ИДЗ № К4x
реклама

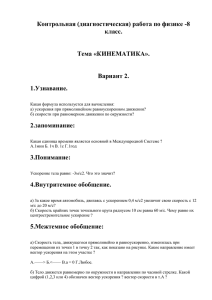
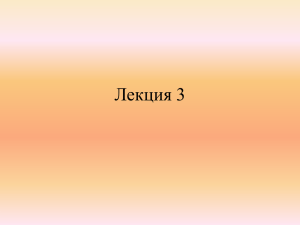
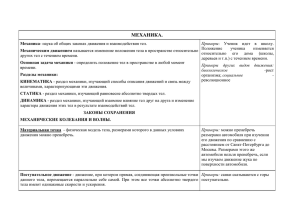
Индивидуальное задание №К4. Определение абсолютной скорости и абсолютного ускорения точки в сложном движении По заданным уравнениям относительного движения точки M и движения тела D определить для момента времени t t1 абсолютную скорость и абсолютное ускорение точки M . Схемы механизмов представлены в табл. 28, а необходимые для расчёта данные приведены в таблице 27. Примечание. 1. В вариантах 5, 6, 10, 12, 13, 20 – 22, 24, 27, 28 OM – дуга окружности. 2. На схемах 5, 10, 12, 21, 24, 27 OM – дуга, соответствующая меньшему центральному углу. 3. Положение точки M на схеме соответствует положительному значению s r . Пример. Треугольник ОАВ (рис. 18), вращается относительно вертикальной оси по закону e 0,9t 2 9t 3 рад . По гипотенузе ОА движется точка М, дуговая координата которой s r OM 16 8cos3π t см . Определить абсолютную скорость и абсолютное 2 ускорение точки М в момент времени t1 с . 9 Решение. Будем считать, что в расчётный момент времени плоскость чертежа (рис. 19) совпадает с плоскостью треугольника. Положение точки M на треугольнике определяется расстоянием s r OM . 2 При t1 с : 9 2 s r OM 16 8cos 3π t1 16 8cos 3π 20 см . 9 Введем подвижную систему координат, связанную с треугольником ОАВ. Относительное движение точки задано естественным способом. Определим величину относительной скорости точки M : ds 2 V r r 24πsin 3π t1 , при t1 с : dt 9 2 Положительный знак у величины V r Vr 24 π sin 3 180 65,2 см/с 9 показывает, что вектор относительной скорости Vr направлен в сторону возрастания s r . Переносная скорость, то есть скорость той точки гипотенузы, с которой совпадает в данный момент движущаяся точка M , направлена в сторону вращения по касательной к окружности, которую описывает точка в переносном движении (рис. 19): Ve ω e R , где R радиус окружности L , описываемой той точкой тела, с которой в данный момент времени 2 t1 с совпадает точка M : 9 R OM sin30 o 20 0,5 10 см , ω e угловая скорость тела: de ωe 1,8t 27t 2 рад/с . dt 2 При t1 с : 9 2 4 ω e 1,8 27 0,93 рад/с . 9 81 Отрицательный знак у величины ω e показывает, что вращение треугольника происходит вокруг вертикальной оси в сторону, обратную направлению отсчёта угла . Поэтому вектор ω e направлен по вертикальной оси вниз (рис. 19). Следовательно, переносная скорость: Ve 0,93 10 9,3 см/с. Абсолютную скорость точки M найдём как геометрическую сумму относительной и переносной скоростей V V r V e . Вектор V e направлен по касательной к окружности L в сторону вращения тела. Так как V e и V r взаимно перпендикулярны, то модуль абсолютной скорости точки M : V V 2r V e2 9,3 2 65,2 2 65,9 см/с . Абсолютное ускорение точки M равно геометрической сумме относительного, переносного и кориолисова ускорений: a a r a e a c . ( ) В рассматриваемом примере относительное движение прямолинейно, вектор a r не делится на составляющие, лежит на траектории движения точки M по гипотенузе OA : d 2s r ar 72π 2 cos3π t . 2 dt 2 При t1 с : 9 a r 36π2 355 cм/с2 . Отрицательный знак a r показывает, что вектор a r направлен в сторону отрицательных значений s r (см. рис. 20). При вычислении переносного ускорения a e следует учитывать, что при движении точки по криволинейной траектории (по окружности) ускорение имеет две составляющие: ae aeτ aen . Переносное касательное ускорение: a eτ R ε e , где e угловое ускорение треугольника; d 2 e εe 1,8 54 t . dt2 При t1 2 с: 9 2 10,2 рад/с 2 . 9 Одинаковые знаки у величин εe и ω e указывают на то, что вращение треугольника ускоренное, направления векторов ε e и ω e совпадают (рис. 19 и 20). ε e 1,8 54 aeτ 10 10,2 102 см/с 2 . Вектор переносного касательного ускорения а еτ направлен в ту же сторону, что и вектор переносной скорости Ve . Переносное нормальное ускорение: a en R ω e2 10 0,93 2 8,7 9 см/с 2 . Вектор а en направлен к центру окружности L . Кориолисово ускорение а c 2(ω е V r ) . Модуль кориолисова ускорения: а c 2 ω e V r sin (ωe , Vr ) . Так как sin (ωe , Vr ) sin150o 0,5 , следовательно: а c 2 0,93 65,2 0,5 61см/с 2 . В соответствии с правилом Жуковского вектор аc направлен перпендикулярно к плоскости треугольника в ту же сторону, что и вектор а еτ (см. рис. 20). Модуль абсолютного ускорения точки M находим, проектируя равенство ( ) на оси x, y, z : ах аеτ аc 102 61 163 см/с2 ; а у аеп аr cos60 9 355 0,5 186 см/с2 ; az ar cos30 355 Следовательно: 3 308 см/с2 . 2 a ax2 a 2y az2 395 см/с2 . Результаты расчёта сведены в таблицу: ωe , рад с Скорость, см/с Ve Vr V – 0,93 9,3 65,2 65,9 εe , рад с2 – 10,2 Ускорение, с м / с 2 ar a eτ a en ac ax ay az a – 355 102 9 61 163 – 186 – 308 395 Контрольные вопросы 1. При каких условиях движение точки считается сложным? 2. Какое движение точки называется абсолютным; относительным; переносным? 3. Как определяется абсолютная скорость точки в её сложном движении? 4. Как определяется кориолисово ускорение? 5. В каких случаях ускорение Кориолиса обращается в нуль? 6. Как определяется абсолютное ускорение точки в её сложном движении? 7. Правило Жуковского. Данные для индивидуального задания № К4 Номер задания табл. 26 Уравнение движения тела D e f1 t , рад Уравнение относительного движения точки M s r OM f 2 (t ) , см α, t1 , R, см см град с a, 18sin π t / 4 2/3 – 25 – 2 2t 3 t 2 0,4t 2 t 20sin πt 5/3 20 – – 3 2t 0,5t 2 2 – 30 – 4 0,6t 2 6t 3 10sin π t / 6 1 – – 60 5 3t 0,5t 3 40πcos π t / 6 2 30 – – 6 xe 2t 1t 2 φ r 150π t 2 1/6 25 – – 7 0,5t 2 20cos 2πt 3/8 – 40 60 8 t 3 5t 6 t 0,5t 2 2 – – 30 9 4t 1,6t 2 10 10sin 2πt 1/8 – – – 10 1, 2t t 2 20πcos π t / 4 4/3 20 20 – 11 2t 2 0,5t 25sin π t / 3 4 – 25 – 12 5t 4t 2 15 π t 3 /8 2 30 30 – 13 8t 2 3t 4t 2t 2 120πt 2 3 14sin πt 1/3 40 – – 2/3 – – 30 15 0, 2t 3 t 5 2 t2 t 2 – 60 45 16 t 0,5t 2 20sin πt 1/3 – 20 – 17 0,5t 2 1 – 4 5 – 8t t 2 t 3t 2 6t t 2 8t 3 2t 10t t 3 6t 4t 3 30πcos π t / 6 2 – – 60 2 45 – – 3 60 – – 21 2t 4t 2 25π t 2 t 1/2 25 – – 22 4t 0,2t 2 10πsin π t / 4 2/3 30 – – 23 2t 0, 25t 2 3t 2 4t 2 – – 30 24 2t 0,3t 2 75π 0,1t 0,3t 3 1 30 – – 25 1 0t 0,1t 2 15sin π t / 3 5 – – – 26 2πt 2 3/2 – – 45 1 14 18 19 20 8cos π t / 2 27 t 0,5t 3 10 2πcos2πt 1/8 30 – – 28 2t 3 5t 2,5πt 2 2 40 – – 29 0,6t 2 6 6 sin π t /16 4 36 – 30 30 2t 2 3t 5 3t 3 / 3 2 20 – 30 Схемы механизмов к заданиям №К4 задание №1 задание №2 задание №3 задание №4 задание №5 задание №6 задание №7 задание №8 задание №9 задание №10 задание №11 задание №12 задание №13 задание №14 задание №15 задание №16 задание №17 задание №18 задание №19 задание №20 задание №21 задание №22 задание №23 задание №24 задание №25 задание №26 задание №27 задание №28 задание №29 задание №30