ОЦЕНКА ЭФФЕКТИВНОСТИ РЕАЛИЗАЦИИ
реклама

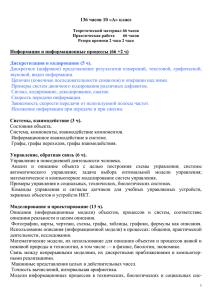
ОЦЕНКА ЭФФЕКТИВНОСТИ РЕАЛИЗАЦИИ АЛГОРИТМОВ АДАПТИВНОЙ ФИЛЬТРАЦИИ НА БАЗЕ «СИСТЕМ НА КРИСТАЛЛЕ» СЕРИИ «МУЛЬТИКОР» В.И. Джиган ГУП НПЦ «ЭЛВИС», [email protected] Адаптивная фильтрация является важной составной частью современной цифровой обработки сигналов (ЦОС). Теоретические и практические результаты, полученные в этой области, широко применяются в изделиях электронной техники, радиотехники, связи и ряда других областей. Например, адаптивные фильтры используются в компенсаторах сигналов электрического и акустического эха, выравнивателях электрических и акустических каналов, адаптивных антенных и акустических решетках [1-3]. В большинстве случаев, в таких устройствах применяются адаптивные фильтры, функционирующие на основе простейших с вычислительной точки зрения градиентных алгоритмов по критерию наименьшего среднеквадратичного отклонения (Least Mean Square, LMS, или Normalized LMS, NLMS). Эти алгоритмы обладают наименьшей вычислительной сложностью (числом арифметических операций, требуемых для выполнения одной итерации в течение интервала дискретизации обрабатываемых сигналов) и алгоритмической простотой (несложными математическим описанием) по сравнению с другими алгоритмами адаптивной фильтрации. Вычислительная сложность простейших адаптивных алгоритмов равна 2 N арифметических операций - умножений со сложениями (действительных или комплексных, в зависимости от вида обрабатываемых сигналов), где N - число весовых коэффициентов адаптивного фильтра. Однако простейшие алгоритмы обладают низкой эффективностью в терминах медленной сходимости и значений остаточных ошибок на выходе адаптивного фильтра в установившемся режиме, зависящих от величины параметра, называемого шагом сходимости. Указанные недостатки градиентных алгоритмов особенно проявляются при обработке нестационарных сигналов. Простые алгоритмы адаптивной фильтрации можно рассматривать как частные случаи более сложных рекурсивных алгоритмов наименьших квадратов (Recursive Least Squares, RLS) [4] или алгоритмов аффинных проекций (Affine Projections, AP) [5, 6]. Объяснение этого утверждения приведено в [7]. Более сложные адаптивные алгоритмы обеспечивают и более высокие показатели качества (большая скорость сходимости алгоритма, меньшие значения ошибок на выходе адаптивного фильтра в установившемся режиме) по сравнению с простейшими алгоритмами. Однако сложные RLS- и APалгоритмы не столь популярны в приложениях, поскольку для их реализации требуются большие вычислительные ресурсы. Так, для AP-алгоритмов эта сложность оценивается как O(NL) арифметических операций, для быстрых (вычислительно эффективных, т.е. с малым числом арифметических операций) AP-алгоритмов (Fast AP, FAP) - как O( N L) , для RLS алгоритмов - как O( N 2 ) и для быстрых RLS алгоритмов – как O(N ) . Здесь L - размер проекции (длина скользящего окна, на котором определяется градиент). В тоже время, успехи, достигнутые современной микроэлектронной промышленностью в области создания высокопроизводительных цифровых сигнальных процессоров (ЦСП), в частности БИС класса система на кристалле (СнК) серии «Мультикор» [8], уже позволяют эффективно реализовывать сложные AP- и RLS-алгоритмы, которые лишены большинства недостатков простых адаптивных алгоритмов, а наличие прикладных библиотек, см. например [9], позволяет существенно ускорить разработку приложений. Прикладные библиотеки предлагают пользователям различных платформ проверенные вычислительные процедуры алгоритмов ЦОС: известные и оригинальные. ГУП НПЦ «ЭЛВИС» [10] является обладателем уникальной вычислительной платформы, известной как «МУЛЬТИКОР», и постоянно пополняемой прикладной библиотеки алгоритмов и программ для этой платформы. Сочетание этих передовых технологий ЦОС позволяет предприятию эффективно выполнять различные проекты в области радиоэлектроники. В настоящее время, данная библиотека содержит более 300 разновидностей адаптивных алгоритмов: LMS- и NLMS-алгоритмов, включая алгоритмы в частотной области; AP- и FAPалгоритмов, а также большое разнообразие RLS-алгоритмов, включая быстрые алгоритмы, а также алгоритмы с линейными ограничениями. Все эти алгоритмы разработаны для применения в самом общем случае - в многоканальных адаптивных фильтрах с неодинаковым числом комплексных весовых коэффициентов в каналах, см. рис. 1. 453 d (k ) x1 (k ) h HN1 (k 1)x N1 (k ) x2 (k ) h HN 2 ( k 1) x N 2 ( k ) h HN m xm (k ) Алгоритмы для одноканальных адаптивных фильтров или фильтров с действительными весовыми коэффициентами являются частными случаями алгоритмов для структуры, рис. 1. Отдельный канал многоканального фильтра представлен на рис. 2. Это фильтр с конечной импульсной характеристикой (КИХ), обрабатывающий входной дискретный сигнал x m (k ) . N , χ (k ) (k 1)x N m (k ) xM 1 (k ) h HN M 1 (k 1)x N M 1 (k ) xM (k ) h HNM (k 1)x N M (k ) Выходной сигнал такого фильтра y m (k ) формируется на основе взвешенного суммирования задержанных отсчетов входного сигнала x m (k ) . Здесь k - дискретное время, а N m число весовых коэффициентов фильтра m -го канала. Взвешивание сигналов осуществляется с помощью весовых коэффициентов h N m (k ) Адаптивный алгоритм h0, m , h1, m , , h N m 2, m , h N m 1, m формируется как χ TN (k ) xTN (k ), xTN (k ), , xTN (k ), , xTN 1 2 m ентов - как h HN (k ) h HN (k ), h HN (k ), , h HN (k ), , h HN 1 2 T закон изме- нения которых определяется алгоритмом адаптивной фильтрации. Вектор входных сигналов M -канального адаптивного фильтра Рис. 1. Адаптивный фильтр , m M 1 M 1 (k ), xTN (k ) , а вектор весовых коэффици- M (k ), h HN (k ) . Здесь и далее жирными строчными M символами обозначены векторы, а жирными заглавными - матрицы. Символы T и H означают операции транспонирования и эрмитово сопряжения (транспонирования и комплексного сопряжения, обозначаемого символом на рис. 2), соответственно. Нижние индексы N и N m обозначают число элементов в векторах и квадратных матрицах. В зависимости от решаемой задачи и типа x(k ) x(k 2) x(k N 2) x(k N 1) x(k 1) обрабатываемых сигналов z 1 z 1 z 1 адаптивные фильтры могут быть одноканальными или h ( k ) h0 (k ) h1 (k ) h2 (k ) hN 1 (k ) N 2 многоканальными с действительными или ком плексными весовыми коэффициентами. Например, y (k ) эхо-компенсатор модема проводного канала связи может рассматриваться как Управление два независимых адаптивных фильтра для подавлеРис. 2. КИХ фильтр m -го канала с переменными весовыми ния сигналов ближнего и коэффициентами дальнего эха, или как двухканальный адаптивный фильтр. В зависимости от типа модуляции, используемой в модеме, такой фильтр имеет действительные или комплексные весовые коэффициенты. Компенсатор акустического эха - это одноканальный адаптивный фильтр, а компенсатор стерео эха - это два двухканальных адаптивных фильтра с одинаковым числом действительных весовых коэффициентов в каналах. Выравниватель каналов связи (decision feedback equalizer) можно рассматривать как двухканальный адаптивный фильтр с неодинаковым числом весовых коэффициентов в каналах. Нелинейные полиномиальные адаптивные фильтры и адаптивные фильтры с бесконечной импульсной характеристикой (БИХ) тоже могут рассматриваться как многоканальные с неодинаковым числом весовых коэффициентов в каналах. Узкополосные адаптивные антенные решетки - это многоканальные адаптивные фильтры с одним комплексным весовым коэффициентом в каждом канале, а широкополосные гидроакустические решетки - это многоканальные адаптивные фильтры с одинаковым числом действительных весовых коэффициентов в каналах. Таким образом, необходимость разработки адаптивных алгоритмов для такой структуры, как фильтр, рис. 1, обусловлена тем, что существуют задачи, где такие фильтры находят применение. Возможность использования неодинакового числа весовых коэффициентов в каналах фильтра позволяет уменьшить требования к вычислительным ресурсам ЦСП, необходимых для реализации адап- 454 тивных алгоритмов, поскольку эти ресурсы пропорциональны полному числу весовых коэффициенM тов фильтра, равному N N m . m 1 Большую часть рассматриваемой библиотеки составляют RLS-алгоритмы адаптивной фильтрации [4]. Такие алгоритмы являются результатом решения задачи минимизации по критерию наименьших квадратов следующего функционала k E (k ) k i d (i) h HN (k )χ N (i) . 2 (1) i p Здесь d (k ) - требуемый сигнал, см. рис. 1. Параметр служит для экспоненциального взвешивания обрабатываемых сигналов. При обработке нестационарных сигналов этот параметр позволяет регулировать следящие свойства адаптивного фильтра в небольших пределах. Допустимое значение ограничено числом весовых коэффициентов фильтра как max 1 0,4 / N m 1 , т.е. не может быть сколь угодно малым для обеспечения слежения за быстроменяющимися сигналами. Если значение меньше указанной нижней границы, то адаптивный фильтр становится неустойчивым, т.е. на практике - это число, близкое к единице. Если минимизация функционала (1) осуществляется при условии C HNJ h N (k ) f J , где C NJ матрица J линейных ограничений и f J - вектор J значений ограничиваемых параметров, то RLSалгоритм называется линейно-ограниченным [11]. Здесь двумя нижними индексами обозначен размер (число элементов N J ) прямоугольной матрицы. Решением рассматриваемой задачи (1) является вектор весовых коэффициентов адаптивного фильтра, определяемый как (2) h N (k ) R N1 (k )rN (k ) , где R N (k ) - корреляционная матрица сигналов адаптивного фильтра, а rN (k ) - вектор взаимной корреляции χ N (k ) и d (k ) . Если в уравнении (1) значение параметра p 1 , то определение корреляционной матрицы и вектора взаимной корреляции осуществляется на бесконечном окне с экспоненциальным взвешиванием, рис. 3, а если p k L 1 , - то на скользящем окне с экспоненциальным взвешиванием, рис. 4. Подобно экспоненциальному взвешиванию, скользящее окно k i χ N (i ) - это прием, позволяющий обрабатывать нестационарные сигналы. В оценках матi 1: k рицы R N (k ) и вектора rN (k ) , определяемых на скользящем окне, используется конечное число выборок L . Значение L i определяется интервалом стационарности 01 k обрабатываемых сигналов T как L TFs , где Fs - частота дискретизации. Вычислительная сложность RLS-алгоритмов со скользящим окном примерно в два раза больше вычислительной сложности алгоk i χ N (i ) ритмов с бесконечным окном. Фактором, k2 L 1 влияющим на увеличения вычислительной k1 L i k L 1: k сложности алгоритмов, также является умножение ряда переменных, участвуюk2 L щих в вычислениях, на параметр . При i обработке стационарных сигналов и в ряде 012 k1 k2 случаев при обработке нестационарных L сигналов, параметр можно исключить L из вычислений, установив 1 . Это соответствует случаю равномерного взвешивания обрабатываемых сигналов. Как уже отмечалось, значение паРис. 4. Скользящее окно с экспоненциальным раметра примерно равно единице, повзвешиванием скольку при малых значениях адаптивный фильтр становится нестабильным. К нестабильности адаптивного фильтра может приводить и конечное число выборок L в случае использования скользящего окна. В конечном итоге, оба этих фактора могут приводить к плохо обусловленной и необратимой корреляционной матрице R N (k ) и, как следствие, - к нестабильности адаптивного фильтра. Рис. 3. Бесконечное окно с экспоненциальным взвешиванием 455 Эффективным способом стабилизации обращения плохо обусловленных корреляционных матриц является их динамическая регуляризация [12]. Использование этого приема в RLS-алгоритмах увеличивает примерно в два раза вычислительную сложность регуляризированных алгоритмов по сравнению с нерегуляризированными. Регуляризация может применяться в алгоритмах со скользящим и с бесконечным окнами. В основе большинства RLS-алгоритмов находятся методы обращения матриц, см. например [1, 4], которые используются в уравнении (2) для обращения корреляционной матрицы. В силу последовательного характера модификации этой матрицы за счет применения скользящего окна или динамической регуляризации, все вычисления в RLS-алгоритмах, обусловленные независимыми потоками обрабатываемых данных, также носят последовательный характер. Это является причиной двух- или четырехкратного увеличения вычислительной сложности таких RLS-алгоритмов в случае их реализации с помощью одного ЦСП. В [13] были рассмотрены приемы, на основе которых разработан ряд RLS-алгоритмов, ориентированных на параллельные вычисления. В таких алгоритмах параллельные потоки данных, обусловленные модификацией корреляционной матрицы за счет скользящего окна и регуляризации, могут обрабатываться независимо, т.е. параллельно. Это позволяет уменьшить вычислительную нагрузку на один процессор при наличии двух или четырех ЦСП. Такие процессоры сейчас интегрируются в одной БИС [8], что позволяет строить компактные устройства ЦОС, и делает разработку параллельных алгоритмов адаптивной фильтрации актуальной задачей. Параллельные алгоритмы ориентированы, в частности, на реализацию в перспективных БИС серии «Мультикор» с несколькими ЦСП в одном кристалле, которые разрабатываются в настоящее время в ГУП НПЦ «ЭЛВИС». Таким образом, основными причинами наличия большого числа разновидностей RLSалгоритмов адаптивной фильтрации являются использование бесконечного или скользящего окна, наличие или отсутствие экспоненциального взвешивания сигналов, наличие или отсутствие динамической регуляризации корреляционной матрицы, наличие или отсутствие линейных ограничений, а также использование одного, двух или четырех ЦСП для реализации алгоритмов, см. рис. 5. RLS-алгоритмы адаптивной фильтрации С бесконечным экспоненциально взвешенным окном С бесконечным равномерным окном Без регуляризации Без ограничений Для реализации с помощью одного процессора С динамической регуляризацией С линейными ограничениями Без регуляризации Параллельные для реализации с помощью двух процессоров С динамической регуляризацией Со скользящим экспоненциально взвешенным окном Со скользящим равномерным окном Без регуляризации Без ограничений Для реализации с помощью одного процессора С динамической регуляризацией С линейными ограничениями Без регуляризации Параллельные для реализации с помощью двух процессоров С динамической регуляризацией Без ограничений С линейными ограничениями Параллельные для реализации с помощью четырех процессоров Рис. 5. Многообразие RLS-алгоритмов адаптивной фильтрации Базовые RLS-алгоритмы, наполняющие рис. 5, представлены на рис. 6. Это алгоритмы с вычислительной сложностью O( N 2 ) (не быстрые) на основе леммы об обращении матриц (ЛОМ) и быстрые алгоритмы на основе ЛОМ с вычислительной сложностью O(N ) : быстрый алгоритмы Калмана (Fast Kalman FK), Fast Transversal Filter (FTF), Fast a Posteriori Error Sequential Technique (FAEST) и стабилизированный FAEST-алгоритм. Многообразие RLS-алгоритмов на основе QRразложения матрицы входных сигналов адаптивного фильтра включает алгоритмы, использующие прямое и обратное QR-разложение с применением вращений Гивенса или преобразований Хаусхолдера. Особенностью RLS-алгоритмов на основе QR-разложения является наличие в них операций извлечения квадратного корня. В рассматриваемой библиотеке представлены QR RLS-алгоритмы с операциями квадратного корня и без таких операций. Исключение операций квадратного корня в RLSалгоритмах достигается путем масштабирования переменных [14]. В состав QR RLS-алгоритмов также входят быстрые алгоритмы. 456 В основе всех многоканальных быстрых RLSалгоритмов библиотеки находятся приемы [15], использующие перестановочные матриНа основе QRНа основе ЛОМ разложения цы. Эти приемы позволяют получать вычислительные проНе быстрый Прямого Обратного цедуры M -канальных фильтров с неодинаковым числом Не быстрый с весовых коэффициентов в каБыстрые операциями квадратного корня налах N m в виде последоваБыстрый алгоритм Не быстрый без операций тельности M однотипных выКалмана квадратного корня числительных процедур для вспомогательных фильтров с С операциями FTF Без квадратного корня квадратного корня одинаковым числом весовых коэффициентов, равным N . Не быстрый с Не быстрый с FAEST преобразованиями RLS-алгоритмы бибвращениями Гивенса Хаусхолдера лиотеки не включают в себя Стабилизированный Не быстрый с Быстрый с вращениями алгоритмы с равномерным FAEST вращениями Гивенса Гивенса взвешиванием. Такие алгоритмы легко получаются из алгоБыстрый с вращениями Гивенса ритмов с экспоненциальным взвешиванием при значении параметра 1 . Рис. 6. Основные типы RLS алгоритмов библиотеки Вторыми по численности в библиотеке являются AP- и FAP-алгоритмы, включая AP-алгоритмы с линейными ограничениями [16]. Многообразие этих алгоритмов определяется различными модифицированными процедурами линейного предсказания, лежащими в основе быстрых RLS-алгоритмов адаптивной фильтрации со скользящим окном. Такие процедуры используются как составная часть FAP-алгоритмов. В случае применения параллельных процедур RLS-алгоритмов со скользящим окном в многоканальных FAPалгоритмах, число параллельно обрабатываемых потоков данных равно 2M . Следует отметить, что разработка рассматриваемой библиотеки алгоритмов адаптивной фильтрации начиналась в части получения вычислительных процедур быстрых RLS-алгоритмов со скользящим окном [17] с целью их использования в FAP-алгоритмах [5, 6]. Небольшую часть библиотеки составляют LMS- и NLMS-алгоритмы, включая алгоритмы с переменным шагом сходимости, изменяемым по градиентному закону, и алгоритмы с линейными ограничениями. Переменный шаг сходимости также используется в AP- и FAP-алгоритмах [6]. Кроме того, в библиотеку входят LMS- и NLMS-алгоритмы в частотной области с использованием процедур быстрого преобразования Фурье. Каждый из алгоритмов прикладной библиотеки имеет программный MATLABпрототип. MATLABРис. 7. Графический интерфейс пользователя функции алгоритмов могут быть использованы для построения моделей раннее упомянутых адаптивных устройств при проектировании радиоэлектронных устройств и систем. Кроме того, алгоритмы библиотеки интегрированы в графический интерфейс пользователя (ГИП), рис. 7. ГИП - это инструмент, с помощью которого можно исследовать свойства интересуемого алгоритма адаптивной фильтрации, функционирующего под воздействием внутренних тестовых сигнаОсновные RLS алгоритмы 457 лов, или исследовать работу адаптивного фильтра в составе устройства. В последнем случае используются внешние сигналы, передаваемые ГИП в виде файлов данных. ГИП позволяет выбирать интересуемый алгоритм, определять число каналов адаптивного фильтра (одноканальный или многоканальный) и тип используемой арифметики (действительная или комплексная). Параметры, зависящие от типа алгоритма, расположены в нижней части ГИП. Это число каналов адаптивного фильтра, число коэффициентов в каждом из этих каналов, число коэффициентов импульсных откликов в каналах идентифицируемой линейной системы, амплитуды входных сигналов фильтра, уровень шума на входе требуемого сигнала, частота дискретизации, длина скользящего окна при вычислении параметра ERLE (Echo Return Loss Enhancement), число итераций алгоритма, шаг сходимости (в LMS-, NLMS-, AP- и быстрых AP-алгоритмах), параметр экспоненциального взвешивания сигналов и параметры начальной и динамической регуляризации (в RLS-алгоритмах), коэффициенты стабилизации (в быстрых RLS-алгоритмах), длина скользящего окна (в RLS-алгоритмах со скользящим окном), число ограничений, частоты ограничений и значения ограничиваемого параметра (в линейно-ограниченных алгоритмах). ГИП является достаточно простым с точки зрения пользования инструментом. В начале его работы отображается только ограниченный набор параметров, и выводятся сообщения, подсказывающие следующие действия. Параметры, неиспользуемые в выбранном алгоритме, недоступны для ввода или модификации. Неправильный ввод параметра сопровождается предупреждающим сообщением, а продолжение работы становится возможным только после изменения значений неправильных параметров на правильные параметры. Результатом моделирования любого из алгоритмов адаптивной фильтрации является набор графиков. Рис. 7 показывает, как выглядит ГИП после окончания моделирования и вывода одного из графиков. Каждый из графиков имеет масштаб по оси «X», определяемый длиной отображаемого вектора данных. График можно также отобразить на выбранном участке в пределах этой длины. Для отображения однородных параметров (например, входных сигналов многоканального фильтра), используется один и тот же масштаб по оси «Y», определяемый динамическим диапазоном совокупности значений всех однородных параметров. Графики могут также отображаться в автоматически выбранном масштабе по оси «Y». На них можно убирать или восстанавливать сетку. Графики можно дополнительно выводить в отдельном стандартном окне для последующего копирования, сохранения или печати. Входные/выходные сигналы моделирования могут быть сохранены в файлах данных для последующего использования в качестве тестовых векторов при переносе адаптивных алгоритмов на интересуемые языки программирования и вычислительные платформы. В настоящее время, некоторые вычислительные процедуры рассмотренных алгоритмов уже вошли в состав прикладной библиотеки программ БИС серии «Мультикор» [8], т.е. существуют в виде функций на языке программирования Assembler этих БИС. Данные функции являются коммерческим продуктом, рис. 8. Рис. 9 демонстрирует зависимость числа тактов, которые требуются для реализации NLMS- алгоритма в ядре ЦСП с плавающей точкой БИС серии «Мультикор» (МС-12 и МС-24) в зависимости от числа весовых коэффициентов N адаптивного фильтра: 1 многоканальный, с комплексными весовыми коэффициентами, МС-12; 2 одноканальный, с комплексными весовыми коэффициентами, МС-12; 3 многоканальный, с комплексными весовыми коэффициентами, МС-24; 4 одноканальный, с комплексными весовыми коэффициентами, МС-24; 5 Рис. 8. Библиотека алгоритмов адаптивной фильтрамногоканальный, с действительными ции весовыми коэффициентами, МС-12; 6 одноканальный, с действительными весовыми коэффициентами, МС-12; 7 - многоканальный, с действительными весовыми коэффициентами, МС-24; 8 - одноканальный, с действительными весовыми коэффициентами, МС-24. 458 Рис. 9. Вычислительная сложность (в числе тактов БИС серии «Мультикор») реализации NLMS-алгоритмов Ниже рассматривается пример оценки эффективности реализации NLMS-алгоритма для подавления электрического эха в соответствии со стандартом G.168 [18]. Схема такого устройства показана на рис. 10 [7]. Для значения N 128 , реализация адаптивного фильтра с действительными весовыми коэффициентами требует приблизительно 400 тактов БИС МС-12, см. рис. 9. При тактовой частоте данной БИС Fcl 100 МГц, минимальная длительность итерации алгоритма равна 400 /(100106 ) 4 мкс или максимальная частота дискретизации сигналов равна Fs (4 10 6 ) 1 250 кГц. Данное значение в 250/8 30 раз превыЦАП x(k ) шает требуемую частоту дискреОт удаленного тизации Fs 8 кГц. Это значит, абонента что при Fs 8 кГц и N 128 , на базе БИС МС-12 можно реализоw h N (k ) вать около 30 адаптивных фильтров, функционирующих на осноd ( k ) n( k ) ве NLMS-алгоритма с указанным ~ d (t ) d (k ) числом действительных весовых коэффициентов, или реализовать АЦП n (t ) e(k ) другой адаптивный алгоритм с От ближнего К удаленному абонента абоненту вычислительной сложностью, почти в 30 раз превышающей сложность такого NLMSРис. 10. Принцип подавления сигналов электрического алгоритма. Например, для одноэха канального варианта стабилизированного и регуляризированного быстрого RLS-алгоритма с действительными весовыми коэффициентами [4] необходимо 14 N арифметических операций на одну итерацию, что лишь в семь раз превышает вычислительную сложность рассмотренного NLMSалгоритма. Следовательно, для реализации такого RLS-алгоритма требуется лишь 100 (7 / 30) 23 % вычислительных ресурсов ядра ЦСП БИС МС-12. Оставшиеся ресурсы могут быть использованы для решения других задач. Это позволяет программно реализовать эффективный компенсатор сигналов электрического эха в виде законченного устройства, т.е. СнК. Использование БИС МС-24, см. рис. 9, позволяет реализовать алгоритмы адаптивной фильтрации с вычислительной сложностью, примерно в два раза большей, чем при использовании БИС МС-12. Таким образом, в настоящей работе представлена большая библиотека алгоритмов адаптивной фильтрации, ориентированных на реализацию в современных высокопроизводительных БИС класса СнК. Библиотека постоянно пополняется за счет разработки новых алгоритмов и их реализации на языке Assembler БИС серии «Мультикор». В частности, в настоящее время разрабатываются модели лестничных RLS-алгоритмов, а в перспективе алгоритмы для КИХ-фильтров будут дополнены алгоритмами для БИХ-фильтров. Библиотека алгоритмов может служить полезным инструментом для инженеров и исследователей, которые используют адаптивную фильтрацию в своих разработках. Она может также найти применение в учебных курсах современной ЦОС, обработки речи и ряда других дисциплин. Данная библиотека является мостом между разработчиками и возможностями, предоставляемыми современными ЦСП для реализации алгоритмов ЦОС, на пути использования сложных, но эффективных, алгоритмов адаптивной фильтрации в приложениях связи, радиолокации, бытовой электроники и ряда других областей. Использование таких алгоритмов позволит придать этим приложениям новое качество, которое трудно, а порой и невозможно, достичь без применения адаптивной обработки сигналов или даже с применением простых адаптивных алгоритмов. Несмотря на очевидные преимущества сложных алгоритмов, на практике, по-прежнему, в основном используются 459 простейшие адаптивные алгоритмы, так как они имеют несложное математическое описание и для их реализации требуются небольшие вычислительные ресурсы. Представленная в работе библиотека содержит более 300 алгоритмов адаптивной фильтрации, которые могут быть использованы в качестве моделей при проектировании радиоэлектронных устройств и систем, а также в качестве прототипов при реализации алгоритмов на различных вычислительных платформах, в частности, на базе БИС класса СнК серии «Мультикор». Использование элементов библиотеки позволяет ускорить разработку адаптивных приложений, а использование сложных алгоритмов адаптивной фильтрации и высокой производительности БИС серии «Мультикор» - получить новое качество этих приложений. ЛИТЕРАТУРА 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. Sayed A.H. Fundamentals of adaptive filtering. - NJ, Hoboken: John Wiley and Sons, Inc., 2003. – 1125 p. Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. Введение в теорию. Пер. с англ. Челпанова В.Г., Лексаченко В.А. - М.:Радио и связь, 1986. - 448 с. Benesty J., Huang Y. (Eds). Adaptive signal processing: applications to real-world problems. - Berlin, Heidelberg, New York: Springer-Verlag, 2003. - 356 p. Джиган В.И. Многоканальные RLS- и быстрые RLS-алгоритмы адаптивной фильтрации // Успехи современной радиоэлектроники. - 2004. - № 11. - С. 48-77. Gay S.L. A fast converging, low complexity adaptive filtering algorithm // Third International Workshop on Acoustic Echo Control. - Plestin les Greves, France. - 1993. - P. 223-226. Djigan V.I. Improved fast affine projection algorithm with gradient adaptive step-size // Proceedings of the 3-rd International Conference on Antennas, Radiocommunication Systems & Means (ICARSM-97). Voronezh. - 26 - 29 May 1997. - V. 3. - P. 23-32. Джиган В.И., Солохина Т.В., Петричкович Я.Я. Подавление электрического эха на базе контроллеров «МУЛЬТИКОР» // Электроника: Наука, Технологии, Бизнес. - 2004. - № 8. - С. 26-33. Петричкович Я.Я., Солохина Т.В. Цифровые сигнальные контроллеры «МУЛЬТИКОР» - новые отечественные серии систем на кристалле // Доклады 6-й Международной конференции «Цифровая обработка сигналов и ее применения (DSPA-2004)» . - Москва. - 31 марта - 2 апреля 2004. – Т. 1. - С. 8 -15. Джиган В.И. Библиотека алгоритмов адаптивной фильтрации // Доклады 6-й Международной конференции «Цифровая обработка сигналов и ее применения (DSPA-2004)». - Москва. - 31 марта - 2 апреля 2004. – Т. 1. - С. 89-94. http://www.elvees.ru Resende L.S., Romano J.M.T., Bellanger M.G. A fast least-squares algorithm for linearly constrained adaptive filtering // IEEE Trans. Signal Processing. - 1996. - V. 44. - № 5. - P. 1168-1174. Gay S.L. Dynamically regularized fast RLS with application to echo cancellation // Proc. ICASSP'96. May 1996. - P. 957-960. Djigan V.I. Diversity of RLS for parallel implementation // Proceedings of the 5-th WSEAS International Conference on Information Science, Communications and Applications (ISCA-2005). - Cancun, Mexico. - May 12 – 15 2005. - 6 p. (CD). Hsieh S.F., Liu K.J.R., Yao K. A unified square-root-free approach for QRD based recursive least squares estimation // IEEE Trans. Signal Processing. - 1993. - V. 41. - № 3. - P. 1405-1409. Glentis G.A., Kalouptsidis N. Fast adaptive algorithms for multichannel filtering and system identification // IEEE Trans. Signal Processing. - 1992. - V. 40. - № 10. - P. 2433-2458. Джиган В.И. Уменьшение вычислительных затрат в линейно-ограниченном алгоритме аффинных проекций // Труды 60-й научной сессии, посвященной Дню Радио». - Москва, 17 - 19 мая 2005. – Т. 1. - С. 99-102. Djigan V.I. Unified approach to the fast time recursive least square adaptive filtering algorithms development // Proceedings of the 3-rd International Conference on Antennas, Radiocommunication Systems & Means (ICARSM-97). - Voronezh. - 26 - 29 May 1997. - V. 3. - P. 33-42. Digital network echo cancellers. ITU-T Recommendation G.168 // Series G: Transmission systems and media, digital systems and networks. International telephone connections and circuits - Apparatus associated with long-distance telephone circuits. – Geneva, June 2002. - 97 p. 460