УДК 004.932.2 ИНТЕГРАЛЬНОЕ ВЫДЕЛЕНИЕ СТРУКТУРНЫХ ОСОБЕННОСТЕЙ ИЗОБРАЖЕНИЯ INTEGRAL LOCALIZING OF IMAGES'S STRUCTURE FEATURES
реклама

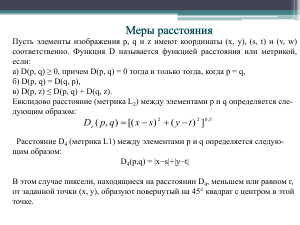
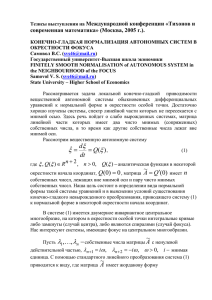
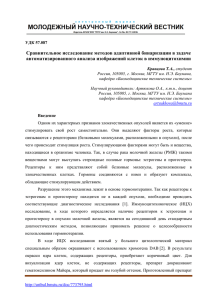
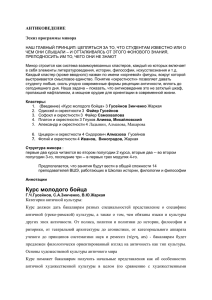
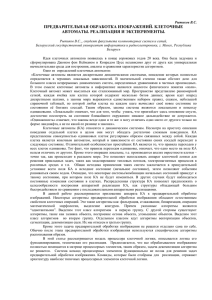
УДК 004.932.2 В.В. Пехтерев, С.В. Вишняков, М.К. Чобану V.V. Pekhterev, S.V. Vishnyakov, M.K. Tchobanou ИНТЕГРАЛЬНОЕ ВЫДЕЛЕНИЕ СТРУКТУРНЫХ ОСОБЕННОСТЕЙ ИЗОБРАЖЕНИЯ INTEGRAL LOCALIZING OF IMAGES'S STRUCTURE FEATURES Предлагается подход к выделению структурных особенностей изображения, основанный на применении интегрального преобразования Радона. Методика позволяет локализовать области с особенностями границ представленных на изображении объектов. Повышенный интерес такие области представляют для задач формирования признаков объектов с целью их распознавания и идентификации для некоторого множества изображений. Новизна, заключается в применении интегральных преобразований и оптимизационных процедур в общей постановке задачи. Ключевые слова: цифровая обработка изображений, распознавание образов. At article proposed approach to localizing some image's features, such as edges, corners, integsections. Method operate with integral representations and able to form smozed characteristics using optimization procedures Keywords: digital image processing, pattern recognition. Введение Im M R1 R2 ; R1, R2 R Пусть изображение: – двумерное точечное подмножество, с заданным отображением на множество значений яркости или цвета. Описание проводится для монохромного изображения, цветной случай можно покрыть покомпонентно, либо взвешенным усреднением. Пиксель – элемент из Z 2 , полученного дискретизацией множества Im . Компактное подмножество пикселей с выраженной статистической зависимостью значений функции яркости/цвета понимается как объект . Представляют интерес границы таких подмножеств. Описание границы возможно перечислением принадлежащих ей пикселей, введением кусочной параметризации: g : [t1, t 2 ] Z . Рассмотрим значения кривизны g'' полученных линий в терминах дифференциальной геометрии. Области содержащие границы могут тогда классифицироваться как обладающими особенностями параметризации: 1. Пересечения – области с неоднозначной параметризацией рис. 1а 2. Углы и изломы – локальные максимумы кривизны рис. 1б 3. Концы – области с краевыми значениями параметра t рис. 1в 4. Краевые участки – области с малой кривизной, рис. 1г В работе объекты соответствуют связным областям с близким Рисунок 1 – Объекты значением яркости/цвета (математического ожидания (м.о.) для и их особенности пикселей окрестности), границам соответствуют участки со скачкообразным изменением. Предлагается использовать дополнительные этапы обработки изображения, основанные на нелинейной фильтрации градиента, приводящие к получению специального векторного поля [6]. Суть подхода в адаптивной фильтрации векторного поля градиента с использованием банка фильтров. Выборка фильтра происходит на основе локального анализа м.о. аргумента исходного поля. Области слабо коррелированные впоследствии экспоненциально подавляются в соответствии со значением дисперсии аргумента. Подобный подход позволяет получать более «стабильное» поведение алгоритма последующей трассировки, и может рассматриваться как повышающий достоверность последующих решений, анализирующих поле градиента. Обзор существующих методик Существуют хорошо зарекомендовавшие себя решения, позволяющие помечать множества пикселей принадлежащие границам (алгоритмы Канни [4,1], Собеля [1,2]) и углам (детектор Харриса [5]). Общей чертой является работа с так называемым векторным полем градиента яркости Im : x Im, y Im TA M . Его значение получается с помощью разностной аппроксимации и подвергается фильтрации, с целью подавить входные шумы. Алгоритм Собеля сравнивает абсолютное значения поля в точке с установленной пороговой величиной и принимает решение о принадлежности пикселя к границе. Алгоритм Канни проводит анализ соседних пикселей, вводя дополнительную категорию кандидатов на принадлежность границе, получая в результате связные участки границ. Преимущество алгоритмов в вычислительной простоте процедур, приводящей к эффективной реализации с малыми затратами ресурсов времени и памяти. Однако слабость критерия классификации приводит ложным срабатываниям, необходимостью тонкой настройки пороговых величин, отсутствием адаптивности к разным диапазонам входных значений в пределах выборки. Локализация углов на основе метода Харриса предполагает оценку корреляции окрестности точки с её сдвинутой копией. Тогда для направлений, соответствующих сторонам угла ожидается наличие локальных максимумов отображения. Har : PR1 R, cor Imx0 , y0 , mx0 x, y0 y В линейном приближении имеем следующее выражение Im 2 x Im y Im T x, y M x, y , M x y Im 2 x Im y Im Задача сводится к оценке собственных значений 1, 2 матрицы M , сводящее ситуацию к следующим случаям: 1. 1 p, 2 p 2. 1 p, 2 p , или наоборот 3. 1 p, 2 p Тогда ситуация 1 соответствует наличию угла, 2 – края, 3 – однородной области, либо участку со случайной структурой. Метод хорошо работает с острыми углами (рис. 1а-в), плохо реагирует на плавные и сглаженные участки (рис. 1е). Актуальны проблемы выбора пороговых величин, и чувствительности к масштабу. Наиболее существенным же является то, что принятие решения происходит для центра предполагаемой окрестности, размер которой не может быть малым – для обеспечения достоверности. Это приводит в росту вычислительной сложности при попытке локализовать особенность с меньшим масштабом, поскольку пересчёт должен производиться в каждой точке-кандидате. Интегральное выделение особенностей Предлагается подход к локализации особенности, содержащейся в некоторой окрестности точки, с указанием её положения, оптимального с точки зрения квадратичного критерия. Пусть f – векторное поле градиента, подвергшееся упомянутой выше предварительной обработке [6]. Базовой операцией метода является вычисление преобразования Радона[3]: f s, f t a s a , a dt , a cos , sin , Im где под , понимается скалярное произведение векторов в E 2 . Элемент пространства преобразования можно интерпретировать как отклик исходной области на детектор в виде прямой линии. Для локальной окрестности найдём точку x0 , y0 , имеющую минимальный квадрат расстояния до касательных к границам, с учётом весовой функции на основе . Для этого необходимо минимизировать функционал R f x0 , y0 t , t 2 dtd относительно движения центра окрестности изображения в искомую точку. Вычисление точки происходит итерационно. Вычислим м.о. длинны перпендикуляра к касательной для каждого из направлений m t , tdt . Построим вектор смещения как взвешенную сумму: 1 y w m cos d x w m sin d , 2 где w D Dmax , D – убыль дисперсии t , t 2 dt для смещения на m в направлении . Вычисление w составляет наиболее трудоёмкую часть алгоритма, поскольку требует нахождения t , для точек кандидатов. Существенным является вид операторов преобразования, сопряжённых к группе ортогональных преобразований окрестностей изображения, их параллельного переноса и масштабирования. Для сдвиговых преобразований вида f Tsh : f x, y f x k z , y k y , k k z , k y относительно : определено преобразование, сопряжённое Tsh * : s, s k , , , , Для ортогональных и масштабирующих преобразований соответствующие операторы имеют вид: Tso : f r f r ', r r ' , arg( r ) arg( r ' ) Tso* : s, s, , Tsc : f r f r ', r r ' , arg( r ) arg( r ' ) Tsc * : s, s, , Относительно простой вид указанных операторов, позволяет модифицировать результат исходного преобразования для пробных точек, вместо повторного вычисления. Результаты приведены на рис.2. Рисунок 2 – Векторное поле смещений в экстремальные точки Посредством итеративной процедуры, можно перейти от значений R в каждом узле к распределениям , p характеризующим тенденцию к изменению масштабного разрешения при смещении в направлении из некоторого узла сети. Будем называть значение , p в точке масштабным дескриптором. Выберем некоторое разбиение изображения сеткой с узлами p ; для p смежные узлы определяют углы b и векторы. Для каждого узла вычислим R . Примем , p 0 1, 0,2 , тогда для i 0, N : 1. Сканирование окрестности точки: sa, p i 1 exp R 2. 2 sgmR b a b b, p pb i exp ab 2 sgm Модификация дескриптора: , p i 1 , p i s , p i 1 Количество итераций N линейно зависит от характерных размеров объектов и может также динамически определяться для каждого узла в отдельности, из оценки max , p i 1 , p i . Тогда при необходимости повторные вычисления могут быть опущены на шаге 𝑛 с принятием , p n k , p n , k , k 0 . Результат вычисления для изображения с объектами-примитивами приведён на рис.3. Яркость пропорциональна max , p min , p . Рисунок 3 – Поле масштабного дескриптора Можно видеть удовлетворительное поведение внутри «полостей», позволяющее приступить к формированию скелетизирующих объектов, спеклов соответствующих объектам тел. Заключение Описанные методы позволяют формировать широкий спектр сигналов, отвечающих особенностям структуры объектов, применимый в качестве входной информации для процедур морфологического анализа. Перспективно формирование на базе масштабных карт дескрипторов формы локальных окрестностей, сочетающих в себе информацию нескольких разрешающих слоёв. Метод способствует решению задачи отождествления объектов на кадрах видеопоследовательностей и восстановления полей межкадровых трансформаций. Литература 1. Б Яне. Цифровая обработка изображений. – М.: Техносфера–2007–584с 2. Гонсалес Р. С., Вудс Р. Э. Цифровая обработка изображений. – М.: Техносфера, 2006. – 1072 с. 3. Ярославский Л.П. Введение в цифровую обработку изображений. – М.: Советское радио, 1979 – 315 с. 4. Canny J. A Computational Approach to Edge Detection/ IEEE trans. on pattern analysis and machine intelligence. № 6. -1986. -с. 679–698 5. C. Harris, M. Stephens. A Combined Corner and Edge Detector. Proceedings of the 4th Alvey Vision Conference. – 1988. – с. 147-151 6. Пехтерев В.В., Вишняков С.В., Чобану М.К. Адаптивная триангуляция и сжатие изображений// Информационные технологии. 2013. № 5. С. 41-46. Реквизиты для справок: Россия, Москва, НИУ МЭИ, каф. Электрофизики информационных систем, Пехтерев Виталий Валерьевич. [email protected]