Уравнение центральной винтовой оси Рассмотрим систему сил
реклама

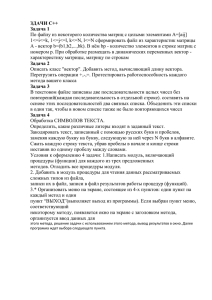
Уравнение центральной винтовой оси Рассмотрим систему сил F~k , (k = 1..n). Главный вектор системы сил не меняется при изменении центра приведения n X ~ = R F~k . k=1 Найдем главный момент системы относительно точек O и O1 . Получим ~O = M n X ~r × F~k , ~ O1 = M k=1 n X ~r1 × F~k . k=1 Так как ~r1 = ~r + O~1 O, то ~ O1 = M n X (~r + O~1 O) × F~k = k=1 n X ~r × F~k + k=1 или n X O~1 O × F~k . k=1 ~ O1 = MO + O~1 O × R. ~ M (1) z ~k F K @ I ~r @~r1 @q O1 y O x Рис.1 Получаем, что главный момент системы сил меняется при изменении цен~ — момент главного тра приведения. O1 — новый центр приведения, O~1 O × R вектора, расположенного в центре O, относительно нового центра O1 (так как радиус-вектор направлен из O1 в O). Пусть начало координат находится в O. Найдем все точки, относительно которых вектор главного момента направлен так же как и главный вектор ~ ~ O1 = pR, M где p — скалярный параметр, имеющий размерность длины. Из (1) и (2) следует ~ = pR ~ MO + O~1 O × R 1 (2) (3) Введем радиус-вектор этих точек ρ ~. Очевидно, ρ ~ = −O~1 O. Векторное произведение представим в виде ~k ~i ~j ~ = x ρ ~×R y z Rx Ry Rz В итоге, записывая (3) в проекциях, получим уравнения, определяющие прямую MOx − yRz + zRy = pRx , MOy − zRx + xRz = pRy , MOz − xRy + yRx = pRz , или MOx − yRz + zRy MOy − zRx + xRz MOz − xRy + yRx = = =p Rx Ry Rz Параметр p называется шагом винта. 2