LC36 - ALFA
реклама

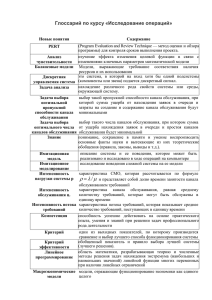
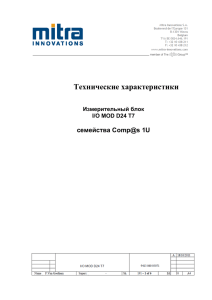
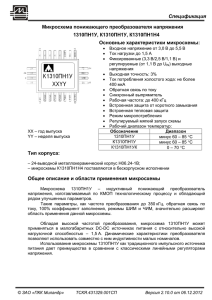
AS “АLFA RPAR” Рижский завод полупроводниковых приборов LC362 Рига, Латвия www.alfarzpp.lv; [email protected] Контроллер управления двумя шаговыми двигателями Основные характеристики 2 канала; Тип корпуса: SOIC -16 (150 Mil); Напряжение питания: 4,5 В ÷ 5,5 В; Внутренний автогенератор; Внутренний sin/cos преобразователь кода; Простое управление +/- Описание микросхемы Микросхема LC362 предназначена для управления двумя биполярными шаговыми двигателями с сопротивлением обмоток не менее 200 Ом, например, типа 6405R407 фирмы SONCEBOZ. Управление осуществляется в режиме микростепов с помощью ШИМ. На один степ приходится восемь микростепов. Для формирования ШИМ имеется внутренний автогенератор. Частота определяется внешними R и C. Схема включения приведена на рис.1. При подаче сигнала низкого уровня на вход NRES микросхема приводится в исходное состояние. На всех выходах устанавливается низкий потенциал. Управление двигателями осуществляется путем подачи импульсов на входы CLK1 и CLK2. При высоком потенциале на входе UPDN двигатель совершает один микростеп вперед на один импульс CLK, при низком - назад. Переключать сигнал UPDN можно только при низком уровне на входах CLK1 и CLK2. Частота автогенератора определяется значениями Rt и Сt и рассчитывается (для температуры равной 25 градусов и UCC=5,5 B) по формуле: FC0,43/(Rt х Сt), при этом: Rt>10 к, Ct< 27 пФ. Частота ШИМ (Fs) определяется из выражения: Fs= FC / 64, где FC — частота внутреннего генератора, Ts=1/Fs – период ШИМ. Рис. 1. Схема включения микросхемы LC362. Таблица 1. Назначение выводов Номер Обозначение вывода вывода Назначение вывода Номер Обозначение вывода вывода Назначение вывода 1 CLK1 Вход управления канала 1 9 CLK2 Вход управления канала 2 2 NRES Сброс 10 GND Земля 3 4 5 6 LSP1 LSN1 LSN2 LSP2 Выход канала 1 синуса (+) Выход канала 1 синуса (-) Выход канала 2 синуса (-) Выход канала 2 синуса (+) 11 12 13 14 LCP2 LCN2 LCN1 LCP1 7 GND Земля 15 UPDN Выход канала 2 косинуса (+) Выход канала 2 косинуса (-) Выход канала 1 косинуса (-) Выход канала 1 косинуса (+) Вход управления – увеличить/уменьшить 8 RC Вход управления частотой автогенератора 16 Ucc 2016 v4 1 Напряжение питания AS “АLFA RPAR” Рижский завод полупроводниковых приборов LC362 Рига, Латвия www.alfarzpp.lv; [email protected] Алгоритм функционирования. При включении питания (см. Рис.2) необходимо сформировать внешний сигнал сброса NRES, который устанавливает регистры в исходное состояние, внутренний генератор выключается, а уровни выходных напряжений устанавливаются в нуль. Входы UPDN, CLK1 и CLK2 удерживать в состоянии логического нуля. При включении питания нужно удерживать вход NRES в состоянии логического нуля в течение не менее 10мкс после окончания установления напряжения. В это время выводы LSP, LCP, LSN и LSP устанавливаются в состояние логического нуля. Входная емкость, подключенная ко входу RC, заряжается до напряжения питания. При переходе сигнала NRES в состояние логической единицы включается внутренний автогенератор и ШИМ на выходах микросхемы. Рис.2 Временная диаграмма при включении питания Период следования импульсов CLK (см. Рис.3) должен быть не менее времени реакции ШД на изменение токов в его обмотках. Рис. 3 Временная диаграмма при управлении ШД 2016 v4 2 AS “АLFA RPAR” Рижский завод полупроводниковых приборов LC362 Рига, Латвия www.alfarzpp.lv; [email protected] На рисунке 4 изображены возможные направления вектора магнитного поля в магнитной системе ШД. Положение 0 соответствует состоянию после включения питания и процедуры сброса. После подачи одного импульса CLK вектор поворачивается на одну позицию против часовой стрелки при UPDN=1 и по часовой при UPDN=0. Точные углы поворота и длительности высокого уровня сигналов на выходах микросхемы в квантах ШИМ приведены в таблице 2. Длительность кванта ШИМ равна Ts/32. Нулевое значение в таблице 2 соответствует низкому постоянному уровню на соответствующем выводе микросхемы. Строка STEP=0 соответствует состоянию после сброса. Рис. 4 Возможные направления вектора магнитного поля в магнитной системе ШД. Таблица 2. Точные углы поворота и длительности высокого уровня сигналов на выходах микросхемы: LSP, LSN, LCP, LCN в квантах ШИМ, FI в угловых градусах. STEP LSP LSN LCP LCN FI STEP LSP LSN LCP LCN FI 0 3 0 30 0 5.7 16 0 3 0 30 185.7 1 9 0 30 0 16.7 17 0 9 0 30 196.7 2 15 0 28 0 28.2 18 0 15 0 28 208.2 3 19 0 23 0 39.6 19 0 19 0 23 219.6 4 23 0 19 0 50.4 20 0 23 0 19 230.4 5 28 0 15 0 61.8 21 0 28 0 15 241.8 6 30 0 9 0 73.3 22 0 30 0 9 253.3 7 30 0 3 0 84.3 23 0 30 0 3 264.3 8 30 0 0 3 95.7 24 0 30 3 0 275.7 9 30 0 0 9 106.7 25 0 30 9 0 286.7 10 28 0 0 15 118.2 26 0 28 15 0 298.2 11 23 0 0 19 129.6 27 0 23 19 0 309.6 12 19 0 0 23 140.4 28 0 19 23 0 320.4 13 15 0 0 28 151.8 29 0 15 28 0 331.8 14 9 0 0 30 163.3 30 0 9 30 0 343.3 15 3 0 0 30 174.3 31 0 3 30 0 354.3 2016 v4 3 AS “АLFA RPAR” Рижский завод полупроводниковых приборов LC362 Рига, Латвия www.alfarzpp.lv; [email protected] о Электрические и временные параметры в диапазоне температур от -45 до +105 С (для каждого канала) Наименование параметра единица измерения Буквенное обозначение параметра Напряжение питания, В Статический ток потребления, мкА Динамический ток потребления, мА Частота ШИМ, кГц Входной ток высокого уровня, мкА Входной ток утечки низкого уровня, мкА Входное напряжение высокого уровня, В Входное напряжение низкого уровня, В Ucc ICS ICD FC IIH IIL UIH UIL Выходное напряжение высокого уровня, В UOH Выходное напряжение низкого уровня, В UOL Режим измерения Ucc=5,5 В, NRES=0 Ucc=5,5 В Ucc=4,5 В Ucc=5,5 В, UIN=UCC Ucc=5,5 В, UIN=0B Ucc=4,5 В Ucc=5,5 В Ucc=4,5 В, RH=200Oм Ucc=5,5 В, RH=200Oм Норма параметра не не менее более 4,5 5,5 10 2 15 2 2 Ucc-0,7 0,5 3,8 - - 0,5 Примечание: 1 При изменении сопротивления нагрузки RH следует учитывать, что максимальный выходной ток в каждом канале не должен превышать 40 мА. 2 Максимальный входной ток не должен превышать 2 мА. Корпус типа SOIC-16 (150 Mil), размеры в мм 2016 v4 4