сначала перебором проверяются все неоднозначности. В случае, если
зафиксирована данная ошибка, для данного номера RFID массива проводиться поиск
наибольшего значения среди весовых коэффициентов, отличного от старого. В случае,
если выбор однозначен или фиксируется ошибка, описанная ранее, процедура
останавливается, а ошибка (если есть) – исправляется. Если же возникает ситуация,
аналогичная исходной, процедура повторяется.
4.3 Итог работы алгоритма
На выходе алгоритма получается массив пар {{VIDCAM, TCAM}, {VIDRFID, TRFID}}, где
каждому номеру с RFID-считывателя (достоверно известному номеру) поставлен в
соответствие предполагаемый номер с камеры. Информация о времени считывания
также сохраняется. В случае потока на выходе алгоритма будет, соответственно, поток
номеров.
RFID
camera
C359МH
C*59*H
М584СМ
М58*СМ
B572AC
-----…
Как можно заметить, происходит коррекция значений автомобильных номеров там,
где это возможно. Тем самым, увеличивается общий процент распознанных номеров.
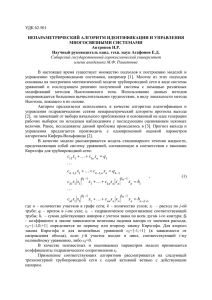
5 Моделирование
Для проверки корректной работы алгоритма, а также для сбора статистических
характеристик было написано приложение на языке C, в число задач которого входит как
создание программной реализации алгоритма, так и создание окружения, необходимого
для работы алгоритма (генерация двух потоков автомобильных номеров). Один поток
отождествляется с потоком номеров, полученных на выходе алгоритма распознавания
номеров с изображения, полученной камерой; другой поток имитирует поток номеров,
26
полученных с RFID-считывателя. Во время генерации потоков учитывается состояние
окружающей среды (набор параметров, задаваемых динамически – так имеет
возможность изменять эти параметры во время исполнения, моделируя изменение
погодных условий). Также существует возможность использовать различные функции
эквивалентности.
5.1 Алгоритм моделирования окружающей среды
Алгоритм моделирования окружающей среды циклический. На каждой итерации
задается параметры среды (посредством задании матрицы перехода), генерируется
количество автомобильных номеров, временной интервал их появления (параметры
случайны, но имеется возможность задания предельных значений, тем самым
ограничивать интенсивностью потоков) и сами потоки автомобильных номеров. После
чего запускается алгоритм сопоставления номеров и собирается статистика работы
алгоритма. Благодаря такому подходу, существует возможность моделировать изменение
интенсивности движения автомобилей и состояние окружающей среды, оказывающей
непосредственное влияние на качество распознавания номеров камерой.
5.2 Генерация потоков номеров
Потоки автомобильных номеров с камеры и с RFID-считывателя не являются
полностью независимыми: фактически, оба потока связаны неким преобразованием,
зависимым от случайных величин – изначально поток номеров един (у каждого
транспортного средства только один номер). Двойственность возникает из-за различных
способов считывания: различные временные метки, т.к. области считывания разделены в
пространстве и искаженный результат распознавания номера камерой (ошибкой RFIDсчитывателя пренебрегаем как малой величиной).
Отсюда следует, что необходимо генерировать лишь один поток, а дальше,
применяя к нему два различных преобразования, окончательно получать на выходе два
потока.
5.2.1 Генерация номера
Автомобильные номера генерируется циклически с проверкой на уникальность (не
может быть два одинаковых номера). К каждому номеру добавляется случайное время из
27
временного диапазона (символизирует время проезда области считывания камеры). По
окончании процедуры, номера обоих потоков сортируются по временным меткам.
Для моделирования вывода RFID-считывателя, номеру из соответствующего потока
присваивается неискаженный сгенерированный номер и временная метка, сдвинутая на
случайную величину в пределах интервала, обусловленного минимальной и
максимальной скоростями.
В случае вывода камеры изменению подвержены сами номера, в то время как
временные метки остаются неизменными. Символы номера преобразуются случайно в
соответствии со стохастической матрицей перехода. В результате трансформации,
каждый символ может как остаться прежним, так и измениться или стать
нераспознанным.
28
Рис. 2. Схема работы среды моделирования
29
6 Заключение
Рассмотрена возможность значительного улучшения качества регистрации
нарушения ППД при помощи метода радиочастотной идентификации (технология RFID),
архитектура системы, позволяющей использовать данный метод, а также проблема
сопоставления государственных номерных знаков, полученных в результате
видеофиксации, и номерных знаков, полученных с RFID-считывателя как ключевой
механизм интеграции в существующие системы.
Проведена работа по созданию и программной реализации алгоритма
сопоставления номеров; проведены работы по моделированию потоков ТС и влияния
погодных условий на качество распознавания номерных знаков. С помощью данного
моделирования проверена работоспособность алгоритма, а также его эффективность.
Все работы по созданию алгоритма и моделированию его работы проводились при
условии, что номерной знак, считанный методом видеофиксации, содержит только
корректно распознанные символы, либо содержит псевдосимвол, обозначающий
невозможность распознать данный символ, но не содержит ошибочно прочитанный
символ. При данных ограничениях работа проведена в полной мере. В дальнейшем
планируется учесть возможность ошибочного вывода камеры и проведению
моделирования в подобных условиях.
30
7 Список литературы
[1] Р. Н. Минниханов, «Опыт применения систем видеофиксации нарушений правил
дорожного движения (на примере Республики Татарстан)», Казань: ГУ "НЦ БЖД", 2009, p.
128.
[2] В. М. Вишневский, С. Л. Портной и С. Л. Шахнович, «Энциклопедия WiMAX. Путь к 4G», М.:
Техносфера, 2010, p. 471.
[3] К. Финкенцеллер, «Справочник по RFID», М.: Издательский дом «Додека-ХХI», 2008, p. 496.
[4] М. Р. Вишневский В.М., ««Автоматизированная система контроля нарушений ПДД на базе
широкополосных беспроводных сетей и RFID-технологии»». Патент № 99207, 10 11 2010.
[5] В. М. Вишневский и Р. Н. Минниханов, ««Автоматизированная система контроля
нарушений правил дорожного движения с использованием RFID-технологий и новейших
беспроводных средств»».
[6] Х. Пападимитриу и К. Стайглиц, Комбинаторная оптимизация. Алгоритмы и сложность.,
М.: Издательство мир, 1984.
31