УДК 622:658.011.56 Бабойцев Алексей Геннадиевич магистрант кафедра «Автоматика и управление в технических системах»
реклама

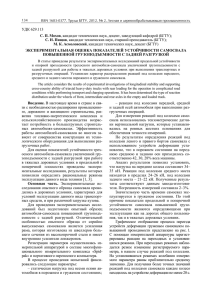
УДК 622:658.011.56 Бабойцев Алексей Геннадиевич магистрант кафедра «Автоматика и управление в технических системах» Московский государственный горный университет АВТОМАТИЗАЦИЯ ПРОЦЕССА ПАРКОВКИ САМОСВАЛА В ЗОНЕ ПОГРУЗКИ ГОРНОЙ МАССЫ AUTOMATION OF THE PROCESS OF PARKING TRUCK IN THE ZONE LOADING OF THE ROCK MASS Самым ярким примером существующих решений подобной задачи является система автономных грузоперевозок – передовая технология Komatsu на руднике компании Rio Tinto в Австралии. Разработанная компанией Komatsu система автономных грузоперевозок, получившая название FrontRunner, была введена в эксплуатацию на руднике Уэст-Анджелас месторождения Ист-Пилбара в Западной Австралии, принадлежащем компании Rio Tinto. Это второй запуск в эксплуатацию системы такого типа, первая система была поставлена на медные рудники компании Codelco в Чили. Система FrontRunner комплектуется только горнодобывающим оборудованием Komatsu, имея в своем составе 5 автономных самосвалов на базе модели 930Е с электроприводом, а также сверхтяжелый гидравлический экскаватор PC5500, бульдозер D475A, колесный бульдозер WD900 и автогрейдер GD825. Подобная система исключает человеческий фактор при управлении самосвалом. Таким образом, для автономных самосвалов характерны следующие преимущества: увеличение производительности; снижение издержек на эксплуатацию; увеличение межремонтного пробега. Система автономных грузоперевозок на данный момент одобрена для рынков в Чили и Австралии. Недостатком этой системы является то, что она не универсальна и применима только в одном частном случае. Автономные самосвалы не умеют парковаться в любом указанном месте они лишь остановиться на определенном участке дороги, после чего погрузочная машина должна сама скорректировать свое положение и произвести погрузки горной массы. В диссертационной работе предложен один из вариантов решения этой задачи. Так как компанией Komatsu была разработана системы автономных грузоперевозок, то я считаю решенными следующие задачи: автоматизация движения самосвала передним и задним ходом; 3 автоматизация управления рулевым колесом; обнаружение и обход препятствий при движении передним ходом. С учетом вышесказанного задача автоматизации процесса парковки самосвала в зоне погрузки раскладывается на семь взаимосвязанных задач по автоматизации отдельных элементов: 1. остановка самосвала в зоне, оптимальной для начала маневра; 2. поворот руля для начала движения задним ходом; 3. движение задним ходом; 4. корректировка конечного положения; 5. движение передним ходом; 6. поворот руля для выхода на исходную позицию; 7. выход на исходную позицию. Задача по остановке самосвала в зоне, оптимальной для начала маневра сводится к поиску координаты точки на дороге или вне ее такой, чтобы самосвал смог приступить к выполнению задачи №2 без дополнительного перемещения. Далее самосвал останавливается в окрестности этой точки. Задача считается выполненной, если погрешность позиционирования не превышает 1 м. Для решения этой задачи необходимо определить системы координат. Введем 2 системы координат: 1. Система координат связанная с самосвалом. Центр системы координат – геометрический центр прямоугольника, длинна которого равна длине самосвала (вместе с кузовом), а ширина равна – ширине самосвала (самой широкой части самосвала). Ось X направлена в сторону пассажирской двери самосвала, ось Y направлена в сторону передних фар. 2. Система координат связанная с землей. Центр системы координат находится в точке, в окрестности которой должен припарковаться самосвал для загрузки горной массы. Ось Y направлена в сторону от мех. лопаты, которая производит погрузку, а ось X направлена вправо от мех. лопаты, если стоять спиной к ней. 251658240 Рис. 1. Системы координат. Y0OX0 – неподвижная система координат; YOX – подвижная система координат 4 Для того чтобы однозначно определить положение объекта управления в пространстве необходимо задать 2 точки, принадлежащие объекту. Пусть первая точка, точка А – это начало координат подвижной системы координат, а вторая точка, точка B – имеет координату (0; L), где L – расстояние от геометрического центра прямоугольника, длина которого равна длине самосвала, а ширина – ширине самосвала, в самой широкой части, до переднего бампера самосвала. В зависимости от начального направления движения самосвала координаты будут принимать различные значения и знаки, поэтому необходимо рассмотреть 4 абстрактных случая движения самосвала относительно начала координат неподвижной системы координат. Первый случай. Самосвал, далее объект, имеет начальное положение в первой четверти неподвижной системы координат. Тогда координаты точек А и B примут следующие значения: А(-N; Y), B(-(N+m+l); Y). 251658240 Рис. 2. Начальное положение объекта в первой четверти неподвижной системы координат Второй случай. Объект имеет начальное положение во второй четверти неподвижной системы координат. Тогда координаты точек А и B примут следующие значения: А(N,Y) и B (N+m+l; Y). 251658240 5 Рис. 3. Начальное положение объекта во второй четверти неподвижной системы координат Третий случай. Объект имеет начальное положение в третьей четверти неподвижной системы координат. Тогда координаты точек A и B примут следующие значения: А(N,Y) и B (N+m+l; Y). 251658240 Рис. 4. Начальное положение объекта в третьей четверти неподвижной системы координат Четвертый случай. Объект имеет начальное положение в четвертой четверти неподвижной системы координат. Тогда координаты точек А и B примут следующие значения: А(-N; Y), B(-(N+m+l); Y). 251658240 Рис. 5. Начальное положение объекта в четвертой четверти неподвижной системы координат 6 Рассмотрев 4 случая, можно вывести следующую формулу: XA = N, если xобъекта < 0 XA = - N, если xобъекта > 0 XB = -(N+m+l), если xобъекта >0 XB = N+m+l, если xобъекта < 0 YA = YB = Y. Приведенные выше рассуждения справедливы только в том случае, если нет запрета на съезд самосвала с дороги. В противном случае на расположение объекта оказывает влияние геометрическая форма участка дороги в окрестности точек пересечения ее с осью Y0. Учитывая тот факт, что самосвал уже оснащен автоматической системой управления процессом перемещения вдоль дороги, самым оптимальным способом расчета координат точек А и B является наблюдение за изменением только координаты Y0 точки А. Как только Y0 = Y необходимо остановить самосвал. Координаты точки B остается только принять как данное, и корректировать движение самосвала уже на следующих шагах процесса. Какую именно из предложенных выше моделей определения координат точек А и В использовать можно понять двумя способами – первое, заранее зафиксировать участки дороги, где сходить с дороги запрещено, или второе – динамически определять опасные участки дороги на основе информации, получаемой от внешней сенсорной системы. Литература. 1. Певзнер Л.Д. Теория автоматического управления – М: Издательство Московского государственного горного университета, 2002. 2. [Электронный ресурс] Komatsu / Ред. Komatsu: экскаваторы, погрузчики, самосвалы, 2013 – режим доступа: http://www.komatsu.ru/ – свободный. Загл. с экрана – яз. рус. 3. Афанасьев В. Н. Оптимальные системы управления. Аналитическое конструирование – М: Физический факультет МГУ, 2011. 4. Малинецкий Г. Г. Хаос. Структуры. Вычислительный эксперимент. Введение в нелинейную динамику. 3-е изд. – М.: УРСС, 2001. 5. Подэрни Р. Ю. Механическое оборудование карьеров: Учебник для вузов. – 7-ое изд., перераб. и доп. – М.: Издательство «Майнинг Медиа Групп», 2011. – 640 с. 7 Аннотация. В статье изложена постановка задачи автоматизации процесса парковки самосвала в зоне погрузки горной массы, а также описано концептуальное решение задачи определения оптимальной координаты остановки для начала парковки самосвала. In this paper the problem of automating the process of setting parking the truck in the loading area of the rock mass, and describes a conceptual solution to the problem of determining the optimal location to start stopping the truck parking. Ключевые слова. парковка, самосвал, оптимальная начальная координата, зона погрузки горной массы parking, tip truck, the optimal location, the loading area of the rock mass 8