МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССА ПУСКА
advertisement

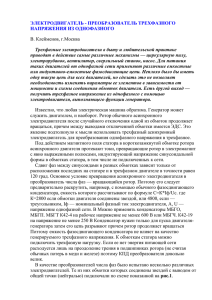
Электроника и приборостроение УДК 621.313.323 Ю.В. Коновалов МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПРОЦЕССА ПУСКА ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА Приведены результаты исследований пуска электроприводов с двигателями переменного тока при различных условиях в программной среде MATLAB. Выполнена оценка активной и реактивной энергии двигателя, а также тепловой энергии ротора во время пуска с различными параметрами. Исследование пуска, двигатели переменного тока, MATLAB, активная энергия, реактивная энергия, тепловая энергия ротора Yu.V. Konovalov MATHEMATICAL MODELLING OF PROCESS OF START-UP OF ELECTRIC MOTORS OF THE ALTERNATING CURRENT Results of researches of start-up of electric drives with alternating current engines are resulted under various conditions in program MATLAB environment. The estimation of active and jet energy of the engine, and also thermal energy of a rotor during start-up with various parametres is executed. Start-up research, alternating current engines, MATLAB, active energy, jet energy, rotor thermal energy Пуск электродвигателей как переменного, так и постоянного тока сопряжён со значительными затратами электроэнергии за короткий промежуток времени. Часть этой энергии выделяется в качестве тепла при прохождении пусковых токов по обмоткам электродвигателей (ЭД). Нагрев двигателей при этом вносит ограничения на допустимое количество пусков в сутки мощных ЭД, что необходимо учитывать при оптимизации параметров электроснабжения предприятий при использовании ЭД в качестве потребителей регуляторов [1]. При наличии на предприятии существенной двигательной нагрузки требуется оценить воздействие пусковых режимов как на электромеханический комплекс с ЭД, так и на элементы системы электроснабжения [1-4]. Проведение натурных экспериментов при различных условиях (уровнях напряжения и нагрузки на валу), особенно на двигателях, участвующих в производственном процессе, является затруднительным. Выполним исследования с использованием программного пакета MATLAB. Блок-схема для моделирования режимов асинхронного двигателя (АД) в программной среде MATLAB представлена на рис. 1. Данная схема позволяет подключать исследуемый двигатель к трёхфазной системе напряжения с заданными параметрами и в определённый момент времени; задавать нагрузку на валу; вычислять активную и реактивную мощности трёхфазной цепи статора; осциллографировать и замерять параметры АД с помощью блока измерения переменных электрической машины; вычислять и осциллографировать действующие значения токов статора и ротора; вычислять значение квадрата тока ротора 97 Вестник СГТУ. 2012. № 1 (64). Выпуск 2 (I22) для дальнейшей оценки теплового воздействия, а также выполнять построение функций всех перечисленных величин на плоттере с возможностью дальнейшей их обработки. При моделировании выбран метод вычисления одношаговый, использующий модифицированную формулу Розенброка второго порядка с минимальным и максимальным шагом 0,0001 и 0,001, соответственно. Данные параметры решения позволяют получить адекватные реальным условиям результаты, приемлемое время моделирования и оптимальное использование памяти вычислительной машины. Рис. 1. Блок-схема моделирования режимов АД в программной среде MATLAB Результаты измерений параметров пусковых режимов АД мощностью 160 кВт в режиме холостого хода (ХХ) представлены в табл. 1, где приняты следующие обозначения: U – напряжение на обмотках АД в относительных единицах (о.е.); IП – максимальное значение действующего тока статора за время пуска, А; IП*= IП / IН – максимальное значение действующего тока статора за время пуска, о.е.; IН – номинальное значение тока статора; I0 – ток статора на холостом ходу в установившемся режиме I0 = IC УСТ, А; I0*= I0 / IН – ток статора на холостом ходу, о.е.; tП – длительность пуска, с; tП* = tП /TJ – длительность пуска, о.е.; ТJ – механическая постоянная времени агрегата двигатель-механизм. Таблица 1 Параметры пусковых режимов АД мощностью 160 кВт на холостом ходу при различных уровнях напряжения на статоре U, о.е. IП, А IП*, о.е. I0 , А I0*, % tП, с tП*, о.е. 98 0,2 511 1,79 20,87 7,3 8,94 19,02 0,3 767 2,68 27,63 9,7 3,92 8,34 0,4 1023 3,58 37,97 13,3 2,22 4,72 0,5 1280 4,48 44,64 15,6 1,43 3,04 0,6 1536 5,38 53,51 18,7 1,01 2,15 0,7 1800 6,3 62,38 21,8 0,80 1,70 0,8 2052 7,18 71,28 71,28 0,64 1,36 0,9 2310 8,09 80,17 25 0,52 1,11 1,0 2571 9,0 89,07 31,2 0,47 1 1,1 2832 9,9 97,96 34,3 0,40 0,85 1,2 3093 10,83 106,9 37,4 0,38 0,81 1,3 3355 11,74 115,8 40,5 0,34 0,72 Электроника и приборостроение Как известно, и как видно из табл. 1, при уменьшении напряжения уменьшается кратность пускового тока, обычно значительно возрастает время пуска. Протекание повышенных токов по обмоткам двигателя приводит к потерям энергии и нагреву. Оценим потери активной энергии в роторе, а также активную и реактивную энергию, которая потребляется электродвигателем за время пуска в режиме ХХ при различных уровнях напряжения. Для вычисления энергии полученную при осциллографировании функцию изменения активной и реактивной мощности представим в виде полинома, а затем этот полином проинтегрируем по времени, где нижним пределом будет начало пуска t = 0, а верхним пределом – время окончания процесса пуска tП в соответствии с табл. 1. Потери активной энергии в роторе будем оценивать по «тепловой энергии ротора», представленной выражением I22·t, где I2 – это действующее значение тока ротора. Алгоритм вычисления энергии, например активной энергии статора при U = 0,4 о.е. в режиме ХХ, заключается в следующем: 1. Выведенный на плоттер график функции активной мощности статора Р1(t) (рис. 2, тонкая линия) интерполируем полиномом десятой степени, дающий возможность получить наибольшее приближение полинома к исследуемой функции (рис. 2, более толстая линия): P1 (t ) = − 0,1377 ⋅ t 10 + 6,3376 ⋅ t 9 − 119,24 p3 ⋅ t 8 + 1155,2 ⋅ t 7 − 5741,6 ⋅ t 6 + 9560,6 ⋅ t 5 + 36596 ⋅ t 4 − 1,9312 ⋅10 5 ⋅ t 3 + 3,1691⋅10 5 ⋅ t 2 − 1,6921⋅10 5 ⋅ t + 75114; 2. Интегрируя это выражение, получим активную энергию, прошедшую через двигатель за время пуска: t =tП W1 = t =t П ∫ P (t ) ⋅ dt = ∫ ( p 1 t =0 1 ⋅ t 10 + p 2 ⋅ t 9 + p 3 ⋅ t 8 + p 4 ⋅ t 7 + p 5 ⋅ t 6 + p 6 ⋅ t 5 + p 7 ⋅ t 4 + t =0 + p 8 ⋅ t 3 + p 9 ⋅ t 2 + p10 ⋅ t + p11 ) ⋅ dt = 2 , 22 = ∫ ( -0,1377 ⋅ t 10 + 6,3376 ⋅ t 9 − 119 , 24 p 3 ⋅ t 8 + 1155 , 2 ⋅ t 7 − 5741,6 ⋅ t 6 + 9560 ,6 ⋅ t 5 + 36596 ⋅ t 4 − − 1,9312 ⋅ 10 5 ⋅ t 3 + 3,1691 ⋅ 10 5 ⋅ t 2 − 1,6921 ⋅ 10 5 ⋅ t + 75114 ) ⋅ dt = 0 = 133 ,5 ⋅ 10 3 Вт ⋅ с = 133 ,5 кВт ⋅ с = 133 ,5 кДж . Выполняя вычисления по данному алгоритму, результаты сведём в табл. 2, где величина VAp·c соответствует реактивной энергии, измеряемой в кВAp·c. 5 2.5 x 10 2 P, кВт 1.5 1 0.5 0 0 0.5 1 1.5 2 2.5 t, с Рис. 2. График функции активной мощности статора при пуске на ХХ при U = 0,4 (тонкая линия) и полином данной функции десятой степени (более толстая линия) 99 Вестник СГТУ. 2012. № 1 (64). Выпуск 2 Таблица 2 Результаты вычислений энергетических параметров при пуске АД мощностью 160 кВт на холостом ходу при различных уровнях напряжения на статоре U, о.е. tП, с W1, кВт·с (кДж) VAp·с, кВАр·с 2 6 (I2 ·t)·10 , 2 А ·с 0,2 8,94 0,3 3,92 0,4 2,22 0,5 1,43 0,6 1,01 0,7 0,80 0,8 0,64 0,9 0,52 1,0 0,47 1,1 0,40 1,2 0,38 1,3 0,34 174,1 136,0 133,5 132,8 132,4 141,0 145,1 146,0 154,2 157,8 170,8 178,2 232,7 471,8 464,6 464,2 467,8 487,2 487,2 476,9 492,0 490,5 517,8 530,2 1,303 1,576 1,545 1,543 1,540 1,615 1,600 1,488 1,566 1,518 1,526 1,587 Таблица 3 Результаты моделирования и вычислений энергетических параметров при пуске АД мощностью 160 кВт при нагрузке на валу 25% от номинальной при различных уровнях напряжения на статоре U, о.е. IП, А IП*, о.е. IУСТ, А IУСТ*, % tП, с tП*, о.е. W1, кВт·с (кДж) VAp·с, кВАр·с (I22·t)·106, А2·с 0,6 1535 5,38 124 43,4 10,32 21,96 0,7 1800 6,3 114 39,9 1,73 3,68 0,8 2050 7,18 109 38,2 1,06 2,26 0,9 2310 8,09 109 38,2 0,75 1,60 1,0 2569 9,0 111 38,9 0,61 1,30 1,1 2830 9,9 115 40,3 0,49 1,04 1,2 3092 10,83 120 42 0,41 0,87 1,3 3353 11,74 126 44,1 0,38 0,81 1231,4 305,06 242,74 217,35 210,09 204,38 204,37 212,87 6038,2 1156,4 873,63 773,84 739,04 715,15 699,63 708,11 21,4 3,8902 2,903 2,5168 2,4503 2,3762 2,1998 2,1931 Таблица 4 Результаты моделирования и вычислений энергетических параметров при пуске АД мощностью 160 кВт при нагрузке на валу 40% от номинальной при различных уровнях напряжения на статоре U, о.е. IП, А IП*, о.е. IУСТ, А IУСТ*, % tП, с tП*, о.е. W1, кВт·с (кДж) VAp·с, кВАр·с (I22·t)·106, А2·с 100 0,8 2050 7,18 150 52,5 2,20 4,68 495,62 1941 6,4838 0,9 2310 8,09 142 49,7 1,11 2,36 315,26 1167,4 3,8728 1,0 2570 9,0 138 48,3 0,77 1,64 268,04 962,72 3,1246 1,1 2830 9,9 137 48,0 0,58 1,23 239,93 860,67 2,7766 1,2 3090 10,83 138 48,3 0,47 1,0 230,87 816,02 2,7005 1,3 3352 11,74 141 49,4 0,36 0,77 215,84 746,39 2,3612 Электроника и приборостроение Из табл. 2 видно, что «тепловая энергия ротора» I22·t фактически не зависит от напряжения статора в режиме ХХ. Активная энергия ЭД на ХХ сначала уменьшается с ростом напряжения до 0,6 о.е., а затем начинает возрастать. Реактивная энергия по мере роста напряжения увеличивается. За время пуска tП = 0,47 с при номинальном напряжении на ХХ электродвигатель потребляет активную энергию W1 = 154,2 кДж, что в 2,05 раза больше, чем потребляемая двигателем активная энергия за то же время при номинальной нагрузке. Результаты исследования режимов пуска при нагрузке на валу 25% и 40% от номинальной приведены в табл. 3 и табл. 4, соответственно. Анализ результатов моделирования под нагрузкой однозначно показывает, что при понижении напряжения значительно возрастают потребляемая активная и реактивная энергии ЭД, а также «тепловая энергия ротора», что приводит к повышенному нагреву двигателя, хотя и при ограничении пускового тока. Поэтому устройства плавного пуска, осуществляющих пуск на пониженном напряжении нужно использовать, только если имеется ограничения по величине броска пускового тока или механические ограничения. В остальных случаях, с точки зрения уменьшения теплового воздействия на электродвигатели, целесообразно использовать прямой способ пуска. ЛИТЕРАТУРА 1. Возбуждение и устойчивость электромеханических комплексов с синхронными двигателями / Б.Н. Абрамович и др. СПб.: Изд-во Политехн. ун-та, 2010. 127 с. 2. Коновалов Ю.В. Моделирование электромеханических процессов в синхронном двигателе // Современные технологии. Системный анализ. Моделирование: Изд-во ИрГУПС. 2011. № 4(33). С. 84-89. 3. Дунаев М.П. Комплексный метод создания экспертных систем для наладки электрооборудования // Современные технологии. Системный анализ. Моделирование: Изд-во ИрГУПС. 2010. № 4(29). С.108-111. 4. Павлов В.Е. Моделирование нагрузок электроприводов типовых производственных механизмов с применением системы «Преобразователь частоты – асинхронный двигатель» // Вестник ИрГТУ. 2011. №9(56). C. 168-173. Коновалов Юрий Васильевич – кандидат технических наук, доцент кафедры «Электропривода и электрического транспорта» Иркутского государственного технического университета Статья поступила в редакцию 7.02.12, принята к опубликованию 12.03.12 101