The Quadcopter Controller
реклама

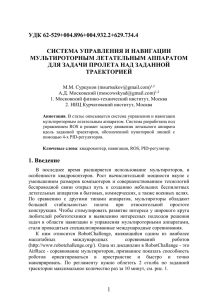
Плата управления квадрокоптером HobbyKing Введение Плата управления квадрокоптером HobbyKing контролирует четырёхпропеллерный вертолёт (Квадрокоптер). Её цель состоит в том, чтобы стабилизировать аппарат во время полета. Чтобы сделать это, сигналы от трех гироскопов (roll - крен, pitch - тангаж и yaw - рыскание) поступают в микроконтроллер Atmega328PA. Микроконтроллер обрабатывает эти сигналы согласно установленному программному обеспечению и формирует сигналы управления регуляторами оборотов электродвигателей (Electronic Speed Controllers - ESC). За счёт точного управления скоростью вращения пропеллеров стабилизируется Ваш квадрокоптер. Плата управления также использует сигналы от Вашего радиоприемника (RX) и передает их в Atmega328PA через входы Aileron - элероны, Elevator – руль высоты, Throttle - газ и Rudder – руль направления. Как только эта информация обработана, микроконтроллер отправляет сигналы в ESC, которые в свою очередь регулируют скорость вращения каждого двигателя, чтобы управлять полетом (вверх, вниз, назад, вперед, влево, вправо, разворот). Установка платы на Ваш квадрокоптер. На данной плате установлены пъезоэлектрические гироскопы Murata, которые менее чувствительны к вибрации, чем гироскопы типа SMD, но всё равно лучше установить её на виброизолирующем материале. Плата должна быть установлена белыми стрелками по направлению полета (Direction of Forword Flight). Соединяя Ваш радиоприёмник (RX) Вы должны соединить внутренние сигнальные выводы White (Signal) каналов (CH1, CH2, CH3 и CH4) соответственно: с Aileron - элероны, Elevator – руль высоты, Throttle - газ и Rudder – руль направления, в то время как красные (Red VCC - питание) провода соединены с центральными выводами, а черные провода (Black GND - земля) с крайними выводами. Разъёмы обозначенные от M1 до M4 соединяются с трёхпроводными выводами BEC регуляторов оборотов ESC по тому же правилу как и приёмник: сигнал - сигнал, питание – питание, земля - земля. ESC с двигателями подключенные к выводам M1 - M4 размещены в ниже следующем порядке. Чтобы поменять направление вращения двигателя на противоположное нужно поменять местами любые два из трёх соединений проводов ESC и двигателя. Квадрокоптер (конфигурация крестом) вид сверху Пропеллеры 2, 3 прямого вращения, 1, 4 обратного. Настройка платы 1. Проверка каналов передатчика: - Снимите пропеллеры. - Установите ручку газа на ноль (на передатчике левая назад до упора), включите передатчик (TX) и квадрокоптер. - Установите ручку газа приблизительно на ¼ (на передатчике левая вперёд на четверть всего хода). Двигатели должны запуститься. - Переместите ручку руля высоты вперед (на передатчике правая). Задний по направлению полёта двигатель должен увеличить обороты. В противном случае реверсируйте канал pitch (elevator). - Переместите ручку элерона налево (на передатчике правая). Правый двигатель должен увеличить обороты. В противном случае реверсируйте канал roll (aileron). - Переместите ручку руля направления налево (на передатчике левая). Передний и задний двигатели должны увеличить обороты. В противном случае реверсируйте канал yaw (rudder). 2. Регулировка ручки газа передатчика: - Включите передатчик и квадрокоптер. - Если светодиод не загорается уменьшите тримирование. - Если все еще никакие не идут, Вы, возможно, должны полностью реверсировать канал Throttle. - Перемещайте левую ручку передатчика вниз и направо пока не загорится светодиод. Если этого не происходит, настройте расходы газа и руля направления на Вашем передатчике. Удостоверьтесь, что у Вас на передатчике не включено никакое микширование. 3. Установки диапазонов ATV/servo передатчика: - Pitch (elevator): 50% - Roll (aileron): 50% - Yaw (rudder): 100% 4. Калибровка регуляторов оборотов ESC: - Установите потенциометр Yaw Gyro gain Adjustment на ноль. - Включите передатчик. - Установите ручку газа на максимум. - Включите квадрокоптер. - После звукового сигнала готовности дождитесь двойного сигнала от регуляторов. (Звуковые сигналы отличаются у разных моделей регуляторов) - Уберите газ до минимума. Регуляторы оборотов должны издать звуковой сигнал. - Выключите передатчик. - Верните потенциометр Yaw в изначальное положение. 5. Потенциометры регулировки усиления гироскопов предустановленны на 50 %. Увеличивайте усиление пока не начнутся быстрые колебания, затем уменьшайте пока устройство снова не стабилизируется. Для быстрого полёта вперёд усиление должно быть небольшим Слишком низкая чувствительность делает управление очень жестким и квадрокоптер может опрокинуться. 6. Проверка установок гироскопов: - Снимите пропеллеры. - Включите передатчик и квадрокоптер. - Установите газ примерно на 1/4. Двигатели должны запуститься. - Наклоните квадрокоптер вперед. Передний двигатель должен увеличить обороты. В противном случае реверсируйте гироскоп тангажа (pitch gyro). - Наклоните квадрокоптер налево. Левый двигатель должен увеличить обороты. В противном случае реверсируйте гироскоп крена (roll gyro). - Поверните квадрокоптер по часовой стрелке. Передний и задний двигатели должны увеличить обороты. В противном случае реверсируйте гироскоп рыскания (yaw gyro). 7. Реверсирование каналов гироскопов: - Установите потенциометр Roll Gyro gain Adjustment на ноль. - Включите передатчик и квадрокоптер. - Светодиод должен мигнуть 10 раз. - Переместите ручку передатчика соответствующую гироскопу, который Вы хотите реверсировать. Правая влево/вправо Правая вперёд/назад Левая вперёд/назад Левая влево/вправо CH1 - Aileron – элероны CH2 - Elevator - руль высоты CH3 - Throttle - газ CH4 - Rudder - руль направления Roll - крен Pitch - тангаж Yaw - рыскание - Светодиод будет мигать непрерывно. - Выключите квадрокоптер. - Выполните эти действия последовательно для всех гироскопов, которые необходимо реверсировать, после чего верните потенциометр Roll Gyro gain Adjustment в изначальное положение. 8. Финальная проверка: Поставьте квадрокоптер на землю, отойдите на безопасное расстояние и медленно увеличивайте газ до момента отрыва (не больше половины газа). Надо некоторое время подождать прибавлять газ потому, что калибровка гироскопов происходит при убранном газе в состоянии покоя аппарата. Если квадрокоптер начинает вращаться, проверьте пропеллеры и направления вращения моторов, если появляется раскачивание уменьшите усиление. Несильное вращение нормально. Попробуйте повернуть квадрокоптер. Это должно испытывать сопротивление Вашим движениям. Большее усиление гироскопа дает большее сопротивления. Если начинаются колебания, уменьшите усиление. Старайтесь не уменьшать усиление ниже 40 %. Замечание: как правильно взлететь: 1: Сначала квадрокоптер и его пропеллеры должны быть неподвижными. 2: Калибровка гироскопов завершается при убранном газе. Увеличьте (коллективный) газ. 3: Наслаждайтесь! И не забудьте убирать газ, если Вы теряете контроль за аппаратом: повреждения будут намного меньше. Важно: Не используйте большие пропеллеры, чем Вам необходимы. Легкие пропеллеры дают более быстрый отклик и больше стабильности. Активное управление должно производиться в среднем положении газа (1/3 - 2/3 хода ручки). Добиться этого можно варьируя больший/меньший диаметр и шаг пропеллера, моторы с различными KV или аккумуляторы с большим/меньшим количеством банок.