8.1 Основные гипотезы. Расчетная модель стержня.
advertisement

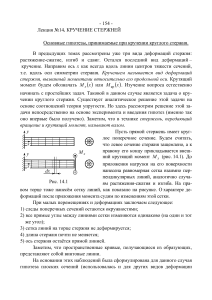
Лекция №8 8.1 Основные гипотезы. Расчетная модель стержня. 8.2 Вывод формул для нормальных напряжений в поперечных сечениях 8.3 Связь между изгибающим моментом и кривизной элемента стержня. 8.4 Чистый плоский изгиб, нормальные напряжения. 8.1 Основные гипотезы. Расчетная модель стержня. Рассмотрим задачу определения нормальных напряжений x в произвольной точке К поперечного сечения прямого стержня в общем случае его нагружения (рис. 8.1). Наряду с напряжение x на площадках параллельных оси стержня развиваются напряжения y , z . Однако опыт показывает, что на основной части длины стержня эти напряжения, как правило, бывают значительно меньше напряжений x . Поэтому в расчетной модели стержня пренебрегаем влиянием напряжений y , z на деформацию элемента, т.е. в формуле обобщенного закона Гука для x получаем: z 0 (8.1) y 0 1 x ( x ( y z )) x x E E Рис. 8.1 Напряжения y , z малы по сравнению с x Рис. 8.2 Иллюстрация к гипотезе плоских сечений Допущение (8.1) называют гипотезой о ненадавливании продольных волокон: волокна стержня, параллельные его оси, испытывают деформацию растяжения – сжатия в продольном направлении и не оказывают давления друг на друга в поперечном направлении. Вторая важнейшая гипотеза о характере деформирования модели стержня это гипотеза плоских сечений (рис. 8.2): поперечные сечения балки, плоские до деформации, остаются плоскими и перпендикулярными искривленной оси балки после деформации. Это положение позволяет рассматривать поперечное сечение стержня как бесконечно тонкое плоское тело (жесткая пластика), имеющее в отношении перемещений конечное число степеней свободы. На рис.8.3, а-в показаны три характерных перемещения сечения (с координатой x): продольное поступательное перемещение wC и два поворота на углы z , y . Рис. 8.3 Три независимых перемещения плоского сечения и перемещение точки К от поворота на угол z На рис. 8.3, г показана проекция сечения, повернутого на угол z при взгляде на сечение вдоль оси z. Произвольная точка К, имеющая координату y >0, получит отрицательное перемещение z y ( sin( z ) z ), так как это перемещение противоположно оси x. Суммарное перемещение произвольной точки К определится по формуле: (8.2) w wc z y y z Формула (8.2) есть математическое выражение гипотезы плоских сечений. На рис. 8.4, а представлена модель стержня, иллюстрирующая гипотезу ненадавливания продольных волокон и гипотезу плоских сечений. Рис. 8.4 Модель стержня Модель представляет набор жестких пластинок – «поперечных сечений», пространство между которыми заполнено «продольными волокнами», условно изображенными в виде упругих пружин. Деформация растяжения – сжатия продольных волокон происходит за счет относительного перемещения и поворота соседних сечений (рис 8.4, б ). 8.2 Вывод формул для нормальных напряжений в поперечных сечениях Пусть в рассматриваемом сечении известны усилия: N , M z , M y . Выразим через них напряжения x . С учетом формул (8.1), (8.2), (2.12) получим: (8.3) d y dw d dw x E x E E( C z y z) dx dx dx dx Обозначим для данного сечения постоянные: (8.4) d d y dw E z С2 ; E C С1 ; E С3 . dx dx dx Перепишем (8.3) с учетом обозначений (8.4) x C1 C 2 y C3 z (8.5) Формула (8.5) показывает, что x изменяется по закону плоскости, определяемой тремя константами: C1 , C 2 , C 3 . Для определения констант необходимо потребовать, чтобы x приводились к трем силовым факторам (см. формулы 1.2) (8.6) N xdA M z y xdA M y z xdA A A A Формулы (8.6) следуют из рис. 8.4 Рис. 8.4 Напряжения x в поперечном сечении распределены по линейному закону Подставляем последовательно выражение для напряжений(8.5) в формулы (8.6) . В результате получим: N C1 dA C 2 ydA C3 zdA A A A 2 M z C1 ydA C 2 y dA C3 yzdA A A A (8.7) M y C1 zdA C 2 zydA C 3 z 2 dA A A A С учетом выражений для геометрических характеристик поперечных сечений получим: C1 A C 2 S z C3 S y N ; (8.8) C S C J C J M ; 1 z 2 z 3 zy z C1S y C2 J zy C3 J y M y . В уравнениях (8.8) введены следующие обозначения: площадь и статические моменты площади относительно осей z и y (8.9) A= dA ; S z ydA ; S y zdA ; A A осевые и центробежный моменты инерции 2 J y z 2 dA ; J z y dA ; A A A J zy zydA . (8.10) A Будем считать, что оси z,y главные центральные оси, тогда S z 0, S y 0, J zy 0 . (8.11) В результате система (8.8) распадается на три независимых уравнения, из которых находим: (8.12) M N My C1 C2 z C3 A Jz Jy Подстановка выражений (8.12) в формулу (8.5) дает общую формулу для нормальных напряжений (8.13) M N M x z y+ y z Jy A Jz Плоскости z-x, y-x, содержащие ось стержня и одну из главных осей сечения, называются главными плоскостями изгиба стержня. В формуле (8.13) растягивающая продольная сила N положительна, изгибающие моменты M z, M y также положительны, если они в точке, принадлежащей первой четверти осей координат (где z>0,y>0), вызывают растягивающие напряжения (см.рис.8.4). 8.3 Связь между изгибающим моментом и кривизной элемента стержня. Подставим значения констант C1 , C 2 , C 3 (8.12) в формулы (8.4), в результате получим: d z M (8.14) dwC d y My N z ; ; . dx EJ z dx EA dx EJ y Соотношения (8.14) используются для определения перемещений сечений стержня при растяжении - сжатии и изгибе (EA-жесткость при растяжении-сжатии; EJ z , EJ y -жесткости сечения при изгибе). Рассмотрим рис. 8.5. Учитывая, что dx ds z d z получим: d z Mz 1 d y My 1 y z dx z EJ z EJ y dx y Здесь z 1 z ,y 1 y (8.15) - кривизны элемента стержня. Рис. 8.5 К определению связи кривизны элемента и изгибающего момента Запишем соотношение между радиусом кривизны z и относительным удлинением z произвольного продольного волокна балки с координатой y (аналогично для y ) ds z d z , ds yd z , x y z ; y z y . (8.16) 8.4 Чистый плоский изгиб, нормальные напряжения. Пусть во всех поперечных сечениях стержня N=0; My=0; M z 0 и стержень изгибается в главной плоскости xy . Изгиб в этой плоскости называется плоским изгибом. Пусть на участке стержня M z const . Такой случай нагружения стержня называется чистым плоским изгибом (ЧПИ). В соответствии с формулой (8.13) получим M (8.17) x z y Jz Рис. 8.6 Изгиб в главной плоскости xy . Сечение поворачивается вокруг нейтральной линии По высоте сечения имеем две зоны – растяжения и сжатия, их разделяет нейтральный слой, продольные волокна которого искривляются, но не меняют свой длины. Линия пересечения нейтрального слоя и плоскости поперечного сечения (n-n) называется нейтральной линией (совпадает с осью z). Рис. 8.7 За счет действия поперечных сил сечения искривляются. При чистом изгибе сечения остаются плоскими.