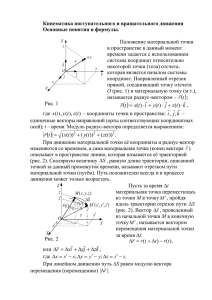
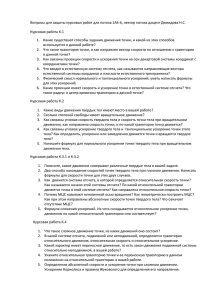
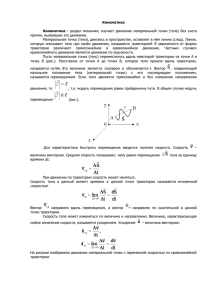
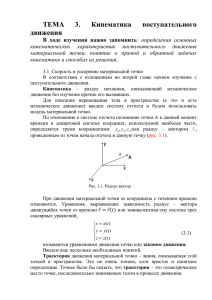
ЛЕКЦИЯ 1 КИНЕМАТИКА МАТЕРИАЛЬНОЙ ТОЧКИ Вопросы лекции: 1. Материальная точка. Твердое тело. Система отсчета. Число степеней свободы для материальной точки, твердого тела. 2. Траектория, путь, перемещение 3. Скорость. Физический смысл производной и интеграла. 4. Ускорение. Нормальное и тангенциальное ускорения. Центр и радиус кривизны траектории. 5. Виды движения. Равномерное и равнопеременное прямолинейное движение 6. Кинематика вращательного движения. Угловая скорость. Угловое ускорение. Равнопеременное вращение. 1. Материальная точка. Твердое тело. Система отсчета. Число степеней свободы для материальной точки, твердого тела. Физика – это наука о природе. Она возникла из стремления понять и описать окружающий нас мир. Физика – это раздел естествознания, который изучает наиболее общие свойства и формы материи. Материя – это философская категория, изображающая объективную реальность, существующую вне сознания человека, которая отображается, копируется, фотографируется чувствами человека и существует независимо от них. Известно два вида материи: вещество и поле. К веществу относятся, например, атомы, молекулы, и все построенные из них тела. Второй вид материи образуют электромагнитные, гравитационные поля. Эти виды материи неразрывно связаны друг с другом и могут превращаться друг в друга. Например, электрон и позитрон (представляют собой вещество) могут превращаться в фотоны (т.е. электромагнитное поле). Механика – раздел физики, изучающий наиболее простое движение материи. Движение материи происходит в пространстве и времени, т.о. пространство и время – формы существования материи. Изучение поведения тел в механике основано на двух основных моделях тел: материальной точке и абсолютно твердом теле. Тело, размерами которого в условиях данной задачи можно пренебречь, называется материальной точкой. Тело, конечных размеров называется абсолютно твердым, если в условиях данной задачи можно пренебречь его деформацией. Механическое движение – это изменение положения тел или их частей в пространстве с течением времени относительно друг друга. Тело, по отношению к которому рассматривается движение какого-то другого тела, называется тело отсчета. Для описания положения материальной точки вводится система координат. Совокупность тела отсчета, системы координат и часов, отсчитывающих время, называется системой отсчета. Число независимых движений, которые может совершать тело, называют числом степеней свободы. Число степени свободы – это число, которое можно задать для описания положения тел системы. Например, материальная точка имеет три степени свободы если она двигается в пространстве: поступательное движение вдоль оси x, y, z; при движении на плоскости достаточно две координатные оси, следовательно в этом случае число степеней свободы равно двум, а при движении вдоль прямой – число степеней свободы равно одному. Абсолютно твердое тело может обладать тремя степенями свободы поступательного движения, тремя степенями свободы вращательного движения, если тело не абсолютно твердое и его части могут смещаться друг относительно друга, то необходимо вводить еще дополнительные три степени свободы колебательного движения. Выбор системы отсчета позволяет описать движение рассматриваемых тел. Координаты – это функции времени: x(t) = x; y(t) = y; z(t) = z (1) Уравнения (1), с помощью которых можно предсказывать положение точки, называется кинематическим уравнением движения тела. Если указать не только начальное положение точки, но и указать направление движения, то задача упрощается (вместо трех уравнений – получится одно уравнение): ⃗ ⃗ (2), где ⃗ - радиус вектор, проведенный из начала координат в точку М. Уравнения (1) и (2) равносильны. Если ввести единичные векторы характеризующие направление осей координат, то положение точки можно выразить через данные вектора. Свойства векторов: |⃗| | ⃗| | ⃗⃗| ⃗ ⃗⃗⃗⃗ , ⃗ ⃗⃗⃗⃗ , ⃗⃗ ⃗⃗⃗ Сумма трех векторов: ⃗⃗⃗⃗ ⃗⃗⃗⃗ ⃗⃗⃗ равна радиус-вектору ⃗: ⃗⃗⃗⃗ ⃗⃗⃗⃗ ⃗⃗⃗ ⃗ ⃗ ⃗⃗ ⃗ (3) 2. Траектория, путь, перемещение Линия, описывающая движение тела, называется траекторией. Длина траектории от точки М1 до точки М2 – это путь. Путь – это скалярная физическая величина равная сумме длин отрезков траектории. Вектор, соединяющий начальное положение тела с конечным, называется перемещением ⃗. Модуль малого приращения равен длине соответствующей ему дуги траектории: | ⃗| В зависимости от формы траектории различают прямолинейное и криволинейное движения точки. 3. Скорость. Физический смысл производной и интеграла Для характеристики движения материальной точки вводят векторную физическую величину – скорость. Пусть материальная точка движется по криволинейной траектории так, что в момент t1 она находилась в точке М1, а в момент времени в точке М2 При движении материальной точки относительно системы отсчета меняется направление перемещения: ⃗⃗⃗⃗ ⃗⃗⃗⃗ ⃗ Время, потраченное на перемещение ⃗: Вектором средней скорости называют отношение приращения за интервал времени Δ t к его величине: ⃗ ⃗⃗⃗⃗⃗⃗ ⃗ радиус-вектора точки (4) Вектор средней скорости характеризует только быстроту движения материальной точки за минимальный промежуток времени. Направление вектора совпадает с направлением перемещения ⃗ . Если в выражении (4) перейти к пределу, устремляя к нулю, то получим выражение для мгновенной скорости: ⃗ ⃗ ⃗ ⃗ (5) По мере уменьшения длина пути все больше будет приближаться к модулю радиусвектору | ⃗| , поэтому модуль мгновенной скорости | ⃗| (6) Если за произвольные равные промежутки времени точка проходит пути разной длины, то численное значение ее мгновенной скорости с течением времени изменяется. Такое движение называют неравномерным движением. В этом случае пользуются скалярной величиной, называемой средней путевой скоростью. Она равна отношению пройденного пути к интервалу времени, в течение которого был совершен этот путь: (7) Если численное значение мгновенной скорости остается во время движения точки неизменным, то такое движение называют равномерным. Длина пути, пройденного точкой за время : ∫ (8) Геометрический смысл интеграла – это площадь фигуры. Следовательно, путь равен площади криволинейной фигуры в случае неравномерного движения и площади прямоугольника, при равномерном движении. 4. Ускорение. Нормальное и тангенциальное ускорения. Центр и радиус кривизны траектории При движении материальной точки еѐ скорость может непрерывно меняться как по величине (модулю), так и по направлению. Пусть за время движущаяся точка перешла из положенияА в положение В, и вектор ее скорости ⃗ изменился на ⃗, тогда отношение вектора ⃗ к называется средним ускорением неравномерного движения: ⃗⃗⃗⃗⃗⃗ ⃗⃗ (9) Ускорением или мгновенным ускорением, точки в момент времени t называют векторную величину ⃗⃗, равную пределу, к которому стремиться среднее ускорение этой точки в промежуток времени от tдо при неограниченном уменьшении ⃗ ⃗⃗ ⃗⃗⃗⃗⃗⃗ ⃗⃗ ⃗ (10) Ускорение измеряется в м/с2. Ускорение, характеризующее изменение скорости по модулю, называется тангенциальным ускорением: (11) Таким образом, тангенциальная составляющая ускорения описывает изменение модуля скорости и направлена вдоль скорости, т. е. по касательной к траектории. Нормальная составляющая ускорения возникает только при криволинейном движении. (12) Величину R называют радиусом кривизны траектории. В частном случае вектор нормального (центростремительного) ускорения направлен к центру. Полное ускорение равно сумме тангенциального и нормального ускорений: ⃗⃗ ⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ (13) Тангенциальное и нормальное ускорения взаимно перпендикулярны между собой, поэтому модуль полного ускорения: √ (14) 5. Виды движения. Равномерное и равнопеременное прямолинейное движение Движение тел принято разделять на несколько простых видов: поступательное, вращательное и колебательное. При поступательном движении прямая, соединяющая две произвольные точки тела, переносится параллельно себе самой. Для изучения поступательного движения тела достаточно изучить движение какой-либо одной из его точек, т. к. все точки тела движутся совершенно одинаково. При вращательном движении тела все его точки описывают окружности в параллельных плоскостях, причем центры этих окружностей лежат на одной прямой, называемой осью вращения. Колебаниями называются движения, повторяющиеся во времени, в окрестности некоторого положения равновесия. Например, если мы подтолкнем шарик, висящий на нити, то он будет совершать колебания около своего первоначального отвесного положения. Равномерное прямолинейное движение – это движение, при котором материальная точка за любые равные промежутки времени совершает одинаковые перемещения. | ⃗| ⃗ (скорость по направлению и модулю остается постоянной) ⃗ ⃗ При равномерном прямолинейном движении полное перемещение равно пройденному пути ⃗ Кинематическое уравнение движения: Равнопеременное прямолинейное движение – это движение, при котором направление скорости остается постоянным, а модуль изменяется. Полное ускорение Скорость ⃗ ⃗ ⃗ При равномерном прямолинейном движении полное перемещение равно пройденному пути ⃗ ⃗ ⃗⃗⃗⃗⃗ Кинематическое уравнение движения: 6. Кинематика вращательного движения. Угловая скорость. Угловое ускорение. Равнопеременное вращение При описании вращательного движения тела величинами S, v и а (путь, скорость, ускорение) пользоваться неудобно, т. к. различные точки (с разными радиусами вращения R) тела за один и тот же промежуток времени совершают разные перемещения и движутся с различными скоростями и ускорениями. Поэтому здесь вводятся специальные, так называемые угловые величины: угол поворота φ, угловая скоростьω, угловое ускорение ε. Для различных точек вращающегося тела они одинаковы. Рассмотрим движение материальной точки по окружности радиуса R (рис.). Положение частицы на окружности можно характеризовать углом φ, отсчитывая его от фиксированного радиуса, например, совпадающего по направлению с осью х (ОА на рисунке). Тогда аналогом перемещения AS вдоль окружности будет соответствующее этому перемещению изменение угла Δφ. По аналогии со скоростью прямолинейного движения введем угловую скорость точки: (15) Угловая скорость определяет изменение угла φ (т. е. Δφ) в единицу времени. Измеряя углы в радианах, а время в секундах, в качестве единицы угловой скорости выбирают угловую скорость такого движения, при котором угол φ меняется на один радиан за одну секунду, эту единицу угловой скорости можно обозначить рад/с; обычно ее обозначают просто 1/с или с -1. При равномерном вращении (ω= const) зависимость угла от времени определяется формулой: (16) Пусть Т - период обращения частицы, т. е. время совершения ею одного оборота вокруг центра вращения О. За время Δt = Т угол φ возрастает на 2π, т. е. Δφ = 2π. Поэтому (17) Введем в рассмотрение число оборотов в единицу времени - частоту v. Так как один оборот совершается за время Т, то, следовательно, за единицу времени будет совершено оборотов (18) Отсюда, учитывая выражение (18), получаем еще одно выражение для угловой скорости ω. (19) Частота v измеряется в оборотах в секунду или герцах Гц. Один герц равен одному обороту в секунду и обозначается Гц =с -1. Нормальное ускорение: (20) Если вращение неравномерное, угловая скорость является функцией времени. Ее производную по времени называют угловым ускорением. (21) Угловое ускорение, как видно измеряется в c -2. При равнопеременном вращении ε = const и выражения для ω и φ: До сих пор выражения для угловой скорости и углового ускорения записывались в скалярном виде. Теперь рассмотрим эти величины как векторы. Для определения направления этих величин необходимо использовать правило буравчика (или правило правой руки): сопоставляем направление вектора угловой скорости с поступательным движением буравчика, а вращение линейной скорости - с направлением вращения ручки буравчика (рис.). Угловое ускорение определяется ⃗ ⃗⃗. Если . Если - движение равнозамедленное, то ⃗ движение равноускоренное, то ⃗⃗. Аналогия между поступательными и вращательными величинами: Поступательное движение Равномерное Равнопеременное Вращательное движение Связь величин