А.В. Маргелов, А.М. Никифоров ЯЧЕЙКА КОММУТИРУЮЩЕЙ
реклама

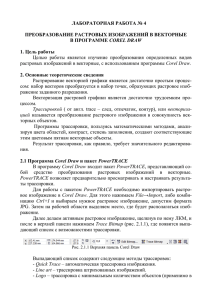
Материалы Международной конференции Интеллектуальные САПР” “ Рис.4. Трехмерная поверхность зависимости магнитной энергии, остаточной индукции и коэрцитивной силы серии образцов постоянных магнитов ЛИТЕРАТУРА 1. 2. Малюков С.П. Стекловидные диэлектирики в производстве магнитных головок: Монография. – Таганрог: изд-во ТРТУ, 1998. Норенков И.П., Маничев В.Б. Основы теории и проектирования САПР. - М.: Высш. Шк., 1990. – 272 с. УДК 658.512 А.В. Маргелов, А.М. Никифоров ЯЧЕЙКА КОММУТИРУЮЩЕЙ СРЕДЫ ДЛЯ ОДНОВРЕМЕННОЙ ТРАССИРОВКИ ЦЕПИ В работе [1] предложена ячейка коммутирующей среды, которая в сравнении с известной ячейкой [2] позволяет автоматически устанавливать кратчайшие трассы во время волнового процесса в трассирующей модели. При этом ячейке р Є Р (Р ─ множество ячеек ─ источников сигнала трассирующей модели М= (Х,U), где Х ─ множество ячеек, U ─ множество звеньев этой модели) задаётся признак источника сигнала путём подключения его к источнику напряжения с потенциалом ϕр относительно общей шины модели. Вершине q Є Q, где Q ─ множество ячеек ─ приемников сигнала, задается признак приемника. В модель по звеньям прилежащим к узлам Р начинает распространяться волна потенциала поиска. На узлы модели наложено ограничение несливания токов поиска при схождении на ячейках, пути к которым оказали одинаковую задержку волне. Звено umi подключается к прилегающей ячейке х, если функция тока Sumi,xl через ключ, разделяющий звено umi и узел xl, определяется Sumi,xl = ϕumi n ϕxl, где Sumi,xl 244 n = U Sumi,xl ─ множество возможных функций токов, m −1 (1) Известия ТРТУ Тематический выпуск через ключ втекающих в х ячейку, n ─ число прилегающих звеньев. При выполнении условия (1) одновременно для нескольких прилегающих звеньев ячейка подключается лишь к одному из них. Однако среда, построенная из этих ячеек, обладает недостаточным быстродействием и ограниченным числом трассируемых путей. Авторами разрабатываются другие виды ячеек коммутирующих сред, которые позволяют устранить отмеченные недостатки путём: реализации алгоритма встречной волны; реализации лучевого алгоритма; разработки коммутирующей ячейки, обеспечивающей трассировку многотерминальных цепей. Реализация третьего пути дополнительно позволяет расширить функциональные возможности за счёт одновременного разведения, например, цепей питания. Предлагается процесс разводки цепи начинать не с одной вершины, как в волновом алгоритме Ли, и не с пары вершин, как в двунаправленном волновом режиме трассировки, а для всех вершин цепи одновременно. В момент времени to из всех вершин цепи (пусть их будет n штук) начинает распространяться волна трассировки. Таким образом, всего распространяется n волн трассировки. В какой-то момент времени tк происходит слияние двух волн трассировки wi и wj. Полученный маршрут routei-j заносится в память маршрутов и процесс трассировки продолжается. Описанный выше процесс продолжается до тех пор, пока не будет получено (n-1) путей routei-j, после чего процесс трассировки прекращается. Таким образом, мы протрассировали всю цепь из n вершин за время, равное времени нахождения пути всего между двумя наиболее отдалёнными вершинами. Оценим эффективность данной модели. Временная сложность алгоритма Ли будет равна O((n-1)R2), где n – количество вершин, R – среднее расстояние между двумя вершинами; радиус, возведённый во вторую степень, символизирует площадь, покрываемую волной трассировки (So=πR2). Тогда временная сложность двунаправленного алгоритма будет O((n-1)(R/2)2)=O((n-1)R2/4), при одновременном прохождении двух волн (в силу того, что расстояние, покрываемое одной волной, уменьшается вдвое), и O(2(n-1)*(R/2)2)=O((n-1)R2/2), при прохождении этих волн в режиме разделения времени (псевдоодновременный режим). Таким образом, при одновременном проведении двух волн трассировки (возможно при аппаратной реализации коммутирующего поля) затраченное время сокращается в четыре раза, а при псевдоодновременном проведении волн (возможно при программной и программно-аппаратной реализации коммутирующего поля) затраченное время сокращается в два раза. Временная сложность алгоритма, описанноко в заявке, будет равна O((R/2)2)=O(R2/4), при одновременном прохождении двух волн (в силу того, что расстояние, покрываемое каждой волной, уменьшается вдвое), и O(2(n-1)*(R/2)2)=O((n-1)R2/2), при прохождении этих волн в режиме разделения времени (псевдоодновременный режим). Отсюда видно, что при аппаратной реализации коммутирующего поля время, затраченное на любую цепь, равно времени поиска пути между парой наиболее удалённых вершин цепи, а при программной и программно-аппаратной реализации коммутирующего поля не отличается от времени поиска пути по двунаправленному алгоритму, а только приводит к усложнению алгоритма программы и увеличению объёма требуемой памяти. Таким образом, предлагается использование данной ячейки при аппаратной реализации среды трассировки, а при программно-аппаратной реализации рекомендуется применение двунаправленного алгоритма. Среда, построенная из предлагаемых ячеек, способна в кратчайшие сроки автоматически устанавливать кратчайшие трассы, запрещать распространение волны поиска 245 Материалы Международной конференции Интеллектуальные САПР” “ кратчайшей трассы в заданных направлениях, контролировать прохождение трассы, получать полную картину печатного монтажа платы. ЛИТЕРАТУРА 1. 2. Авторское свидетельство СССР № 427337. Авторское свидетельство СССР № 408303. УДК 658.512.2.011.5 Н.К. Лисяк О ВЛОЖИМОСТИ ЗАДАЧ ГЕОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЙ В АРХИТЕКТУРУ МАКРОКОМПЬЮТЕРА Важнейшей составляющей практически любой САПР (в радиоэлектронике, машиностроении, строительстве и др.) является графическая подсистема. В настоящее время такие подсистемы развиваются в рамках их использования в интегрированных САПР, имеющих прямой выход на автоматизированное производство. В связи с этим прикладная составляющая графических подсистем ориентирована не на чертёж или данные чертежа, а на данные объекта проектирования, что вызвало развитие средств геометрического пространственного моделирования объекта проектирования. Математическое обеспечение систем геометрического моделирования хорошо известно, но, как часто бывает, усложнение объектов проектирования заставляет разработчиков САПР искать новые более эффективные пути реализации проектных процедур в рамках традиционной последовательной архитектуры ЭВМ или экстраполировать уже известные методы в область нетрадиционных перспективных архитектур ЭВМ. Представляется интересным рассмотреть некоторые аспекты задач геометрического моделирования применительно к архитектуре СуперЭВМ с перестраиваемой архитектурой [1] (макрокомпьютер). Прежде всего рассмотрим реализацию геометрических преобразований в трёхмерной области в архитектуре макрокомпьютера. В обобщённой матрице преобразования 4x4 для трёхмерных однородных координат можно выделить четыре отдельных части n11 n N = 21 n31 n41 n12 n22 n32 n42 n13 n23 n33 n43 n14 n24 3 × 3 3 ×1 → n34 1× 3 1×1 n44 Подматрица 3x3 осуществляет линейные преобразования масштабирования, сдвига, отображения и вращения. Матрица-строка 1x3 выполняет операцию переноса изображения, а матрица-столбец 3x1 осуществляет преобразование в перспективе. Последний скалярный элемент 1x1 выполняет общее пропорциональное масштабирование по всем трём осям. Тогда геометрическое преобразование объекта P в матричной форме будет иметь вид: P* = P • N; || х* у* z* h || = || х у z 1 || • N , 246