Тема 4. Сезонные и параметрические модели временных рядов МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
реклама

МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Тема 4. Сезонные и параметрические модели
временных рядов
Целью изучения данной темы является создание базовой основы подготовки менеджеров по
специальности 080507 в области построения моделей различных задач в сфере экономики,
формирования у студентов систематизированного подхода к постановке и решению задач
прогнозирования. Предлагаемый курс позволит специалистам быстрее адаптироваться к
практической работе, лучше ориентироваться в научно-технической информации и литературе
по специальности, увереннее принимать решения, возникающие в работе.
Основными задачами изучения темы являются получение студентами углубленных
теоретических знаний по применению моделей прогноза, приобретение ими устойчивых
навыков выполнения научно-исследовательских работ, умения решать сложные научные
проблемы, связанные с построением моделей, включая и многомерные, способности к
логическому анализу полученных результатов и определению путей поиска приемлемых
решений.
Оглавление
4.1. Сезонные модели .................................................................................................................................... 1
4.2. Параметрические модели временных рядов .............................................................................. 4
4.2.1. Общая линейная модель ............................................................................................................. 4
4.2.2. Модель авторегрессии ................................................................................................................. 5
4.2.3. Модель скользящего среднего ................................................................................................. 8
4.2.4. Смешанные модели ..................................................................................................................... 10
4.2.5. Нестационарные временные процессы .............................................................................. 12
Библиография .................................................................................................................................................. 15
4.1. Сезонные модели
Под сезонностью понимаются систематически повторяющиеся колебания тех или иных
показателей, обусловленные особенностями условий в определенный период. Сезонные
колебания присутствуют во многих экономических и финансовых рядах. Потребление
электроэнергии, газа, продажа определенных видов товаров, активность на финансовых рынках
– все эти ряды в той или иной степени подвержены эффекту сезонности.
Применительно к задачам краткосрочного управления и прогнозирования сезонная
составляющая зачастую не является информативной, т. е. при прогнозе основная проблема
сводится к оценке тенденции, после чего эта оценка корректируется на сезонность. Таким
образом, при анализе прогноза временных рядов необходимо дважды учитывать влияние
сезонности. Во-первых, при оценке тенденции, которая представляет собой ряд, очищенный от
случайной составляющей, и сезонности. Сезонная составляющая в таких случаях лишь
затрудняет идентификацию тех составляющих динамики, которые являются информативными.
Во-вторых, с сезонностью приходится иметь дело при корректировке прогнозных значений.
Существует несколько методик оценки сезонного компонента. Основные отличия их сводятся
к тому, в какой последовательности производить выделение составляющих временного ряда,
какими методами и на каком этапе считать выделение составляющих достаточно точным.
Между компонентами временного ряда существуют специфические функциональные
отношения. В анализе временных рядов принято рассматривать различные формы взаимосвязи:
аддитивную, мультипликативную и смешанную.
В аддитивной форме ряд представляется в виде
x t t st t ,
1
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
где θt – трендовая составляющая; st – сезонный компонент; εt – случайная нерегулярная
составляющая.
Мультипликативная и смешанная модели записываются, соответственно, следующим образом
x t t st ;
x t t st .
Для выделения сезонной составляющей в модели нужно сначала оценить тренд или
краткосрочные колебания. Для выявления тренда рекомендуется использовать метод
центрированного скользящего среднего (ЦСС). Поскольку теоретическое значение при методе
сглаживания скользящим средним определяется для центрального элемента окна, то ширина
окна сглаживания должна быть нечетной. Но период сезонности обычно включает четное число
временных интервалов (12 месяцев, 4 квартала). Для выхода из такой ситуации используется
метод ЦСС, при котором для ежемесячных данных наблюдений крайние месяцы берутся с весом
1, а остальные имеют вес, равный 2.
Алгоритм расчета сезонного индекса можно представить в виде следующих итераций:
Исходный ряд сглаживается методом ЦСС.
Рассчитывается разница между исходными данными и центрированными средними, т. е.
отклонения, которые и представляют собой эффект сезонности.
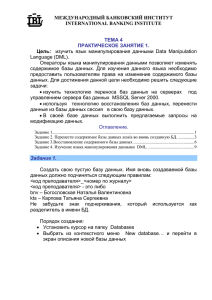
Удобный путь анализа сезонных вариаций предоставляют статистические пакеты. В качестве
примера рассмотрим выявление сезонного компонента с помощью пакета Statistica при анализе
ежемесячных данных пассажирских авиаперевозок Великобритании за 12-летний период. (Файл
с этими данными находится в указанном пакете).
На рис. 4.1 показан исходный ряд, откуда видно наличие периодических пиков, связанных с
ежегодными отпусками.
Рис. 4.1. График ежемесячных авиаперевозок
Рис. 4.2 показывает трендовую
выраженного растущего тренда.
составляющую,
2
свидетельствующую
о
наличии
явно
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Рис. 4.2. Трендовая составляющая
На рис. 4.3 показана сезонная составляющая, откуда видна периодичность процесса с
величиной периода, равной 12 месяцам.
Рис. 4.3. Сезонная составляющая
Кроме того, в модели можно выделить нерегулярный случайный компонент, который показан
на рис. 4.4.
Отметим, что прогнозирование временных рядов, имеющих сезонную составляющую, к тому
же отягощенных наличием тренда, представляет собой достаточно сложную задачу и требует
более сложных моделей описания рядов, о чем будет сказано ниже.
3
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Рис. 4.4. Нерегулярная составляющая
4.2. Параметрические модели временных рядов
Общая модель стационарного временного ряда имеет скорее теоретическое, чем
практическое значение, так как ее трудно обрабатывать. Для практических целей обычно
используются более частные модели, описываемые небольшим числом параметров.
Выбор моделей с малым числом параметров обусловлен необходимостью их дальнейшего
оценивания на траектории ряда. Среди таких параметрических моделей стационарных
временных рядов наиболее распространенными являются модели авторегрессии, скользящего
среднего и смешанные модели, которые детально обсуждаются ниже. Все эти модели являются
частными случаями общей линейной модели (ОЛМ) временного ряда [2,3], которую рассмотрим
более подробно.
4.2.1. Общая линейная модель
В основе определения этой модели лежит понятие белого шума. Под этим термином
понимается последовательность at независимых одинаково распределенных случайных величин
с конечной дисперсией σ2a=Dat (величины at часто называют случайными импульсами или
возмущениями). Далее положим без ограничения общности, что их среднее значение m = Mat =
0; в противном случае просто надо перейти к a't = at – m. Из этого определения следует, что
белый шум является стационарным временным рядом, для которого автоковариация Rk = 0 при
k ≠ 0. Так как автоковариация связана со спектральной плотностью преобразованием Фурье, то
для процесса at спектральная плотность постоянна и равна
f ( ) a2 (2 ) , [ , ].
Определим ОЛМ временного ряда yt, -∞ < t < ∞ как линейную комбинацию текущего и
прошлых значений импульсов at:
t
j 0
j
yt at 1at 1 2 at 2 ... j at j t j a j , 0 1.
(4.1)
Если ввести оператор сдвига на один шаг назад В: Вat = at-1, то символически уравнение
(4.1) можно записать как
4
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
y t ( B )at ,
где
линейный
оператор
(4.2)
( B) 1 1 B 2 B 2 ...
называется
фильтром.
Таким
образом, можно сказать, что ОЛМ получается из белого шума с помощью линейного фильтра,
В теории ОЛМ предполагается также дополнительное условие обратимости:
( B) 0 при
B 1,
где вместо В допускается подстановка комплексных чисел. Из этого условия следует
существование обратного оператора
( B ) 1 ( B ) 1 1 B1 2 B2 ... 1 B j .
j 1
Для обратимого процесса из (4.2) имеем:
at ( B ) yt yt 1 yt 1 2 yt 2 ...,
т. е. значение импульса at является в свою очередь линейной комбинацией настоящего и
прошлых значений yt. Последнее соотношение можно переписать в виде
yt ( 1 yt 1 2 yt 2 ...) at yt at .
*
(4.3)
Таким образом, для обратимой ОЛМ текущее значение процесса является линейной
комбинацией всех его прошлых значений плюс случайное возмущение at. Тем самым
составляющую yt* в формуле (4.3) можно трактовать как линейный предиктор (от англ. слова to
predict - предсказывать) для yt по всем прошлым значениям временного ряда, а слагаемое at –
как случайную ошибку этого предиктора.
Форма ОЛМ очень удобна для прогнозирования будущих значений временного ряда, если
известны все прошлые значения.
В общем виде задача ставится следующим образом: построить оптимальный линейный
предиктор (прогноз) yt*(k) для будущего значения yt+k, k≥1 рассматриваемого временного ряда
(4.1), предполагая, что известны все значения yτ при τ<t. Про такой прогноз говорят, что он
делается в момент t с упреждением k.
4.2.2. Модель авторегрессии
Представления ОЛМ в виде (4.1) или (4.3) не являются практически полезными, если они
содержат неограниченное число параметров ψj и πj. Класс простых моделей с конечным числом
параметров получается в предположении, что обращенная форма ОЛМ (4.3) содержит конечное
число членов.
Рассмотрим частный случай выражения (4.3), в котором положим, что только первые р весов
ненулевые, т. е. πk = 0 при k > p. Запишем полученное при этом уравнение (4.3), введя в него
новые обозначения коэффициентов, в виде
yt 1 yt 1 2 yt 2 ... p yt p at .
(4.4)
Полученный процесс называется процессом авторегрессии порядка р или сокращенно АР(р).
Такое название объясняется тем, что линейная модель вида
F c1 x1 c2 x2 ... cr xr ,
связывающая «зависимую» переменную F с множеством «независимых» переменных x1, х2,..., хr
плюс случайная «ошибка» ε обычно называется моделью регрессии: говорят, что F
регрессирует на x1, х2,..., хr. В равенстве (4.4) переменная yt регрессирует на свои
предшествующие значения, поэтому модель называется авторегрессионной.
С помощью оператора сдвига модель (4.4) можно записать в эквивалентной форме
5
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
(1 1 B 2 B 2 ... p B p ) y t at или
( B ) yt at .
Определенный в последнем равенстве оператор Ф(В) называется оператором авторегрессии.
Исходя из приведенных выражений, авторегрессионный процесс можно охарактеризовать
как модель, в которой текущее значение ряда в момент t выражается через конечное число
прошлых значений (систематическая зависимость от прошлых значений) и величину
возмущения at, которое не зависит от прошлого.
Авторегрессионные модели являются исключительно полезными для описания многих
встречающихся на практике временных рядов. В частности, они пригодны (и первоначально
были созданы) для описания случайных систем, обладающих по аналогии с механикой
инерцией и подверженных действию сил, возвращающих систему в состояние равновесия. Так,
модели второго порядка (р =2) оказались очень хорошими при описании поведения систем
приблизительно циклической природы, прообразом которой может служить маятник,
подвергаемый воздействию малых случайных импульсов.
Большое практическое значение имеют процессы авторегрессии первого (р =1) и второго (р
=2) порядков, которые определяются следующими выражениями
yt 1 yt 1 at ,
yt 1 yt 1 2 yt 2 at .
(4.5)
Более детально рассмотрим процесс АР(1). Первое из уравнений (4.5) можно переписать с
помощью оператора сдвига в виде
(1 B ) yt at .
(4.6)
Из (4.6) следует, что
yt (1 B ) 1 at (1 j B j )at at at 1 2 at 2 ....
j 1
Отсюда видно, что yt зависит от at и предшествующих величин импульсов, причем
зависимость от прошлых значений убывает геометрически. Автокорреляция этого процесса
удовлетворяет соотношению
k k 1 ,
которое при
k 0,
ρ0=1 имеет решение
k k ,
k 0.
Таким образом, здесь автокорреляция экспоненциально затухает до нуля монотонно при Ф>0
и меняет знак при Ф<0.
Частная автокорреляция этого процесса имеет конечную протяженность и обрывается на
задержке р, т. е. частная корреляция между yt и yt-k исключает влияние промежуточных
переменных. Это следует из того факта, что согласно определению (4.4) yt не зависит от yt-k при
k > p. Указанное свойство характерно для модели АР(р) и может использоваться при
идентификации процесса.
Рассмотрим проблему прогнозирования в общей модели АР(р). Так как в этой модели текущее
значение
процесса
выражается
лишь
через
р
предшествующих
значений
(плюс
некоррелированное с ними случайное возмущение с нулевым средним), то представление (4.4)
сразу дает форму предиктора (прогноза) на один шаг вперед, если известны n≥p
предшествующих значений процесса
yˆ t 1 (1) Ф1 yt 1 Ф2 yt 2 Ф p yt p .
6
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
(будущие значения at заменяются нулем). Если необходимо рассчитать прогноз на большее
число шагов вперед, например, спрогнозировать yt+1, то поскольку
yt 1 1 yt 2 yt 1 ... p yt 1 p at 1 ,
соответствующий предиктор получается отсюда заменой yt на его оценку
yt 1 (1) ,
а
возмущения at+1 – нулем, в результате чего имеем
yt 1 (2) 1 yt 1 (1) 2 yt 2 ... p yt 1 p
и т. д. Таким образом, авторегрессионные модели очень удобны при построении прогноза:
здесь уже построенные прогнозные значения используются в авторегрессионном уравнении с
увеличением упреждения прогноза для построения следующего прогнозного значения. В
частности, для модели АР(1) имеем следующие соотношения:
yt (1) yt ,
yt (2) yt (1) 2 y t , . . . , yt (k ) k yt ,
откуда видно, что по наблюдению yt легко прогнозируются будущие значения процесса.
Проиллюстрируем использование авторегрессионной модели с помощью пакета Statgraphics
[4]. Воспользуемся данными из пакета и попытаемся спрогнозировать некоторую величину на 6
шагов вперед моделью АР(1). Отметим, что в англоязычном пакете название авторегрессионной
модели записывается как Autoregression или сокращенно AR (р). Кроме того, рассматриваемая
модель является частным случаем более общей модели ARIMA (об этом будет сказано ниже),
поэтому сокращенная запись авторегрессионной модели посредством английской аббревиатуры
имеет вид: ARIMA (p,0,0).
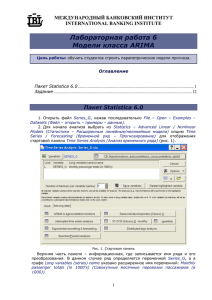
На рис. 4.5 показан график прогноза, построенного с помощью модели АР(1)=ARIMA (1,0,0).
Рис. 4.5. График прогноза моделью АР(1)
На рис. 4.6 приведен график остатков. Анализ графика показывает, что выбранная модель
АР(1)= ARIMA (1,0,0) не в полной мере отвечает наблюдаемым данным: в начале и конце
диапазона имеются отклонения от нормального закона, поэтому не исключается версия о
другой, более адекватной модели.
Рис. 4.6. График остатков
7
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
В табл. 4.1 приведены результаты расчета, позволяющие построить модель АР(1).
Таблица 4.1
Результаты расчета модели
Прогнозные значения на следующие 6 временных интервалов приведены в табл. 4.2 (второй
столбец) вместе с верхним (третий столбец) и нижним (четвертый столбец) доверительными
интервалами.
Таблица 4.2
Результаты прогноза
4.2.3. Модель скользящего среднего
Простой класс моделей временных рядов с конечным числом параметров получается, если
предположить, что ОЛМ (4.1) содержит лишь конечное число членов. Пусть Ψk=0 при k>q и
запишем соответствующий процесс в виде
yt at 1at 1 ... q at q ,
(4.7)
где символы –θ1,..., –θq используются для обозначения конечного набора весовых параметров.
Соотношение (4.7) определяет процесс скользящего среднего порядка q, или сокращенно
СС(q), который представляет собой линейную комбинацию текущего и прошлых значений
импульсов at.
Используя оператор сдвига, можно записать для процесса (4.7) эквивалентное выражение
yt (1 1 B ... q B q )at ( B)at .
(4.8)
Из равенства (4.8) следует, что процесс скользящего среднего можно трактовать как выход yt
линейного фильтра с передаточной функцией θ(B), на вход которого поступает белый шум at.
Можно показать [2], что для модели СС(q) автокорреляция обрывается на задержке q, и
конечная протяженность автокорреляции является характерным свойством этой модели.
Рассмотрим теперь проблему прогнозирования в модели СС(q). Если известны все значения yt
при τ < t, то общий предиктор (прогноз) ŷ t (k) для прогнозирования yt+k с учетом равенств Ψj =
-θj , j=1,..., q,
Ψj =0 при j > q принимает вид
( k at ... q at k q )
yt (k )
0, при k q.
8
при k q,
(4.9)
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Таким образом, в модели СС(q) прогноз возможен максимум на q шагов вперед.
Для практики особо важны процессы скользящего среднего первого (q =1) и второго (q=2)
порядков, которые имеют следующий вид
yt at 1at 1 ,
yt at 1at 1 2 at 2 .
Более подробно рассмотрим процесс СС(1), который выражается первым из выше
приведенных равенств. Для прогноза на один шаг вперед, т. е. при q = 1, получаем что ŷ t (1)=
- θkat,
ŷt
(k)=0 при k>1.
Отметим теперь взаимность процессов АР(1) и СС(1). В то время как автокорреляционная
функция процесса СС(1) обрывается после задержки, равной 1, автокорреляционная функция
процесса АР(1) экспоненциально затухает с ростом задержки. Можно также показать [2], что
справедливо и обратное утверждение, а именно: в то время как частная автокорреляционная
функция процесса СС(1) затухает и имеет доминирующим членом затухающую экспоненту,
частная автокорреляционная функция процесса АР(1) обрывается после задержки, равной 1.
Аналогичная приближенная зависимость имеет место и в общем случае.
Проиллюстрируем использование модели скользящего среднего с помощью пакета
Statgraphics. Воспользуемся данными из пакета и попытаемся спрогнозировать некоторую
величину на 2 шага вперед моделью СС(1). В связи с изложенным выше, прогноз должен
обрываться на втором шаге, так как используется модель СС(1). Отметим, что в англоязычном
пакете название этой модели записывается как Moving Averading или сокращенно MA (q).
Рассматриваемая модель является частным случаем более общей модели ARIMA, и сокращенная
запись модели скользящего среднего посредством английской аббревиатуры имеет вид: ARIMA
(0,0, q).
На рис. 4.7 показан график прогноза, построенного с помощью модели СС(1)= ARIMA (0,0,1).
Рис. 4.7. График модели СС(1) с прогнозом на 2 шага вперед
Из графика видно, что модель СС(1) хуже, чем модель АР(1) описывает наблюдаемые данные
(файл данных одинаков для обоих случаев), и, следовательно, является менее подходящей для
получения прогнозных характеристик. Тем не менее, в целях полного представления о
возможностях различных моделей в задаче прогнозирования приведем таблицу прогнозных
оценок (табл. 8).
Таблица 4.3
Результаты прогноза
9
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Из табл. 4.3 видно, что прогноз, как и следовало ожидать, обрывается после первого шага,
так как применяется модель СС(1).
4.2.4. Смешанные модели
Моделями АР(р) и СС(q) за счет выбора их порядков р и q можно удовлетворительно
описывать многие реальные процессы. Однако на практике для достижения большей гибкости в
подгонке моделей к наблюдаемым временным рядам иногда бывает целесообразным
объединить в одной модели и авторегрессию, и скользящее среднее. При этом цель должна
состоять в построении наиболее экономных моделей, дающих хорошую аппроксимацию с
помощью небольшого числа параметров. Достижению этого помогает рассмотрение смешанных
моделей авторегрессии - скользящего среднего, т. е. моделей АРСС (р, q), которые имеют
следующий вид
yt 1 yt 1 ... p yt p at 1at 1 ... q at q ,
(4.10)
или в другой эквивалентной форме через операторы
( B ) y t ( B )at ,
где
(4.11)
Ф(B), θ(B) - операторы, определенные ранее для моделей АР(р) и СС(q).
Такая модель может оказаться полезной, например, когда наблюдаемый временной ряд
является суммой двух или более независимых составляющих, каждая из которых описывается
либо моделью АР, либо моделью СС, но которые непосредственно не наблюдаются.
В простейшем случае для модели АРСС(1,1) из (4.10) имеем
yt 1 yt 1 at 1at 1 .
Рассмотрим проблему прогнозирования в модели АРСС(р, q). Пусть требуется построить
прогноз y t (k ) для yt+k, k≥1 по всем наблюдениям yτ, τ≤t. Тогда по выражению (4.10) получим
yt k 1 yt k 1 ... p yt k p 1at k 1 ... q at k q at k .
(4.12)
В общем случае в правой части уравнения (4.12) могут присутствовать как будущие
(неизвестные) значения yt+j, 1 ≤ j < k, которые должны быть заменены их предикторами y t ( j ) ,
так и значения yt-j, j ≥ 0, известные к моменту t (они остаются без изменения). Аналогично,
если присутствуют значения at-j, j ≥ 0 (что имеет место лишь при k≤q), то они как функции
известных значений yτ, τ≤t также известны и должны быть оставлены без изменений. Все же
будущие значения at-J, j ≥ 1 должны быть заменены нулями.
Формально эти операции могут быть записаны с помощью условного математического
ожидания,
Z
t
поскольку
yt (k ) M ( yt k y , t) .
Обозначив
для
краткости
M ( Z y , t) , можно получить такое представление
yt (k ) 1[ yt k 1 ]t ... p [ yt k p ]t 1[at k 1 ]t ... q [at k q ]t ,
где надо учесть, что
при j≥0
[ yt j ]t yt j
при j≥1
и [at j ]t at j ;
[ yt j ]t yt ( j ); [at j ]t 0.
Таким образом, при k > q прогноз y t (k ) непосредственно от значений импульса не зависит и
имеет вид
yt (k ) 1[ yt k 1 ]t ... p [ yt k p ]t ,
10
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
а при k ≤ q
yt (k ) 1[ yt k 1 ]t ... p [ yt k p ]t k at ... q at k q .
В частности, при прогнозе на 1 и 2 шага (k =1; 2) получим
yt (1) 1 yt ... p yt 1 p 1at ... q at 1q .
yt (2) 1 yt (1) 2 yt ... p yt 2 p 2 at ... q at 2q
и т.д.
В качестве примера найдем прогноз для модели АРСС(1,1). В соответствии с последними
формулами имеем
yt (1) 1 yt 1at ;
yt (k ) 1 yt (k 1), k 2.
Проиллюстрируем нахождение прогнозных характеристик с помощью пакета Statgraphics. На
рис.4.8 показан временной ряд параметра weight, взятого из пакета на 30 шагах наблюдения, и
прогноз на 6 шагов вперед. Отметим, что в этом пакете английская аббревиатура этой модели
записывается как ARIMA (1,0,1).
Рис.4.8. График временного ряда и прогноза моделью АРСС(1,1)
Результаты прогноза приведены в табл. 4.4.
Таблица 4.4
Прогноз моделью АРСС(1,1)
В табл. 4.3 вместе со значениями прогноза приведены доверительные интервалы.
В адекватной модели остатки должны быть близки к нормальному закону, что можно
проверить по графику остатков, выполненному на вероятностной шкале (см. рис. 4.9).
Рис. 4.9. График остатков
11
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Из приведенного графика видно, что модель АРСС(1,1) не в полной мере адекватна
наблюдаемым данным.
4.2.5. Нестационарные временные процессы
Рассмотренные выше модели стационарных временных рядов образуют важный для
приложений класс моделей, основанных на предположении, что процесс остается в равновесии
относительно постоянного среднего уровня. Однако многие ряды в различных областях (таких,
как индустрия, экономика, коммерция) обнаруживают нестационарный характер, в частности,
не имеют фиксированного среднего. Тем не менее, их свойства могут быть в некотором смысле
однородными. Например, хотя уровень, относительно которого происходят флуктуации, может
быть разным в различные значения времени, поведение ряда на разных отрезках с учетом
различий в уровне оказывается во многом сходным.
Существует неограниченное число различных проявлений нестационарности. Однако можно
выделить обширный класс встречающихся в приложениях временных рядов со специфической
однородной нестационарностью, которая удовлетворительно описывается стохастической
моделью, являющейся модифицированной формой модели АРСС. Такая модель известна в
литературе как модель Бокса-Дженкинса [2].
Условие стационарности модели (4.11) означает, что корни полинома Ф(В) лежат вне
единичного круга. Естественный путь получения нестационарного процесса, описываемого
таким же уравнением, заключается в ослаблении этого ограничения. В частности, оказывается,
что во многих случаях наблюдаемые в реальности процессы хорошо описываются моделями
типа (4.11), у которых один или несколько корней Ф(В) равны единице. Такой класс моделей
называется процессами авторегрессии - проинтегрированного скользящего среднего (АРПСС).
Рассмотрим модель
( B ) y t ( B )a t ,
(4.13)
где в отличие от равенства (4.11) φ(В) - нестационарный оператор авторегрессии порядка p+d,
такой, что d корней уравнения φ(В) = 0 равны единице, а остальные р корней лежат вне
единичного круга; оператор же скользящего среднего θ(В) по-прежнему имеет вид (4.8), т. е.
обладает порядком q и является обратимым (все его корни лежат вне единичного круга).
Тогда можно записать, что
( B ) ( B )(1 B ) d ,
где Ф(В) - уже стационарный порядка р оператор авторегрессии (т. е. с корнями вне единичного
круга).
Если ввести оператор разности
( B ) y t ( B ) at
d
1 B,
yt yt yt 1 ,
то
φ(В)
запишется как
и модель (4.13) можно представить в виде
( B)d yt ( B)at .
(4.17)
Здесь d-я разность ряда {уt} вычисляется по формуле
wt d yt (1 B)d yt ,
и, следовательно, удовлетворяет уравнению
( B ) wt ( B )at ,
(4.18)
т. е. является уже стационарным обратимым процессом АРСС(p, q).
12
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Таким образом, процесс {уt}, описываемый уравнением (4.17), можно получить d-кратным
суммированием (или интегрированием) процесса {w}, являющегося согласно (4.18) процессом
АРСС. Вследствие этого процесс, задаваемый моделью (4.17), называют процессом АРПСС
(добавляя к АРСС термин проинтегрированный (П)). В английской аббревиатуре такой процесс
запишется как ARIMA (с добавлением к уже известному сокращению ARMA слова Integrated).
Если в формуле (4.17) оператор авторегрессии Ф(В) имеет порядок р, а оператор скользящего
среднего θ(В) - порядок q, то кратко модель (4.17) записывается как АРПСС (p, d, q). В
частности, при d = 0 эта более общая модель сводится к смешанной модели APCC (p, q). Тем
самым модель АРПСС охватывает широкий класс как стационарных (при d=0), так и
нестационарных (при d ≥ 1) процессов. На практике d обычно равно 0, 1 или максимум 2.
Как отличительную особенность, укажем, что в моделях ARIMA независимые переменные не
используются. Для прогнозирования в этих моделях используется информация, содержащаяся в
самих исходных рядах.
Приведем в качестве примеров наиболее часто встречающиеся на практике частные случаи
нестационарных моделей (при d ≥ 1).
1. Процесс (0,1,1):
yt at at 1 (1 B)at .
Эта модель может быть описана и в таком виде
yt yt 1 at at 1 .
2. Процесс (0,2,2):
2 yt (1 1 B 2 B 2 ) yt
или через предшествующие значения уt и at как
yt 2 yt 1 yt 2 at 1at 1 2 at 2 .
3.
Процесс (1,1,1):
(1 B)yt (1 B)at
или
yt yt 1 yt 1 yt 2 at at 1 .
В заключение рассмотрим использование модели АРПСС в задаче прогнозирования с
помощью пакета Statgraphics. На рис.4.10 приведен график исходного временного ряда из 30
точек для параметра weight и прогноз на 6 шагов вперед, полученный посредством модели
ARIMA (1,1,1). Из графика видно, что подобранная кривая достаточно хорошо описывает точки
наблюдений за исключением завершающих ряд точек, в чем можно убедиться по графику
рис.4.11, где изображены остатки (разности между реальными данными и смоделированными
значениями).
Рис. 4.10. Временной ряд и его прогноз моделью ARIMA (1,1,1)
13
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Рис. 4.11. Остатки на вероятностной шкале
Результаты прогноза вместе с доверительными границами представлены в табл. 4.5.
Таблица 4.5
Результаты прогноза
В завершение рассмотрения параметрических моделей в задачах прогнозирования приведем
схему этих моделей (рис. 4.12).
Рис. 4.12. Параметрические модели
14
МЕЖДУНАРОДНЫЙ БАНКОВСКИЙ ИНСТИТУТ
INTERNATIONAL BANKING INSTITUTE
Библиография
1. Басовский Л. Е. Прогнозирование и планирование в условиях рынка. – М.: Инфра - М,
2003.
2. Бокс Дж., Дженкинс Г. Анализ временных рядов. Вып. 1. Прогноз и управление. – М.:
Мир, 1974.
3. Боровиков В. П., Ивченко Г. И. Прогнозирование в системе Statistica в среде Windows. –
М.: Финансы и статистика, 1999.
4. Дюк В. Обработка данных на ПК в примерах. – СПб.: Питер, 1997.
5. Ивченко Б. П., Мартыщенко Л. А., Иванцов И. Б. Информационная микроэкономика.
Часть 1. Методы анализа и прогнозирования. – СПб.: Нордмед-Издат, 1997.
6. Кричевский М. Л. Введение в искусственные нейронные сети: Учеб. пособие. – СПб.:
СПб. Гос. Морской техн. ун-т, 1999.
7. Сошникова Л. А., Тамашевич В. Н., Уебе Г. и др. Многомерный статистический анализ в
экономике. – М.: Юнити-Дана, 1999.
15