RU 100657 U1 ПАТЕНТ НА ПОЛЕЗНУЮ МОДЕЛЬ
реклама

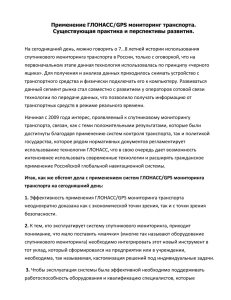
РОССИЙСКАЯ ФЕДЕРАЦИЯ (19) RU (11) 100657 (13) U1 (51) МПК G08G1/123 (2006.01) ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ, ПАТЕНТАМ И ТОВАРНЫМ ЗНАКАМ (12) ПАТЕНТ НА ПОЛЕЗНУЮ МОДЕЛЬ Статус: по данным на 28.05.2012 - действует Пошлина: учтена за 2 год с 05.08.2011 по 04.08.2012 (21), (22) Заявка: 2010132755/11, 04.08.2010 (24) Дата начала отсчета срока действия патента: 04.08.2010 (45) Опубликовано: 20.12.2010 Адрес для переписки: 111250, Москва, ул. Авиамоторная, 53, Открытое акционерное общество "Российская корпорация ракетно-космического приборостроения и информационных системы" (ОАО "Российские космические системы") (72) Автор(ы): Белянко Евгений Александрович (RU), Кириков Владимир Александрович (RU), Божко Андрей Владимирович (RU), Савин Александр Викторович (RU) (73) Патентообладатель(и): Открытое акционерное общество "Российская корпорация рак и информационных системы" (ОАО "Российские космические (54) АВТОМОБИЛЬНАЯ СИСТЕМА СПУТНИКОВОЙ НАВИГАЦИИ (57) Реферат: Полезная модель относится к области навигации, а именно к системам для определения местоположения транспортного средства (ТС) по сигналам космических навигационных систем (КНС) ГЛОНАСС/GPS, отображения ТС на электронной карте местности, мониторинга ТС, отображения сервисной и диагностической информации ТС и выполнения мультимедийных функций. Техническим результатом является устранение вышеперечисленных недостатков, а так же расширение функциональных возможностей: увеличению эффективности контроля и оперативности, повышению автоматизации процессов реагирования и взаимодействия, повышению уровня сервиса и безопасности. Автомобильная система спутниковой навигации состоит из космически аппаратов навигационных систем ГЛОНАСС/GPS, антенны GPS/ГЛОНАСС, контроллера бортового, платы контроллера бортового, трех-осевого механического акселерометра, flash-памяти, приемника GPS/ГЛОНАСС, интеллектуального коммутатора питания, GSM модема, управляющего микроконтроллера, аккумулятора, дисплея мультимедийного, платы сопряжения, GPS-автомагнитолы, GSM-антенны, технологических входов/выходов, средств обеспечения GPRS-обмена (GSM-оператор), сети интернет, персонального компьютера (ПК), телематического сервера, повышающего импульсного стабилизатора напряжения, преобразователя уровней RS232, платы интерфейсной, порта RS232, светодиодных индикаторов. 2 з.п. ф-лы, 3 ил. Полезная модель относится к области навигации, а именно к системам для определения местоположения транспортного средства (ТС) по сигналам космических навигационных систем (КНС) ГЛОНАСС/GPS, отображения ТС на электронной карте местности, мониторинга ТС, отображения сервисной и диагностической информации ТС и выполнения мультимедийных функций. Автомобильная система спутниковой навигации (ACCH) представляет субъекту (пользователю), имеющему в своем распоряжении устройство мониторинга и специальное программное обеспечение (ПО), получать навигационную информацию о ТС с установленным на него персональным оборудованием (трекером) в любой момент времени. В этом случае предоставление навигационной информации, отображаемой на электронной карте местности, происходит с использованием ресурсов сети Интернет, без посредничества диспетчерских служб. В качестве областей применения системы могут быть области диспетчеризации общественного или специального автотранспорта, системы охраны личного транспорта, системы поиска угнанных автомобилей и др. Из уровня техники известна система мониторинга, информационного обслуживания и охраны транспортных средств от несанкционированного воздействия (см. патент RU 2155684 от 05.04.2000), содержащая телефонную сеть связи и передачи данных, подключенную к пейджинговой сети связи, содержащей операторский блок передачи данных и установленные на транспортных средствах абонентские приемники, выполненные с возможностью активации иммобилайзеров и запуска передатчиков маячкового типа при срабатывании датчиков несанкционированного воздействия на объект или при приеме по пейджинговой сети связи блокирующего и маячкового кодов соответственно. Также территориально распределенные на улично-дорожной сети стационарные приемопередатчики, выполненные с возможностью приема сигналов тревоги от передатчиков маячкового типа и с возможностью передачи сообщений, по крайней мере, на одну из базовых станций, связанных с информационным центром. Информационный центр содержит последовательно включенные блок приема и блок первичной обработки, выходы которого подключены соответственно к блоку регистрации и к блоку отображения, при этом стационарные приемопередатчики выполнены с возможностью пеленгации передатчиков маячкового типа и измерения мощностей принимаемых от них сигналов, а информационный центр содержит блок приема и обработки сообщений из внешних источников, блок передачи информационных сообщений, блок вторичной обработки, подключенный к выходам блока первичной обработки, блока регистрации, блока отображения и блока приема и обработки сообщений из внешних источников и выполненный с возможностью определения координат транспортных средств по совокупности данных о местоположении стационарных приемопередатчиков, принявших от передатчиков маячкового типа сигналы тревоги, а также с возможностью определения и учета количества включений передатчика маячкового типа для осуществления финансовых расчетов с владельцем транспортного средства. Блок передачи информационных сообщений через формирователь голосовых сообщений подключен к территориально распределенной сети центров оперативного реагирования. При этом владельцы транспортных средств снабжены транспондерными карточками (ТК), на которых в определенных полях нанесены секретные коды: блокирующий, маячковый и расчетный, а в цифровой памяти ТК зафиксирован идентификационный код абонента системы. На каждом транспортном средстве в узле управления иммобилайзером установлены блок дистанционного считывания идентификационного кода с ТК и блок ручного ввода разблокирующего кода, связанные с соответствующими входами узла управления иммобилайзером, а также индикатор режимов работы охранных датчиков, связанный с соответствующим его выходом. Недостатком указанной системы является невысокая точность определения координат контролируемых подвижных объектов, существенно ограничивающая область практического применения системы. Этот недостаток устраняется в системах и комплексах, использующих аппаратуру совмещенного приема сигналов спутниковых радионавигационных систем: американской - GPS и российской - ГЛОНАСС. Так же из уровня техники известна система безопасности, управления и навигации для автомобилей (см. патент US 5504482, от 02.04.1996), содержащая запоминающее устройство для хранения дорожных карт в цифровой форме, устройство для ввода пункта назначения, устройство для формирования цифровых сигналов скорости и ускорения автомобиля для индикации аварийной ситуации и антенну для приема сигналов спутниковой радионавигационной системы GPS и сигналов, несущих информацию о транспортном потоке и передачи аварийных сигналов. Принятые сигналы преобразуют в цифровую форму. Устройство обработки определяет текущее местоположение автомобиля на основе сигналов GPS и сигналов, несущих информацию о скорости и ускорении, определяет первый маршрут между текущим местоположением и пунктом назначения и второй маршрут при высокой плотности транспортного потока на первом маршруте, передает аварийные сигналы, кодированные с учетом текущего местоположения, если ускорение автомобиля выходит за заданные пределы, и управляет автомобилем с помощью электронных средств. Работа этой системы ограничена навигацией мобильного объекта, при этом система не позволяет производить высокоточное определение координат, контроль исправности технических средств системы, сбор и хранение информации о маршруте движения потребителя (ведение журнала событий). Наиболее близкой к заявляемому комплексу мониторинга по принципу действия и технической реализации является система для определения местоположения подвижных объектов (см. патент RU 63094 от 27.12.2006). Система содержит GSM-модем, GSM-антенну, SIM-карту оператора сотовой связи, GPS-приемник, GPS-антенну, контроллер с энергонезависимой памятью, порт программирования контроллера, блок питания, интегральный акселерометр, детектор движения, выключаемый стабилизатор напряжения питания акселерометра, выключаемый стабилизатор напряжения питания GPS-приемника, выключаемый стабилизатор напряжения питания GSM-модема, светочувствительный элемент и светодиодный индикатор состояния и химический источник тока. При этом первый, второй и третий выходы контроллера подключены к управляющим входам стабилизатора напряжения питания акселерометра, стабилизатора напряжения питания GPS-приемника и стабилизатора напряжения питания GSM-модема соответственно. Четвертый выход контроллера подключен к индикатору состояния модуля. Химический источник тока подключен к контроллеру и ко входам всех трех стабилизаторов напряжения. Выход стабилизатора напряжения питания акселерометра подключен к интегральному акселерометру, первый и второй информационные выходы которого подключены к первому и второму входам детектора движения. Выход детектора подключен к первому входу контроллера. Выход стабилизатора напряжения питания GPS-приемника подключен к GPSприемнику, последовательный порт которого подключен к первому последовательному порту контроллера. Выход стабилизатора напряжения питания GSM-модема подключен к GSM-модему, последовательный порт которого подключен ко второму последовательному порту контроллера. К радиочастотному входу GPS-приемника подключена GPS-антенна, а к GSMмодему подключена GSM-антенна. SIM-карта подключена ко второму последовательному порту GSM-модема. Ко второму входу контроллера подключен светочувствительный элемент. Недостатками известной системы являются: - отсутствие возможности периодического самотестирования навигационной аппаратуры, установленной на подвижном объекте, получение достоверных сведений о работоспособности прибора с записью результатов тестирования в журнал событий прибора. - отсутствие возможности проведения пользователем дистанционной технической диагностики навигационной аппаратуры, установленной на подвижном объекте с помощью управляющих команд; - зависимость навигационной аппаратуры, установленной на подвижном объекте от наличия напряжения бортовой сети транспортного средства. Техническим результатом является устранение вышеперечисленных недостатков, а так же расширение функциональных возможностей: увеличению эффективности контроля и оперативности, повышению автоматизации процессов реагирования и взаимодействия, повышению уровня сервиса и безопасности. Технический результат достигается тем, что автомобильная система спутниковой навигации определения местоположения подвижных объектов, содержит дисплей мультимедийный, состоящий из GPS-автомагнитолы и платы сопряжения, антенну GPS/ГЛОНАСС, контроллер бортовой, состоящий из навигационного приемника сигналов GPS/ГЛОНАСС, GSM-модема, аккумулятора, SIM-карты и платы контроллера бортового, GSM-антенну и преобразователь напряжения. ACCH обеспечивает точную навигацию и надежное функционирование за счет использования мощного вычислительного ядра, высокоинформативного графического интерфейса и расширенной справочной системы программного обеспечения, встроенной базы навигационных данных. Кроме этого, стабильность показателей качества функционирования системы в условиях эксплуатации обеспечивается за счет использования в конструкции ACCH технологической платформы, основными компонентами которой являются: - малогабаритный экономичный модуль навигационного приемника, имеющего 24 программно переключаемых универсальных радиоканала для приема сигналов навигационных систем ГЛОНАСС/GPS и работающего по всем навигационным космическим аппаратам этих систем, находящимся в зоне радиовидимости; - механический трех-осевой акселерометр (вместе с необходимым программным обеспечением), позволяющий независимо от сигналов навигационного приемника определять наличие и отсутствие движения отслеживаемого объекта. Таким образом, благодаря этому свойству акселерометра, в случае продолжительной неподвижности отслеживаемого объекта навигационный приемник может быть выключен для экономии энергии. Последующее включение навигационного приемника произойдет по сигналу акселерометра о начале движения отслеживаемого объекта; ACCH обеспечивает выполнение следующих функций: - определение координат и параметров движения подвижного объекта по сигналам спутниковых навигационных систем ГЛОНАСС и GPS; - отображение местоположения и маршрутов движения подвижного объекта за любой промежуток времени на подробной карте местности на экране монитора персонального компьютера или карманного персонального компьютера, подключенных к сети Интернет; - контроль нахождения подвижного объекта в заранее установленной зоне или передвижения по заранее определенному маршруту. Определение координат и параметров движения подвижного объекта возможно в следующих режимах работы: - режим «он-лайн» - ежеминутного определения местоположения объекта; - режим автоматической передачи данных об определенном местоположении через заданный (настраиваемый) интервал времени от 30 секунд до 1 часа; - режим определения координат и параметров движения по запросу пользователя (субъекта). Для управления режимами работы ACCH, а так же с целью проведения дополнительных настроек, обеспечивается отработка специальных команд, посылаемых на ACCH по протоколу обмена данными TCP/IP. Сущность предлагаемого технического решения поясняется чертежами, где изображено: Фиг.1 - функциональная схема автомобильной системы спутниковой навигации. Фиг.2 - алгоритм работы интеллектуального коммутатора питания. Фиг.3 - Структурная схема ИКП Принцип работы системы основан на использовании принципа определения местоположения подвижного объекта по сигналам GNSS и проведения мониторинга подвижного объекта с использованием телематического сервера. На фиг.1 обозначены: 1 - космические аппараты навигационных систем ГЛОНАСС/GPS; 2 - антенна GPS/ГЛОНАСС; 3 - контроллер бортовой; 4 - плата контроллера бортового; 5 - трех-осевой механический акселерометр; 6 - flash-память; 7 - приемник GPS/ГЛОНАСС; 8 - интеллектуальный коммутатор питания; 9 - GSM модем; 10 - управляющий микроконтроллер; 11 - аккумулятор; 12 - дисплей мультимедийный; 13 - плата сопряжения; 14 - GPS-автомагнитола; 15 - GSM-антенна; 16 - технологические входы/выходы; 17 - средства обеспечения GPRS-обмена (GSM-оператор); 18 - сеть интернет; 19 - персональный компьютер (ПК); 20 - телематический сервер; 21 - повышающий импульсный стабилизатор напряжения; 22 - преобразователь уровней RS232; 23 - плата интерфейсная; 24 - напряжение питания от бортового источника; 25 - порт RS232; 26 - светодиодные индикаторы. Функциональная схема автомобильной системы спутниковой навигации, приведенная на фиг.1, состоит из контроллера бортового (поз.3), в состав которого входят: плата контроллера бортового (поз.4), на которой расположены: управляющий микроконтроллер (поз.10), GSM модем (поз.9), трех-осевой механический акселерометр (поз.5), flash-память (поз.6), приемник GPS/ГЛОНАСС (поз.7), интеллектуальный коммутатор питания (поз.8) и технологические входы/выходы (поз.16), плата интерфейсная (поз.23), на которой расположены повышающий импульсный стабилизатор напряжения (поз.1), преобразователь уровней для шины RS232 (поз.22) и светодиодные индикаторы (поз.26). Так же в состав контроллера бортового входят: свинцовый аккумулятор (поз.11), антенна GPS/ГЛОНАСС (поз.2), подключенная к радиочастотному входу приемника GPS/ГЛОНАСС (поз.7) и GSM-антенна (поз.15), подключенная к радиочастотному разъему GSM модема (поз.9). Выходы приемника GPS/ГЛОНАСС (поз.7) подключены к управляющему микроконтроллеру (поз.10), первый и второй информационные выходы которого подключены к первому и второму входам трех-осевого механического акселерометра (поз.5). Выходы GSM модема (поз.9) подключены к входам управляющего микроконтроллера (поз.10), второй и третий информационные выходы которого подключены к flash-памяти (поз.6). Управляющий контроллер оборудован портом для его программирования, представляющем собой технологические входы/выходы (поз.16). Выходы свинцового аккумулятора (поз.11) подключены к плате управляющего контролера. Кроме контроллера бортового (поз.3) в состав автомобильной системы спутниковой навигации входят дисплей мультимедийный (поз.12) состоящий из GPS-автомагнитолы (поз.14) и платы сопряжения (поз.13) и мининоутбук (поз.19), имеющий доступ к сети Интернет (поз.18), к которой так же подключен телематический сервер (поз.20). Устройство работает следующим образом. При подаче питающего напряжения от бортовой сети автомобиля через плату интерфейсную на плату контроллера бортового, навигационный сигнал от навигационного космического аппарата (НКА) принимается приемной ГЛОНАСС/GPS антенной. С выхода антенны, усиленный и отфильтрованный сигнал поступает на вход ГЛОНАСС/GPS приемника. В приемнике происходит прием, преобразование, обработка сигналов НКА и выдаче готовых результатов решения навигационной задачи навигационных параметров (времени, координат, вектора путевой скорости) объекта в асинхронный последовательный порт UART (Universal Asynchronous Receiver/Transmitter - универсальный асинхронный приемопередатчик) ГЛОНАСС/GPS приемника на микроконтроллер и далее: - через GSM модем на телематический сервер; - в «черный ящик», при отсутствии связи с сервером; - в ДМ, для отображения местоположения на экране в окне навигационного ПО. Так же при подаче питающего напряжения на плату контроллера происходит включение и инициализация GSM-модема, проверка SIM-карты и регистрация изделия в GSM-сети. После регистрации SIM-карты с использованием технологии GPRS, происходит соединение с телематическим сервером. Связь с телематическим сервером осуществляется по протоколу TCP/IP, обеспечивающему большую надежность, поскольку по этому протоколу производится проверка на наличие ошибок и обмен подтверждающими сообщениями. Данные пересылаются пакетами (TCP-сегментами), которые состоят из заголовков TCP и данных. TCP - надежный протокол, потому что в нем используются контрольные суммы для проверки целостности данных и отправка подтверждений, чтобы гарантировать, что переданные данные приняты без искажений. В случае, если связь с телематическим сервером установить не удалось, происходит накопление поступающих от ГЛОНАСС/GPS приемника навигационных параметров во внутренней энергонезависимой FLASH-памяти. При установлении связи с телематическим сервером начинается передача накопленных навигационных параметров о движении подвижного объекта и информации сработавших датчиков подвижного объекта на телематический сервер. Передача навигационных параметров о движении подвижного объекта на телематический сервер может происходить в одном из следующих режимов: - режим «он-лайн» - ежеминутной отправки навигационных параметров о движении подвижного объекта; - режим автоматической передачи навигационных параметров о движении подвижного объекта через заданный (настраиваемый) интервал времени от 30 секунд до 1 часа; - режим передачи навигационных параметров о движении подвижного объекта по запросу пользователя. Выбор режима передачи навигационных параметров задается пользователем с помощью подачи на технологические входы ACCH специальных команд управления. Переданные с помощью GSM-связи посредством GPRS на телематический сервер навигационные параметры подвижного объекта используются для отображения местоположения отслеживаемого объекта на электронной карте (на экране монитора пользователя). При отображении местоположения отслеживаемого объекта на электронной карте возможно как графическое, так и текстовое представление истории перемещения подвижного объекта. Контроль за подвижным объектом может осуществляться двумя способами: а) при помощи карманного персонального компьютера (через услугу Web-доступа); б) при помощи персонального компьютера, подключенного к сети Интернет. Выбор режима передачи навигационных параметров задается пользователем с помощью подачи на технологические порт КБ специальных команд управления. Одновременно с описанным выше процессом работы навигационного приемника при подаче питающего напряжения на плату управляющего контроллера происходит включение и инициализация GSM-модема, проверка SIM-карты и регистрация в GSMсети. Соединение с телематическим сервером происходит по каналу GSM-связи с использованием GPRS технологии. Акселерометр, независимо от сигналов навигационного приемника определяет наличие и отсутствие движения отслеживаемого объекта. В случае продолжительной неподвижности отслеживаемого объекта навигационный приемник для экономии энергии аккумулятора выключается. Выключение и последующее включение навигационного приемника при возобновлении движения отслеживаемого объекта происходит по команде интеллектуального коммутатора питания (ИКП), расположенного на плате управляющего контроллера. Основными особенностями ИКП являются: - возможность работы в одном из трех режимов пониженного потребления: 1) ждущий режим работы; 2) режим пониженного потребления энергии с работающими часами реального времени; 3) режим пониженного потребления энергии; - возможность запуска из дежурного режима сигналом внешнего прерывания или сигналом от часов реального времени; - наличие двух 32-разрядных и двух 16-разрядных таймеров; - наличие сторожевого таймера; - наличие мало-потребляющих часов реального времени с независимым питанием и отдельным входом тактирования; - возможность программирования внутри системы (ISP) и внутри приложения (IAP) при помощи встроенной программызагрузчика. С помощью датчика движения, представляющего собой механический трехосный (XYZ) акселерометр с интегрированной электроникой, осуществляется определение состояния (покоя или движения), в котором находится изделие в данный момент. При работе изделия автоматически ведется журнал изменений состояния изделия с временной привязкой. Текущие настройки и журнал работы хранятся во флэш-памяти Data Flash. Считывание журнала из Data Flash осуществляется через порт RS-232 при помощи специальной утилиты. Примерный вид журнала работы: 02.02.09 11:10:20 выключение ACCH с подтверждением от сервера 02.02.09 12:23:20 включение ACCH по факту движения Алгоритм работы ИКП представлен на фиг.2. На фиг.2 обозначены операции: A1 - включение ИКП; A2 - Включение питания ACCH, запуск таймера индикации движения (T5), запуск таймера отсутствия движения (T1); A3 - Перезапуск таймера отсутствия движения (T1); A4 - Опрос датчика движения; A5 - Детектирование факта движения; A6 - Проверка превышения временного интервала T1; A7 - Отправка запроса на телематический сервер о разрешении отключения питания ACCH; A8 - Запуск таймера ожидания подтверждения (T2); A9 - Проверка превышения временного интервала T2 или наличия ответа от телематического сервера о разрешении отключения питания ACCH; A10 - Выключение питания ACCH; A11 - Установка признака движения (установка соответствующего флага в энергонезависимой памяти контроллера); A12 - Запуск таймера энергосбережения (T3); A13 - Опрос датчика движения; A14 - Детектирование факта движения; A15 - Проверка превышения временного интервала T3; A16 - Остановка и сброс таймера энергосбережения; A17 - Включение питания ACCH; A18 - Включение питания ACCH; A19 - Запуск таймера кратковременной работы T4; A20 - Установка признака движения (установка соответствующего флага в энергонезависимой памяти контроллера); A21 - Опрос датчика движения; A22 - Перезапуск таймера отсутствия движения; A23 - Детектирование факта движения; A24 - Проверка превышения временного интервала T4; A25 - Установка признака движения (установка соответствующего флага в энергонезависимой памяти контроллера); A26 - Выключение питания ACCH; A27 - Останов и сброс таймера кратковременной работы; A28 - Проверка превышения временного интервала T5; A29 - Перезапуск таймера индикации движения; A30 - Проверка установки признака движения (установки соответствующего флага в энергонезависимой памяти контроллера); A31 - Сброс признака движения (сброс соответствующего флага в энергонезависимой памяти контроллера); A32 - Выдача сигнала о наличии движения. Режимы работы ИКП: Включение; Режим слежения; Режим отключения выходного питания; Ждущий режим; Выход из ждущего режима. Описание режимов работы ИКП. «Включение». После включения ACCH в штатном режиме осуществляется самодиагностика состояния ACCH, включение ИКП, после чего от микроконтроллера подается команда на выдачу напряжения питания для включения ACCH, в микроконтроллере запускается таймер отсутствия движения T1 и таймер индикации движения T5. По умолчанию таймер отсутствия движения настроен на время 240 минут (4 часа). При подключении входного питания запускается таймер слежения за движением. Таймер индикации движения T5, отмерив заданный интервал времени, автоматически перезапускается снова, при этом если за интервал работы таймера индикации движения произошло движение, то по окончании интервала работы таймера на информационный вход микроконтроллера посылается сигнал о движении. Если движения не было, то ничего не посылается. «Режим слежения» Определение состояния (покоя или движения) осуществляется с помощью датчика движения. Сигналом Есть движение от датчика движения осуществляется сброс таймера отсутствия движения T1. Таким образом, если за заданный в таймере отсутствия движения промежуток времени не было движения подвижного объекта, то выдается запрос на сервер о разрешении отключения выходного питания. «Режим отключения питания» После получения от сервера подтверждения о разрешении отключения выходного питания или по истечении заданного времени ожидания подтверждения (по умолчанию 2 минуты), от микроконтроллера выдается команда на отключение выходного питания, при этом микроконтроллер переходит в ждущий режим работы. «Ждущий режим» При переходе в ждущий режим работы в микроконтроллере запускается таймер энергосбережения. В этом случае питание на изделия будет подано либо по истечению этого таймера, либо при обнаружении датчиком движения факта движения подвижного объекта. По умолчанию таймер энергосбережения настроен на время 480 минут (8 часов). «Выход из ждущего режима» В том случае, если питание изделие подано по истечению таймера энергосбережения, в микроконтроллере происходит запуск другого таймера - таймера кратковременной работы, отсчитывающего время (по умолчанию 10 мин.), которое дается на работу изделия после его включения по истечению таймера энергосбережения. По истечении таймера кратковременной работы (10 мин.), выдается запрос на сервер о разрешении отключения питания. Затем после получения подтверждения о разрешении отключения выходного питания или по истечении заданного времени ожидания подтверждения, от микроконтроллера на коммутатор питания выдается команда на отключение выходного питания. После этого коммутатор питания прекращает выдачу выходного питания, при этом микроконтроллер переходит в ждущий режим работы и т.д. В том случае, если питание на изделие было подано по факту движения, то изделие переходит в режим слежения, а в микроконтроллере запускается таймер отсутствия движения. Временные интервалы T1÷T4 являются настраиваемыми и задаются при конфигурировании. Имеется несколько состояний работы ИКП: 1) Включение и выключение питания; 2) Включение питания по таймеру; 3) Включение по факту движения; 4) Выключение питания с подтверждением от сервера; 5) Выключение питания без подтверждения от сервера. Структурная схема ИКП показана на Фиг.3. Режимы работы ACCH Начальный этап. Включение. Инициализация После включения питания, происходит инициализация ACCH: запуск ГЛОНАСС/GPS приемника, включение и инициализация модема. ГЛОНАСС/GPS приемник начинает вычисление текущего географического расположения, модем осуществляет проверку SIM карты, регистрацию в сети. Далее происходит соединение с сервером, передача архивных сообщений. После этого прибор переходит в нормальный режим работы. «Нормальный режим работы». В этом режиме происходит сбор и обработка информации о параметрах движения и подготовка сообщений к передаче на сервер. Передача сообщений на сервер осуществляется по мере возникновения новых событий - периодических и внеочередных. К внеочередным событиям относятся: - запрос с сервера; - начало движения; - превышение максимальной скорости; - увеличение пройденного пути. Реакция ACCH на события настраивается как консольными командами, так и командами с сервера. По умолчанию в ACCH используются следующие настройки: - интервал передачи в движении - 60 с; - интервал передачи в неподвижном состоянии - 300 с; - превышение скорости - 110 км/ч; - увеличение пройденного пути - выключено. Существует два устойчивых состояния - «неподвижное состояние» и «движение». Переход из одного в другой осуществляется при достижении подвижным объектом определенной скорости. В режиме «неподвижного состояния» не анализируются изменения курса и координат, сообщение на сервер отправляется только по таймеру. «Режим отсутствия связи с сервером». В случае, когда связь с сервером установить не удалось, ACCH накапливает поступающую информацию во внутренней двухуровневой энергонезависимой памяти. Объем этой памяти достаточен для хранения информации, поступающей от ACCH, в течение от 1 недели до нескольких месяцев, в зависимости от интенсивности потока поступающей информации и размера записей в потоке. При восстановлении связи с сервером ACCH начинает передавать накопленные данные на сервер. Приоритет отдается текущим данным, архивные данные передаются в свободные от передачи текущих данных промежутки в порядке поступления в архив. Режим слабого (или отсутствия) сигнала ГЛОНАСС/GPS В случае если сигнал от необходимого количества спутников недостаточен для определения координат или отсутствует совсем, ACCH передает на сервер координаты последней определенной точки, с пометкой, что данные устарели и недостоверны. - позволяет определять местоположение объектов на электронной карте местности в режиме реального времени, контролировать состояние подвижных объектов, планировать графики и маршруты движения объектов и контролировать их выполнение. - мониторинг местоположения подвижных объектов в режиме реального времени; - отображение местоположения, направления движения подвижных объектов на электронной карте и в виде текстового пояснения на экране монитора; - составление пользователем зон контроля любой конфигурации (многоугольники, коридоры, окружности) в специальном редакторе; - составление и сохранение заданий на прохождение заданного пользователем количества контрольных зон в заданном порядке с возможностью назначения неограниченного количества временных окон для каждой зоны; - назначение маршрутных заданий одному или нескольким подвижным объектам вручную или автоматически по заданному графику работы; - возможность оперативного изменения маршрутных заданий в процессе выполнения; - протоколирование действий пользователя; - автоматический контроль выполнения маршрутных заданий с сигнализацией их нарушений; - ведение журнала нарушений; - наличие глобальных контрольных зон, контролируемых для каждого подвижного объекта, независимо от текущего задания; - контроль прохождения установленных зон в заданный период времени; - формирование отчетов о движении; - автоматическое создание резервных копий; - хранение полученной информации в базе данных; - возможность работы СПО без использования картографии; - возможность одновременной работы со всеми картографическими файлами, доступными программе; - возможность обращения пользователя к встроенной в программу базы данных адресов крупных городов России; - наличие стандартных пользовательских профилей: администратор, пользователь, гость; - несколько уровней прав доступа к функциям: полный доступ, просмотр и изменение, только просмотр; - возможность настройки прав доступа к любой функции программы или объекту мониторинга отдельно; - возможность создания произвольных профилей пользователей; - возможность перевода пользователем любого слова в интерфейсе; - возможность задания языка интерфейса для каждого пользователя индивидуально; - многоуровневая справочная система с перекрестными ссылками, встроенная в интерфейс; - наличие контекстной справки во всех интерфейсных окнах; - прием и обработку данных от телематического сервера. - определение координат подвижного объекта производится с помощью аппаратуры совмещенного приема сигналов спутниковых радионавигационных систем: GPS, ГЛОНАСС; - для обеспечения энергосберегающего режима использована схема интеллектуального коммутатора питания (ИКП) с усовершенствованным алгоритмом работы, позволяющим отключать питающее напряжение ACCH в случае длительной неподвижности отслеживаемого объекта (TC) и включать его по возобновлению движения подвижного объекта (TC); - наличие в составе ACCH мининоутбука с доступом к сети Интернет, позволяет пользователю самостоятельно определять местоположение отслеживаемого объекта на электронной карте местности, находясь вне автомобиля; - наличие периодического самотестирования навигационной аппаратуры, установленной на подвижном объекте, получение достоверных сведений о работоспособности прибора с записью результатов тестирования в журнал событий прибора; - предусмотрена возможность проведения пользователем дистанционной технической диагностики навигационной аппаратуры, установленной на подвижном объекте с помощью управляющих команд; - обеспечивается повышение надежности функционирования и расширение функциональных возможностей системы посравнению с рассмотренными аналогами. Применение системы в этих областях будет способствовать: - увеличению эффективности контроля и оперативности; - повышению автоматизации процессов реагирования и взаимодействия; - повышению уровня сервиса и безопасности. Формула полезной модели 1. Автомобильная система спутниковой навигации для определения местоположения подвижных объектов состоит из контроллера бортового, в состав которого входят плата управляющего микроконтроллера, на которой расположены управляющий микроконтроллер, GSM модем, трехосевой механический акселерометр, flash-память, приемник GPS/ГЛОНАСС, интеллектуальный коммутатор питания и технологические входы/выходы, плата интерфейсная, на которой расположены повышающий импульсный стабилизатор напряжения, подключенный к плате контроллера бортового, преобразователь уровней для шины RS232, подключенный к управляющему микроконтроллеру, светодиодные индикаторы, подключенные к управляющему микроконтроллеру, также в состав контроллера бортового входят антенна GPS/ГЛОНАСС, подключенная к радиочастотному входу приемника GPS/ГЛОНАСС, GSM-антенна, подключенная к радиочастотному разъему GSM модема, выходы приемника GPS/ГЛОНАСС подключены к управляющему микроконтроллеру, первый и второй информационные выходы которого подключены к первому и второму входам трехосевого механического акселерометра, выходы GSM модема подключены к входам управляющего микроконтроллера, второй и третий информационные выходы которого подключены к flash-памяти, выходы интеллектуального коммутатора питания подключены к управляемому микроконтроллеру, управляющий микроконтроллер оборудован портом для его программирования, представляющим собой технологические входы/выходы, также в состав контроллера бортового входит свинцовый аккумулятор, выходы которого подключены к плате микроконтроллера, также в состав автомобильной системы спутниковой навигации входят дисплей мультимедийный, состоящий из GPS-автомагнитолы, платы сопряжения, и мини-ноутбук, имеющий доступ к сети Интернет, к которой также подключен телематический сервер, и карманный персональный компьютер. 2. Система навигации по п.1, отличающаяся тем, что GSM-антенна выполнена с возможностью передачи и приема данных через средства обеспечения GPRS-обмена. 3. Система навигации по п.2, отличающаяся тем, что GPRS-обмен данных происходит через сеть Интернет с мини-ноутбуком, с персональный компьютером, с карманным персональный компьютером, с телематическим сервером.