ИССЛЕДОВАНИЕ ВЛИЯНИЯ МЕРТВОГО ВРЕМЕНИ В
реклама

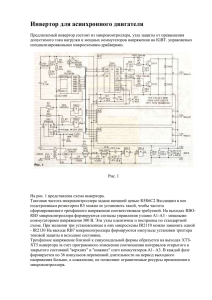
Доповіді за метеріалами Міжнародної науково-технічної конференції молодих учених, аспірантів і студентів. Сучасні проблеми елетроенерготехніки та автоматики. – Київ: «Політехніка», 2009. – 453 с. СЕКЦІЯ 5: АВТОМАТИЗАЦІЯ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ ТА ЕЛЕКТРОПРИВОД ИССЛЕДОВАНИЕ ВЛИЯНИЯ МЕРТВОГО ВРЕМЕНИ В ПРЕОБРАЗОВАТЕЛЯХ ЧАСТОТЫ Пересада С.М., проф., Ковбаса С.Н., доц., Дымко С.С., аспирант кафедра автоматизации электромеханических систем и электропривода Введение. Одной из основных составляющих частей современных регулируемых электроприводов переменного тока являются автономные инверторы напряжения (АИН). Управление ключами АИН осуществляется с использованием векторной широтно-импульсной модуляции (ВШИМ) так, чтобы вектор первой гармоники выходного напряжения инвертора с максимальной точностью воспроизводил заданный вектор напряжения [1]. На практике достичь идентичности заданного и выходного напряжений инвертора невозможно из-за: 1. Введения мертвого времени (МВ) при коммутации ключей в стойке инвертора. 2. Конечного времени включения-выключения ключей. 3. Падения напряжения на ключах в режиме проводимости. Эти факторы определяют неидеальности инвертора, которые обобщенно принято называть проблемой мертвого времени АИН. Этой проблеме посвящено значительное количество исследований, но определенного общепризнанного ее решения не найдено. Целью настоящей статьи является исследование методов компенсации мертвого времени, разработка методики тестирования с целью определения точности компенсации. В качестве примера рассмотрен алгоритм, предложенный группой Siemens [2]. 1. Механизм возникновения мертвого времени При ВШИМ существует восемь возможных состояний инвертора. Каждому состоянию инвертора может быть поставлен в соответствие пространственный вектор напряжения uk , k 0,1, ..., 8 . Шесть активных векторов uk , k 1, 2, ..., 6 имеют одинаковую амплитуду и сдвинуты друг относительно друга на угол / 3 . Обобщенное выражение для восьми пространственных векторов напряжения может быть представлено в следующем виде: j (k 1) 2 3 Vd e , k 1,2,...,6 uk 3 0 , k 0,8 Используя широтную модуляцию пространственных векторов u k (k=1,2,…8) возможно реализовать любой из векторов напряжения, который расположен внутри шестиугольника. Для этой цели рассчитываются времена действия активных и нулевых состояний инвертора. После этого необходимо сформировать коммутационные сигналы ключей и подать их через драйверы на затворы соответствующих ключей инвертора. 35 Доповіді за метеріалами Міжнародної науково-технічної конференції молодих учених, аспірантів і студентів. Сучасні проблеми елетроенерготехніки та автоматики. – Київ: «Політехніка», 2009. – 453 с. СЕКЦІЯ 5: АВТОМАТИЗАЦІЯ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ ТА ЕЛЕКТРОПРИВОД При одновременной смене состояний импульса управления верхним и нижним ключом произойдет короткое замыкание, поскольку мгновенный переход инвертора из одного состояния в другое физически невозможен, в следствии конечного времени запирания ключей. Для предотвращения этой ситуации, между выключением одного ключа и включением другого выдерживается пауза, которая и называется мертвым временем, t DT . 2.Разработка алгоритма компенсации мертвого времени Поскольку, рассчитанные на основании заданного напряжения длительности включения состояний инвертора TAon ,TBon ,TCon при добавлении интервала мертвого времени будут отличаться от расчетных, то и результирующее напряжение на выходе АИН также будет отличаться от заданного. Для анализа этой проблемы примем следующие допущения: - падение напряжения на открытом ключе пренебрежимо мало; - импульсы управления имеют идеальные фронты; - переход между включенным и выключенным состоянием ключа определяется значениями t ON , t OFF , t DT . - напряжение звена постоянного тока Udc const . Средняя за период коммутации ошибка отработки напряжения записывается u k Uf 0sign i k , (1) где i k ток фазы на периоде коммутации, 1 если i k 0 sign i k 1 если i k 0 0 если i k меняет знак на периоде ТS Uf 0 Udc t TS . (2) В выражении (2) t – разность между реальной длительностью включения состояния инвертора и расчетной t t DT t ON t OFF Используя векторное представление, определим усредненный пространственный вектора ошибки отработки напряжения 2 u1 au 2 a 2 u 3 (3) Δu 3 j2 где a e 3 . С учетом (1), (2), (3) усредненный пространственный вектора ошибки отработки напряжения запишется в форме (4) Для компенсации влияния МВ вектор ошибки (3) добавляется к вектору задающего напряжения инвертора u* . 36 Доповіді за метеріалами Міжнародної науково-технічної конференції молодих учених, аспірантів і студентів. Сучасні проблеми елетроенерготехніки та автоматики. – Київ: «Політехніка», 2009. – 453 с. СЕКЦІЯ 5: АВТОМАТИЗАЦІЯ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ ТА ЕЛЕКТРОПРИВОД 4 если все токи отличны от нуля 3 U f 0sign i 2 3 Δu U f 0sign i один из токов равен нулю 3 два тока равны нулю U f 0sign i все токи равны нулю 0 где sign i (4) sign i1 asign i 2 a 2sign i3 sign i1 asign i 2 a 2sign i3 Практическая реализация такого алгоритма компенсации для трехфазного инвертора, который косвенным путем производит коррекцию в соответствии с (3) достаточно просто осуществляется аппаратными средствами специализированных цифровых сигнальных процессоров [3]. Суть метода состоит в коррекции рассчитанных значений длительностей включения TAon ,TBon ,TCon перед их загрузкой в соответствующие регистры сравнения CMPRk таймера ШИМ. Коррекция осуществляется по следующему закону, основанному на знаке тока: t TimerClock если i k 0 на протяжении T, то CMPRi c CMPRi 2 t TimerClock если i k 0 на протяжении T, то CMPRi c CMPRi 2 если i k изменяет знак на протяжении T, то CMPRi c CMPRi где TimerClock это частота таймера применяемого для формирования ШИМ, i 1,2,3 . 3. Экспериментальные исследования. Тестирование алгоритма компенсации мертвого времени (АКМВ) выполнено на специально сконфигурированном экспериментальном образце асинхронного электропривода в режиме частного и векторного бездатчикового управления с двигателем мощностью 2.2 кВт. Программная реализация алгоритмов управления АД, векторной ШИМ, алгоритма компенсации мертвого времени выполнена на унифицированном контроллере на основе цифрового сигнального процессора TMS320LF2406A. Графики фазных токов АД на холостом ходу при частотном управлении на скорости 10 рад/с (частота выходного напряжения инвертора 3.14 Гц) при частотах коммутации fPWM=10 кГц и fPWM=2.5 кГц показаны на Рис.1 и Рис.2 соответсвенно. Для нескомпенсированного мертвого времени величиной 4.2 мкс и fPWM=10 кГц амплитуда фазного тока двигателя составляет 0.8 А, в то время как при отсутствии мертвого времени амплитуда тока равна 3.5 А. При включенном алгоритме компенсации мертвого времени амплитуда фазного тока составляет 2.8 А, форма тока статора имеет искаженную форму, но более близкую к синусоиде, чем в случае, когда компенсация мертвого времени отключена. Как следует из экспериментальных осциллограмм, при уменьшении частоты коммутации влияние МВ на выходной ток инвертора уменьшается и при частоте 37 Доповіді за метеріалами Міжнародної науково-технічної конференції молодих учених, аспірантів і студентів. Сучасні проблеми елетроенерготехніки та автоматики. – Київ: «Політехніка», 2009. – 453 с. СЕКЦІЯ 5: АВТОМАТИЗАЦІЯ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ ТА ЕЛЕКТРОПРИВОД A A A A fPWM=2.5 кГц алгоритм компенсации мертвого времени обеспечивает качественную форму выходного тока, а также корректную его амплитуду, которая составляет 3.5 А. В результате исслеТок фазы а без компенсации, Ток фазы а с компенсацией дования установлено, что 4 4 точность отработки угловой 2 2 скорости при использовании 0 0 алгоритма бездатчикового -2 -2 управления [4] с компе-4 -4 нсацией мертвого времени 0 0.2 0.4 0.6 0.8 t, s 0 0.2 0.4 0.6 0.8 t, s существенно выше, по Рисунок 1 Ток фазы а без компенсации, Ток фазы а с компенсацией сравнению со случаем, когда 4 4 МВ нескомпенсировано. 2 2 Также следует отметить 0 0 более низкий уровень -2 -2 высокочастотных пульсаций -4 -4 в моментной составляющей 0 0.2 0.4 0.6 0.8 t, s 0 0.2 0.4 0.6 0.8 t, s тока статора при наличии Рисунок 2 компенсации мертвого времени. При снижении скорости ниже 15 рад/с (10% от номинального значения) и отсутствии компенсации МВ алгоритм бездатчикового управления АД становится неустойчивым. В тоже время минимальная скорость, на которой алгоритм бездатчикового управления позволяет отрабатывать ступенчатый номинальный момент нагрузки с компенсацией мертвого времени составляет 5 рад/с (3% от номинального значения). Вместе с расширением диапазона регулирования применение АКМВ позволяет повысить точность отработки задания угловой скорости. Заключение. В результате проведенных исследований было экспериментально доказано, что приемлемая компенсация мертвого времени достигается благодаря использованию достаточно простого алгоритма коррекции расчетных значений длительностей в алгоритме векторной ШИМ, предложенного группой Siemens [2]. Полной компенсации при этом не достигается, однако полученные характеристики преобразователя не уступают существующим у изделий ведущих мировых производителей. Перечень ссылок 1. J.Holtz. Pulse-width modulation – A survey // IEEE Trans on Industrial Electronics. – 1992. – Vol.39. – no 5. – P.410-420 2. Weschta, W. Weberskirch, Siemens AG, E STE 14, Postfach 32 20, D-8520 Erlangen, F.R.G. NonLinear behaviour of voltage source inverters with power transistors // Proc. of EPE 89, Aachen. – 1989. – P.533-537. 3. Пересада С. М., Ковбаса С. Н., Митрофанов А. М. Унифицированный контроллер на основе DSP TMS320LF2407 для электроприводов переменного тока. // Вестник Национального технического университета „ХПИ”. – 2001. – Вып. 10. – С. 271-274. 4. Montanari M., Peresada S. and Tilli A. A speed-sensorless indirect field-oriented control for induction motors based on high gain speed estimation // Automatica. –2006. – Vol. 42. – P. 1637-1650. 38