влияние приводного двигателя системы динамического
реклама

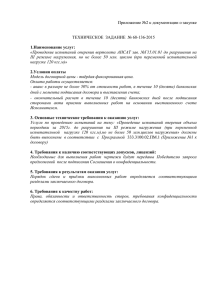
ЕНЕРГЕТИКА ТА ЕНЕРГОРЕСУРСОЗБЕРЕЖЕННЯ УДК 621.313.323 ВЛИЯНИЕ ПРИВОДНОГО ДВИГАТЕЛЯ СИСТЕМЫ ДИНАМИЧЕСКОГО НАГРУЖЕНИЯ НА НАПРЯЖЕНИЕ ПИТАНИЯ Козак О.А., ассист. Кременчугский государственный университет имени Михаила Остроградского ул. Первомайская, 20, 39600, г. Кременчуг, Украина E-mail: [email protected] В данной работе приведен анализ источников питания для систем динамического нагружения машин постоянного тока. Исследованы особенности влияния на приводной двигатель переменного момента, создаваемого системами испытания, а также влияние вынужденных колебаний приводного синхронного двигателя на напряжение питающей сети. Ключевые слова: динамическое нагружение, приводной двигатель, питающая сеть. Введение Электрические машины, которые входят в состав электроприводов, являются неотъемлемой частью большинства технологических механизмов любой области промышленности. Рост количества повторных отказов электрических машин, которые после ремонта вернулись в технологический процесс, объективно указывает на необходимость определения нового паспорта отремонтированной электрической машины и на составление рекомендаций по дальнейшему ее использованию. Такие рекомендации могут быть составлены в ходе послеремонтных испытаний с реализацией нагрузки, отвечающей конкретному технологическому процессу. Существующие в электроремонтных цехах системы статического нагружения имеют ряд существенных недостатков: несоответствие испытаний реальным эксплуатационным условиям, длительность подготовки испытаний и их дороговизна и т.п., что объективно обуславливает применение для испытаний систем динамического нагружения [1]. Цель работы. Анализ особенностей влияния систем динамического нагружения машин постоянного тока на качественные показатели питающей сети. Анализ предыдущих исследований. Реализация систем динамического нагружения может быть осуществлена с использованием управляемых преобразователей напряжения в якорных цепях и цепях возбуждения. В качестве преобразователей традиционно используют полупроводниковые малоинерционные тиристорные или транзисторные преобразователи напряжения. При использовании таких преобразовательных приборов их КПД достаточно велик, что позволяет, в отличие от систем Г-Д, сократить потребление энергии и снизить потери в преобразовательном агрегате [2]. Однако такое существенное преимущество необходимо оценивать с учетом негативных особенностей полупроводниковых преобразователей. Такие явления имеют место как внутри электропривода, в результате влияния формы напряжения и его импульсного характера на коммутационные процессы и на работу двигателя постоянного тока в целом, что снижает достоверность результатов проведенных испытаний, так и в системе электроснабжения, в результате дискретного принципа управления преобразователями, несинусоидальности напряжения и токов, которые вызывают сдвиг потребляемого из сети тока и искажение его формы. Возникающие при этом реактивные токи, протекая по сопротивлениям питающей сети, вызывают дополнительные потери активной мощности, а высшие гармоники при увеличении мощности испытуемых двигателей вызывают недопустимые искажения напряжения сети, нарушающие нормальную работу других потребителей. Мощность питающей сети в электроремонтных цехах не превышает 5000 кВА. Это свидетельствует о том, что применение схем с преобразователями напряжения делает невозможным испытания двигателей большой мощности, так как мощность преобразователя в таком случае будет соизмеримой с мощностью питающей сети, что, в свою очередь, приводит к недопустимым искажениям напряжения сети. Применение конденсаторных батарей для компенсации реактивной мощности при резонансных явлениях, вызванных высшими гармониками тока, приводит к быстрому выходу из строя конденсаторных батарей. Это обуславливает применение фильтро-компенсирующих устройств (ФКУ), настроенных на компенсацию высших гармоник. Управление ФКУ требует наличия еще одного преобразователя, который может превышать мощность основного в несколько раз [3]. Рисунок 1 – Система нагружения с преобразователем напряжения Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 3 112 ЕНЕРГЕТИКА ТА ЕНЕРГОРЕСУРСОЗБЕРЕЖЕННЯ Для снижения отмеченных недостатков целесообразно использовать для систем нагружения схемы на базе Г-Д с приводным двигателем. Такой вариант обеспечивает постоянное напряжение на выходе генератора без пульсаций, что значительно улучшает коммутационные процессы при проведении испытания. Формирование режимов нагружения в таких схемах возможно путем управления дополнительным сопротивлением обмотки возбуждения генератора с любым типом возбуждения. Однако системы нагружения по схеме ПД-Г-Д имеют низкий КПД по сравнению с преобразователями напряжения из-за тройного преобразования энергии. Этот недостаток может быть значительно снижен применением управляемых преобразователей в цепях возбуждения с большим коэффициентом форсирования, что позволяет обеспечить точность и быстродействие системы Г-Д. Недостатками данных схем являются большие массогабаритные показатели, большая потребность в меди и электротехнической стали [2]. В качестве приводного двигателя систем нагружения может быть использован синхронный и асинхронный двигатели. Применение асинхронного двигателя при изменении скорости генератора вводит в контур преобразования мощности маховые массы асинхронного двигателя и генератора, которые позволяют снизить толчки активной мощности, циркулирующей между испытуемым двигателем и сетью. Это явление весьма позитивно, поскольку позволяет выбирать приводной двигатель по перегрузке, близкой к статической. Однако большие колебания скорости асинхронного двигателя делают невозможным реализацию нагружения с применением в системах генераторов с самовозбуждением. Рисунок 2 – Система нагружения на базе ГПТ с приводным синхронным двигателем Синхронный двигатель (СД) обеспечивает постоянную скорость вращения, однако применение его в качестве приводного для систем динамического нагружения с электромашинным преобразователем имеет ряд особенностей. На валу СД при испытаниях машин постоянного тока присутствуют три составляющие момента: момент потерь, момент, изменяющийся с частотой воздействия на якорь испытуемого двигателя, и момент с удвоенной частотой, которые можно выразить через изменение мощности генератора постоянного тока [2]: P M cд = г , ω0 где ω 0 - угловая скорость синхронного двигателя, Рг - мощность генератора постоянного тока, которая может быть представлена в виде: P = ( E0 + Em ⋅ sin( Ω t )) ⋅ ( I0 + I m ⋅ sin( Ω t + φm )) , где E 0 , I 0 - постоянные составляющие ЭДС и тока генератора при нагружении, E m , I m - переменные составляющие ЭДС и тока при нагружении, Ω частота нагружения двигателя постоянного тока. Тогда момент, создаваемый генератором при гармоническом воздействии, будет равен: 1 Mc = ⋅ ( E0 I0 + Em I0 ⋅ sin( Ω t ) + E0 I m ⋅ sin( Ω t ) + ω0 + Em I m ⋅ sin 2 ( Ω t )) = M 0 + M 1 sin( Ω t ) + M 2 sin( 2Ω t ). Такие резкие изменения момента на валу синхронного двигателя могут приводить к изменениям угла выбега ротора машины θ , что в свою очередь приводит к вынужденным колебаниям синхронного двигателя, однако параметры нагружения при этом остаются неизменными. Наибольшие отклонения угла вызывает первая гармоника воздействия системы нагружения на приводной синхронный двигатель, что видно из выражения для амплитуды угла выбега ротора при гармоническом воздействии момента на валу СД [3]: ν =m Mν m θ =∑ sin(νΩ t ) , M сн 2 ν =1 2 νΩ M у + (νΩ J − ) νΩ где M vm - величина переменной составляющей момента, создаваемого генератором системы динамического нагружения; M у - успокоительный момент, зависящий от конструктивных особенностей машины и режима ее работы; M cн - синхронизирующий момент СД; J - момент инерции синхронного двигателя и приводимой машины (в случае предложенной системы динамического нагружения – генератор постоянного тока); ν - номер гармоники изменения момента. При некоторой частоте воздействия, близкой к частоте собственных колебаний, возможны резонансные явления, в результате которых момент, развиваемый двигателем, достигает значений, недопустимых с точки зрения динамической устойчивости [4]. В динамическом режиме синхронный двигатель может выпасть из синхронизма. Возможно и такое сочетание параметров, когда компромиссное решение для устранения резонансных явлений в синхронном двигателе и эффективного нагружения машины постоянного тока, является невозможным. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 3 113 ЕНЕРГЕТИКА ТА ЕНЕРГОРЕСУРСОЗБЕРЕЖЕННЯ Частота собственных колебаний синхронной машины лежит в диапазоне от 0,5 до 2 Гц и определятся из выражения: 1 , f0 = J 2π M сн а частота вынужденных колебаний: fν = ν ⋅ f 1 , где ν - номер гармоники колебанияй момента; Ω – частота колебаний первой гармоники f1 = 2π момента; Ω - частота динамического нагружения при испытании двигателя постоянного тока. Наиболее опасной зоной для работы синхронного двигателя является отношение частоты собственных колебаний к вынужденным f0 = 0,8 ÷ 1,2 , в этом случае модуль резонанса fν стремится к бесконечности [4]. Исследования влияния систем испытания двигателей постоянного тока с электромашинным преобразователем на приводной синхронный двигатель показали, что расчетная частота нагружения для машины постоянного тока в большинстве случаев является частотой, близкой к резонансной для синхронного двигателя и вызывает наибольшие отклонения угла выбега ротора. Вынужденные колебания синхронной машины приводят к резким изменениям тока статора приводного двигателя системы динамического нагружения, что является причиной возникновения колебаний напряжения питающей сети. Это явление имеет особое значение в сетях электроремонтных цехов, в силу их ограниченной мощности. Таким образом, возникая в какой-либо точке сети и распространяясь по ней, колебания оказывают отрицательное воздействие на чувствительные к ним электроприемники, в основном на осветительные. Размах колебаний увеличивается со снижением мощности сети, при этом огибающая действующих (среднеквадратичных) значений напряжения смещается вниз относительно номинального значения напряжения сети. Как видно из рис. 3 с увеличением мощности питающей сети, влияние приводного двигателя системы динамического нагружения и возникающие при этом напряжения менее заметны. Значительно снизить влияние приводного двигателя на характеристики питающего напряжения можно путем регулирования возбуждения синхронного двигателя. Рисунок 3 – Огибающая напряжения питания приводного синхронного двигателя: а) Рсети ≈ РСД ; б) Рсети ≈1,3 РСД; в) Рсети ≈ 2 РСД Такое регулирование может быть построено на контроле показателей качества питающего напряжения в допустимых пределах. Таким образом, при возникновении колебаний напряжения, превышающих допустимые пределы, необходимо увеличить ток возбуждения синхронной машины, что даст возможность уменьшить угол выбега ротора и , в свою очередь, снизить колебания напряжения. Выводы. В отличие от схемы ТП-Д, в системах нагружения по схеме СД-Г-Д, за счет введения автоматического регулирования тока возбуждения синхронного двигателя, можно обеспечить отсутствие реактивной мощности, и, как следствие, улучшить характеристики питающей сети. Это неоспоримое достоинство, что делает схемы СД-Г-Д весьма удобными и безопасными с точки зрения влияния на сеть с ограниченной мощностью при испытаниях двигателей большой мощности, но сохраняет недостатки, присущие станциям с электромашинными преобразователями. ЛИТЕРАТУРА 1. Вольдек А.И. Электрические машины. – Л.: Энергия, - 1974. – 840 с. 2. Овчаренко А.С. [Розинский Д.И.] / Повышение эффективности электроснабжения промышленных предприятий. - К.: Техника, 1989. – 287 с. с ил. 3. Родькин Д.И. Системы динамического нагружения и диагностики электродвигателей при послеремонтных испытаниях. – М.: НЕДРА, - 1992. – 236 с. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 3 114 ЕНЕРГЕТИКА ТА ЕНЕРГОРЕСУРСОЗБЕРЕЖЕННЯ 4. Анормальные режимы работы крупных синхронных машин / [Казовский Е.Я., Данилович Я.Б., Катарский Э.Г., Рубисов Г.В]. - Л.: - 1968. – 429 с. 5. Важнов А.И. Переходные процессы в машинах переменного тока. – Л.: Энергия – 1980, - 256 с. с ил. Статья поступила 11.05.10 г. Рекомендована к печати д.т.н., проф. Родькиным Д.И. ВПЛИВ ПРИВОДНОГО ДВИГУНА СИСТЕМИ ДИНАМIЧНОГО НАВАНТАЖЕННЯ НА НАПРУГУ ЖИВЛЕННЯ Козак О.А., асист. Кременчуцький державний університет імені Михайла Остроградського вул. Першотравнева, 20, 39600, м. Кременчуг, Україна E-mail: [email protected] У даній роботі наведено аналіз джерел живлення для систем динамічного навантаження машин постійного струму. Досліджено особливості впливу на приводний двигун змінного моменту, створюваного системами випробування, а також вплив вимушених коливань приводного синхронного двигуна на напругу мережі живлення. Ключові слова: динамічне навантаження, приводний двигун, мережа живлення. EFFECT OF ENGINE TRANSMISSION SYSTEM OF DYNAMIC LOADING ON THE VOLTAGE Kozak O.A., assist. Kremenchug Mikhail Ostrogradskii State University Peschotravneva St., 20, 39600, Kremenchug, Ukraine E-mail: [email protected] This work provides an analysis of power supply systems for dynamic loading machines DC. The features of the influence on the drive motor of variable time, the system tests, as well as the impact of forced oscillations of the synchronous motor drive on the supply network. Key words: dynamic loading, the drive motor, mains supply. Вісник КДУ імені Михайла Остроградського. Випуск 4/2010 (63). Частина 3 115